基于AIS信息和BP神經網絡的船舶航行行為預測
2017-10-30 08:13:56金永興胡勤友施朝健王勝正
中國航海 2017年2期
關鍵詞:船舶
甄 榮,金永興,胡勤友,施朝健,王勝正
(上海海事大學 商船學院,上海 201306)
基于AIS信息和BP神經網絡的船舶航行行為預測
甄 榮,金永興,胡勤友,施朝健,王勝正
(上海海事大學 商船學院,上海 201306)
針對船舶航行行為多維度的特點和船舶交通服務系統(Vessel Traffic Service,VTS)對船舶行為預測的精確度和實時性需求,提出結合船舶自動識別系統(Automatic Identification System,AIS)信息和BP(Back Propagation)神經網絡的船舶航行行為預測方法。構造基于AIS信息的船舶航行行為特征表達方法,根據BP神經網絡預測的基本原理,以連續3個時刻的船舶航行行為特征值為輸入,以第4個時刻的船舶航行行為特征值為輸出,對BP神經網絡進行訓練,用于對未來船舶航行行為進行預測。以成山角VTS水域內的船舶AIS信息為例進行試驗,結果表明:利用該方法對船舶航行行為特征值進行預測的結果準確、實時,誤差在可接受的范圍內。
水路運輸;船舶行為;預測;AIS信息;BP神經網絡
在沿海和港口水域,特別是在交通密度較大、態勢復雜的海域,利用船舶交通服務系統(Vessel Traffic Service,VTS)精確、有效地對船舶的航行行為進行實時跟蹤預測是海上交通事故預測和預警的重要技術支撐,對提高海上交通監管效率和降低交通風險具有重要意義。當前已有較多針對船舶行為預測的研究:文獻[1]運用卡爾曼濾波算法對船舶自動識別系統(Automatic Identification System,AIS)觀測數據進行最小二乘法估計,得到平滑的船舶運動軌跡,對船舶行為數據進行預測;文獻[2]將改進卡爾曼濾波算法應用到船舶運動軌跡處理中,對船舶運動軌跡進行預測;文獻[3]運用競爭神經網絡對船舶航行狀態進行探測和跟蹤,通過擴展卡爾曼濾波對船舶航行狀態進行估計;文獻[4]運用支持向量機模型對橋區水域內失控船舶的航跡進行預測;文獻[5]引入基于時間序列的船舶航行位置預測算法,對船舶航行位置進行預測;文獻[6]設計基于三層BP(Back