基于Maxwell和Simplorer輪轂式SRD分析與研究
2017-11-02 04:44:34姜保軍周林黃大飛
重慶交通大學學報(自然科學版) 2017年10期
姜保軍,周林,黃大飛
(1.重慶交通大學 機電與汽車工程學院,重慶 400074;2.中國汽車工程研究院,重慶 401122)
基于Maxwell和Simplorer輪轂式SRD分析與研究
姜保軍1,周林1,黃大飛2
(1.重慶交通大學 機電與汽車工程學院,重慶 400074;2.中國汽車工程研究院,重慶 401122)
由于輪轂式開關磁阻電機的結構特性,使得其電磁關系十分復雜,單獨的電機本體建模仿真不能較為準確地模擬其實際運行工況。在Maxwell環境下建立輪轂式開關磁阻電機的有限元模型,聯合Simplorer軟件,搭建功率變換器和控制電路,進行“場-路”的耦合計算,對電機的啟動、穩定運行兩工況進行仿真分析,得到其運行特性。聯合仿真結果比較準確地反映了電機的實際運行情況,為輪轂式開關磁阻電機調速系統的控制和優化提供了參考。
車輛工程;開關磁阻電機;Maxwell;Simplorer;角度位置控制;電流斬波控制
0引言
輪轂式驅動作為電動汽車一種新興的驅動形式,是未來新能源汽車的重要發展方向。由于這種結構省去了復雜的機械傳動裝置,使整車設計更加靈活,能量利用率更高,優點顯而易見[1]。開關磁阻電機(SRM或SR電機)不但結構簡單、成本較低、可靠性高、適用于高速運行,而且有卓越的啟動、制動特性[2],因此SRM作為電動汽車的驅動電機具有重要應用價值。但由于SRM的雙凸極結構,工作時磁路容易飽和,磁化曲線呈非線性特性,難以建立精確的數學模型,系統控制中也就無法得到較為精確的反饋量。在研究其運行特性的方法中,有限元法對比傳統的解析法和等效磁路法更適合解決非線性這類問題。Maxwell軟件能很好的利用有限元法計算電機本體的電磁特性。但單獨在Maxwell環境下仿真,只是電場的計算,其忽略了較多因素,本質上誤差較大。