船舶異常行為研究進展及發(fā)展趨勢
2017-10-30 08:13:57劉甜甜初秀民陳良臣曹秀峰
中國航海 2017年2期
高 曙, 劉甜甜, 初秀民, 陳良臣,2, 曹秀峰
(1.武漢理工大學 a.計算機科學與技術學院; b.交通物聯(lián)網技術湖北省重點實驗室;c.智能交通系統(tǒng)研究中心,武漢 430063;2.中國勞動關系學院 計算機教研室,北京 100048)
船舶異常行為研究進展及發(fā)展趨勢
高 曙1a,1b, 劉甜甜1a, 初秀民1c, 陳良臣1a,2, 曹秀峰1a
(1.武漢理工大學 a.計算機科學與技術學院; b.交通物聯(lián)網技術湖北省重點實驗室;c.智能交通系統(tǒng)研究中心,武漢 430063;2.中國勞動關系學院 計算機教研室,北京 100048)
對船舶異常行為的研究進展、存在的問題及未來發(fā)展趨勢進行總結和分析。對船舶行為及其異常識別的基本概念和分類進行介紹,提出船舶異常行為識別過程;對船舶異常行為的檢測方法進行歸納分類,分述各類方法的研究現(xiàn)狀,并剖析存在的問題;針對航運大數(shù)據及云計算的利用,闡述船舶異常行為研究面臨的機遇和挑戰(zhàn),說明其未來發(fā)展方向。
水路運輸;船舶異常行為;AIS數(shù)據;大數(shù)據;云計算
據《2014年度交通運輸安全生產事故報告》(水上交通領域)統(tǒng)計,在全口徑事故(包括等級以下事故)數(shù)據中,僅碰撞事故就涉及船舶1 285艘,占發(fā)生事故船舶總數(shù)的71.5%。[1]由此可見,隨著水上運輸業(yè)務日益增多,交通流密度日益加大,船舶逐步朝大型化、專業(yè)化和高速化方向發(fā)展,通航環(huán)境將愈加復雜,影響船舶航行安全的因素將不斷增多,水上交通事故發(fā)生概率將進一步增大,會給國民經濟和生命財產安全帶來嚴重威脅。
船舶是水上交通的行為主體,對其異常行為進行研究是水上安全監(jiān)控和管理的重要內容。近年來,隨著船舶自動識別系統(tǒng)(Automatic Identification System,AIS)、船舶交通管理系統(tǒng)(Vessel Traffic Service,VTS)、雷達及各類傳感器等設備的應用不斷深入,船舶航行過程中自動采集的船舶動態(tài)數(shù)據、靜態(tài)數(shù)據和水文氣象數(shù)據等呈現(xiàn)出幾何增長的態(tài)勢。[2]因此,對船舶航行數(shù)據進行分析并找出其規(guī)律,由此識別出船舶航行的異常行為,是目前水上交通領域的研究熱點之一。
1 船舶行為及其異常識別的概念
船舶行為一般指船舶在駕駛人員的操縱下以航行和避讓為主要目的所采取的行為方式及其規(guī)律。[3]在水上交通研究中,船舶行為不是某艘船舶的某種具體行為,而是船舶群體的同類行為方式及其規(guī)律。當前船舶航行異常行為的定義還沒有統(tǒng)一,“異常”一般是指觀測到的事物與所期望的事物、現(xiàn)有準則及現(xiàn)有科學理論有所不同的現(xiàn)象。因此,船舶異常行為研究應建立在船舶正常行為建模之上,以此為標準,將觀察到的數(shù)據與正常模型相比較,找出差異較大的個體行為(例如橫穿主航道、船速過快和偏離航道等)。
