太陽能光伏-熱伏發電板的自適應追光系統設計與實現
2017-11-03 02:59:31,,,,
計算機測量與控制 2017年10期
, ,,,
(1.西北工業大學 動力與能源學院,西安 710072;2.西北工業大學 材料學院,西安 710072;3.西北工業大學 機電學院,西安 710072)
太陽能光伏-熱伏發電板的自適應追光系統設計與實現
傅開新1,彭凱1,程思源1,劉俊杰2,周董濤3
(1.西北工業大學動力與能源學院,西安710072;2.西北工業大學材料學院,西安710072;3.西北工業大學機電學院,西安710072)
在小型太陽能光伏-熱伏發電系統中,為了提高其發電效率,通常會輔以自動追光系統;針對現有的基于多光電二極管的自動追光系統結構復雜等問題,提出了一種基于光敏電阻的自適應追光系統;為了實現發電板對光源的追蹤,采用了基于負反饋的自適應追光原理,通過軟件設計控制追光精度,同時增加了系統位置消抖控制;在硬件方面,采用光敏電阻感應光強,借助AD轉換電路和舵機,以驅動太陽能光伏-熱伏發電板轉動直至發電板平面垂直于太陽光;優化設計了光敏電阻與板面的夾角大小以調整追光的區域及誤差;最后完成了整體裝置的機械結構設計和電路圖設計及仿真;結果表明,與現有的多光電二極管追光系統相比,所設計的追光系統機械裝置部分的設計更加簡單,便于實現,同時通過優化設計改善了追光的穩定性。
自適應追光;光敏電阻分布;優化設計;追光穩定性
0 引言
