基于CAD的汽車側窗玻璃面與導軌導線的設計研究
2017-11-01 17:08:30胡廣新王亮
汽車科技 2017年5期
胡廣新+王亮


摘 要:提出了一種基于CAD的汽車側窗雙曲率玻璃面與導軌導線的擬合方法。該方法利用螺旋線的旋轉和運動特性,并結合CATIA的二次開發工具,具有高效,精準等特性。在實際項目中,實現了擬合出的玻璃面與造型偏差控制在0.05mm,基于擬合的玻璃面做出的玻璃能夠實現在玻璃面上的無偏差運動。說明該方法及開發出的工具設計合理,精準、高效。
關鍵詞:車門玻璃;導軌導線;雙曲率玻璃面;擬合 CATIA二次開發
中圖分類號:U462.1 文獻標識碼:A 文章編號:1005-2550(2017)05-0008-04
Design and Research of Automotive Door Glass Surface and Guide Rail Based on CAD
HU Guang-xin, WANG Liang
( FAW-Volkswagen Automobile co.Ltd, Changchun130011, China )
Abstract: A method of fitting the double-curvature glass surface and guide rail of automobile side window based on CAD is proposed. The method uses the helix rotation and motion characteristics, combined with CATIA secondary development tools, with high efficiency, precision and other characteristics. In the actual project, the glass surface and the design deviation are controlled at 0.05mm, and the glass based on the fitted glass surface can realize the unbiased movement on the glass surface. Indicating that the method and the development of the tool design is reasonable, accurate and efficient.
Key Words: Automotive Door Glass; Guid Rail; Double-curvature Glass Surface; Fitting CATIA Secondary Development
1 前言
汽車側窗玻璃面是汽車車門開發的基礎,也是汽車造型和車身設計的難點。筆者所在公司的汽車車身造型設計越來越強調流線型,因此,車門玻璃均采用雙曲率的玻璃面。所謂雙曲率玻璃面,是指在升降方向和車身長度2個方向上,玻璃面的曲率都大于零。采用雙曲率玻璃面的車窗玻璃的升降運動是上下沿某軸轉動和側向滑移運動的合成,這種復雜的復合運動對玻璃曲面和導軌導線的設計提出了很高的要求。如果設計不合理,將導致玻璃在運動的過程中與玻璃面產生較大的偏差,而導致玻璃升降困難甚至卡死。