Simplorer軟件依靠磁路法來獲得電機的特性,是路的計算。Maxwell和Simplorer的聯合仿真是“場-路”的耦合計算,更為接近實際控制電路驅動下運行的電機,仿真結果精度更高。筆者首先利用Maxwell 2D平臺創建三相12/8極外轉子開關磁阻電機模型,并進行動態仿真,得到其動態特性。再利用Simplorer平臺搭建其控制系統,其中電機啟動運行時采用轉速外環PI調節和內環電流斬波控制,電機穩定運行時采用角度位置控制。仿真結果輸出的SRM相關特性曲線,能較為準確地反應出電機在控制電路下的特性,能為以后電機的實體設計和控制提供借鑒。
1SRM有限元模型的建立與計算
1.1SRM的結構參數
由于SRM定子繞組上采用集中繞組,轉子上無繞組,此種結構具有結構牢固、運行可靠、耐高溫等優點,非常適合于電動汽車的應用[3]。根據SRM的定子和轉子的不同設計方式,常用的SR電機結構主要有內轉子和外轉子兩種。其中外轉子式因為沒有減速裝置,因此車輪轉速與電機轉速相同,其轉速可在800~1 500 rpm之間。SRM的相數越多,步距角就越小,這能抑制轉矩波動。但相數增多,定、轉子的磁極數就會增多,使SRM結構變復雜,增多功率變換器的主要開關元件數,使其成本增加。筆者根據電動汽車輪轂式驅動系統的要求,釆用三相外轉子結構,定子12極、轉子8極,其結構如圖1,優化后的電機結構參數見表1。

圖1三相12/8極外轉子開關磁阻電機結構Fig.1Structure of three-phase external rotor 12/8 switched reluctance motor

表1電機結構參數Table 1Structural parameters of the motor
1.2SRM的有限元計算
由于SRM在工作期間,磁路非常容易飽和,這不但使系統有很強的非線性(磁鏈對轉子位置角和相電流的非線性),而且不同轉子位置下對應有不同的磁化曲線。因此傳統的電磁場計算方法對其求解變得困難。而有限元法相較傳統方法更利于解決非線性這類問題——其能使復雜結構、復雜邊界的定解問題的求解變得容易。
