基于586-Driver的無人機(jī)飛控計(jì)算機(jī)智能檢測系統(tǒng)研制
2017-11-03 03:13:29志宇
計(jì)算機(jī)測量與控制 2017年10期
,, ,志宇
(1.南京航空航天大學(xué) 中小型無人機(jī)先進(jìn)技術(shù)工信部重點(diǎn)實(shí)驗(yàn)室,南京 210016;2.南京航空航天大學(xué) 自動化學(xué)院,南京 10016)
基于586-Driver的無人機(jī)飛控計(jì)算機(jī)智能檢測系統(tǒng)研制
高艷輝1,肖莉萍1,李強(qiáng)2,李志宇1
(1.南京航空航天大學(xué)中小型無人機(jī)先進(jìn)技術(shù)工信部重點(diǎn)實(shí)驗(yàn)室,南京210016;2.南京航空航天大學(xué)自動化學(xué)院,南京10016)
傳統(tǒng)無人機(jī)飛控計(jì)算機(jī)檢測以人工操作為主,操作繁瑣、數(shù)據(jù)量大、易受人為因素影響,導(dǎo)致測試效率低、結(jié)果主觀性強(qiáng)、安全性不足;提出基于信號門限自動檢測技術(shù)的飛控計(jì)算機(jī)一鍵式全功能檢測方案;以586-Driver板卡為核心,設(shè)計(jì)了接口板、電源板、信號調(diào)理板和檢測板,研制了智能檢測系統(tǒng);模塊功能包括底層驅(qū)動、時(shí)序控制、上電控制與電流檢測、功能檢測等模塊,實(shí)現(xiàn)了在全程無人干預(yù)情況下對飛控計(jì)算機(jī)按預(yù)設(shè)時(shí)序邏輯的自動測試;采用人為注入故障測試方式進(jìn)行了系統(tǒng)測試,結(jié)果表明:該系統(tǒng)滿足某型飛控計(jì)算機(jī)的檢測需求,提高了飛控計(jì)算機(jī)檢測效率,具有實(shí)際工程應(yīng)用價(jià)值。
飛控計(jì)算機(jī);586-Driver;自動檢測;信號門限檢測
0 引言
隨著航空技術(shù)和電子技術(shù)的發(fā)展,無人機(jī)技術(shù)越來越先進(jìn),無人機(jī)機(jī)載電子設(shè)備也越來越復(fù)雜,使得無人機(jī)出現(xiàn)故障的概率越來越高。因此,無人機(jī)這一復(fù)雜系統(tǒng)的維護(hù)保障已經(jīng)提升到了和無人機(jī)研制同等重要的地位[1]。飛控計(jì)算機(jī)是無人機(jī)關(guān)鍵設(shè)備,不管在研制期間,還是在交付使用后都必須對其進(jìn)行大量的地面檢測[2],以保證無人機(jī)系統(tǒng)的安全性和可靠性。
