基于3D激光雷達道路邊緣實時檢測算法的研究與實現
2017-11-01 17:14:42李強杜煜
計算機應用與軟件 2017年10期
李 強 杜 煜
(北京聯合大學信息學院 北京 100101)
基于3D激光雷達道路邊緣實時檢測算法的研究與實現
李 強 杜 煜*
(北京聯合大學信息學院 北京 100101)
針對自然環境下無人駕駛車輛的道路邊緣檢測問題,提出一種基于3D激光雷達的實時道路邊緣檢測算法。對激光雷達的點云數據進行網格化處理,求出每個網格中的高度差,并針對道路邊緣的高度特征,對網格數據進行閾值處理;再由近及遠逐個提取左右道路邊緣,利用最小二乘法對左右道路邊緣網格進行曲線擬合平滑處理,得到左右道路邊緣。實驗結果表明,該道路邊緣檢測算法可靠性高,穩定性強,能夠準確完成道路邊緣檢測,滿足實時系統的要求。
無人駕駛 激光雷達 道路邊緣 最小二乘法
0 引 言
環境感知是無人駕駛車(Unmanned ground vehicle)的重要研究內容[1-3],通過感知無人車所處環境的各種交通元素和障礙物信息,實現車輛的決策與控制。道路邊緣檢測是環境感知研究領域中的重要組成部分,道路邊緣的確定為無人駕駛車隔離了可行駛道路區域和其他周邊非可行駛道路區域。所以針對道路邊緣檢測算法的研究越來越受重視,但大部分的檢測算法是基于視覺傳感器[4-8]。由于視覺傳感器的檢測效果易受光照條件變化的影響,同時道路的復雜性也會影響視覺傳感器的檢測效果,例如道路邊緣的多樣性、道路邊緣附近水跡、裂縫等,都會影響視覺傳感器檢測算法的穩定性。
激光雷達是一種高精度主動式環境探測傳感器,在其有效探測范圍內能夠精確地探測環境中的物體位置信息。在可行駛道路和非可行駛道路之間會有明顯的隔離區域,例如柵欄、墻體、花草、樹木等,都可以作為道路邊緣信息。因此,不少研究人員利用激光雷達的高精度和環境干擾性小的特點,對道路邊緣特征進行提取,但是這些研究都是基于理論研究或者在理想道路上的直線道路邊緣提取[9-10],或者是提取的道路邊緣難以滿足無人車的實時性要求[11-14]。本文提出的方法是在實際環境中采集的道路邊緣,并在實際的無人車測試中取得較好的效果。
1 道路邊緣提取
1.1 激光雷達