隨著經濟的發展、社會的進步,人們對能源提出越來越高的要求。太陽能發電以其安全、清潔等優點而得到了廣泛的關注與研究。現有的參考資料表明,帶有自動追光系統的太陽發電裝置與位置固定的太陽能發電裝置相比,太陽能的利用率可以提高35%左右[1]。但自動跟光系統在實際的應用過程中,存在著風沙等因素影響機械裝置轉動的準確性和穩定性的問題;同時隨著使用時間的增加,裝置本身的可靠性以及穩定性也會有所降低,進而會影響太陽能追光板的發電效率。上述問題以及人們希望最大限度利用太陽能的現實需求對于自動追光系統的工作品質提出了更高的要求,所以開展太陽能發電裝置自動跟光系統的研究,提高其性能分析,具有重要的意義與工程應用價值。
目前對太陽光的追蹤方式有兩種:一是光電檢測追蹤,二是視日運動軌跡跟蹤[2-3]。光電檢測追蹤的追蹤精度高,但可靠性及穩定性低。視日運動軌跡跟蹤的追蹤精度低,但可靠性及穩定性高。在現有的自動追光系統中,通常采用多光電二極管來感受光強,整個系統也存在著結構設計復雜等問題。
針對以上問題,本文以光電檢測追蹤原理為基礎,提出了一種基于光敏電阻的自適應追光系統,并進行硬件以及軟件的設計方案,對追蹤太陽光的光敏電阻分布進行優化,并予以實現,其具有結構簡單易于實現、穩定性好等特點。
1 總體方案設計
自適應追光系統的總體設計包括系統的硬件設計以及軟件設計,采用基于負反饋的自適應追光原理,整個裝置的原理如圖1所示。
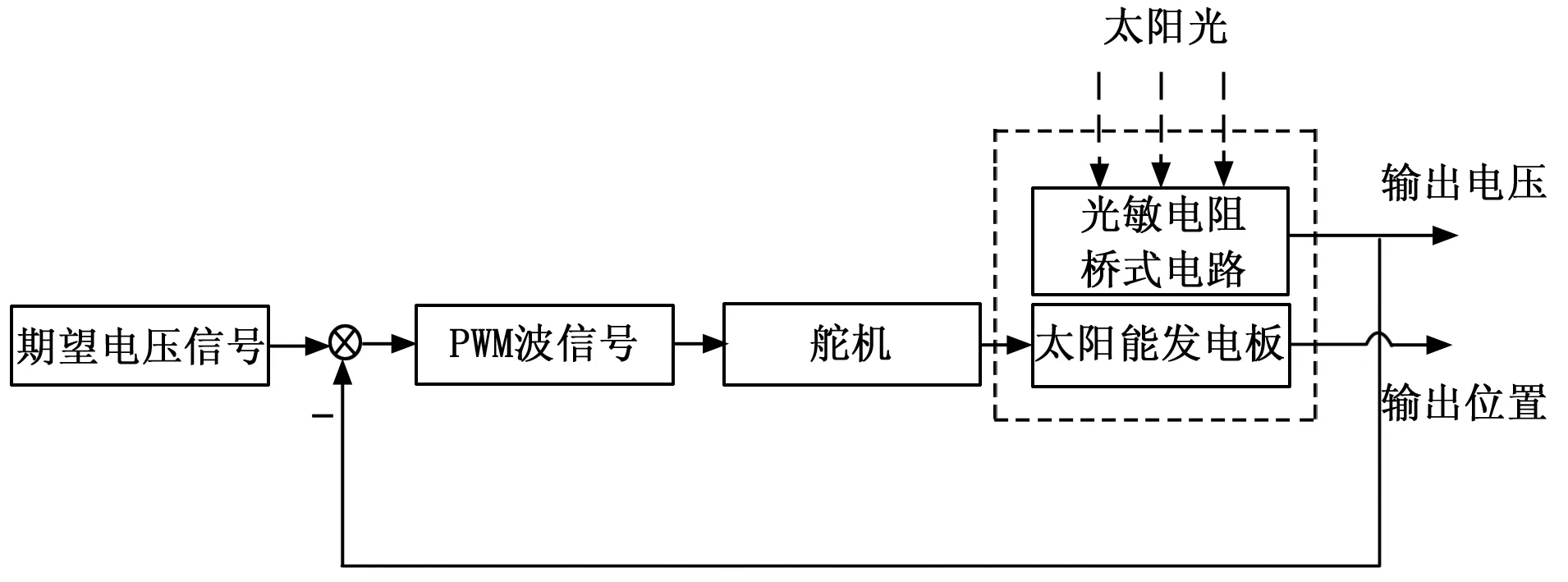
圖1 自適應追光系統結構圖
圖1中追光系統的主要工作原理為:通過51單片機對追蹤光板上水平和豎直方向兩組光敏電阻壓差信號的處理,并與期望電壓作比較,產生相應的PWM波來驅動舵機,進而帶動追蹤太陽能發電板(以下簡稱追光板)在水平以及豎直兩個方向轉動,最終使光敏電阻壓差信號會隨著光板對光點的追蹤而減小,直至追蹤到光點,達到最終位置。