Propagation)神經網絡的航跡預測模型,以船舶航向和航速作為輸入、以經度差和緯度作為輸出來神經訓練網絡參數,實現船舶位置預測;文獻[7]結合馬爾科夫鏈和灰色模型對內河船舶軌跡進行預測。在卡爾曼濾波、支持向量機和灰色模型的船舶軌跡預測方法中,需構建船舶運動學方程,而風、流等環境因素對船舶運動的影響較大,干擾的隨機性和多樣性直接導致運動的復雜性。從VTS監控系統的角度考慮,船舶行為預測必須具備時效性,而實時準確地建立數學方程不僅較難實現,而且對數據源要求較高,大多數方法只適用于理想狀態。基于神經網絡的船舶軌跡預測方法具有用時短、誤差小和通用性強的特點[6],適合VTS對船舶軌跡預測實時、高效的需求。文獻[6]僅通過BP神經網絡對船舶的空間航行位置進行預測,而完整的船舶航行行為需包括船舶的速度和航向特征。基于此,在已有研究的基礎上,提出結合船舶AIS信息和BP神經網絡對沿海VTS監控海域內船舶的航行行為進行預測,將船舶AIS數據作為船舶行為的表征數據,在船舶航行軌跡特征的基礎上考慮船舶航行速度和航向等特征,在船舶航跡預測的基礎上實現多維的船舶航行行為特征預測。
1 基于AIS信息的船舶航行行為分析
船舶的航行行為主要體現在船舶的航行位置、速度和航向隨時間的變化上,對應的船舶AIS信息中的動態信息分別為時間(TIME)、經度(LONGITUDE)、緯度(LATITUDE)、SOG(Speed Over Ground)和COG(Course Over Ground)等。為區分不同船舶的航行行為,將船舶的海上移動業務識別碼(Maritime Mobile Service Identity,MMSI)加入到船舶航行行為表征數據中。由此,基于AIS信息的船舶航行行為可表示為
Vessel_Behavior(MMSI,TIME)=
{ LONGITUDE,LATITUDE,SOG,COG }
(1)