本文采用美國Velodyne公司HDL-64E激光雷達。假設建立一個球面坐標系以激光雷達為原點,激光雷達光束的俯仰角為球面坐標的仰角,激光雷達的旋轉方向確定球面坐標的方位角。HDL-64E會產生64條激光線,每條光束都能夠返回物體的距離信息r,而且每條光線的俯仰角θ是一個定值,激光雷達發射的光束打在物體表面的水平旋轉角α可根據雷達的頻率返回。根據球面坐標系,每個在探測范圍內的物體的球面坐標都可以求出來,然后根據球坐標(r,θ,α)與直角坐標(x,y,z)之間的轉換關系,可獲得物體的直角坐標系。
1.2 道路模型
為了確保算法的通用性,本文選取了一段如圖1所示的道路模型,而直線道路屬于曲線道路的特殊情況。
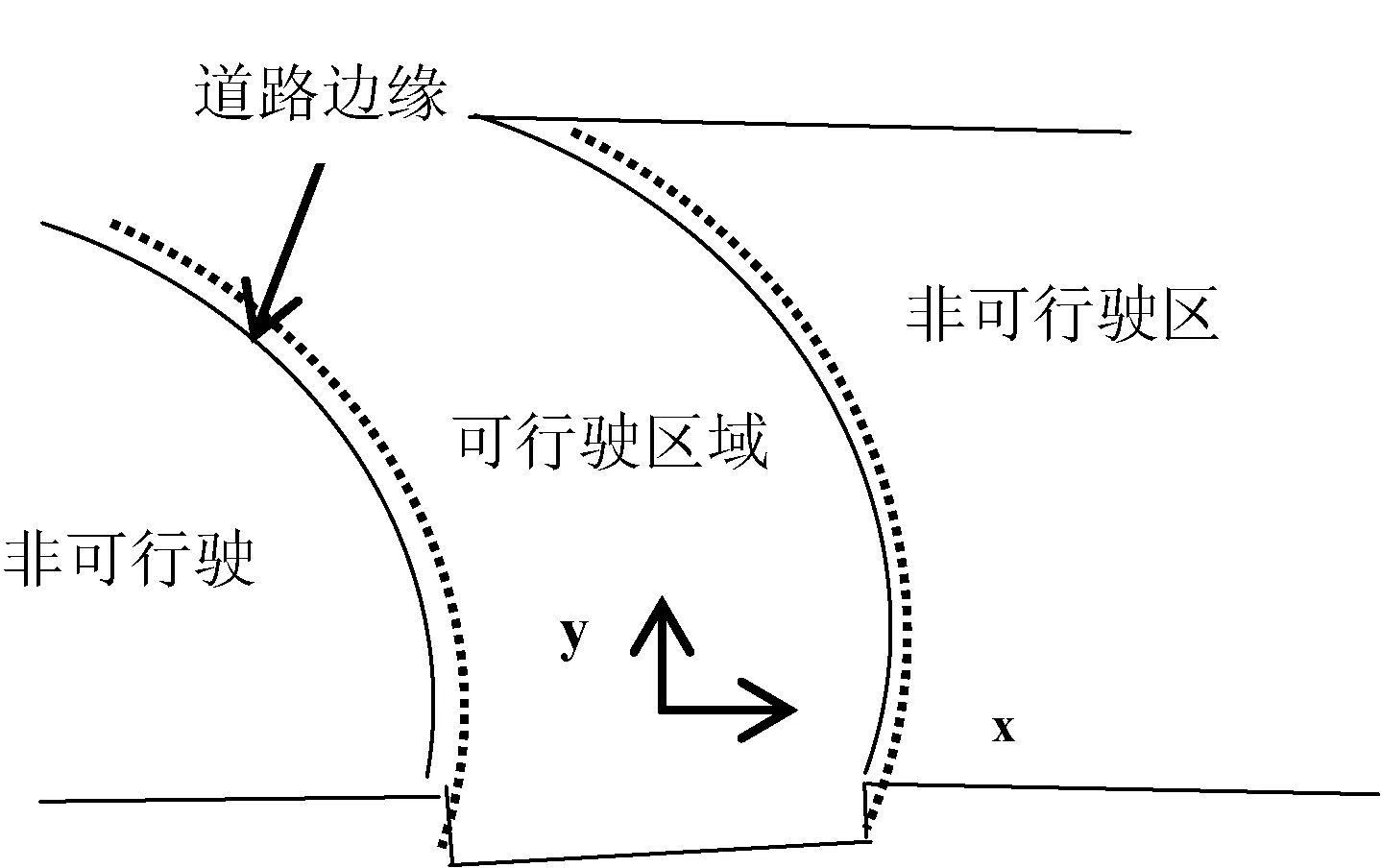
圖1 道路模型圖
1.3 提取激光雷達原始數據
從激光雷達獲取原始數據為(r,θ,α),根據需要將球面坐標轉換為直角坐標(x,y,z),轉換關系如下:
x=r×sin(θ)×cos(α)
(1)
y=r×sin(θ)×sin(α)
(2)
z=r×cos(θ)
(3)
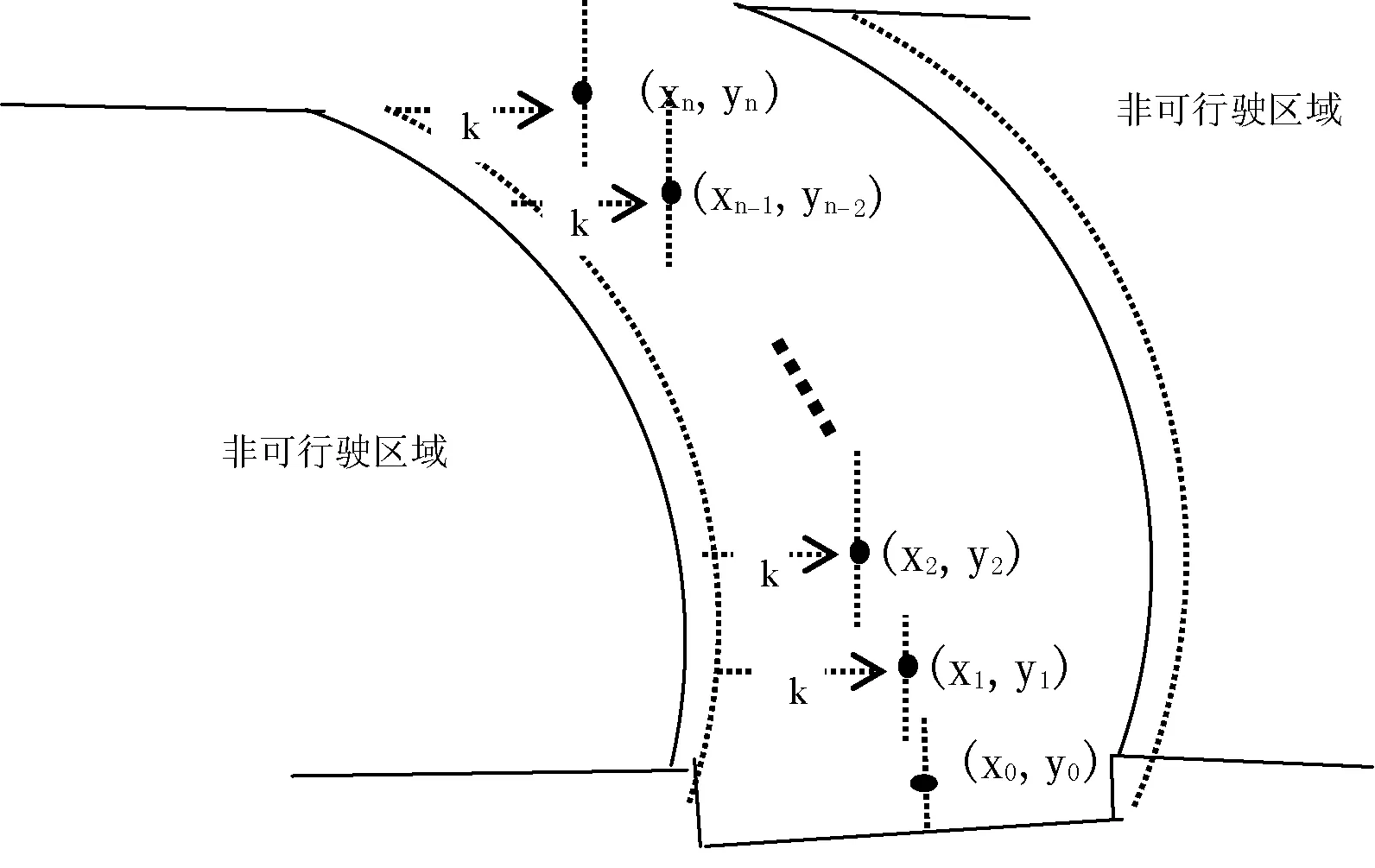
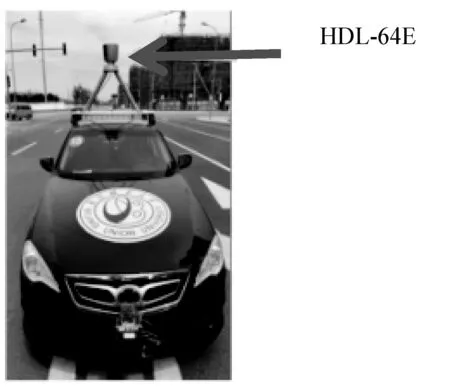
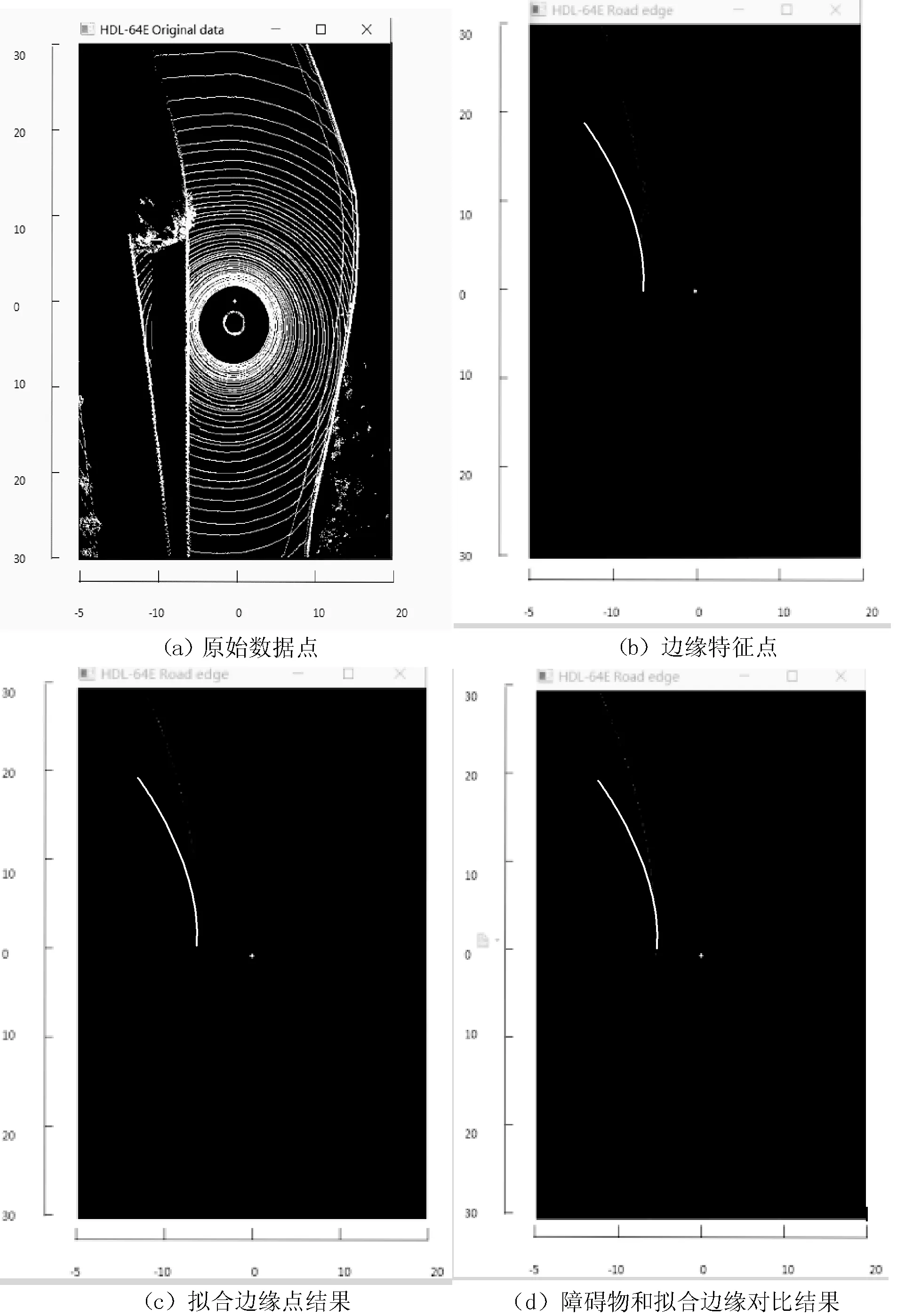
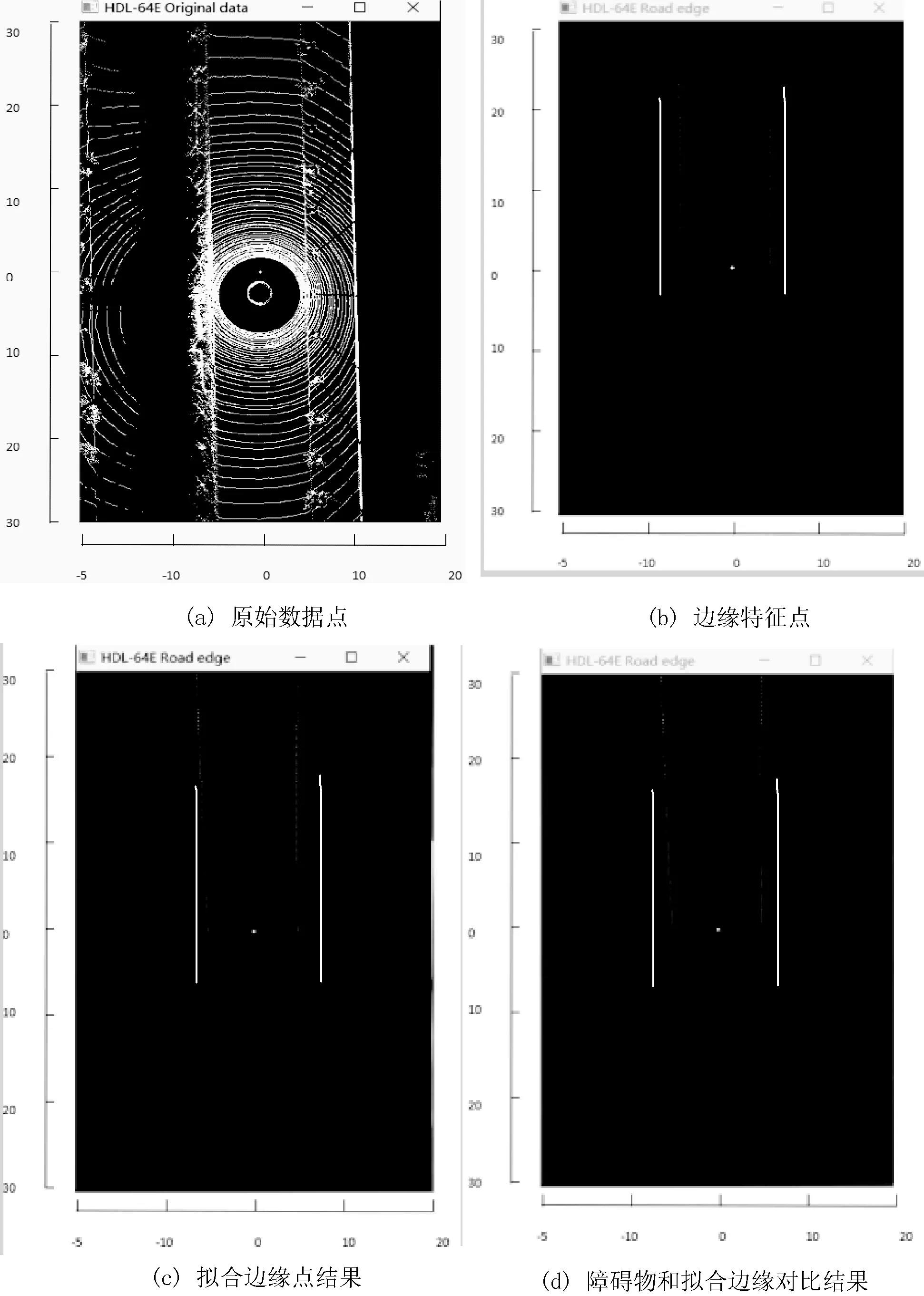
為了提高算法的效率,對原始數據進行感興趣區域提取。本文限定感興趣區域為車前50米,左右限定各10米,即0 m 障礙物都有一定的高度差,表現在原始數據中即為在xoy平面的一定區域內,z的數據會有較大的變化。根據這個特點對原始數據進行平面化處理,即將數據垂直投影到xoy平面,對該平面的原始數據進行20 cm×20 cm的網格化處理。以落在同一個網格的數據點作為一個處理單位,比較同一個網格內的所有數據點,找出其中最大Zmax和最小Zmin的數據點。這樣每個網格都有一個高度屬性Z=Zmax-Zmin。一般可行駛區域和非行駛區域都有一定的高度差,所以道路邊緣的網格高度屬性都會大于一定的值。