2 系統硬件設計
系統的硬件包含3個部分:硬件電路設計、追光機械結構設計和追光板光敏電阻分布設計。
硬件電路設計實現對整個系統的控制,主要是對舵機的控制,從而實現自適應追光;追光機械結構設計實現整個裝置的構建,是實現硬件電路控制的基礎,同時又與硬件電路設計聯系,考慮實際裝置應有的機械元件;追光板光敏電阻分布設計實現自適應追光的最優化,通過板面角度的設計問題,來實現追光的精度以及追光區域的最優化。
2.1 硬件電路設計
硬件電路設計依據總體方案下系統的基本原理進行設計,主要為控制電路的設計。
硬件控制電路部分包括51單片機最小系統、AD芯片、舵機、光敏電阻橋式電路。硬件電路設計原理,可以看做是單片機對信號的采集、變換和控制等過程,如圖5所示。

圖2 硬件電路信號變化過程圖
硬件電路的信號變化過程如下:太陽光信號經過光敏電阻橋式電路轉變為電壓信號,電壓信號經過AD采集為數字信號,數字信號經過51單片機轉變為舵機的控制信號:PWM信號,最終轉變為舵機的轉動信號。
實驗過程中對光敏電阻大小的測量,我們通過實驗改變光強的大小,得出電阻變化范圍如表1所示。

表1 光敏電阻阻值變化表
光強大小的改變是通過太陽光不照射光敏電阻、斜射以及直射光敏電阻3種情況來實現的,分別測量3種情況下的光敏電阻大小。可以看出光敏電阻的阻值隨著光強變化相對不是特別大,因此在追光過程中需要提高AD的分辨率,才能更加準確地追蹤太陽光。在實物中,我們采用8位AD來轉換電壓。
2.2 追光機械結構設計