傳統(tǒng)的飛控計(jì)算機(jī)檢測以人為操作為主,通過測試人員手動切換測試項(xiàng)并手動添加激勵(lì),觀察測試現(xiàn)象并記錄結(jié)果。但由于飛控計(jì)算機(jī)性能測試的被測信號具有種類多、特性范圍寬、判據(jù)復(fù)雜的特點(diǎn),傳統(tǒng)的測試方法既費(fèi)時(shí)又費(fèi)力,還會影響無人機(jī)的試驗(yàn)進(jìn)度。
本文利用信號門限檢測技術(shù),基于586-Driver研制了一套自動化、標(biāo)準(zhǔn)化、智能化的飛控計(jì)算機(jī)檢測系統(tǒng),解決傳統(tǒng)測試過程中操作繁瑣、數(shù)據(jù)量大、易受人為因素影響的問題。
1 信號門限檢測技術(shù)原理
自動檢測系統(tǒng)集合了功能強(qiáng)大的計(jì)算機(jī)軟硬件和測量設(shè)備,將所有檢測步驟通過軟件控制,直接產(chǎn)生測試信號,解析測量特性,得出測量結(jié)果[3]。信號門限檢測技術(shù)對于自動檢測系統(tǒng)來說是一種基本但有效的故障檢測方法,具體方法如下[4]:
對被測信號設(shè)置上限ymax和下限ymin,在任一時(shí)刻t,信號的測量值y(t)正常的取值范圍是:
ymin≤y(t)≤ymax
(1)
當(dāng)被測信號的測量值超出該范圍達(dá)到一定次數(shù)或一定時(shí)間時(shí),則說明系統(tǒng)處于故障狀態(tài),需排查故障。引進(jìn)標(biāo)記:
|Δy(t)|<α
(2)
根據(jù)被測信號的特點(diǎn)不同,門限檢測的規(guī)則也會發(fā)生變化,有些被測信號只需檢驗(yàn)上限或下限,有些則必須滿足某一定值,表達(dá)式如下:
y(t)≤ymax或y(t)≥ymin
(3)
y(t)=y*
(4)
2 系統(tǒng)總體設(shè)計(jì)
2.1 一鍵式全功能檢測方案
被測飛控計(jì)算機(jī)具有檢測內(nèi)容多、檢測時(shí)間短以及檢測結(jié)果務(wù)必準(zhǔn)確的特點(diǎn),要求自動檢測系統(tǒng)必須具有較強(qiáng)的數(shù)據(jù)處理能力和較快的運(yùn)行速度,以便能夠在規(guī)定的任務(wù)周期內(nèi)完成所有的檢測任務(wù)。本系統(tǒng)采用一鍵式全功能檢測方案,包括上電、電流監(jiān)測、功能檢測、正常斷電以及應(yīng)急斷電保護(hù)等均要求由系統(tǒng)按時(shí)序邏輯控制自動完成。自動檢測流程設(shè)計(jì)如下:
1)上電控制。待測飛控計(jì)算機(jī)供電時(shí)序如圖1所示。為了保證供電安全,在對待測飛控計(jì)算機(jī)供電的同時(shí),需對4路供電電流進(jìn)行實(shí)時(shí)采集、監(jiān)測,并在電流異常時(shí)及時(shí)進(jìn)行斷電處理。
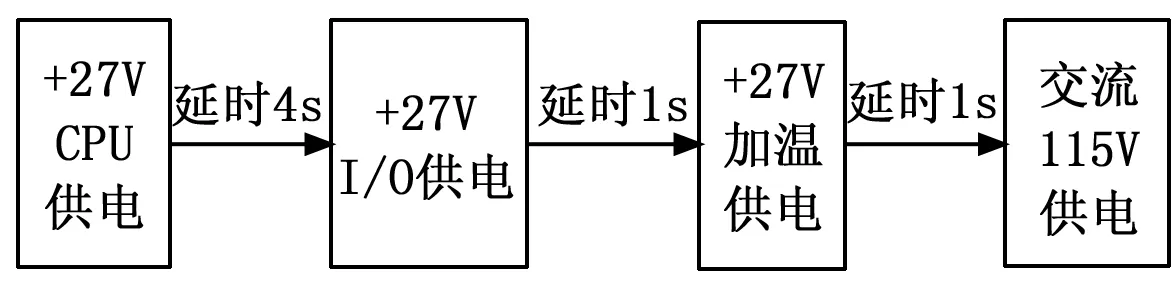
圖1 供電時(shí)序
2)飛控計(jì)算機(jī)功能測試。本系統(tǒng)包括了對飛控計(jì)算機(jī)的串口、SSD卡、DI、DO、A/D、D/A功能的檢測。為了獲取可靠的檢測結(jié)果,排除各功能間的交叉影響,采取了各功能依次測試的方法。每種功能的檢測步驟為:586-Driver發(fā)出測試信號,等待規(guī)定時(shí)間后采集并解析測量值,將測量結(jié)果與對應(yīng)門限值進(jìn)行比較得出檢測結(jié)果。
3)待機(jī)狀態(tài)。系統(tǒng)全自動檢測完成后進(jìn)入了待機(jī)狀態(tài),等待測試人員發(fā)出下一步的檢測指令。測試人員可以根據(jù)檢測結(jié)果選擇再次全自動檢測,也可以針對某一功能進(jìn)行單項(xiàng)檢測。
2.2 總體結(jié)構(gòu)設(shè)計(jì)
飛控計(jì)算機(jī)智能檢測系統(tǒng)的主要思想是以586-Driver為核心模擬飛控計(jì)算機(jī)所需的信息,通過串口、I/O、D/A等通道將信息傳遞給飛控計(jì)算機(jī),并監(jiān)測、檢測飛控計(jì)算機(jī)的返回信息,對飛控計(jì)算機(jī)進(jìn)行全方位的功能檢測與故障診斷。智能檢測系統(tǒng)的總體框架如圖2所示。

圖2 無人機(jī)飛控計(jì)算機(jī)智能檢測系統(tǒng)總體框圖
3 硬件設(shè)計(jì)
根據(jù)586-Driver板卡特點(diǎn)以及串口擴(kuò)展卡與其他電路的應(yīng)用需求,基于易于拆卸、維護(hù)方便的原則,智能檢測系統(tǒng)采用堆棧式構(gòu)架,將整個(gè)硬件結(jié)構(gòu)分為4個(gè)部分:586-Driver及其接口板、電源板、信號調(diào)理板和檢測板。
3.1 主控芯片選型及資源分配
在綜合考慮了對處理性能、片上資源、穩(wěn)定性以及成本的多重要求后,本文選擇TERN公司的586-Driver板卡作為主控芯片。586-Driver是基于AMD Elan SC520微處理器的核心板卡,集成了32位的AMD586中央處理器以及高性能硬件浮點(diǎn)運(yùn)算單元(FPU)[5]。586-Driver板卡資源分配情況如表1所示。