設定道路邊緣大于20 cm,這樣可以對獲取的數據進行Z方向的閾值濾波,減小了道路旁邊低矮石子、小雜草等影響。 激光雷達每一幀數據都會返回周邊環境的障礙物分布情況,所以只需要對每一幀數據進行數據提取即可,即激光雷達實時的掃描障礙物,算法則實時對道路邊緣進行提取。假設無人駕駛車輛在道路中間,如果簡單對x軸做一個正負方向的取值,然后判定它是左邊道路邊緣還是右邊道路邊緣,會誤將左邊道路邊緣數據劃分到右邊道路邊緣,也可能會將右邊道路邊緣數據劃分到左側道路邊緣。因為在曲線道路情況下,兩側道路邊緣都有可能同時出現x軸方向的數據為正和負的情況。所以需要針對曲線道路邊緣進行合理的邊緣點提取。 現在以提取左側道路邊緣為例進行說明,如圖2所示。首先以車頭(x0,y0)為起點,搜索起點前方一個網格(x0,y0+1)在x軸上左側的最近點(x1,y1)。如果沒有找到最近點,則繼續在下一個網格(x0,y0+2)上面尋找左側最近點,如果還沒有找到,繼續上一步操作。因為道路邊緣一定存在,所以必然會找到最近點(x1,y1),將該點在x軸上平移k,其中k>0,得到點(x1-k,y1)。然后將起點改為(x1-k,y1),繼續重復上一步驟,以此類推,將獲取一系列點:(x1-k,y1),(x2-k,y2),(x3-k,y3),…,(xn-k,yn)。對這些點x軸上進行加k操作,即獲得道路邊緣特征點的數據點: (x1,y1),(x2,y2),(x3,y3),…,(xn,yn) (4) 圖2 提取邊緣特征點圖 最小二乘法通過最小化誤差的平方和尋找數據的最佳函數匹配,是一種常用的曲線擬合方法。假定待擬合數據點為(xi,yi),在確定的函數類Φ中,求p(x)Φ,使ri=p(xi)-yi(i=0,1,…,m)的平方和最小,即: (5) 在曲線擬合的過程中Φ可有不同的選取方法,根據給定的道路邊緣模型,選取二次函數作為最佳擬合曲線。如果道路比較曲折,可以選取三次函數或更高次函數作為最佳擬合曲線,在這里以一般性道路邊緣模型來闡述方法。假設二次最佳擬合曲線為: (6) 用矩陣表示最小二乘法的關系為: (7) 其中(xi,yi)為上述求得的曲線道路邊緣特征點,m為特征點數據個數,a、b、c為曲線函數待解系數。可以證明,式(7)中的三階矩陣為對稱正定矩陣,故存在唯一解,即可以解出a、b、c。