追光機械結構的設計包含所有部件的位置以及空間構型以及幾何尺寸的大小設計。機械結構裝置應保證追光板在水平和豎直兩個方向上的轉動,傳動裝置可以用齒輪和傳送帶,通過舵機或者電機來驅動轉動。對于小模型裝置可選擇舵機進行驅動,對于大的裝置需要功率大的電機來驅動轉動。同時為保證整個機械裝置的穩定性,水平舵機下增加底座。機械裝置設計圖及實物如圖3和圖4所示。
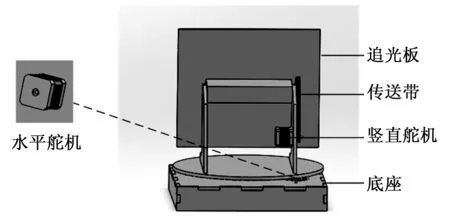
圖3 追蹤光點系統機械裝置設計圖
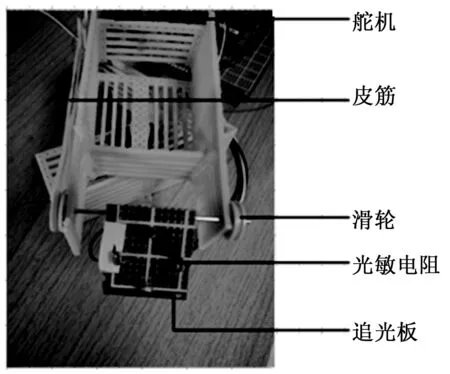
圖4 追蹤光點系統機械裝置物理實現圖
其中圖3為實際工作的機械結構圖,圖4為制作調試的小模型,用于代碼調試以及檢測實際追光系統的性能。
2.3 追光板光敏電阻分布設計
追光板光敏電阻的分布設計主要為光敏電阻與板面夾角的優化設計問題。具體設計方案如下:
圖5所示為三維坐標系下追光板以及光敏電阻位置分布的模型。光敏電阻在追光板上呈對稱分布,可假設其與追光板夾角為,表示為最優傾斜角。最優的傾斜角與以下兩個指標有關。一是可控的追光區域(表示追光前追光板的法線與軸夾角,滿足可控的最大角度(即可以追光的最大角度,與有關);二是追光的誤差(表示追光完成時追光板平面的法線與太陽光線的角度,與有關)。由于二者的不一致性,導致一項指標改善時,另一項指標會變差。所以存在最優傾斜角,滿足公式(1)中opt最大(opt為優化目標)。
opt=λθ(α)+η/δ(α)
(1)
其中:α和η分別表示θ和δ的歸一化權重系數,代表著θ和δ的重要性程度。并且θ和δ具有不一致性,需要對δ取倒數。最終對α進行遍歷,可求出最優解。
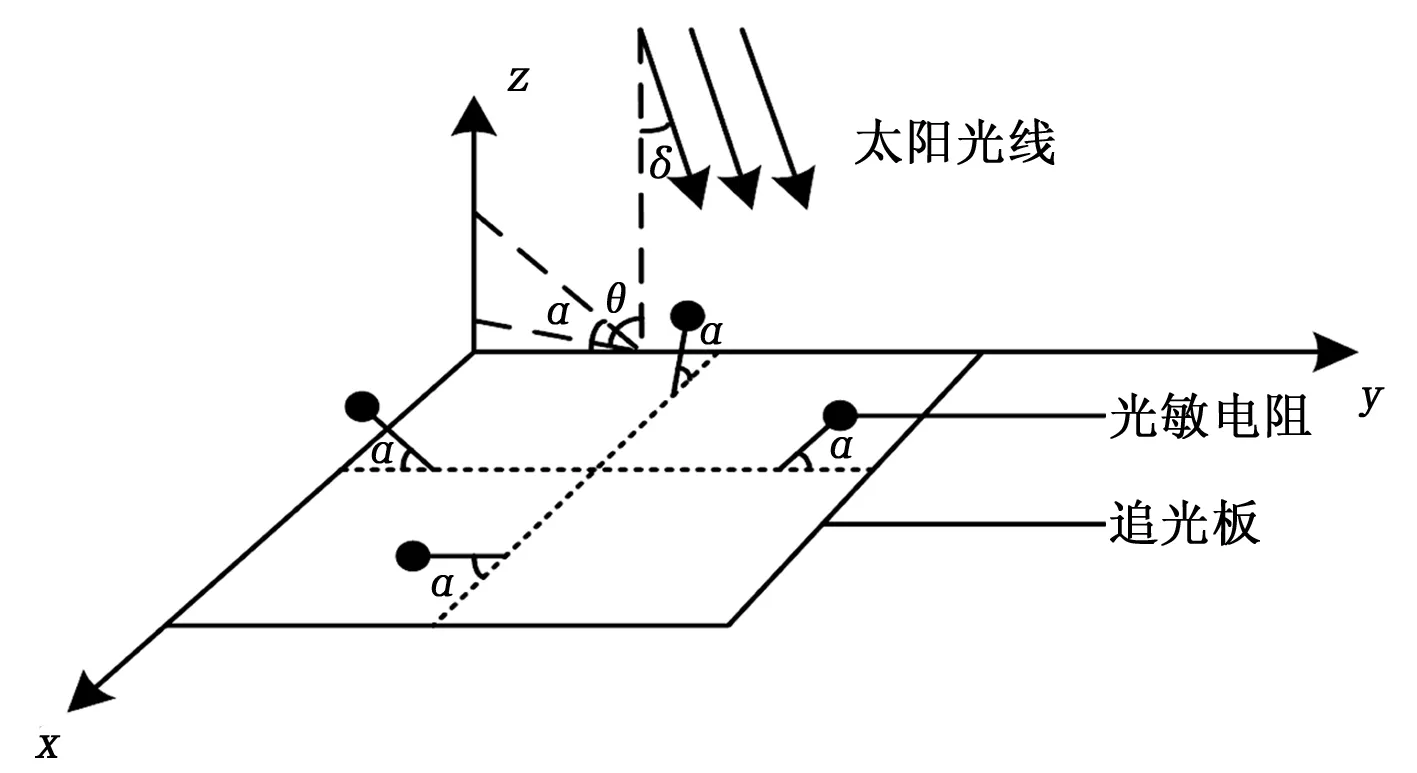
圖5 追光板上光敏電阻分布圖