表1 586-Driver板卡資源分配表
3.2 擴(kuò)展串口選型及資源分配
串口擴(kuò)展卡選用高性能的基于PC104總線的UR8M。UR8M是TERN公司的8路異步串口擴(kuò)展卡,可以與586-Driver連接使用,無需多余的硬件接口設(shè)計(jì)。該卡提供RS232、RS485、RS422多種串口工作方式。每個(gè)通道FIFO高達(dá)64字節(jié),可以減小CPU的中斷數(shù)量并降低軟件開銷,滿足系統(tǒng)需求。
3.3 信號變換與調(diào)理模塊
586-Driver上的D/A單元LT2600用于輸出5路模擬信號來模擬陀螺平臺(θ俯仰角、γ滾轉(zhuǎn)角)和速率陀螺(ωx滾轉(zhuǎn)角速率、ωz俯仰角速率、ωy偏航角速率)的信息。該信號需進(jìn)信號調(diào)理后,輸出至飛控計(jì)算機(jī)。
信號調(diào)理電路的設(shè)計(jì)思路是將輸入信號進(jìn)行電平平移、放大或縮小,然后再進(jìn)行低通濾波處理,除去高頻噪聲,以保證轉(zhuǎn)換后的信號平滑穩(wěn)定。本系統(tǒng)選用OP497FS高性能4運(yùn)放芯片作為信號調(diào)理電路的核心芯片,選用REF43芯片為電平平移電路提供+2.5 V的電壓參考進(jìn)行設(shè)計(jì)。
3.4 電流測量與供電控制
待測飛控計(jì)算機(jī)需要4路電源:1路115 V交流電源和3路+27 V直流電源。電流檢測與供電控制電路要實(shí)現(xiàn)對供電電源的通斷控制并且實(shí)時(shí)檢測電流大小,以保證飛控計(jì)算機(jī)的供電安全。
以+27 V電源為例,電流檢測與供電控制電路設(shè)計(jì)如圖3所示。586-Driver通過DO端口控制電磁繼電器,進(jìn)而控制+27 V電源是否接入飛控計(jì)算機(jī),同時(shí)由A/D通道實(shí)時(shí)采集霍爾電流傳感器的測量結(jié)果,其反饋電壓一旦超出了預(yù)定范圍,系統(tǒng)將自動控制DO端口停止對飛控計(jì)算機(jī)供電,達(dá)到保護(hù)飛控計(jì)算機(jī)的目的。
4 軟件設(shè)計(jì)
本系統(tǒng)的時(shí)序控制、上電控制、自動檢測等策略都是通過軟件最終實(shí)現(xiàn)。軟件開發(fā)環(huán)境為Paradigm C++ TERN Edition,采用C語言編程。軟件工程采用模塊化設(shè)計(jì),由初始化模塊、硬件底層接口模塊、時(shí)序控制模塊、上電控制與電流檢測模塊、功能檢測模塊以及待機(jī)管理等組成。