在該模型中:MMSI用來區分和表征船舶;TIME標識船舶航行行為的時間特性;LONGITUDE和LATITUDE表征船舶航行行為的空間屬性;SOG表征船舶航行行為的速度特性;COG表征船舶航行行為的方向特性。這里采用的船舶AIS原始信息由船隊在線[8]提供,經接收和解碼后存儲在My SQL數據庫中,以方便查詢和調用。船舶AIS信息存儲結構示意見圖1。
在數據庫中,按照船舶航行行為數據表征的需求設計MMSI,TIME,LONGITUDE,LATITUDE,SOG和COG等字段,并將MMSI和TIME作為主鍵,以方便查詢和處理船舶AIS信息。
2 基于BP神經網絡的船舶航行行為預測模型
2.1BP神經網絡結構
BP神經網絡是一種根據誤差反向傳播算法訓練的多層前饋神經網絡,其架構示意見圖2。[9]
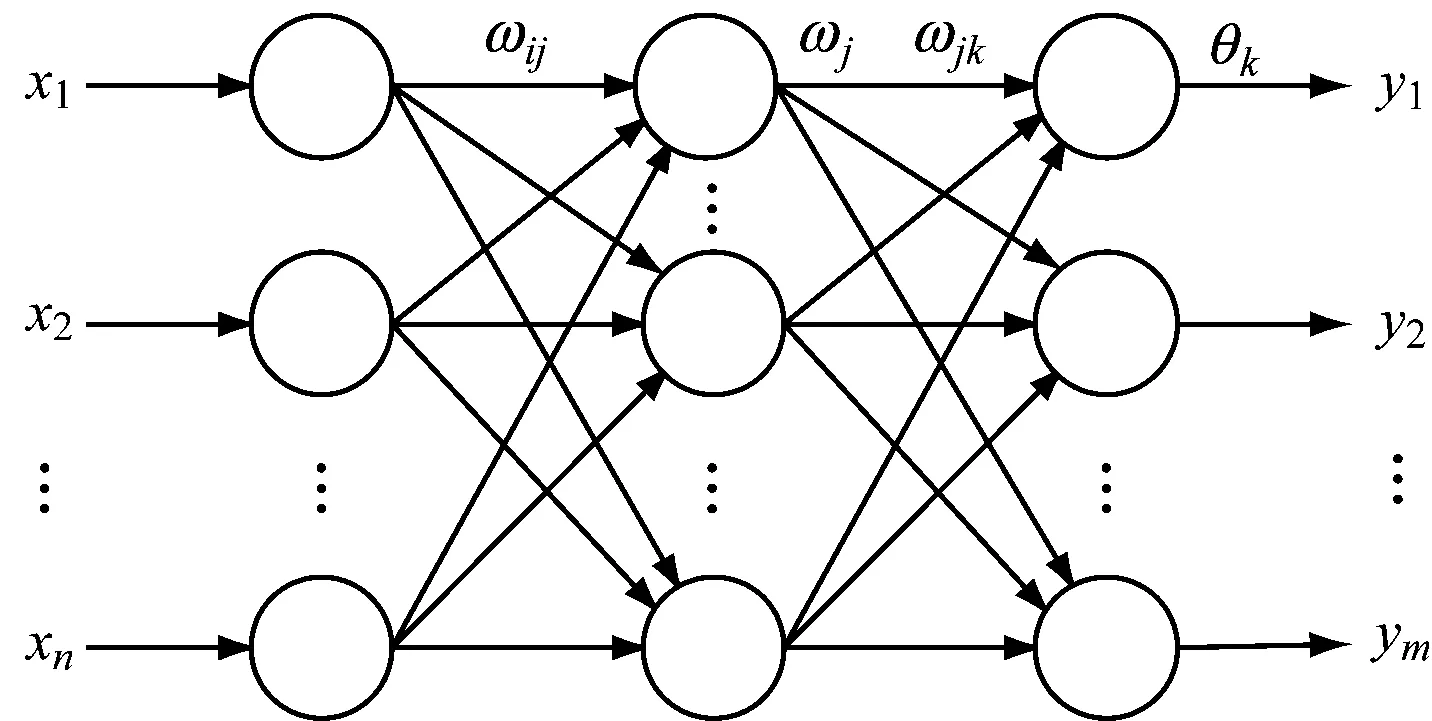
圖2 BP神經網絡架構示意
圖2為標準的BP神經網絡結構,包括輸入層、隱含層和輸出層,其中:輸入層包含n個神經元節點(i=1,2,…,n),輸入向量為u=(x1,x2,…,xn)T;隱含層包含l個神經元節點(j=1,2,…,l);輸出層包含m個神經元節點(k=1,2,…,m)。ωij為輸入層神經元與隱含層神經元之間的連接權重;ωjk為隱含層神經元與輸出層神經元之間的連接權重;θj為隱含層神經元的閾值;θk為輸出層神經元的閾值。
BP神經網絡是一種有監督的神經網絡,預測時首先要利用梯度下降法逐層訓練和更新網絡的權值及閾值,通過訓練使網絡具備聯想記憶和預測能力,具體訓練過程[9]如下。
1) 參數初始化。根據系統輸入輸出序列(x,y)確定網絡輸入層神經元節點數n和輸出層節點數m,對ωij及ωjk進行初始化,初始化θj和θk,設置合適的網絡學習速率和傳遞函數。
2) 隱含層輸出計算。根據ωij及θj,由式(2)得到網絡隱含層輸出值H。

(2)
式(2)中:l為隱含層神經元節點數;f()為隱含層傳遞函數,有多種表達形式,在BP神經網絡中通常用S型函數,其表達式為
f(x)=1/(1+e-x)
(3)
3) 輸出層輸出計算。運用H,ωjk和θk,計算輸出值O。
(4)