異常檢測方法通常包含候選異常檢測和異常可靠性分析2個階段。在候選異常檢測階段,通過數(shù)理統(tǒng)計分析和數(shù)據挖掘等技術檢測異常數(shù)據,構成候選異常數(shù)據。在可靠性分析階段,對候選異常數(shù)據進行過濾和篩選,得到有用的異常數(shù)據。
由于船舶異常行為具有時空特性,因此在對候選異常數(shù)據進行檢測時不僅要檢測在時間和空間上表現(xiàn)為異常的數(shù)據,還要根據其專題屬性(例如速度、航向角等)與其正常行為的比較,判斷是否有偏離。同時,由于船舶異常行為受多種因素的影響,因此特別需要將船舶異常行為的可靠性分析置于具體的時空情境下進行[3],并結合領域知識或先驗知識對可能造成船舶危險的異常進行辨識。由此,可將船舶異常行為研究分解為圖1的形式。
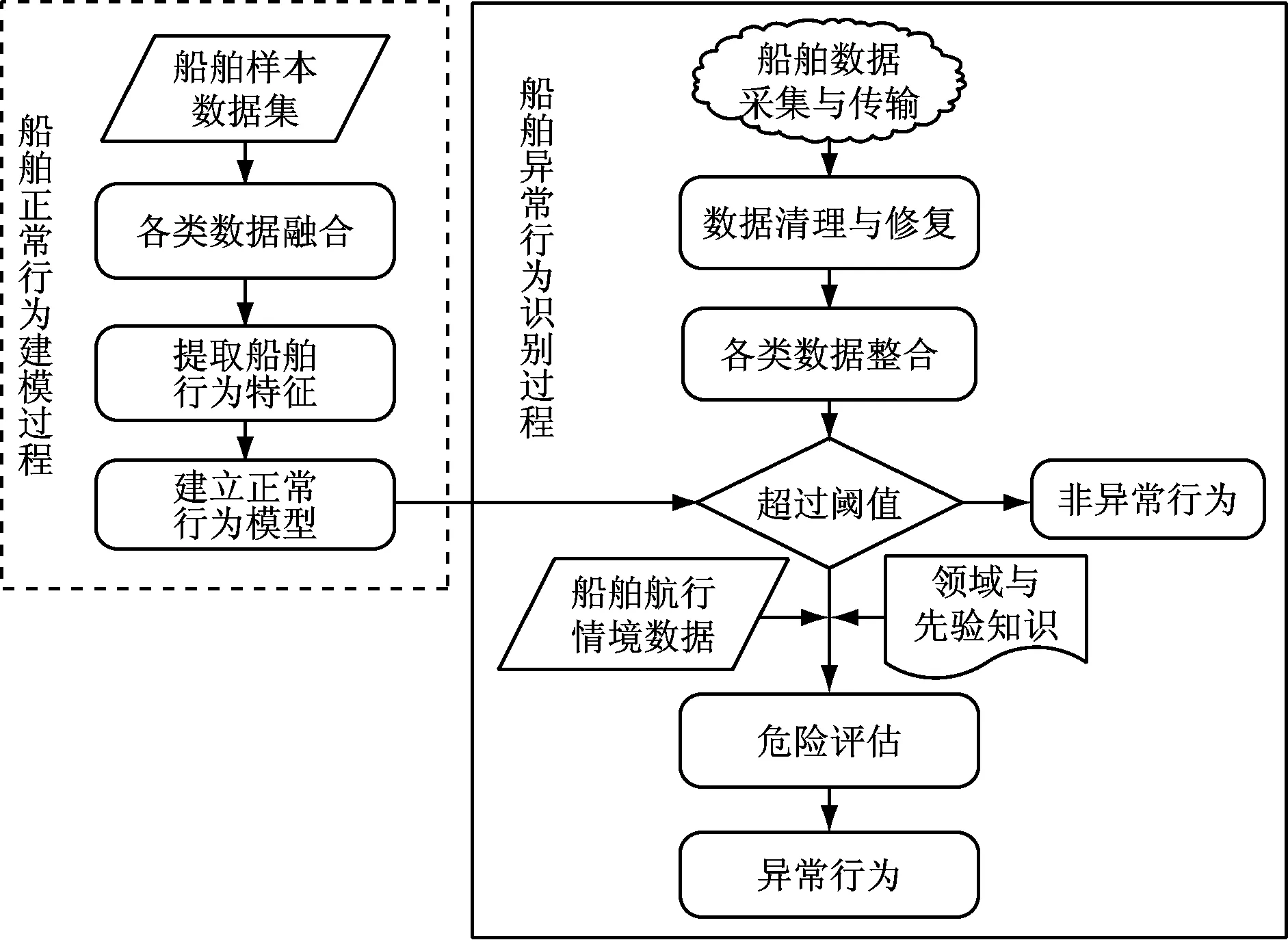
圖1 船舶異常行為識別過程
2 船舶異常行為分類
目前對船舶行為的研究大多從船舶密度、船舶速度、船舶軌跡及船舶間距等4個方面描述船舶總體行為特征,船舶異常行為主要根據其運動、位置上的異常進行判別。因此,根據文獻[4],將船舶異常行為分成16大類(見圖2),船舶航行異常檢測一般需將其全部覆蓋。
3 船舶異常行為研究進展
當前,數(shù)據挖掘領域中的異常檢測方法眾多(主要有基于分布的方法、基于距離的方法、基于密度的方法、基于深度的方法和基于聚類的方法等5類),但結合船舶行為特點進行異常識別的研究[5-7]較少。文獻[6]提出一種基于卡爾曼濾波的船舶航行軌跡異常行為預測方法,通過DBSCAN算法對AIS歷史數(shù)據進行密度聚類得到正常的船舶歷史航跡圖譜,結合卡爾曼濾波算法對船舶航行軌跡和船舶實時數(shù)據狀態(tài)進行預測,并給予實時警告。
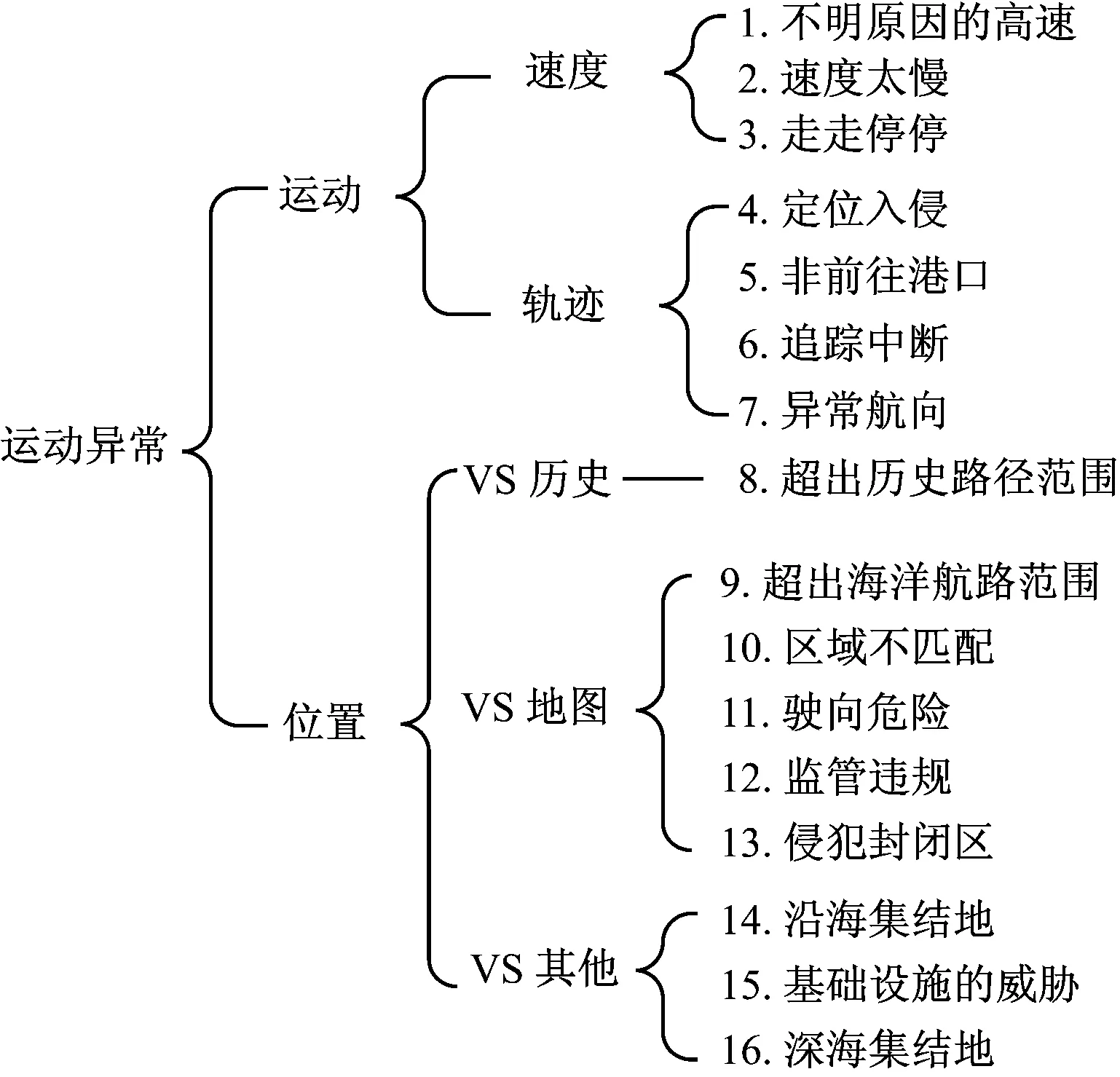
圖2 船舶異常行為分類
當前國外已有不少針對船舶航行異常檢測的技術和方法,可進一步將其細化為基于神經網絡的方法、基于統(tǒng)計的方法和基于機器學習的方法[4],每種方法又采用1種或多種技術(見圖3)。
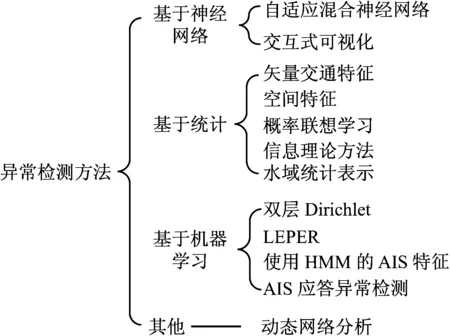
圖3 船舶異常行為研究方法分類
3.1基于神經網絡的方法
當前針對基于神經網絡的異常檢測的研究有很多,且應用多種多樣。神經網絡能很好地歸納一些不可見的模式,學習復雜的分類界線。WAXMAN等[8]提出一種利用傳統(tǒng)方法不能解決的船舶群體復雜行為問題求解方法,用船舶群體的中心代替整個船舶群體,將船舶運動分解到RED三維上求和,利用RED三維上的軌跡形成船舶運動軌跡,通過神經網絡方法對軌跡進行分類。RIVEIRO等[9]提出一種基于高斯模型聚類的異常檢測方法,在圖形可視化中加入用戶交互,在數(shù)據處理過程中對已有知識或經驗進行實時更新,提高準確率和可靠性。RHODES等[10-11]利用AIS數(shù)據,通過人工神經網絡模型學習船舶正常行為,從而進行船舶異常行為檢測和軌跡預測;此外,以AIS數(shù)據為樣本,提出一種模糊神經網絡模型,學習正常的船舶運動,實現(xiàn)對船舶異常行為的識別。
基于神經網絡的異常檢測方法存在的最大問題是整個訓練過程非常封閉。輸入神經元與輸出神經元之間的處理不易理解,不能為操作者提供解釋或理由。在神經網絡準備好分類新數(shù)據之前,需進行培訓和測試,以進行網絡調整和閾值確定等。