Ansoft Maxwell是一款功能完善、計算精確、使用便捷的二維電磁場有限元分析軟件[4]。在Maxwell平臺下,利用導入CAD格式的定、轉子沖片的方法,建立好外轉子SRM模型,在不搭建功率變換器的情況下,進行初步動態仿真分析。圖2是SRM的外轉子在不同位置時的磁力線分布,圖3是SRM動態特性下的不同勵磁電流對應的轉矩特性曲線。

圖2磁力線分布Fig.2Distribution of magnetic lines
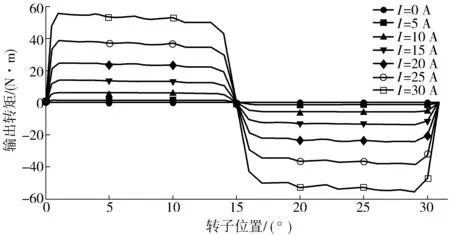
圖3轉矩特性曲線Fig.3Torque characteristic curve
2SRD聯合仿真
2.1SRM的控制方式
開關磁阻電機調速系統(SRD)主要由SRM本體、功率變換器、控制器、位置檢測器、電流檢測器5部分組成,如圖4。
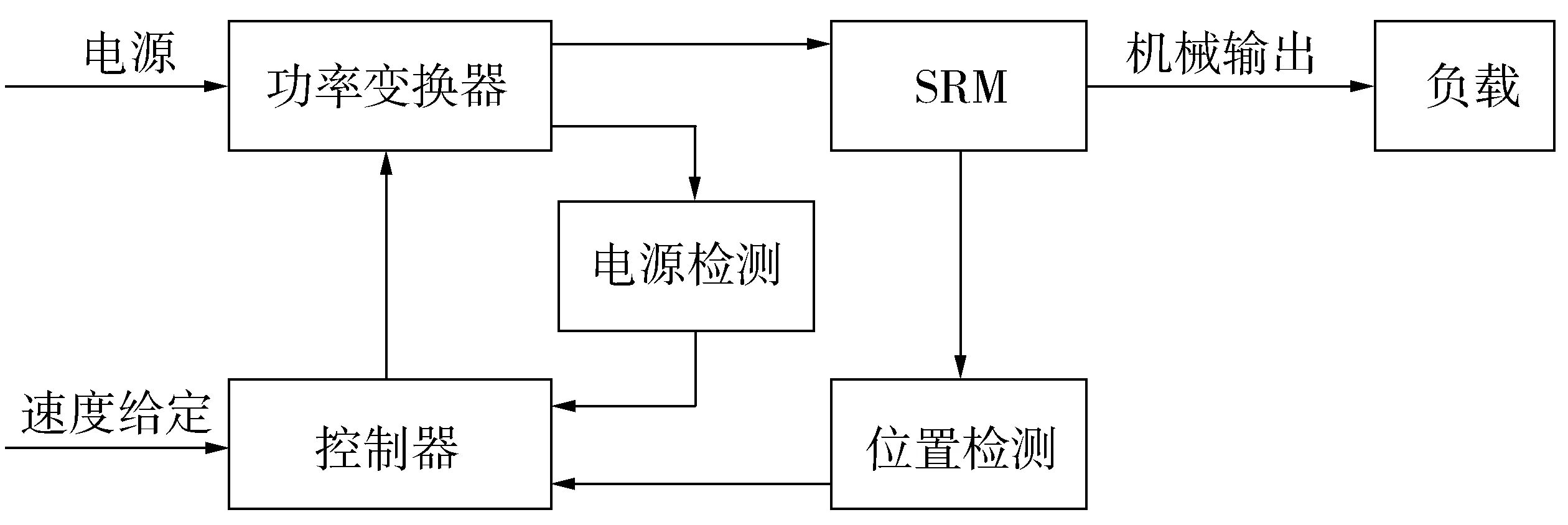
圖4開關磁阻電機調速系統Fig.4Speed regulating system of the switched reluctance motor
SRD的可控變量有相電壓Uk、相電流ik、開通角θon、關斷角θoff等參數。針對以上的可控變量的控制方式一般分為3種,即角度位置控制方式(APC)、電流斬波控制方式(CCC)和電壓斬波控制方式(CVC)[5]。
當SRM以低速特別是啟動工況運行時,反電動勢的壓降小,會使繞組相電流迅速增大。為了防止過大的電流脈沖燒壞功率變化器的開關器件或電機本體,需要限定相電流峰值。因此,可采用電流斬波控制,獲取恒轉矩的機械特性。
圖5為電流斬波波形,當轉子位置角θ處于電流導通區域時,若相電流i小于電流斬波限ichop,則主開關開通,相電流上升直至斬波上限Imax;若相電流i大于電流斬波限ichop,則主開關關斷,相電流下降至斬波下限Imin;如此循環,相電流將維持在斬波限附近,并伴有較小波動。