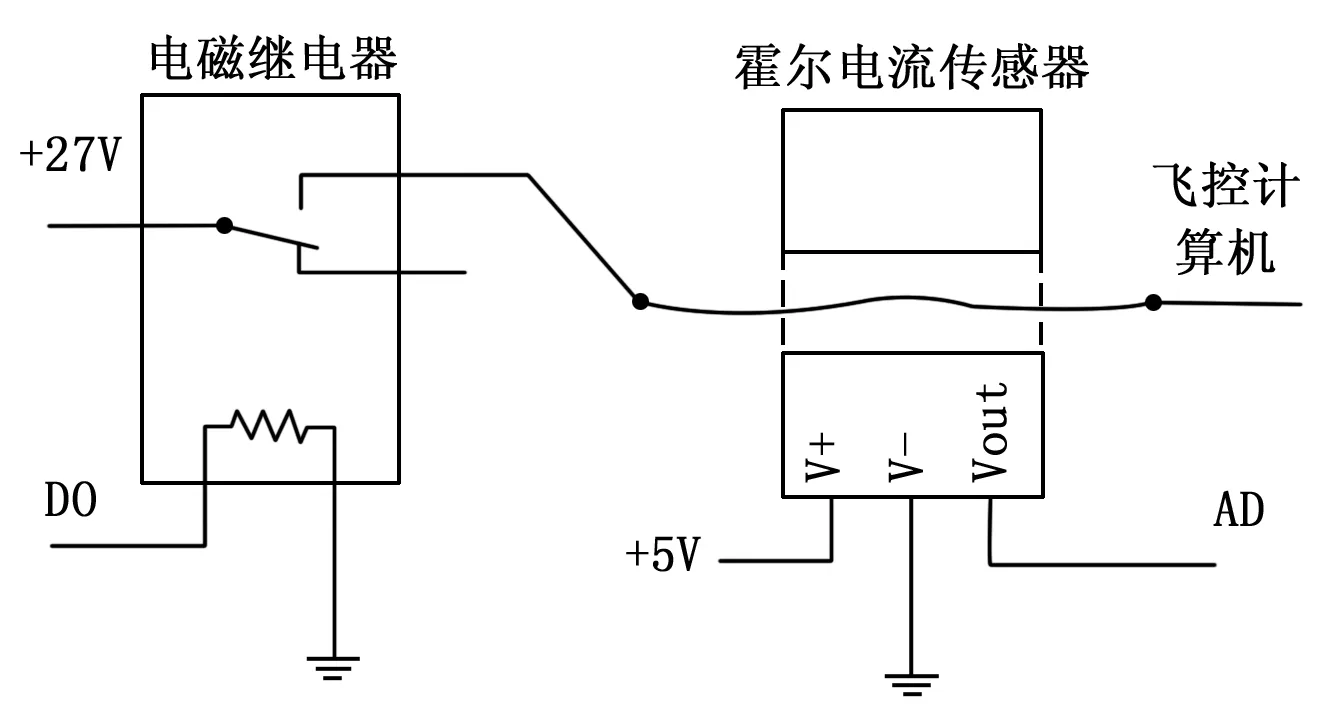
圖3 電流檢測與供電控制電路
初始化模塊完成系統(tǒng)硬件、控制參數(shù)、軟件變量的初始化工作。
硬件底層接口模塊完成以下功能:
1)時(shí)鐘中斷模塊:定時(shí)產(chǎn)生10 ms時(shí)鐘中斷,用于系統(tǒng)周期運(yùn)行時(shí)間間隔基準(zhǔn);2)AD采樣模塊:實(shí)現(xiàn)AD通道的電壓信號的實(shí)時(shí)采樣;3)DA輸出模塊:實(shí)現(xiàn)DA通道的電壓信號實(shí)時(shí)刷新;4)串行通訊模塊:采用定時(shí)方式,實(shí)現(xiàn)串行數(shù)字量信息的發(fā)送和接收處理;5)數(shù)字量接口模塊:利用中斷或查詢方式實(shí)現(xiàn)數(shù)字離散量的接收,同時(shí)根據(jù)任務(wù)需要實(shí)現(xiàn)數(shù)字量的高低電平輸出。
4.1 時(shí)序控制模塊
為了實(shí)現(xiàn)時(shí)序控制,預(yù)先對系統(tǒng)檢測每一步操作之間的時(shí)間間隔進(jìn)行分析并以數(shù)組的形式儲存、固化在軟件中。軟件運(yùn)行后,根據(jù)運(yùn)行時(shí)間控制自動檢測的進(jìn)程。
4.2 上電控制與電流檢測模塊
上電控制與電流檢測模塊的程序流程圖如圖4所示。當(dāng)系統(tǒng)為飛控計(jì)算機(jī)供電時(shí),開始進(jìn)行電流檢測。電流需進(jìn)行門限檢測判斷,若其超過門限范圍,則將電流異常征兆次數(shù)i加1,當(dāng)測量值連續(xù)n次(本文取5)超過門限值時(shí),認(rèn)為供電電流存在異常,需要進(jìn)行斷電處理并報(bào)警。
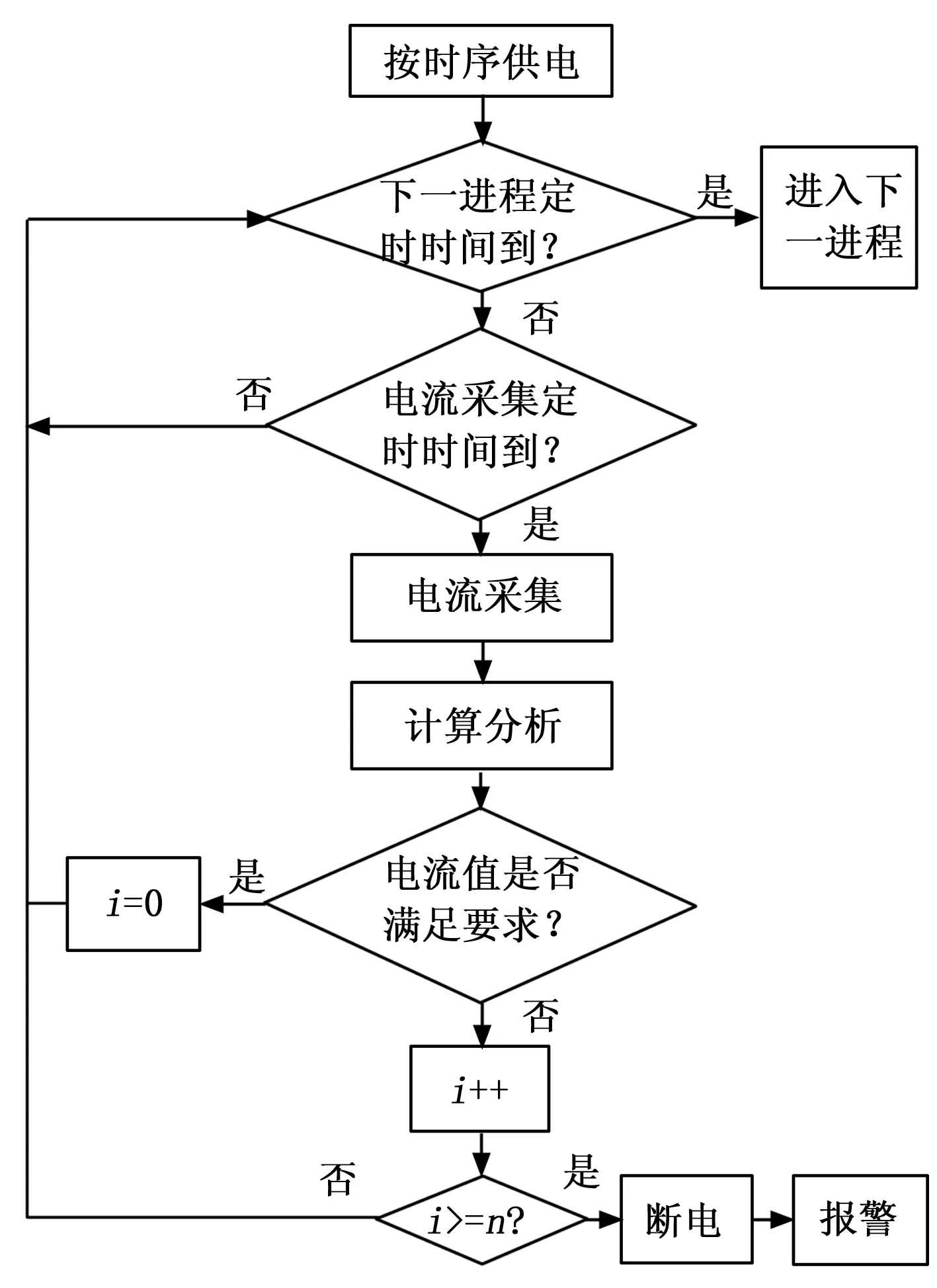
圖4 上電控制與電流檢測流程
4.3 功能檢測模塊
功能測試模塊是智能檢測系統(tǒng)的核心功能,實(shí)現(xiàn)對飛控計(jì)算機(jī)硬件接口、板卡的檢測,單項(xiàng)功能檢測流程如圖5所示。首先初始化變量i、j,i表示檢測次數(shù),j表示故障發(fā)生的次數(shù)。然后系統(tǒng)發(fā)出檢測信號,實(shí)時(shí)接收或延時(shí)接收返回值,再將返回值與門限值進(jìn)行比較。由于單次檢測存在一定偶然性,所以每項(xiàng)功能都要檢測多次。當(dāng)返回值超出門限值時(shí),則將故障次數(shù)加1,當(dāng)故障發(fā)生次數(shù)大于n次時(shí),則認(rèn)為發(fā)生故障并記錄。