考慮實際情況下對整個裝置的測試,4個光敏電阻的分布大致和板面成45°時為一個相對最優解,其原理解釋如下:
如圖6所示,此時4個光敏電阻的分布大致和板面成45°,如果太陽光從左上角45°的角度直射過來,左側的光敏電阻是正對著太陽光,但是右側的光敏電阻是背對太陽光。所以這一組光敏電阻,它們的阻值相差很大,導致收集到電壓和期望電壓相比差別很大,可以控制舵機調整接收板的角度,使它朝向太陽,調節效果好。
而當光敏電阻與太陽能發電板夾角為0°時,會造成追光板結束追光后,其板面法線方向與光線方向成較大角度,追光的誤差大、效果差。
而當光敏電阻垂直于發電板板面即與板面成90°時,追光區域范圍會縮小,追光效果也差。
綜上所述,當4個光敏電阻的分布和板面成0~90°中間一適宜值時可以保證追光板在追光區域以及追光的精度的指標達到相對最優,指標符合要求。
圖6 追光板結構圖
3 系統軟件設計
系統軟件設計是基于系統硬件電路來設計的。包含著信號采集,轉化與控制過程中的程序設計。同時在設計代碼過程中需考慮可維護性以及高效性。
軟件設計主要包括電壓信息AD采集以及驅動舵機轉動兩個過程。在軟件實現過程中主要考慮3個方面:AD采集與數據處理、舵機控制和死區消抖。軟件流程如圖7所示。
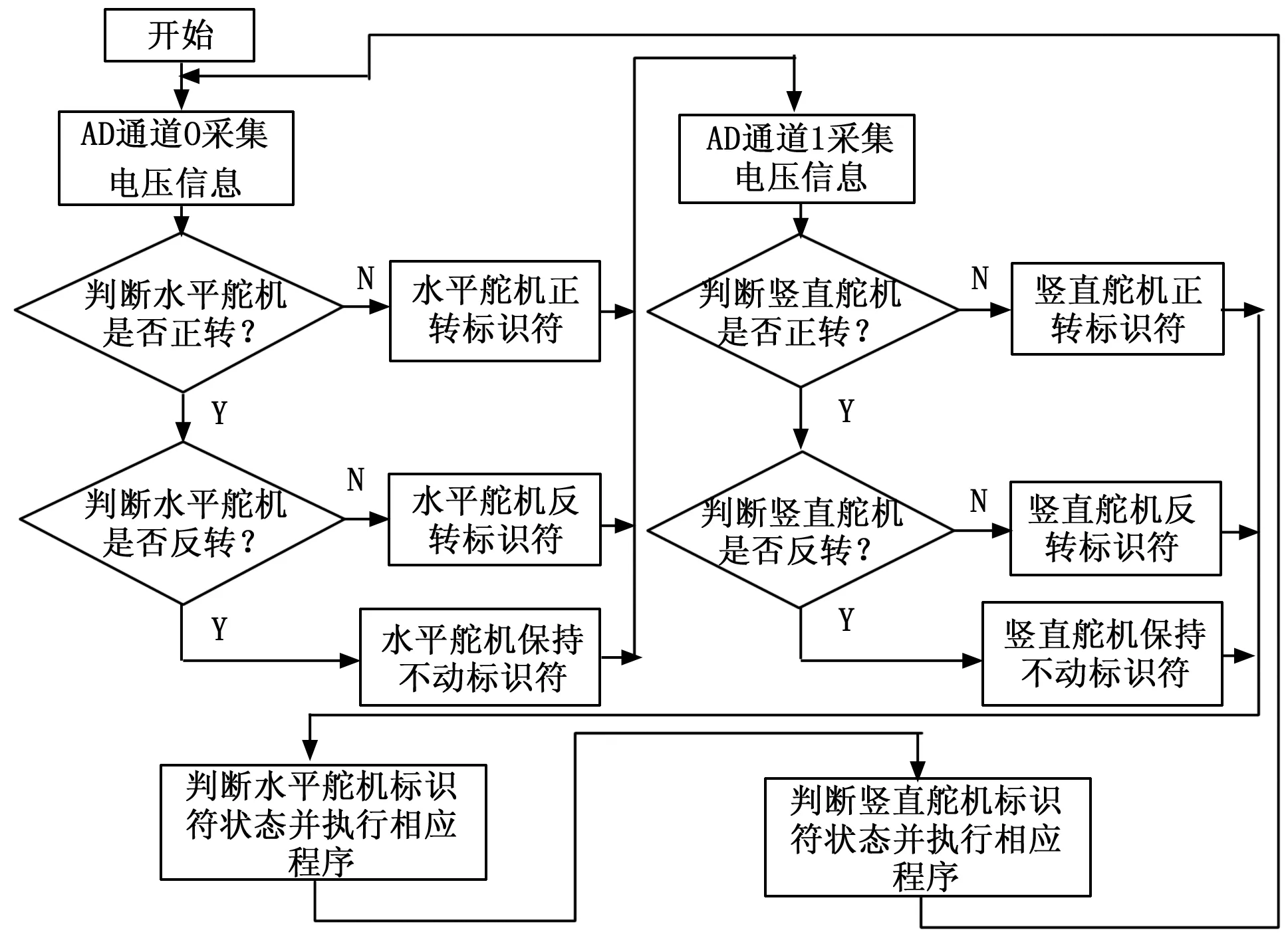
圖7 自適應追蹤光點軟件流程圖
圖7中所描述的軟件設計實現思路如下:因為整個系統的輸入信號是太陽光的位置,利用橋式電路將其轉換為壓差信號,通過軟件編程,利用這一信號判斷舵機轉動的狀態是正轉還是反轉或者停止運動,再控制舵機相應運動一個角度。然后重復判斷舵機轉動的狀態,直至達到期望目標,即追光板平面與太陽光線處于垂直狀態。同時考慮處于兩個方向上對光線的追蹤,即軟件設計中包括對水平舵機和豎直舵機的控制,所以一次循環,追光板的轉動兩次,對應水平舵機和豎直舵機各轉動一個角度。