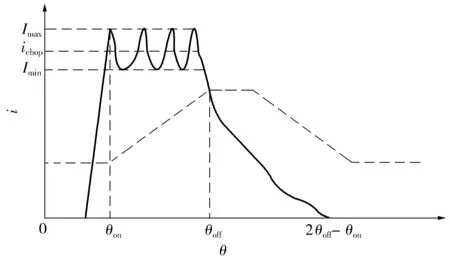
圖5電流斬波波形Fig.5Current chopped wave
SRM在穩定或者高速運行時,當穩定繞組端的電壓情況下,改變繞組上的主開關的開通角θon、關斷角θoff,來改變繞組的通電、斷電時刻,調節相電流的波形,達到轉速閉環控制。
筆者在Maxwell和Simplorer的仿真環境下,模擬SRM從啟動到穩定運轉的工況,主要用到的控制方式有角度位置控制方式、電流斬波控制方式。
2.2功率變換器電路搭建
Simplorer是一款多領域機電系統設計和仿真分析軟件,電機仿真結果更加接近其實際運行工況,能夠準確的反應其運行特性。在電機仿真中,Simplorer是基于磁路法來計算電機的性能,是路的計算;Maxwell是利用有限元法計算電機本體的電磁性能,是場的計算。Simplorer主要是用來搭建電機的控制電路,其中控制電路是主體核心,電機只是一個受控元器件;Maxwell中電機作為一個獨立的主體部分,采用有限元法對電機的電磁性能詳細的進行仿真模擬。兩款軟件實現聯合仿真,實際上是“場-路”耦合計算的機理,在實際控制電路驅動下運行的電機,仿真出的結果精度更高。
根據SRM基本工作原理可知,其功率變換器的不但起到開關作用,還能為SRM提供電能量,同時為繞組的儲能提供回饋路徑。由于輪轂電機具有高壓大功率的特性,功率變換器一般采用不對稱半橋結構。這種結構能提供各相間的完全獨立控制,主開關器件的電壓容量要求較低,且控制簡單。
在Simplorer環境下構造好功率變換器系統電路,其中開關管選用IGBT,續流二極管直接選取二極管模塊,并將這些模塊元件與導入的SRM有限元模型對接。連接好后的電路拓撲結構如圖6。
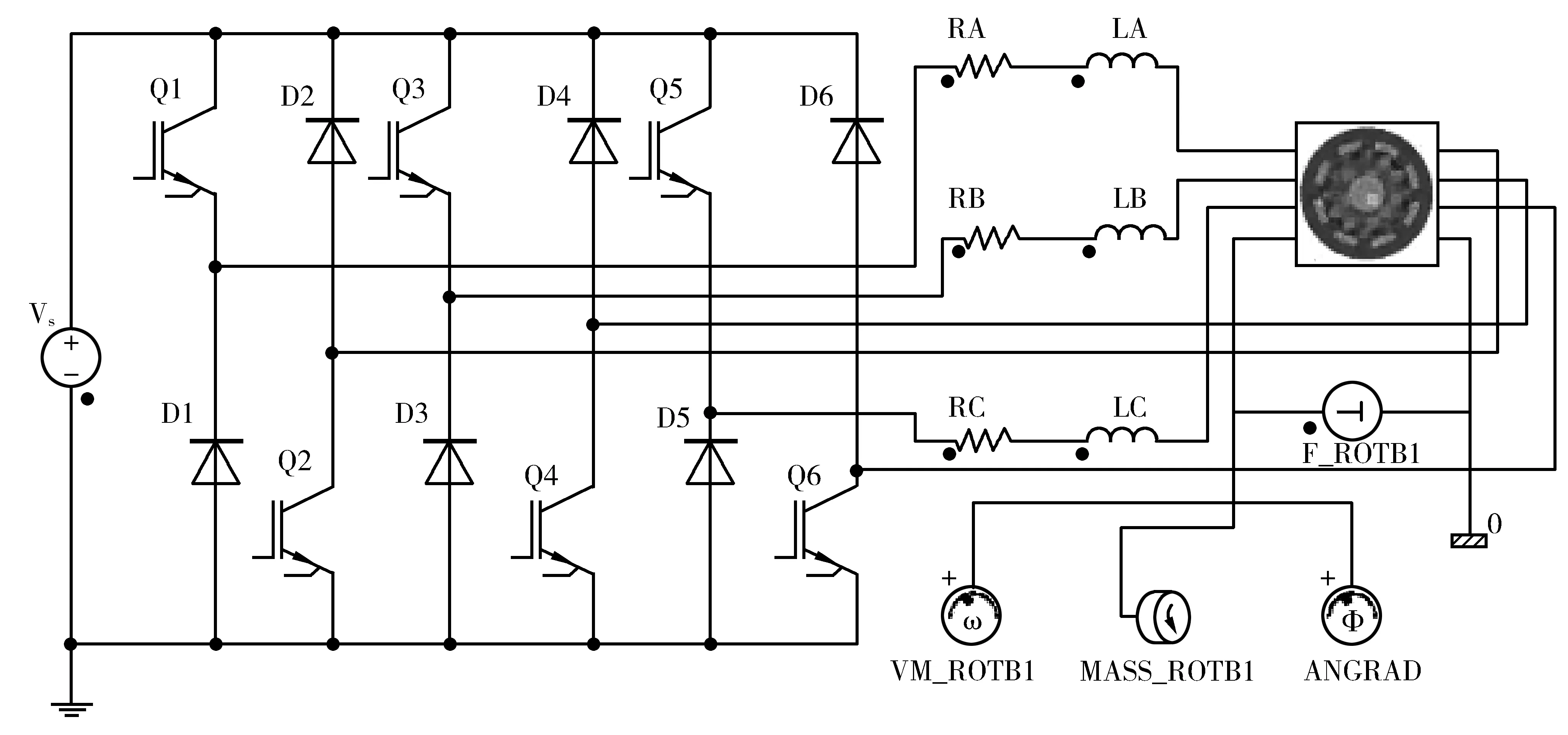