3.2基于統(tǒng)計的方法
基于統(tǒng)計的方法有參數(shù)統(tǒng)計和非參數(shù)統(tǒng)計2類,其中:參數(shù)統(tǒng)計方法在數(shù)據有對應統(tǒng)計模型的前提下,可采用無監(jiān)督方式迅速檢測到異常;非參數(shù)統(tǒng)計方法中數(shù)據的基礎分布沒有任何假定。盡管該方法需更多資源,但被認為是一種較為實用的自動化異常檢測方法。SOLEIMANI等[12]從幾何學的角度分析船舶航線,使用A*算法找出最優(yōu)路徑,引入軌跡長度、曲線面積、緯度軌跡梯度和經度軌跡梯度等4個特征,采用無監(jiān)督增量學習方法比較船舶真實軌跡與最優(yōu)路徑的特征偏離,獲得軌跡異常值。該方法無需訓練,不受地理空間大小的限制,可應用在更大范圍內和不同的數(shù)據集上。LEI[13]提出一種針對海域移動對象探索軌跡行為的異常檢測模型,使用船舶相應的位置信息構建概率樹,探究航行軌跡并判斷其是否異常。該模型可解決數(shù)據過多、過于復雜的問題,但只能檢測是否發(fā)生異常,難以獲取異常軌跡的信息。JEONG等[14]提出一種基于使用概率主題模型的區(qū)域和速度觀測軌跡模式建模方法,通過將高斯模型嵌入到離散主題模型中,將語義識別的LDA算法應用到軌跡預測上,使用分步貪心算法進行分類,提出雙階段在線推理模型,提高交通分析模式和異常檢測的效率及精準度。該方法考慮時空關系及對象速度,并使用分步貪心算法,因此可減少問題的維度。AVRAM等[15]提出一種基于海域時空數(shù)據的異常檢測方法,定義一個坐標與時間的數(shù)據集,結合數(shù)據驅動和模型驅動2種方法逐級對數(shù)據進行檢測,并與感興趣的行為對比,判斷是否為異常行為或異常行為描述。該方法的優(yōu)點是結合2種方法,能全面檢測;不足是實現(xiàn)難度較大,且需建立大量模型,難以設定一個好的標準。LIU等[16]提出一種基于密度的船舶運動軌跡知識聚類方法,從歷史AIS數(shù)據中提取出正常軌跡作為集群中心(即中心向量),將離群較多的點定義為異常;同時,將速度考慮在內,設定相應的速度閾值,超出范圍即為異常。JAKOB等[17]以樣本軌跡數(shù)據為對象,構建一個混合高斯模型(Gaussian Mixture Model,GMM),學習不同類型船舶的正常行為模式,探測異常的和非法的船舶行為。BALDACCI等[18]提出一種矢量交通特征的概念,為獲取與海中航線相關的矢量,使用AIS聯(lián)絡點和圖像處理技術,在地圖上標記AIS聯(lián)絡站點,經過過濾,利用一種邊緣檢測算法提取海洋的段,對這些段進行聚類,每個聚類只選取1個段,每個選出的段將形成特征為高斯分布的海道區(qū)域,船舶根據自身與相應段的距離關聯(lián)海道區(qū)域。
基于統(tǒng)計的異常檢測方法很容易實現(xiàn),但僅限于處理特定的問題。若異常被均勻地分散在樣品中,則統(tǒng)計方法是無效的。此外,由于很難確定一個正常分布分離異常值的閾值,因此統(tǒng)計方法存在誤報的可能性很大。
3.3基于機器學習的方法