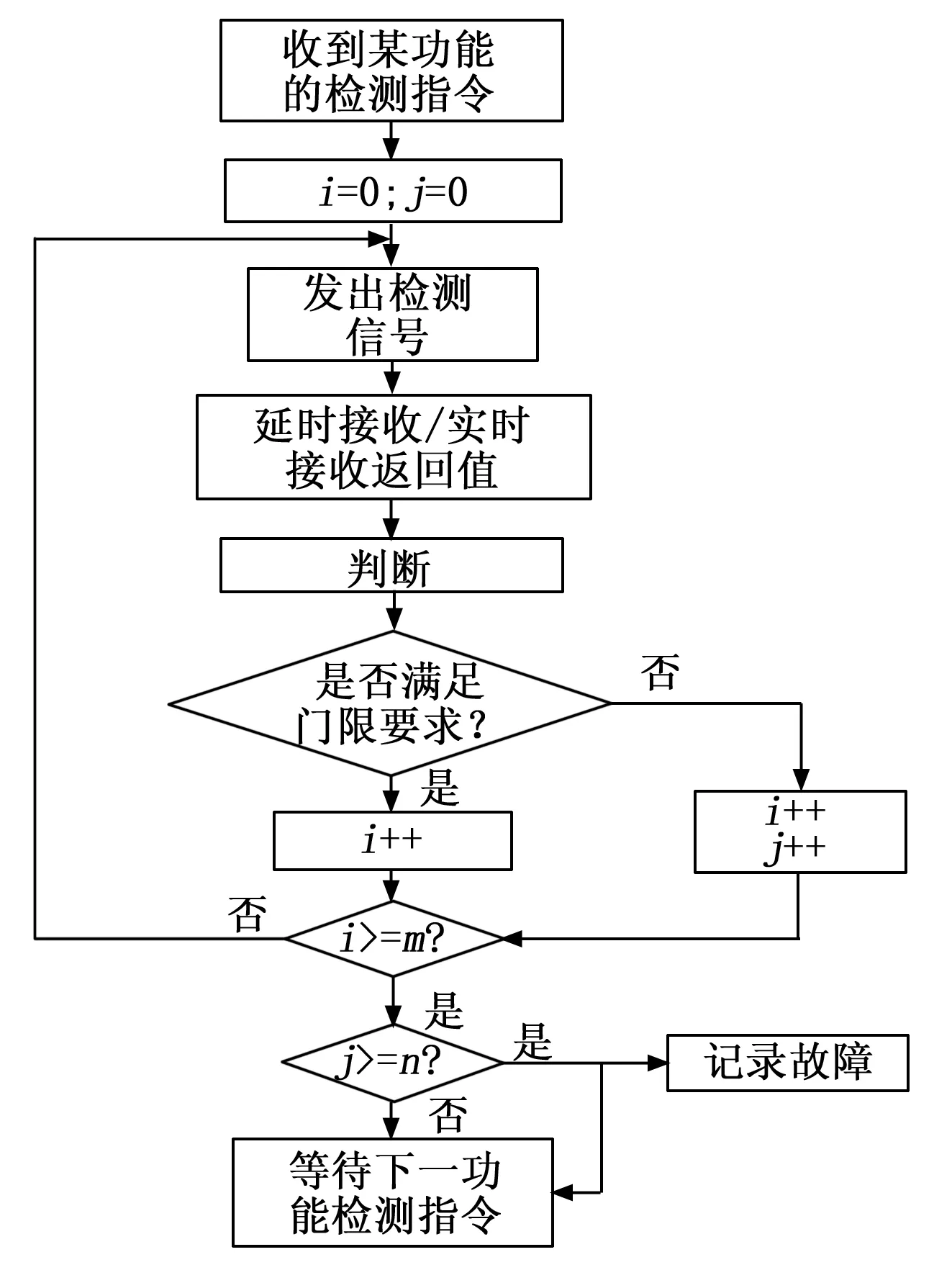
圖5 功能檢測流程
5 系統(tǒng)測試與分析
為驗(yàn)證自動檢測和故障診斷的功能,本文采用人為注入故障的方法進(jìn)行測試。智能飛控計(jì)算機(jī)檢測系統(tǒng)對某型飛控計(jì)算機(jī)進(jìn)行測試的接線關(guān)系示意如圖6所示。經(jīng)過多次測試后,實(shí)驗(yàn)結(jié)果如表2所示。
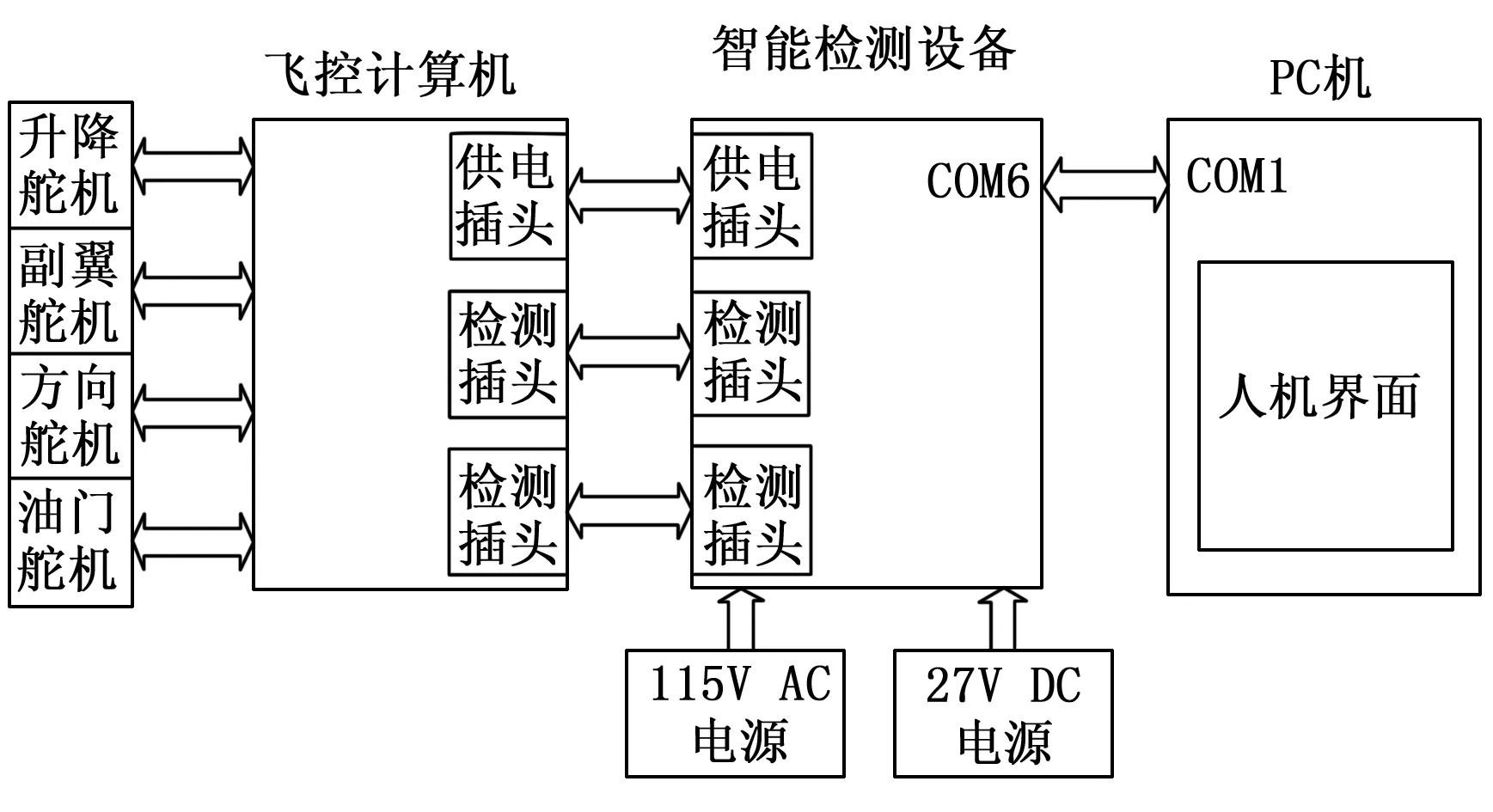
圖6 系統(tǒng)聯(lián)機(jī)調(diào)試接線關(guān)系
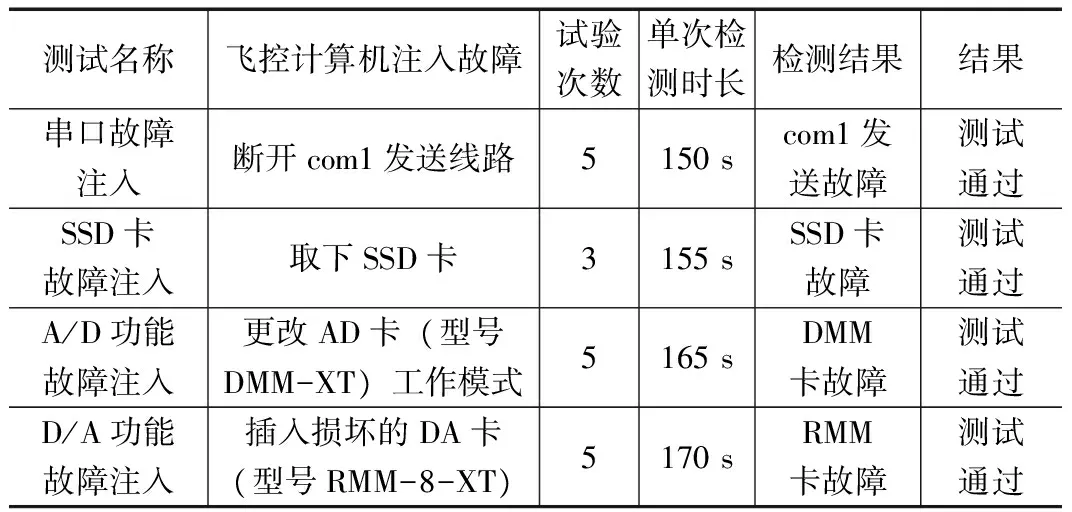
表2 故障注入測試數(shù)據(jù)記錄
由表2可以看出,飛控計(jì)算機(jī)注入的故障都能被智能檢測系統(tǒng)準(zhǔn)確定位,且單次的檢測時(shí)長都在3 min以內(nèi)。而如果要人工進(jìn)行相同的測試項(xiàng)目,單次檢測時(shí)長都在6 min以上。
經(jīng)過系統(tǒng)聯(lián)機(jī)調(diào)試表明:系統(tǒng)各項(xiàng)功能表現(xiàn)良好,能夠準(zhǔn)確、實(shí)時(shí)對飛控計(jì)算機(jī)進(jìn)行自動檢測,實(shí)現(xiàn)了系統(tǒng)設(shè)計(jì)預(yù)期的全部功能需求。
6 結(jié)束語
飛控計(jì)算機(jī)則是飛控系統(tǒng)的大腦,因此對飛控計(jì)算機(jī)的功能進(jìn)行全自動檢測、排除故障是無人機(jī)系統(tǒng)正常運(yùn)行的保障。本文設(shè)計(jì)的基于586-Driver的無人機(jī)飛控計(jì)算機(jī)智能檢測系統(tǒng),當(dāng)飛控計(jì)算機(jī)出現(xiàn)信號異常或故障時(shí),能夠進(jìn)行全功能、自動快速檢測,滿足某型飛控計(jì)算機(jī)的檢測需求,極大地節(jié)省了時(shí)間、解放了人力,在實(shí)際應(yīng)用中取得了良好的實(shí)際效果。
[1] 鐘 志. 分布式無人機(jī)自動檢測系統(tǒng)的研究與設(shè)計(jì)[D]. 南京: 南京航空航天大學(xué), 2004.
[2] 王向民.無人機(jī)地面綜合檢測系統(tǒng)的研究[D].南京:南京航空航天大學(xué), 2003.