圖6功率變換器電路Fig.6Power converter circuit
2.3SRM啟動控制模型
SRM工作是在功率變換器中IGBT有規律的通斷下進行的。因此針對SRM的控制,主要是針對IGBT通斷邏輯的控制。SRM啟動工況仿真時,對SRM的控制主要是內環電流斬波控制和外環轉速PI控制。
PI控制是在長期的工程實踐中總結出來的一套控制方法,其控制結構簡單,參數調整方便,已經成為系統控制理論中技術最成熟、應用最廣泛的一種控制技術[6]。
同時,由于運轉過程中SRM的高度非線性,使系統整體控制性能分析變得困難。小信號的擾動可局部線性化SRM的非線性特性,降低運算難度[7]。根據小信號模型建立的SRD的控制框圖如圖7。
由于外環PID控制的傳遞函數:
GC(s)=kp+ki/s+kds

圖7SRD控制框圖Fig.7Block diagram of SRD control
則系統的開環傳遞函數G(s)=GC(s)GP(s)為

式中:i0為穩態電流;L為任意轉子位置角θ對應的相電感。該傳遞函數是設計外環PID控制器所必的[8]。
在Simplorer環境下,根據控制框圖搭建外環轉速PI控制和內環電流斬波控制模型如圖8。

圖8雙閉環控制模型Fig.8Control model of double closed loop
通過將SRM實際轉速信號ω和給定轉速信號ωcmd進行比較,從而產生速度偏差信號e。該偏差信號經外環PI調節,輸出參考電流icmd作為電流環的輸入信號,將其與相電流信號LA/LB/LC進行比較所得的電流值經由電流滯環比較器進行限幅,從而實現電流斬波控制。
同時在PI控制中,系統要得到預期效果往往取決于對各控制參數的選擇。kp值小易產生偏移,值大會引起振蕩;ki值過大也會使系統振蕩、不穩定。不同的運行階段,kp、ki的取值也有不同的要求。因此,PI參數可以用位置或轉速的誤差e函數表示:

由上兩式可以看出,kp、ki能在一定的范圍內隨系統輸入誤差e的變化作出即時調整,更好地滿足系統的動態控制要求[9]。