近年來,汽車廠商對于雙曲率玻璃面已經得到了較廣泛的應用,部門學術界也對不同形式的雙曲率玻璃面做了一定的研究。如高云凱等[1] 和雷雨成等[2]采用圓環面來擬合雙曲率玻璃面,但筆者在實際車型開發的過程中,發現使用該方法所擬合出的玻璃運動偏差較大,約在3mm左右。后來,同濟大學的高大威[3]和廣汽長豐研發中心的李傳經[4]提出了基于鼓形面的車門玻璃,并基于鼓形線原理設計了玻璃導軌。筆者在實際的車型開發應用中,發現該方法擬合出的玻璃面雖然與造型的流線型匹配度較好,但受限于玻璃面本身運動特性和旋轉軸的選取,玻璃的運動偏差也基本上都在0.6mm左右。無論是圓環面還是鼓形面來擬合玻璃面,在實際的車型開發中,均存在如下的問題:
1.受圓環面和鼓形面幾何本身特征因素的影響,雖然玻璃下降的過程中,有下降方向和車身方向兩個運動,但該2個運動不能完全補償,從而導致較大偏差;
2.無論是圓環面還是鼓形面,均只能先擬合出玻璃面,再根據玻璃面擬合導軌導線,2次擬合的誤差疊加,從而導致較大偏差。
筆者結合所在公司的某一款車型,對側面玻璃進行了雙曲率玻璃面和玻璃引導線的同時擬合。并結合CATIA的二次開發工具,使用迭代算法,實現對擬合玻璃面和導軌導線的偏差控制。通過運動分析,擬合出的玻璃面與原玻璃面最大偏差小于0.05mm,基于擬合的玻璃面做出的玻璃能夠實現在玻璃面上的無偏差運動。說明該方法及開發出的工具設計合理,準確。
2 設計理論
由于雙曲率汽車側窗玻璃半徑,從后視圖看,在B柱附近半徑最大,且往車身前后方向逐步減小。以前門為例,側窗玻璃的前后邊界的半徑不同,后邊界較大,前邊界稍小,且由于B柱造型原因,導致前后邊界線從側面看是后傾的。而玻璃的邊界則決定了玻璃的運動軌跡和升降器導軌的形狀,因此,玻璃邊界的定義,也是導軌導線定義的基礎。為保證玻璃升降過程中的平順,在理論上,就要求玻璃能嚴格沿著2個邊界運動,即玻璃在上下升降的過程中,盡量減少車身前后方向與邊界的偏離,和在車身左右方向與玻璃面的偏離。
為達到上述設計目標,通常將玻璃的升降運動擬合成沿某一軸線的旋轉運動和沿該軸線方向上的偏移運動的組合。而玻璃面在此前的學術研究中,也經常被擬合成如下的幾種形式:
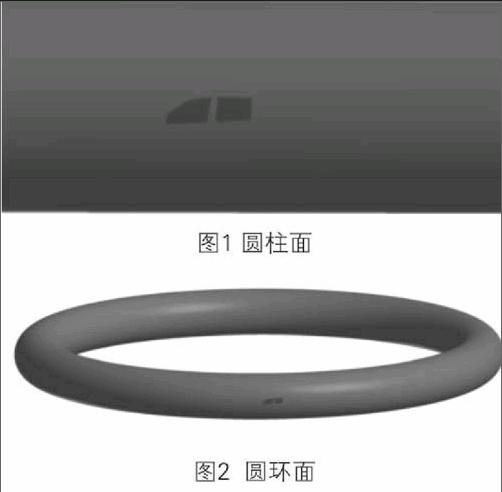
A.圓柱面(見圖1):玻璃的升降可以上下運動和旋轉運動,但玻璃的前后邊界半徑必須相等,是單曲率玻璃面,由于與現代造型偏差較大,因此,現在轎車廠商幾乎不再使用;endprint
B.圓環面(見圖2):將圓柱面以一定的半徑R彎曲為一個圓環,圓環的表面即為圓環玻璃面。圓環面擬合法是將圓環上截取的玻璃部分近似當成圓柱。此種擬合方法僅適用于玻璃前后邊界的半徑偏差非常小,也就是R足夠大,圓柱的半徑r遠小于R的情況;
C.鼓形面(見圖3):一條半徑為R的圓弧曲線或低階的NURBS(Non-Uniform Rational B-Splines )曲線繞著一旋轉軸旋轉所得到曲面即為鼓形面。基于鼓形面的側窗玻璃的前后邊界半徑不同,鼓形面滿足現代造型從B柱往車身前后收斂的風格,也是目前汽車廠商普遍使用的玻璃面的擬合方法。但從幾位學者的論文 [3~5] 和筆者的實際工作項目應用上,基于鼓形面的玻璃運動,在車身的前后方向和左右方向均會存在一定的偏差。雖然這種偏差,不至于讓玻璃產生卡死的現象,也在大部分主機廠商能夠接受的范圍內。但是一定的偏差勢必會增加玻璃和導槽的摩擦,增加噪聲和減少升降系統和導槽的壽命。
玻璃的升降運動只有做到了如下要求,才能保證玻璃的升降運動和玻璃面無偏差:一是玻璃上的所有點均沿著一個軸做旋轉運動;其次,當旋轉角度一致時,玻璃上的每一個點沿著該軸線方向所偏移的距離均相等。同時受限于造型特征,如前門玻璃的邊界線前后平行且后傾,而后門玻璃的邊界線前后平行且前傾,并且玻璃的前后邊界半徑不同。為此,提出了一種雙曲率弧形桶狀玻璃面,如圖4所示。該玻璃面的前后邊界是螺距相等的螺旋線,母線是符合造型特征的一圓弧,玻璃面是該圓弧通過前后邊界掃略形成的曲面。