[3] 胡 琴. 電氣自動檢測技術(shù)的現(xiàn)狀與發(fā)展. 硅谷] 黃文群. 數(shù)字接收機(jī)中信號檢測及自適應(yīng)門限技術(shù)研究[D]. 重慶: 重慶大學(xué), 2010.
[5] 李 昕, 楊 睿. 基于586-Engine的無人機(jī)飛控系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J]. 航空電子技術(shù), 2008 (2).
[6] 李 強(qiáng), 李志宇, 高艷輝. 基于UR8的586-Engine異步串行通信擴(kuò)展設(shè)計(jì)[J]. 電子設(shè)計(jì)工程, 2015 (13): 105-107.
[7] 翟亞東, 史忠科. 基于CF卡的飛行試驗(yàn)數(shù)據(jù)記錄器的設(shè)計(jì)[J]. 計(jì)算機(jī)測量與控制, 2006,(10):1384-1386.
[8] 李 昕, 方 挺. 基于586-Engine的無人機(jī)飛行控制器設(shè)計(jì)[J]. 世界電子元器件, 2008: 78-81.
[9] 郝允冉, 黃一敏, 史擁軍. 基于586-Engine的高性能飛行控制器設(shè)計(jì)與實(shí)現(xiàn)[J]. 微計(jì)算機(jī)信息,2007: 16-8.
[10]梁潔玫,衣學(xué)慧, 李軍予, 等. 高性能微控制器在控制計(jì)算機(jī)技術(shù)中的應(yīng)用[J]. 控制工程 (北京), 2005 (2): 24-29.
DevelopmentofUAVFlightControlComputerAutomaticDetectionSystemBasedon586-Driver
Gao Yanhui1, Xiao Liping1, Li Qiang2, Li Zhiyu1
(1.Ministerial Key Laboratory of Unmanned Aerial Vehicle Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China; 2.Department of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The most traditional detection of flight control computer of unmanned aerial vehicle (UAV)is manual operation, with cumbersome operation, large amount of data, vulnerable to human factors, resulting in low test efficiency, the results of subjective, lack of security.A one-button full-function detection scheme for flight control computer based on signal threshold automatic detection technology isproposed. A smart system of automatic detection is developed with 586-Driver board as the core. The interface board, power board, signal conditioning board and detection board are designed.Module function include the underlying drive, timing control, power control and current detection, functional testing, which realizes the sequential testing of the flight control computer without manual operation. The system test was carried out by using man-made fault test method. The test result shows: the system meets the requirement of detection,the efficiency of detection of UAV flight control computer is improved.
flight control computer; 586-Driver; automatic detection; signal threshold detection
2017-02-14;
2017-03-10。
高艷輝(1976-),男,河北辛集人,碩士,助理研究員,主要從事無人機(jī)飛控系統(tǒng)方向的研究。
1671-4598(2017)10-0004-03
10.16526/j.cnki.11-4762/tp.2017.10.002
V249
A
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25