2.4SRM穩定控制模型
SRM啟動后,為了讓SRM運行平穩,要確定換相電流的通斷順序及每相的通斷時間,這時用到的主要控制方式是角度位置控制(APC)。
對IGBT的通斷控制是建立在Simplorer平臺的狀態機模塊上,如圖9。筆者的SRM是三相電機,功率電路采用單相導通,三相導通順序為B-C-A-B,各相導通相差15°,周期為45°。在單個周期內,一個通斷循環可以被分為6個狀態,每相包括接通與否兩個狀態。期中一個狀態一直處于激活狀態(a_on),直到轉子通過關斷角位置(a_off)才關斷。

圖9位置控制模型Fig.9Position control model
3啟動和穩態工況仿真分析
按上述方法完成模型搭建后,進行SRM啟動工況仿真。為了不使繞組啟動電流限值過小以保證輪轂能順利啟動,電流斬波法設置的斬波電流對應的轉矩應大于電動車啟動所需轉矩。根據電動車啟動所受的行駛阻力(包括滾動阻力、加速阻力、空氣阻力),設置電機所帶負載,內環電流斬波控制中電流斬波設置為上斬90A,下斬70A,直到電機進入穩定運行停止。仿真后得到SRM相電流曲線、轉速曲線、輸出轉矩曲線,如圖10~圖12。

圖10相電流曲線Fig.10Phase current curve

圖11轉速曲線Fig.11Rotating speed curve

圖12輸出轉矩曲線Fig.12Output torque curve
從圖10可以看出,在啟動時由于斬波上限設置較低,則電機的勵磁電流偏低,轉子轉動較為緩慢,B相電流持續了較長時間才換相到下一相。如將斬波上限設置較高,則啟動狀態的轉矩與穩定狀態的轉矩落差會加大,轉矩波動也更為劇烈,這不利于SRM的穩定運行。
SRM進行穩定工況模擬仿真時,由于外轉子式輪轂電機沒有減速裝置,車輪轉速與電機轉速相同,因此設定穩定轉速為800 rpm。得到電機的IGBT通斷信號曲線、相電流曲線和輸出轉矩曲線,如圖13~圖15。