機器學習方法是指自動學習復雜的數(shù)據結構、已有的異常和正常模式,對異常行為的特征進行概率推斷和模糊匹配,建立學習模型,從而發(fā)現(xiàn)未知的異常,提高異常檢測的自適應性。目前使用的技術主要有決策樹、遺傳編程、支持向量機、貝葉斯網絡和聚類等。LANE等[19]提出一種基于貝葉斯網絡聚變的異常行為檢測方法,將船的異常行為總結為偏離、AIS接收異常、異常抵港、相互靠近和區(qū)域進入等5種,計算每種異常行為發(fā)生的概率,使用貝葉斯網絡對各種異常行為進行聚變,得出該行為產生威脅的概率。WANG等[20]提出一種針對船舶航線活動異常的二層檢測方法,其中:第1層考慮速度和方向噪聲,提出一種基于密度的空間聚類算法DBSCAN_SD,采用非監(jiān)督技術對數(shù)據點進行預聚類,判斷是正常還是異常,并標記;第2層在Hadoop上對標記數(shù)據訓練并行元學習算法,提高效率。SNIDARO等[21]提出基于異常分層和馬爾可夫邏輯網絡的態(tài)勢檢測工具,將海洋異常分為4層,使用JDL混合模型建立相關性,提出一種基于馬爾可夫邏輯網絡的海洋態(tài)勢檢測工具,更好地檢測船舶運行過程中的異常態(tài)勢。KOWALSKA等[22]提出一種基于高斯處理數(shù)據驅動的無參貝葉斯模型,通過主動學習AIS歷史數(shù)據選擇一個訓練集,使用高斯處理法創(chuàng)建一個正常船舶的運動模型,根據速度、航向及對應的經緯度對船舶狀態(tài)進行異常度量。OKTARINA等[23]提出一種使用支持向量機的船舶追蹤異常檢測方法,使用SVM分類器采集大量的船舶正常行駛和非正常行駛原始數(shù)據集,將這些數(shù)據集分成2組,分別進行訓練和測試,探究最佳樣本比例。TAN等[24]提出一種隱馬爾可夫異常檢測模型,機器學習一種特定程序的正常行為,通過比對檢測到異常;同時,構造一個隱馬爾可夫模型,設計一種基于HSMM的異常檢測算法,用于計算入侵檢測系統(tǒng)監(jiān)控過程與完善正常過程,基于最大熵原理(MEP),引入平均信息熵的概念(AIE),構造出計算機系統(tǒng)的正常行為。MASCARO等[25]提出一種基于貝葉斯網絡的船舶追蹤異常檢測模型,獲取AIS數(shù)據,使用貝葉斯網絡的概率推理模型進行分析,建立靜態(tài)和動態(tài)2個模型,對未知行為進行預測,獲取數(shù)據并進行對比,判斷是否出現(xiàn)軌跡異常。LUO等[26]提出一種改進的無監(jiān)督異常檢測算法,該算法結合誤用檢測和異常檢測,使用誤用檢測提前過濾已知錯誤和正常情況,使用異常檢測定義合理的閾值,超過該閾值的數(shù)據即為異常。CHEN等[27]以AIS數(shù)據、船級社數(shù)據、港口管理部門和海事安全保證部門提供的數(shù)據等數(shù)據為樣本,提出一種基于遺傳算法(GA)的知識發(fā)現(xiàn)系統(tǒng)學習正常的船舶行為,以探測異常船舶。BALDACCI等[28]開發(fā)一個AIS異常模擬器工具,用來模擬AIS的狀態(tài)、運動和位置異常,將AIS異常模擬器應用到AIS發(fā)射模型中,構建AIS隨機或確定路徑的時間序列,并通過XML文件添加路標制成輸入,進行AIS異常追蹤。GRIFFIN等[29]建立一個學習與預測系統(tǒng)LEPER,該系統(tǒng)使用軍事網格參考系統(tǒng)將船舶的軌跡分解為離散平方序列,通過HMM計算這些序列中網格位置之間的轉移概率;為檢測異常,該系統(tǒng)使用一個連續(xù)模型預測船舶的位置,并與HMM預測結果相比較。