式(4)中:m為輸出層神經元節點數;φ為輸出層傳遞函數,通常取線性函數,其表達式為
φ(x)=x
(5)
4) 誤差計算。采用單樣本訓練的方法計算誤差和更新權值[10],每輸入一個樣本,都要回傳誤差并進行調整,根據網絡預測誤差輸出O和期望輸出y,計算網絡預測誤差e。
ek=yk-Ok,k=1,2,…,m
(6)
5) 權值更新。根據e,利用梯度下降方法,通過計算誤差對相應參數的偏導數,得到權值和閾值的更新值,從而更新ωij和ωjk,使誤差遞減。
式(7)和式(8)中:η為學習率,通常在0~1內取值;i=1,2,…,n;j=1,2,…,l;k=1,2,…,m。
6) 閾值更新。根據e更新θj和θk。
式(9)和式(10)中:j=1,2,…,l;k=1,2,…,m。
7) 判斷更新后的權值和閾值計算誤差,若小于設定的網絡設定誤差,則迭代結束;若沒有達到要求,則重復步驟2)~步驟6),直到滿足要求。
2.2BP神經網絡參數分析
2.2.1輸入輸出參數分析
為減小輸入數據間數量級差別較大引起的網絡預測誤差,需對輸入數據作歸一化處理,處理后所有數據都轉化為[0,1]內的數據。這里采用離差標準化方法對訓練數據進行歸一化,轉換式為
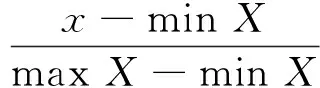
(11)
式(11)中:x為原始訓練數據;maxX為訓練數據的最大值;minX為訓練數據的最小值;x*為轉換后的數據;經過離差標準化處理的數據消除量綱和數據取值范圍的影響,保留原來數據中存在的關系。
在運用神經網絡對船舶航行行為特征值進行預測之后,還需根據式(11)對預測結果進行反歸一化處理,使預測得到的數據符合實際意義。
2.2.2神經網絡隱含層神經元個數選擇
BP神經網絡的輸入層和輸出層神經元個數由訓練數據的特征決定,在具體的訓練中,隱含層神經元個數的選擇對網絡的預測精度有較大影響。若節點數設置太少,則神經網絡不能很好地對數據進行學習,訓練過程中需增加訓練次數,網絡精度低;若節點數設置太多,則會導致訓練時間增加和網絡過擬合,最終影響神經元的性能。
對于隱藏層節點數的確定,通常采用經驗公式確定估值,以此作為初始值,通過試驗進行試湊,選取訓練之后識別誤差最小的值作為隱藏層節點數。根據文獻[11],采用的經驗公式為