玻璃的前后邊界是2條螺距相等,半徑不等的螺旋線。每一條螺旋線都是一個圓柱螺旋線,且這兩條螺旋線的旋轉軸相同。玻璃的前后邊界展開后為2條平行的直線,在沿旋轉軸的方向的投影,為2個圓心相同,半徑不同的2個圓弧。
如圖5所示,根據螺旋線的特性,設玻璃旋轉角度為β時,沿旋轉軸移動的距離A,可知:
從而可以推導出,螺距的方程為:
3 擬合設計方法
按照理論分析,以某車型的前門側窗玻璃為例,其中已知的條件為:a. 車身造型數據b. 根據造型B柱蓋板和三角區蓋板初步定義的車門玻璃的前后邊界位置c.根據造型的側圍K線和窗臺位置初步定義的玻璃上下邊界位置,如圖6所示:
分析造型的玻璃邊界線,從后視圖來看,玻璃的前后邊界似為2條半徑不同的曲線,如圖7所示:
從俯視圖來看,玻璃曲面為一條曲線,如圖8所示。可見造型所使用的玻璃為雙曲率玻璃面。
根據螺旋線的原理,只要能擬合出一個直線作為旋轉軸,且此軸要盡可能滿足:前邊界上所有點,距離該軸的距離相等,和后邊界上所有點,距離該軸的距離相等。可將擬合條件分解為造型前邊界的上下端點距離該軸的距離相等,和后邊界的上下端點距離該軸的距離相等,并且前后邊界均為螺旋曲線。如圖9中所示,其中L1=L2,L3=L4。
根據以上理論和方法,設置擬合的允許誤差為0.05mm。具體擬合方法為:①過玻璃的前后邊界,擬合2個圓,并過2圓的圓心做一直線1 ②分別過玻璃前后邊界的2 個下端點,并和直線1垂直做2個面(平面1,平面2),將2個圓分別投影到這2個平面上;③分別在前后投影線,靠近玻璃邊界上、中、下處各選3個點,再做2個圓。并過這2個圓心再做一條直線2;④將玻璃后邊界上下短點分別投影到直線2上,并分別相連得到2條直線,測量這兩條直線的長度L3和L4;⑤量取L3和L4的長度,判斷長度差是否在誤差允許范圍內,若不在,則返回第③步,重新調整選取點的位置。直至L3和L4的長度差在允許誤差范圍內;⑥測量L3和L4的距離和角度,并根據公式計算出螺旋線的螺距大小;⑦根據Catia的螺旋線命令,輸入上步計算出的螺距值,選擇起始點為前后邊界的下斷點,螺旋軸為第3步做出的直線,分別作出前后2條螺旋線。這兩條螺旋線即為玻璃的前后邊界線,也是玻璃導軌導線的基礎線。⑧過螺旋線旋轉軸和靠近造型玻璃中間位置的任一點做一平面,并求該平面與玻璃面的交線,并將交線擬合成一個圓,取靠近玻璃的一段。將該圓作為截面線,前后螺旋線作為引導線,重新掃略出一個曲面,該曲面即為重新擬合的玻璃面;⑨檢查新掃略的玻璃面與原造型玻璃面的偏差,應將其控制在允許的誤差范圍內。若超過此范圍,則需要調整上步中選取的點的位置,重新擬合成。
對新的玻璃面進行裁剪,并增加料厚即可得出玻璃的數據。裁剪的前后邊界使用擬合出的螺旋邊界線,上邊界使用和原造型玻璃的邊界在新玻璃面上的投影,而下邊界則根據車門內壓條的密封性和防水要求,結合玻璃的可制造性等,后門還要考慮升降器的重心位置等要求進行設計。同時,根據玻璃下降到最低位置不能漏出窗臺等要求,設計玻璃引導線的長度。至此,整個玻璃的擬合和引導線設計完成。
4 基于CAD的擬合設計
玻璃面的擬合是帶有一定偏差的擬合,筆者所提到的這種方法,很大程度上已經非常貼近造型可以控制偏差在0.05mm以內。但如果手動操控,也需要一定程度的反復調整,且手動判斷容易出錯。因此,提出了基于CAD二次開發技術的擬合方法。