1)AD采集:采用AD0832串行轉換數據,將光敏電阻分壓得到的電壓值轉換成數字值。
2)舵機控制:采用SG90舵機實現追光板的轉動,SG90的轉動和PWM波有關。利用AD采集的數字值與期望電壓所對應的參考值比較得出舵機的轉動方向,產生相應的PWM波,驅動舵機轉動。SG90舵機具體工作原理如下:
舵機角度的控制一般需要一個20 ms左右的時基脈沖,該脈沖的高電平部分一般為0.5~2.5 ms范圍內可調。以180度角度伺服為例,對應的控制關系如表2所示。

表2 舵機控制線特性表
3)死區消抖:在控制過程中,當AD給出的采集電壓大于期望電壓時,驅動裝置轉向使采集電壓減小的一側;當AD所采集到電壓小于期望電壓時,則反之,以此來實現對太陽光的追蹤功能。但舵機控制精度所限,在穩定位置處,裝置會出現非常劇烈的抖動現象。本文所采用的舵機每次轉動的角度是3°,在穩定位置附近處,會出現舵機轉動一次之前采集到的電壓值與期望電壓相比偏大,舵機轉動后采集到的電壓值與期望電壓相比偏小,這樣就會出現裝置在期望位置附近不斷地來回抖動。如圖8所示,其中v表示舵機速度,U表示采集的電壓,通過給定期望電壓為一死區區間范圍,即讓采集的電壓大于死區上限閾值電壓Uth+,追光板轉動;采集的電壓小于死區下限閾值電壓Uth-,追光板向相反方向轉動。這樣便可以保證裝置不會在穩定位置處抖動,由于死區區間比較小,因此又不會影響追光板正對太陽。
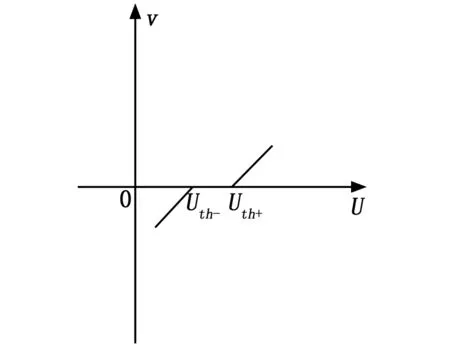