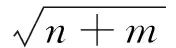
(12)
式(12)中:M為隱藏層節點數;m為輸入層節點數;n為輸出層節點數;a為[0,10]內的常數,在實際中需根據經驗公式確定最佳范圍,采用試湊法確定最佳隱含層神經元節點數。
2.3船舶航行行為預測模型
當前,VTS中心主要通過接收雷達信息和船舶AIS信息獲取表征船舶航行行為的數據,這里選用船舶AIS數據。船舶行為預測是從VTS中心跟蹤和監控海上船舶交通的需求出發,運用BP神經網絡進行船舶行為預測,思路是將海域內船舶的歷史行為狀態和當前行為狀態作為網絡輸入,將未來船舶行為表征數據作為網絡輸出,通過與真實值相對比訓練網絡,建立歷史船舶行為與未來船舶行為表征數據之間的映射關系,實現對未來船舶行為狀態的推算和預測。對于單艘船舶,其在t時刻的行為Y(t)可表示為
Y(t)={λt,φt,Vt,Ct}
(13)
式(13)中:λt,φt,Vt,Ct分別為船舶在t時刻的經度、緯度、對地航速和對地航向。
通常船舶未來時刻的船舶行為狀態是歷史行為狀態或當前行為狀態隨時間運動和變化的結果。因此,為提高船舶行為預測的準確性,將t-2,t-1和t等連續3個時刻的船舶航行行為數據Y(t-2),Y(t-1)和Y(t)作為網絡輸入,將t+1時刻的船舶航行行為表征數據Y(t+1)作為輸出,訓練神經網絡的參數。根據BP神經網絡訓練過程中的數學表達式,船舶航行行為預測模型的表達式為

(14)
對于式(14),可從表達式形式上將其看作是一個以過去時間序列的船舶航行行為特征[Y(t-2),Y(t-1),Y((t)]為自變量,以未來時刻船舶航行行為特征值Y(t+1)為函數值的一個非線性映射函數。
3 實例分析