當a=0時,即為直線道路邊緣的情況。 實驗無人車平臺如圖3所示,本測試無人車型號為北汽C70。兩次代表北京聯合大學參加“智能車未來挑戰賽”,在2014年參賽時獲得綜合成績排名第三。HDL-64E在無人駕駛車輛上的安裝如圖3所示,激光雷達安裝距離車頭2.67 m處,并且雷達要求處于水平狀態。本文選取直角坐標系對數據進行處理,其中原點o為激光雷達的位置,y軸為車向前行駛方向,x軸為平行于地面,方向為從駕駛位到副駕駛位。z為垂直于地面向上的方向。 圖3 實驗平臺 實驗場景一如圖4所示。該場景為一段曲率較大、邊緣平滑的道路,部分道路邊緣被遮擋。由于之前對數據進行了感興趣區域提取,該場景下的右側道路邊緣距離自身車道較遠,所以不予考慮。 圖4 實驗場景一 實驗場景一的激光雷達點云數據如圖5(a)所示,圖中白點為實驗車車頭位置。對點云數據提取邊緣特征點,如(b)所示。用最小二乘法對點云數據進行擬合如(c)所示。擬合效果和障礙物分布圖如(d)所示。該場景下的右側道路邊緣在本文提取的感興趣區域之外,所以不予考慮。可以看出提取的馬路邊緣和實際馬路邊緣是相符合的。 圖5 實驗情況一(單位:米) 實驗二選取的場景如圖6所示,該場景為一段近似直線路段,該路段馬路邊緣旁有樹木和花草。 圖6 實驗場景二 實驗場景二的激光雷達點云數據如圖7(a)所示,圖中白點為試驗車車頭位置。對點云數據提取邊緣特征點,如(b)所示。用最小二乘法對點云數據進行擬合如(c)所示。擬合效果圖和障礙物分布圖如(d)所示。左右邊緣都在感興趣區域內,所以左右邊緣都在無人車的感知范圍內,提取到的馬路邊緣也與實際情況相符。 圖7 實驗情況二 文中通過馬路邊緣的特征,提出了一種基于激光雷達的馬路邊緣提取擬合的方法。首先對激光雷達掃描區域進行感興趣區域提取,然后利用障礙物和地面有一定高度差的特點,提取感興趣區域內的障礙物。針對提取到的障礙物分布情況,利用本文方法提取馬路邊緣特征點,最后對特征點進行擬合處理。通過上述兩個實驗結果顯示,在馬路邊緣為有規律的曲線,并且沒有被大面積遮擋的情況下,本文方法可以很好地對馬路邊緣進行檢測。 [1] 黃武陵.無人駕駛汽車帶來的交通便利[J].