CATIA接口通過兩種方式與外部程序通信:進程內應用程序(In Process Application)方式和進程外應用程序(Out Process Application)方式[6]。對CATIA進行二次開發一共有四種方式:Automation API,Knowledge Ware,Interactive User Defined Feature和 CAA V5 C++ And Java API。
編寫自動化應用接口(Automation API)的宏使用的腳本語言是可視化程序設計語言應用(Visual Basic for Application,VBA),該腳本幾乎提供了所有Visual Basic語言及圖形的界面功能。VBA本身有一個完整的集成開發環境(Integrated Development Environment,IDE),有方便的代碼提示、語法高亮顯示及強大的調試功能,因而手工編寫代碼很方便。因此,本文采用自動化應用接口(Automation API)的方法,基于Visual Basic語言所編制的智能化操作系統。整個系統的輸入條件為本文第2部分所提到的已知條件,同時設置允許的偏差大小為 0. 05mm。初始界面如圖11所示:endprint
點擊開始,系統會根據第2步中提到的擬合方法運算,其中,關鍵的算法是第③步中圓的擬合上,采用的是基于CATIA的三點做圓命令,不斷將三個點以0.05mm的間隔進行調整,利用VB的For/ Next循環,直至誤差在允許的范圍內,具體算法如圖12所示:
循環結束后,當擬合的新玻璃面與原造型玻璃面在允許的誤差范圍內,退出循環并彈出結果對話框,如圖13所示。利用CATIA的偏差分析命令,結果如圖14所示,可以看到,該系統得出的結果和CATIA的偏差結果一致,本例中最大偏差均為0.0434mm,在允許的范圍內。
5 運動分析驗證
擬合出的雙曲率弧形桶狀玻璃面、導軌導線和裁剪后的玻璃,為后續的在車型開發流程中的表面光順和結構設計提供基礎。將裁剪后的玻璃,沿著導軌導線下降運動,并在運動過程中分別選取導線長度的10等分處測量下降后的玻璃與新擬合的玻璃面和導軌導線的偏差,從偏差分析的結果來看,無論是與玻璃面左右方向的偏差,還是與導軌的前后方向的偏差均為零,如圖15所示:
6 結 論
利用本文介紹的方法,不僅能夠保證現代造型的車身設計雙曲率的要求,利用CAD的二次開發技術,使擬合的玻璃面與原造型控制在0.05mm以內,同時保證了高精度和高效率。將玻璃面和玻璃導軌同時擬合,消除了玻璃下降過程中的偏差,更好地提高了高精度的開發,減少因偏差而引起的玻璃升降中的摩擦和噪聲,延長周邊零件的使用壽命,符合高精度的開發要求,為中國汽車行業的高精準開發奠定基礎。
參考文獻:
[1]高云凱, 趙懿, 彭和東.環面玻璃轎車車門設計方法研究[J].汽車工程, 2005, 27(4): 483-485.
[2]雷雨成, 張平, 陳壽昌, 等.雙曲率車門玻璃的圓環面擬合法[J].汽車工程, 2005, 27(5):623.
[3]高大威, 高云凱, 周曉燕, 劉海立. 基于鼓形面的車門玻璃及導軌設計[J]. 同濟大學學報(自然科學版), 2012,1(40): 92-96.
[4]李傳經. 腰鼓形雙曲率車門玻璃升降系統設計 .北京汽車.2011. No.6. 16-17.
[5]王金松. 車門玻璃面的運動軌跡確定及升降器布置.南方農機-車輛與動力工程. 2015.12. P43.
[6]李自勝, 朱瑩, 向中凡. 基于CATIA軟件的二次開發技術. 四川工業學院學報.2003.22(1) P.16-18.endprint