為驗證所提方法的有效性,以成山角VTS水域內船舶AIS信息為試驗數據,構建BP神經網絡模型,進行船舶行為實時預測。由于船舶AIS設備發射數據的頻率取決于船舶航行速度,因此為保證預測時間間隔的一致性,選擇航速在3~14 kn的在航船舶發射的數據,此時AIS數據的發射頻率為10 s。[12]選取保證是有效傳輸和接收的時間間隔為10 s的165組船舶AIS數據作為原始數據(150組作為訓練數據,余下15組作為測試數據),以此測試訓練后網絡預測的預測性能。根據式(13)和式(14)及船舶航行行為的AIS數據表征模型可得到神經網絡預測模型為一個具有12個輸入神經元節點、4個輸出神經元節點的網絡,由式(13)估算得到隱含層神經元的最佳個數區間為[4,14]。
對訓練數據作離差歸一化處理,設定不同隱含層神經元節點,將t-2,t-1和t等連續3個時刻的船舶行為表征數據Y(t-2),Y(t-1),Y(t)作為網絡輸入,將t+1時刻的船舶行為表征數據Y(t+1)作為輸出,以此訓練BP神經網絡的各項參數。在試驗中,可設置不同的隱含層神經元節點數,通過比較神經網絡均方誤差值,選擇誤差最小的神經元個數作為參數,試驗過程中不同隱含層神經元節點下神經網絡的均方誤差見圖3。
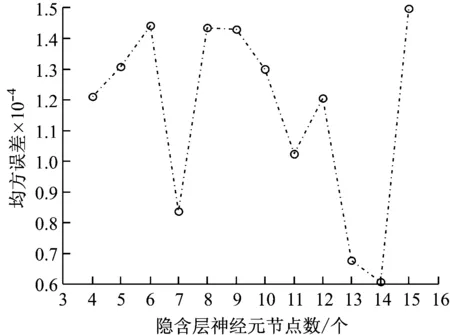
圖3 網絡均方誤差分布
由圖3可知,當隱含層神經元節點為14個時,神經網絡的均方誤差最小,因此可將神經網絡的最佳隱含層神經元節點數設置為14個,所選實例的船舶航行行為預測模型是一個12-14-4結構的BP神經網絡。
根據確定的最佳網絡結構及訓練好的BP神經網絡參數,將Y(148),Y(149)和Y(150)等3個時刻的船舶行為數據作為BP神經網絡的初始輸入,通過遞歸的方法逐步預測Y(151)~Y(165)的船舶行為表征值,得到的預測值及誤差分析見圖4~圖7。
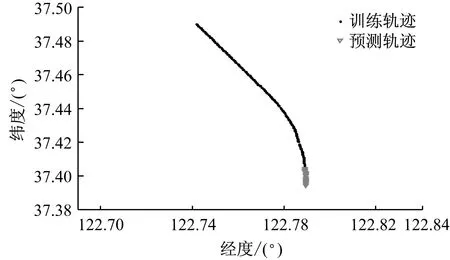
圖4 船舶軌跡預測結果
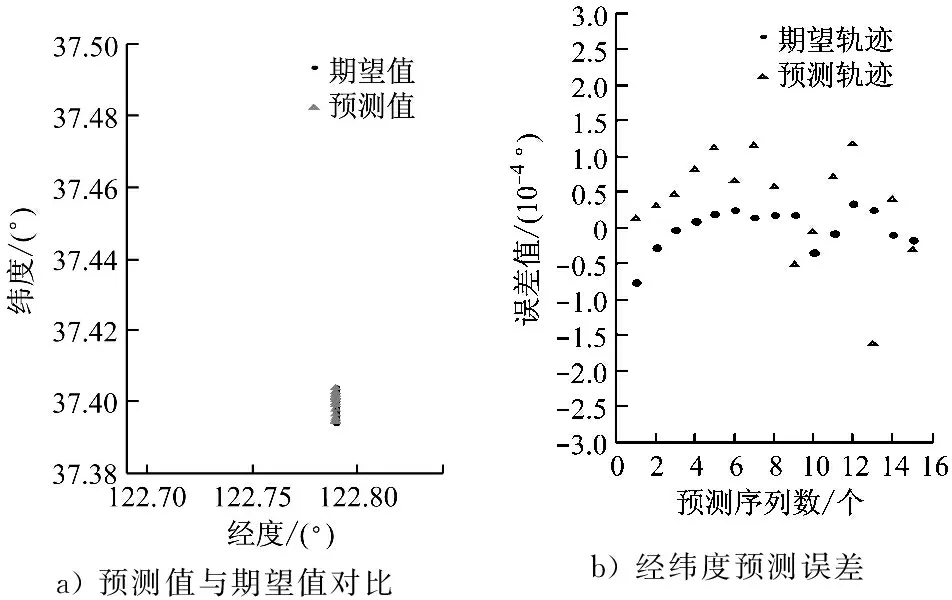
a)預測值與期望值對比b)經緯度預測誤差
圖5 船舶軌跡預測誤差
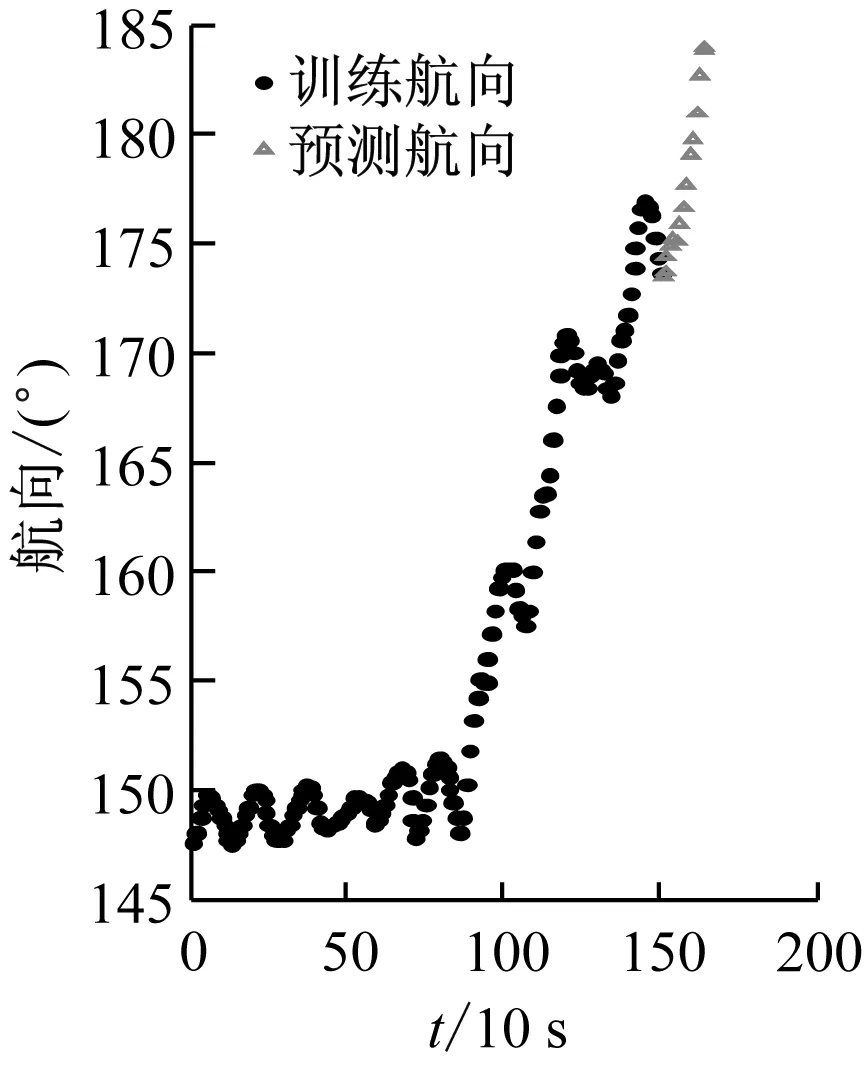
a) 航向預測

b) 航向預測誤差圖6 船舶航向預測結果
在圖4中,實心點為訓練集船舶軌跡(經度、緯度)分布,三角號為運用BP神經網絡預測得到的船舶軌跡,可看出預測的軌跡運動延續了訓練集船舶的航行趨勢。