單片機與嵌入式系統應用,2016,16(6):6-8. [2] 馮學強,張良旭,劉志宗.無人駕駛汽車的發展綜述[J].山東工業技術,2015(5):51-51. [3] 王俊.無人駕駛車輛環境感知系統關鍵技術研究[D].中國科學技術大學,2016. [4] Bar-Shalom Y,Li X R,Kirubarajan T.Estimation with Applications to Tacking and Navigation[M]//Theory,Algorithms,and Software.Wiley,New York,2001. [5] Nationnal Semiconductor Corporation.RSDS “Intra-Panel” Interface Specification[Z].2003. [6] Zhang W,Sadekar V.Road-edge detection:US,US 8099213 B2[P].2012. [7] Wang H,Gong Y,Hou Y,et al.Road Detection Based on Image Boundary Prior[M]//Image and Graphics.Springer International Publishing,2015:212-222. [8] Chow J.Versatile RSDS-LVDS-miniLVDS-BLVDS differential signal interface circuit:US,US6836149[P].2004. [9] Yu C H.Road Curbs Detection Based on Laser Radar[J].Chinese Jorunal of Electon Devices,2008,31(3):757-762. [10] Han J Y,Kim D C,Minchae L,et al.Enhanced road boundary and obstale detection using a downward-looking lidar sensor[J].IEEE Transactions on Vehicular