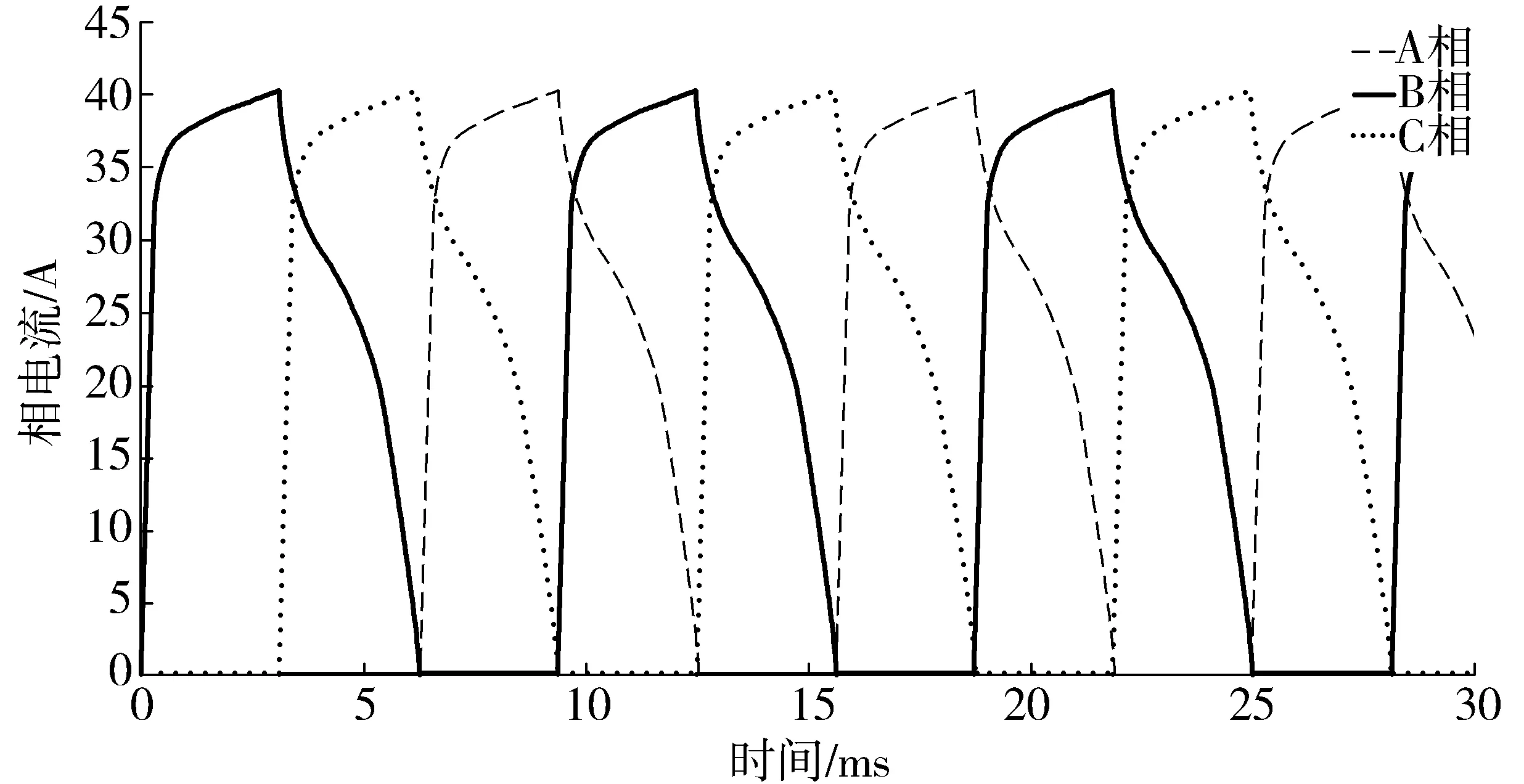
圖14相電流曲線Fig.14Phase current curve

圖15輸出轉矩曲線Fig.15 Output torque curve
從圖14可知,在SRM穩定運行時的電流峰值為40 A,與斬波法穩定后的峰值電流非常接近;圖15所示的輸出轉矩曲線也與圖12后半部位達到穩定的輸出轉矩接近,這間接驗證了啟動工況的準確性。
從圖15可知,SRM穩定工況的轉矩脈動為30~100 N·m,波動較大,同時諧波含量較多。這可能和此時的通電方式為單相通電有關。SRM的通電方式對電機的特性影響較大,常用的通電方式有單相通電和雙相通電。單相通電是通過位置信號確定定轉子間的相對位置和各相所處電感曲線的位置以確定通電繞組。單相通電電機容易出現無法起動或出現振蕩現象。雙相通電方式是根據定轉子位置對處于電感上升區的所有繞組同時通電,選擇合適的通電組合可實現最小轉矩達到單相的峰值轉矩,有效提高了電機的起動性能。對SRM電機采用雙相通電方式,輸出轉矩曲線如圖16。
從圖16可以看到,采用雙相通電的SRM不但平均轉矩有較大提高,而且轉矩波動有明顯減小。
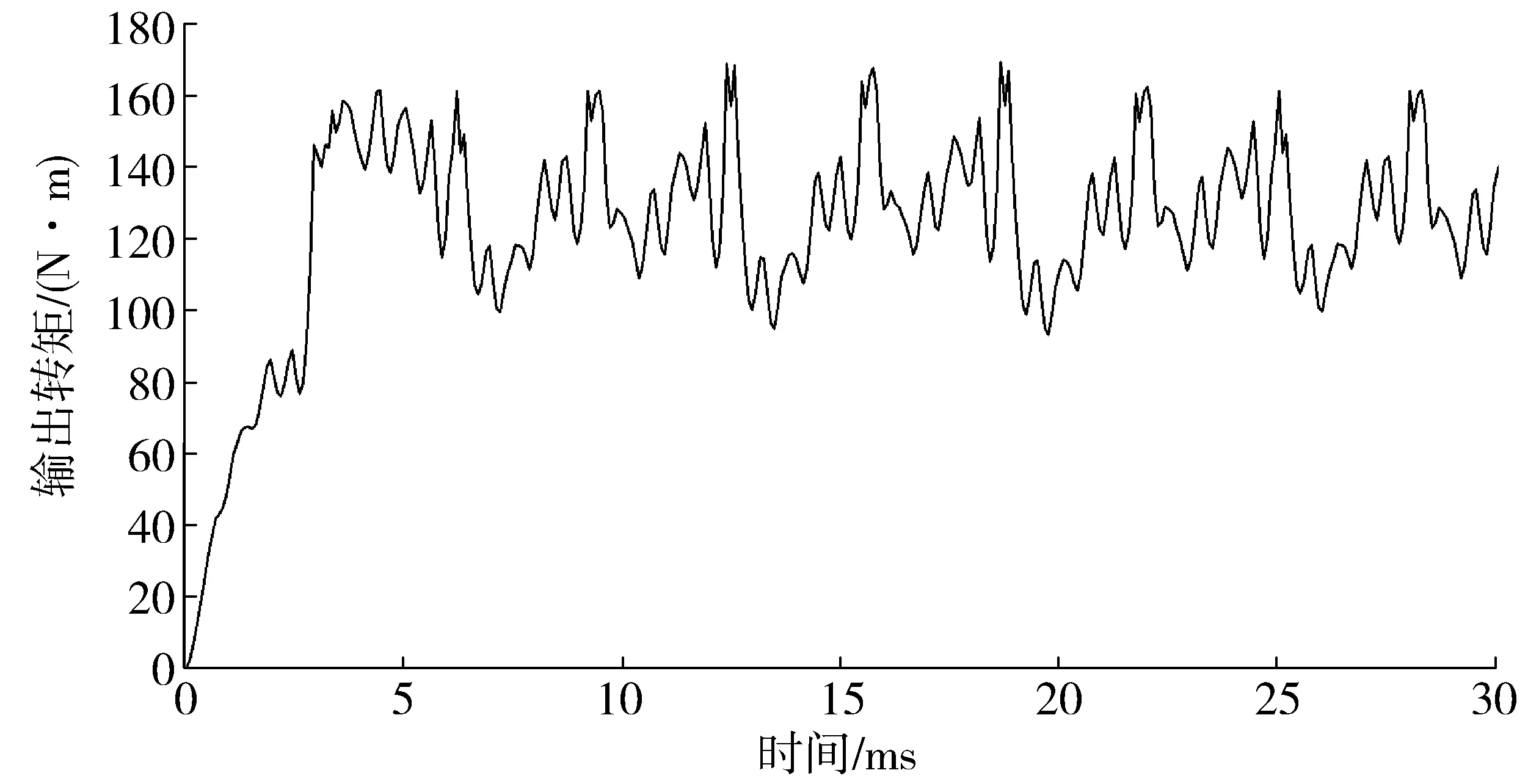
圖16雙相導通輸出轉矩曲線Fig.16 Two-phase output torque curve
4結語
筆者利用電磁場分析軟件Maxwell和磁路計算軟件Simplorer,對輪轂式外轉子開關磁阻電機進行聯合仿真分析。仿真結果較為準確地反應了在啟動和穩定運行兩種工況下開關磁阻電機各相相電流的走勢和輸出轉矩特性。在模擬仿真SRM啟動工況時,如果電流斬波法設置的斬波上限大,斬波區間較寬,會使電機輸出轉矩波動增大,不利于電機運行;但此時電機進入穩定運行的時間相對較短,電機啟動迅速,此種工況下的控制還有進一步優化的空間。
[1] 李元東.電動汽車用輪轂式開關磁阻電機及驅動系統研究[D].山東:山東大學,2014.