為定量表達預測軌跡與期望軌跡之間的誤差,在圖5中對其進行對比,其中實心點和三角號分別代表經度誤差及緯度誤差。從圖5a中可看出,預測軌跡值與期望軌跡值近乎重疊;從圖5b中可看出,15個船舶經緯度預測誤差值最大為1.5×10-4。
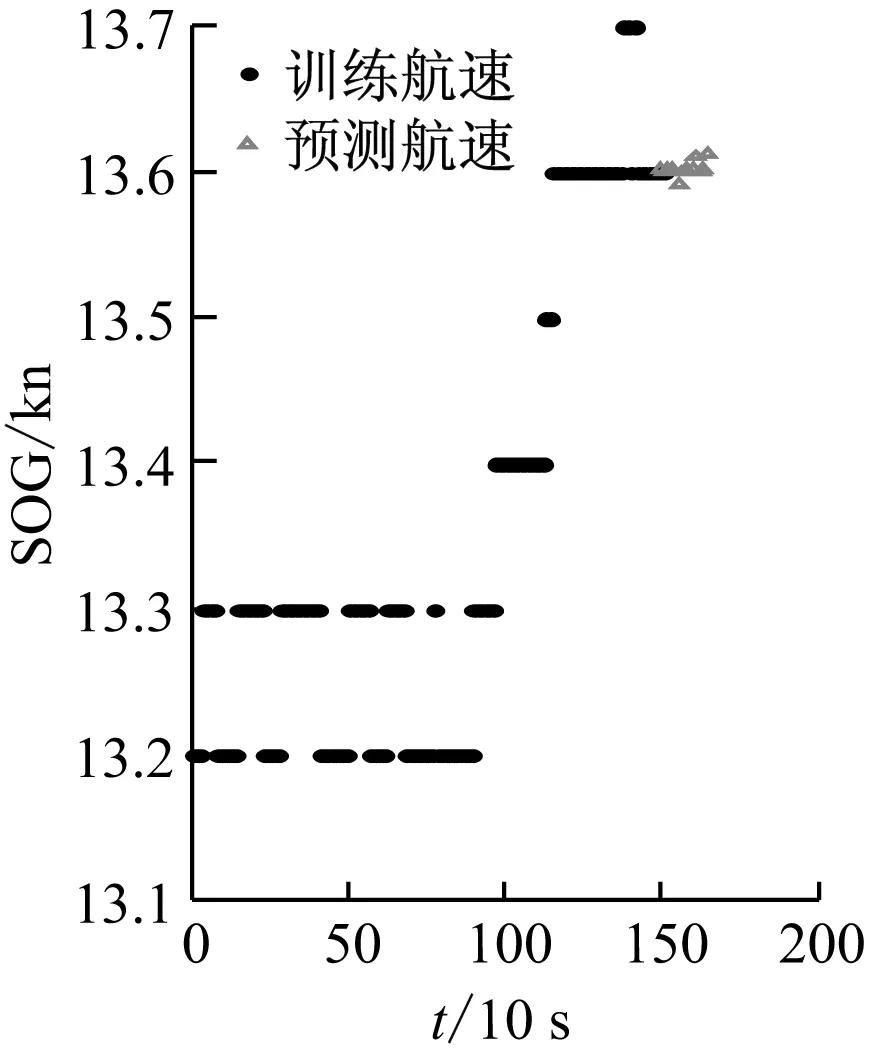
a) 航速預測
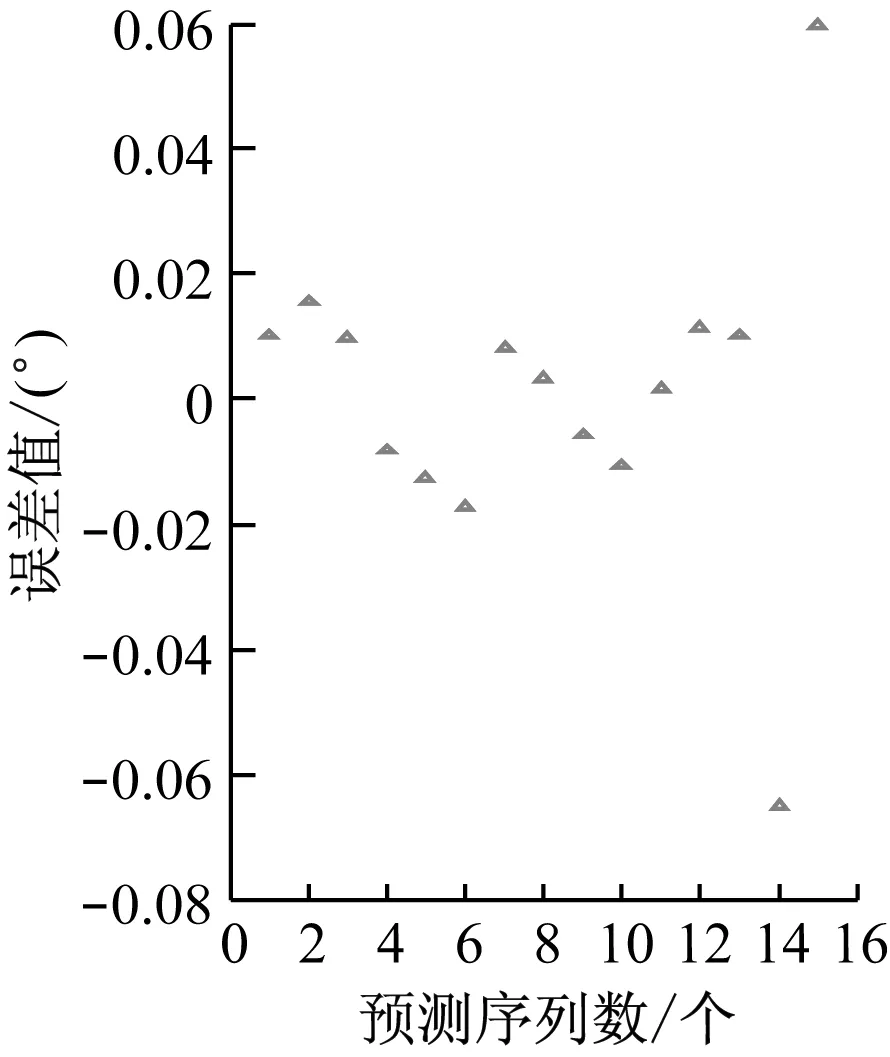
b) 航速預測誤差圖7 船舶航速預測結果
圖6為船舶航向預測結果,圖6a中用三角號標識的預測航向與訓練航向的變化趨勢一致,由圖6b可知船舶航向預測誤差最大為1°。圖7為船舶航速預測結果,由圖7b可知船舶航速預測的誤差值最大為0.06 kn。
通過對VTS中心值班人員和船舶駕駛員進行調研可知,船舶軌跡的經度、緯度、航向和航速等船舶航行行為特征值預測誤差均在可接受的范圍內,預測結果的精度滿足VTS中船舶航行行為監控和航海實踐的需求。
4 結束語
通過對船舶航行行為預測進行研究,根據船舶AIS信息的特點,構建基于AIS信息的船舶航行行為表達模型,提出結合AIS信息和BP神經網絡的船舶航行行為預測方法。運用提出的方法對成三角VTS水域內150組船舶航行行為數據進行試驗,利用訓練好的BP神經網絡對后續船舶行為特征值進行預測。通過對預測值和原有的15組真實的測試數據進行誤差對比分析,得到BP神經網能對船舶的經度、緯度、航速及航向等船舶行為特征值隨時間發展變化進行有效的學習和辨識,從而對未來船舶航行行為進行精確、實時的預測。該研究可為VTS中船舶航行行為預測提供新的理論依據。
本文以歷史船舶行為特征數據作為神經網絡的訓練數據驗證所提出方法的可行性,接下來將利用船舶行為各項預測誤差實時更新和優化神經網絡的參數,實現船舶行為的在線學習和預測,以進一步減小船舶行為預測誤差,提高船舶航行行為各項特征值的預測精度。
[1] 徐鐵,蔡奉君,胡勤友,等.基于卡爾曼濾波算法船舶AIS軌跡估計研究[J].現代電子技術,2014,37(5):97-100.