Technology,2012,61(3):971-985. [11] Duan J,Valentyna A.Road edge detection based on LIDAR laser[C]//International Conference on Control,Automation and Information Sciences.IEEE,2015. [12] Wang X,Cai Y,Shi T.Road edge detection based on improved RANSAC and 2D LIDAR Data[C]//International Conference on Control,Automation and Information Sciences.IEEE,2015. [13] Drage T,Churack T,Braunl T.LIDAR Road Edge Detection by Heuristic Evaluation of Many Linear Regressions[C]//IEEE,International Conference on Intelligent Transportation Systems.IEEE,2015. [14] Jaafari I E,Ansari M E,Koutti L.Fast edge-based stereo matching approach for road applications[J].Signal Image & Video Processing,2017,11(2):267-274. RESEARCHANDIMPLEMENTATIONOFREAL-TIMEROADEDGEDETECTIONALGORITHMBASEDON3DLIDAR Li Qiang Du Yu* (InstituteofInformation,BeijingUnionUniversity,Beijing100101,China) Aiming at the road edge detection problem of unmanned vehicle in natural environment, this paper proposes a real-time road edge detection algorithm based on 3D lidar. The point cloud data of lidar are meshed to get the height difference of each grid, and the threshold is processed according to the height characteristic of the road edge. Then one by one from the near to the far to extract the left and right road edge, and we use the least square method to curve fitting the left and right road edge mesh, and get the right and left edge of the road. The experimental results show that the algorithm has high reliability and stability, and can finish the road edge detection accurately. It can meet the requirements of real-time system. Unmanned driving Lidar Road edge Least square method TP3 A 10.3969/j.issn.1000-386x.2017.10.038 2016-12-06。國家自然科學基金重大研究計劃項目(91420202)。李強,碩士,主研領域:基于激光雷達的路徑規劃算法,基于激光雷達的slam研究。杜煜,教授。1.4 網格化原始數據
1.5 提取障礙物邊緣點
1.6 曲線擬合道路邊緣
2 實驗平臺
3 實驗結果與分析
3.1 實驗一

3.2 實驗二

4 結 語
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