在實際應用中,機器學習面臨著高維特征空間與樣本數(shù)不足、尋找最優(yōu)解困難和可解釋性差等挑戰(zhàn)。
3.4其他方法
ROSéN等[30]提出一種基于軌跡數(shù)據的在線異常檢測算法,針對特定的環(huán)境定義一條正常路徑,基于該路徑計算出相似位置,得到一定寬度的正常路徑,將超出該范圍定義為異常。RIVEIRO等[31]提出一種與正常船舶行為模型相匹配的異常檢測方法,建立實時的船舶正常行為模型和態(tài)勢圖,將新進數(shù)據與正常行為模型相匹配,檢測出異常行為。DRAGOS等[32]提供一種支持海事領域異常分析的新方法,通過觀測或利用復雜模型提供信息檢索策略,從指導短期糾正措施的基本事實中檢索到能幫助領域專家理解和解釋船舶異常行為的更復雜網絡范疇界定,使用通用標準語義集成各種信息源,利用信息檢索支持海上船舶異常行為的檢測、分析和解釋。
4 現(xiàn)狀分析
通過查閱相關文獻發(fā)現(xiàn),船舶異常行為分析主要存在以下3方面問題。
4.1船舶行為建模的動態(tài)性
建立船舶行為模型是異常行為檢測的基礎,而目前主要基于歷史數(shù)據進行離線式建模,沒有依據實時數(shù)據對船舶行為進行動態(tài)建模或更新。因此,船舶行為建模方式本身存在一定的缺陷。
4.2異常行為檢測的全面性
目前異常檢測的對象大多比較單一。例如,僅從軌跡、速度、加速度、航向角和密度中的某個方面或某2個方面進行檢測,缺乏綜合性。
4.3異常行為識別的情境相關性
船舶異常行為的判斷與船舶航行所處環(huán)境有很強的關聯(lián)性,依據先驗或領域知識,相同的航行運動在某些情境下是異常的,而在另一些情境下可能是正常的。因此,需將船舶運動行為置于具體的時空情境下判斷,而目前這方面的研究較少。
5 發(fā)展趨勢與挑戰(zhàn)
隨著互聯(lián)網和物聯(lián)網技術飛速發(fā)展,在安全監(jiān)管方面已初步形成由全球衛(wèi)星定位系統(tǒng)、中國船舶遠程識別與跟蹤系統(tǒng)、閉路監(jiān)控電視系統(tǒng)、無線射頻識別系統(tǒng)、AIS和VTS等組成的海事立體化監(jiān)管體系。同時,海事部門建立有完備的船舶數(shù)據庫和船員數(shù)據庫;數(shù)字航道和智能航道的建設可為感知航道提供水文、氣象及通航條件等方面的數(shù)據,從而為船舶異常行為分析提供數(shù)據基礎。這些數(shù)據不僅容量大、來源廣、類型多樣,而且彼此關聯(lián)復雜,構成航運大數(shù)據,具有大數(shù)據的4個基本特征(即數(shù)據規(guī)模大、數(shù)據種類多、數(shù)據要求處理速度快和數(shù)據價值密度低)。然而,航運大數(shù)據在帶來機遇的同時也帶來一定的挑戰(zhàn),只有采用新處理模式才能更全面、及時、準確地識別船舶異常行為。因此,可將船舶異常行為研究的發(fā)展方向和面臨的挑戰(zhàn)歸納為以下3個方面:
1) 探索面向大數(shù)據的船舶行為建模方式。船舶行為建模是異常識別的關鍵及核心,而目前的建模方式主要基于單一對象的小數(shù)據樣本,側重于根據先驗知識預先人工建立模型,依據既定模型進行行為建模。但是,航運大數(shù)據在帶來更多知識和更大價值的同時,也帶來大量的不確定性,從而導致以樣本描述整體行為出現(xiàn)偏差的可能性增大,甚至增大發(fā)生錯誤的風險或遺漏需發(fā)現(xiàn)的知識。因此,面向航運大數(shù)據,需重新考慮統(tǒng)計模型選擇、參數(shù)訓練等問題,并探索新的數(shù)據挖掘算法,動態(tài)構建船舶行為模型。
2) 結合情境分析識別船舶異常行為。船舶異常行為識別與其所處的時空環(huán)境具有強關聯(lián)性,只有綜合挖掘氣象、水文、航道拓撲結構、交通流狀況、船舶本身的靜態(tài)和動態(tài)屬性、航行規(guī)則及人員等情境因素才能有效判斷可能對船舶造成危險的異常,從而提高識別的準確度。
3) 基于新的數(shù)據處理挖掘平臺。航運大數(shù)據不僅數(shù)據量巨大,而且所蘊含的知識價值會隨著時間的流逝而逐漸衰減。異常行為識別具有極高的實時性要求,因此相應的數(shù)據分析必須快速、高效,甚至是實時處理。云計算的出現(xiàn)為航運大數(shù)據的有效利用帶來了契機,利用其分布式文件系統(tǒng)存儲船舶航行數(shù)據,利用其MapReduce并行計算方式加速船舶行為建模及異常識別,為船舶異常行為研究提供新思路和新方法。
6 結束語
船舶異常行為研究一直是海事安全科學理論的基礎問題,面對新問題研究新方法,進一步探索船舶異常行為識別的理論和技術,對保證船舶安全航行,規(guī)避風險,減少虛警,促進水路運輸暢通、平安、綠色和高效的發(fā)展均具有重要意義。
[1] 中華人民共和國交通運輸部[EB/OL].[2015-04-01].http://www.moc.govcn.
[2] 徐武雄,初秀民,劉興龍.水上交通信息可視化技術研究進展[J].中國航海,2015,38(1):34-38.
[3] 吳兆麟,朱軍.海上交通工程[M].2版.大連:大連海事大學出版社,2004.
[4] DAVENPORT M.Kinematic Behaviour Anomaly Detection (KBAD) Final Report [R].DRDC CORA Report,2008.
[5] 甄榮.基于AIS信息的港口水域船舶異常行為識別研究[D].廈門:集美大學,2015.
[6] 邱洪生.基于卡爾曼濾波的船舶航行軌跡異常行為預測算法研究[D].天津:河北工業(yè)大學,2012.
[7] 甄榮,邵哲平,潘家財,等.基于統(tǒng)計學理論的船舶軌跡異常識別[J].集美大學學報(自然科學版),2015,20(3):193-197.
[8] WAXMAN A,HU Haijun,MARTIN D.Maritime Group Motion Analysis:Representation,Learning,Recognition,and Deviation Detection[C].18th International Conference on Information Fusion.IEEE,Washington DC,2015:1015-1021.
[9] RIVEIRO M,FALKMAN G,ZIEMKE T.Improving Maritime Anomaly Detection and Situation Awareness Through Interactive Visualization[C].11th International Conference on Information Fusion.IEEE,Cologne,2008:47-54.