LI Yuandong.TheStudyofIn-WheelSwitchedReluctanceMotorandDrivingSystemBasedonUseofElectiveVehicle[D].Shandong: Shandong University,2014.
[2] 閆大偉,陳世元.電動汽車驅動電機性能比較[J].汽車電器,2004(2):4-6.
YAN Dawei,CHEN Shiyuan.Performance compare of driving motors on EV[J].Auto Electric Parts,2004(2): 4-6.
[3] 吳建華.電機開關磁阻電機設計與應用[M].北京:機械工業出版社,2000.
WU Jianhua.SwitchedReluctanceMotorDesignandApplication[M].Beijing: China Machine Press,2000.
[4] 劉國強,趙凌志,蔣繼婭.Ansoft工程電磁場有限元分析[M].北京:電子工業出版社,2006.
LIU Guoqiang,ZHAO Lingzhi,JIANG Jiya.FiniteElementAnalysisofProjectofAnsoftElectromagneticField[M].Beijing: Electronic Industry Press,2006.
[5] 吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010.
WU Hongxing.SwitchedReluctanceMotorSystemTheoryandControlTechnology[M].Beijing: China Electric Power Press,2010.
[6] 夏長亮,王超明.基于RBF神經網絡的開關磁阻電機單神經元PID控制[J].中國電機工程學報,2005,25(15):161-165.
XIA Changliang,WANG Chaoming.Single neuron PID control for switched Reluctance motors based on RBF neural network[J].ProceedingsoftheChineseSocietyforElectricalEngineering,2005,25(15): 161-165.
[7] HOSSAIN S A.ModelingandFourQuadrantControlofASensorlessSwitchedReluctanceMotorDrivenActuatorSystem[D].Akron,USA: University of Akron,2002.
[8] 梁得亮,丁文,程竹平.基于Simplorer的三相開關磁阻起動/發電系統建模研究[J].西安交通大學學報,2007,41(10):1210-1213.
LIANG Deliang,DING Wen,CHENG Zhuping.Modeling for three-phase switched reluctance starter/generator system[J].Journal of Xian Jiaotong University,2007,41(10):1210-1213.
[9] DING Wen,LIANG Deliang,CHENG Zhuping.Dynamic model and simulation for a 6/4 switched reluctance machine system assisted by maxwell spice and simplorer[C]//Proceedingsofthe2007IEEEInternationalConferenceonMechatronicsandAutomation. New York,US: IEEE,2007:1699-1704.
(責任編輯:譚緒凱)
Analysis and Research of In-wheel SRD Based on Maxwell and Simplorer
JIANG Baojun1,ZHOU Lin1,HUANG Dafei2
(1.School of Electromechanical & Automotive Engineering,Chongqing Jiaotong University,Chongqing 400074,P. R. China;2.China Automotive Engineering Research Institute,Chongqing 401122,P. R. China)
Due to the structure characteristics of in-wheel switched reluctance motor,its electromotive relationship was quite complex.Modeling and simulation of individual motors could not simulate their actual operation conditions accurately.Therefore,finite element model of in-wheel switched reluctance motor was established at Maxwell environment,and then power converter and control circuits were also established to run “filed-path” coupled calculations,combining with Simplorer software.Simulation analysis on two working conditions of starting and steady running of motor was carried out,and its operation characteristics were obtained.The results of the combined simulation accurately reflect the motor’s actual operation situation,which provides reference to control and optimize the speed regulating system of in-wheel switched reluctance motor.
vehicle engineering; switched reluctance motor; Maxwell; Simplorer; angular position control; current chopping control
U469.72;TM352
A
1674-0696(2017)10-112-06
2016-05-21;
2017-01-16
姜保軍(1965—),男,黑龍江綏化人,博士,副教授,主要從事電機驅動與控制及電機驅動系統電磁兼容方面的研究。E-mail:jiang031@163.com。
周林(1990—),男,四川遂寧人,碩士,主要從事新能源汽車開關磁阻電機方面的研究。E-mail:519464718l@qq.com。
10.3969/j.issn.1674-0696.2017.10.19