[2] 趙帥兵,唐誠,梁山,等.基于改進卡爾曼濾波的控制河段船舶航跡預測[J].計算機應用,2012,32(11):3247-3250.
[3] PERERA L P,OLIVEIRA P,SOARES C G.Maritime Traffic Moni-toring Based on Vessel Detection,Tracking,State Esti-mation,and Trajectory Prediction[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1188-1200.
[4] 王艷鋒,李紅祥.橋區水域失控船舶的航跡預測[J].武漢船舶職業技術學院學報,2011,10(4):36-38.
[5] 劉錫鈴,阮群生,龔子強.船舶航行GPS定位軌跡的新預測模型[J].江南大學學報(自然科學版),2014,13(6):686-692.
[6] 徐婷婷,柳曉鳴,楊鑫.基于BP神經網絡的船舶航跡實時預測[J].大連海事大學學報,2012,38(1):9-11.
[7] TONG Xiaopeng,CHEN Xu,SANG Lingzhi,et al.Vessel Trajectory Prediction in Curving Channel of Inland River[C]//The 3rd International Conference on Transportation Information and Safety,2015.
[8] 上海邁利船舶科技有限公司.船隊在線[EB/OL].(2015-05-15)[2016-05-05].http://www.hifleet.com.
[9] 韓敏.人工神經網絡基礎[M].大連:大連理工大學出版社,2014:49-52.
[10] 高鵬毅.BP神經網絡分類器優化技術研究[D].武漢:華中科技大學,2012.
[11] 張慶慶,賀興時.BP神經網絡結點數選取的改進方法及其應用[J].西安工程大學學報,2008,22(4):502-505.
[12] 孫文力,孫文強.船載自動識別系統[M].大連:大連海事大學出版社,2004:21.
VesselBehaviorPredictionBasedonAISDataandBPNeuralNetwork
ZHENRong,JINYongxing,HUQinyou,SHIChaojian,WANGShengzheng
(Merchant Marine College,Shanghai Maritime University,Shanghai 201306,China)
In view of the multi-dimensional characteristics of vessel behavior,a novel method of vessel behavior prediction based on AIS(Automatic Identification System) data and BP(Back Propagation) neural network is proposed to satisfy the requirement of VTS(Vessel Traffic Service) for accurate real-time vessel behavior prediction.The feature expressions of vessel behavior based on AIS data is established.The training process is as following:the longitude,latitude,heading and speed of a vessel is taken as the ship behavior feature input to the neural network; data at three consecutive times are input to the network,and the fourth data following the input is output to train the BP neural network.The trained BP neural network is applied to the prediction of vessel behavior.The effectiveness and capability of the proposed method is verified with the AIS data from the waters of Chengshanjiao VTS.The results show that the method can predict the characteristics of vessel behavior timely with acceptable accuracy.
waterway transportation; vessel behavior; prediction; AIS data; BP neural network
U675.7;TP391
A
2017-02-26
國家自然科學基金(51379121);國家留學基金委聯合培養博士生項目(201608310093);上海市科委地方院校能力建設項目(15590501600);上海海事大學研究生創新基金(2016ycx077);上海海事大學優秀博士學位論文培養項目(2017bxlp003)
甄 榮(1990—),男,內蒙古烏蘭察布人,博士生,從事海上交通信息處理方向研究。E-mail:zrandsea@163.com
1000-4653(2017)02-0006-05
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