[10] RHODES B J,BOMBERGER N A,ZANDIPOUR M.Probabilistic Associative Learning of Vessel Motion Patterns at Multiple Spatial Scales for Maritime Situation Awareness[C].10th International Conference on Information Fusion,2007:1-8.
[11] RHODES B J,BOMBERGER N A,SEIBERT M.Maritime Situation Monitoring and Awareness Using Learning Mechanisms[C].Military Communications Conference,Atlantic City,2005:646-652.
[12] SOLEIMANI B H,SOUZA E N D,HILLIARD C,et al.Anomaly Detection in Maritime Data Based on Geometrical Analysis of Trajectories[C].18th International Conference on Information Fusion,Washington DC,2015:1100-1105.
[13] LEI P R.Exploring Trajectory Behavior Model for Anomaly Detection in Maritime Moving Objects[C].2013 IEEE International Conference on Intelligence and Security Informatics ,Seettle WA,2013:271.
[14] JEONG H,YOO Y,YI K M,et al.Two-Stage Online Inference Model for Traffic Pattern Analysis and Anomaly Detection[J].Machine Vision and Applications,2014,25(6):1501-1517.
[15] AVRAM V,GLASSER U,YAGHOUBI H Y.Anomaly Detection in Spatiotemporal Data in the Maritime Domain[C].IEEE International Conference on Intelligence and Security Informatics,Arlington VA,2012:147-149.
[16] LIU B,SOUZA E N,MATWIN S,et al.Knowledge-Based Clustering of Ship Trajectories Using Density-Based Approach[J].IEEE International Conference on Big Data,Washington DC,2014:603-608.
[17] JAKOB M,VANEK O,PECHOUCEK M.Using Agents to Improve International Maritime Transport Security[J].IEEE Intelligent Systems,2011,26(1):90-96.
[18] BALDACCI A,ROLLA S,CARTHEL C.Maritime Traffic Characterization with the Automated Identification System[R].La Spezia,Italy:NURC-FR,2009.
[19] LANER D,NEVELL D A,HAYWARD S D,et al.Maritime Anomaly Detection and Treat Assessment[C].13th Conference on Information Fusion,Edinburgh,2010:1-8.
[20] WANG Xiaoguang,LIU Xuan,MATWIN Stan.Vessel Route Anomaly Detection with Hadoop MapReduce[C].IEEE International Conference on Big Data,Washington DC,2014:25-30.
[21] SNIDARO L,VISENTINI I,BRYAN K,et al.Markov Logic Networks for Context Integration and Situation Assessment in Maritime Domain[C].15th International Conference on Information Fusion,Singapore,2012:1534-1539.
[22] KOWALSKA K,PEEL L.Maritime Anomaly Detection using Gaussian Process Active Learning[C].15th International Conference on Information Fusion,Singapore,2012:1164-1171.
[23] OKTARINA D,HANDAYANI D,SEDIONO W,et al.Anomaly Detection in Vessel Tracking Using Support Vector Machines[C].International Conference on Advanced Computer Science Applications and Technologies,2013:213-217.
[24] TAN Xiaobin,XI Hongsheng.Hidden SemiMarkov Model for Anomaly Detection[J].Applied Mathematics and Computation,2008,205(2):562-567.
[25] MASCARO S,NICHOLSOB A E,KORB K B.Anomaly Detection in Vessel Tracks Using Bayesian Networks[J].International Journal of Approximate Reasoning,2014,55(1):84-98.
[26] LUO Na,YUAN Fuyu,ZUO Wanli,et al.Improved Unsupervised Anomaly Detection Algorithm[C].Third International Conference RSKT 2008,Chengdu,2008:532-539.
[27] CHEN C H,KHOO L P,CHONG Y T.Knowledge Discovery Using Genetic Algorithm for Maritime Situational Awareness[J].Expert System with Applications,2014,41(6):2742-2753.
[28] BALDACCI A.Automated Identification System Anomaly Simulator[R].La Spezia,Italy:NURC-MR,2008.
[29] GRIFFIN C.Learning and Prediction for Enhanced Readiness:An ONR Office 31 Program[R].Presentation to TTCP MAR AG-8,2009.
[30] ROSéN O,MEDVEDEV A.An Online Algorithm For Anomaly Detection in Trajectory Data[C].American Control Conference,Montreal,2012:1117-1122.
[31] RIVEIRO M,FALKMAN G.Supporting the Analytical Reasoning Process in Maritime Anomaly Detection:Evaluation and Experimental Design[C].14th International Conference Information Visualisation,London,2010:170-178.
[32] DRAGOS V.From Finding to Explaining:Information Retrieval to Support Maritime Anomaly Analysis[J].International Journal of Knowledge and Systems Science,2016,7(1):40-56.
StatusandResearchTrendsonAbnormalShipBehavior
GAOShu1a,1b,LIUTiantian1a,CHUXiumin1c,CHENLiangchen1a,2,CAOXiufeng1a
(1a.School of Computer Science and Technology; 1b.Hubei Key Laboratory of Transportation Internet of Things; 1c.Intelligent Transport System Research Center,Wuhan University of Technology Wuhan 430063,China; 2.Department of Computer Application,Institute of Industrial Relations China,Beijing 100048,China)
How to detect abnormal ship behavior is an interesting issue.The current status and research trends on abnormal ship behavior are reviewed.Ship behavior and its anomaly identification is introduced,and the abnormal behavior classification and identification process are explained.The detection method of the abnormal ship behavior is classified,and existing problems are presented.Future development direction and advice in related areas are summarized.
waterway transportation; abnormal ship behavior; AIS data; big data; cloud computing
U675.7;TP391
A
2017-02-24
國家自然科學基金(51479155);中央高校基本業(yè)務費專項資金(16ZY006);湖北省自然科學基金(2014CFB190)
高 曙(1967—),女,安徽蕪湖人,教授,博士生導師,從事水上交通信息化技術研究。E-mail:gshu418@163.com
初秀民(1969—),男,吉林集安人,研究員,博士生導師,從事水路交通智能化技術研究。E-mail:chuxm@whut.edu.cn
1000-4653(2017)02-0038-06
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
海峽科技與產業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