圖8 死區消抖原理示意圖
4 系統仿真驗證
系統的仿真是在Simulink下實現對電機的閉環控制穩定性的仿真。
在Simulink中搭建了圖1的電機仿真模型如圖9所示,這里以一個轉動方向上電機旋轉的位置控制仿真為例。其中測量的電機參數包含位置、電機及轉速,并以電機的位置進行負反饋控制。圖9中的伺服電機[8]的詳細數學模型如圖10所示。
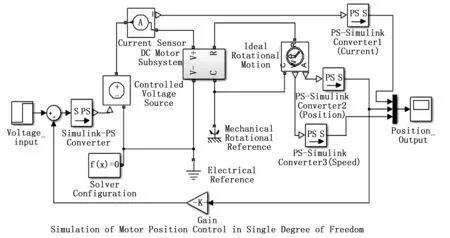
圖9 單自由度方向上伺服電機位置控制仿真圖
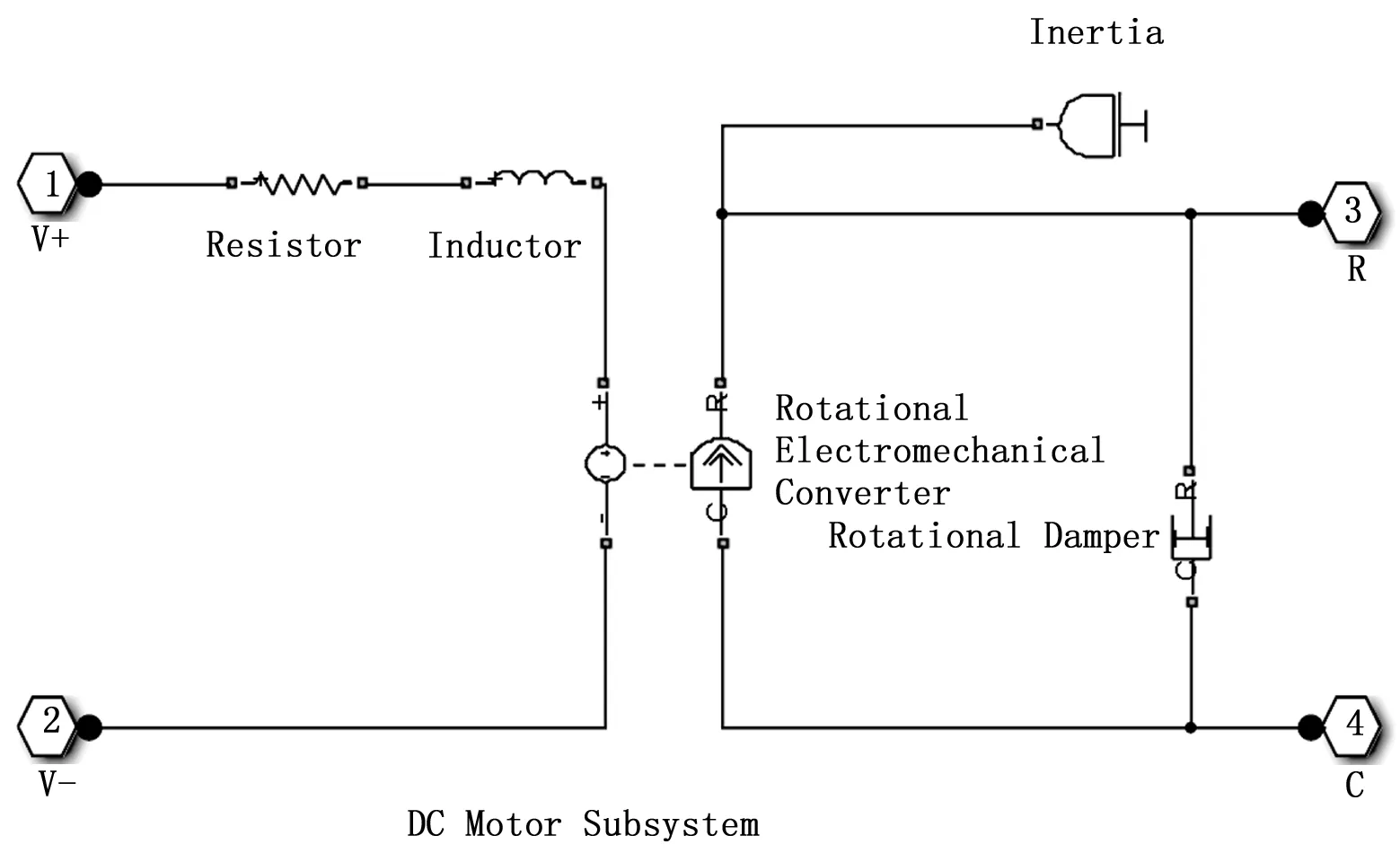
圖10 伺服電機數學模型圖
圖10中采用Simulink中S-PS和PS-S模塊實現物理信號與仿真信號的變換,來對電機中參數進行仿真。通過給定一個期望輸入信號,觀測電機輸出響應過程,包含電機的位置響應,內部電流響應以及速度響應,其仿真步驟如下:
1)初始化電機參數,包含電機轉動慣量,內部電阻,電感參數,選取合適值。
2)設定反饋量即當前電機位置量與測量電壓之間的映射表。
3)給定輸入電壓的給定值,這里以單位階躍為例。
4)進行仿真,用示波器顯示電機的位置響應,內部電流響應以及速度響應,具體響應曲線如圖11所示。
由圖11可以看出,閉環控制下系統處于穩定狀態,可以通過改變輸入量較好的控制好伺服電機的轉動位置。所以在實際情況下通過控制兩個電機,分別處于兩個自由度下,便可以實現太陽能板對太陽光點的追蹤。
5 結論
1)與現有的多光電二極管追光原理相比,此類利用光敏電阻與追光板的夾角來提高追光精度的方式,裝置設計更加容易,追光的穩定性會有所提高。
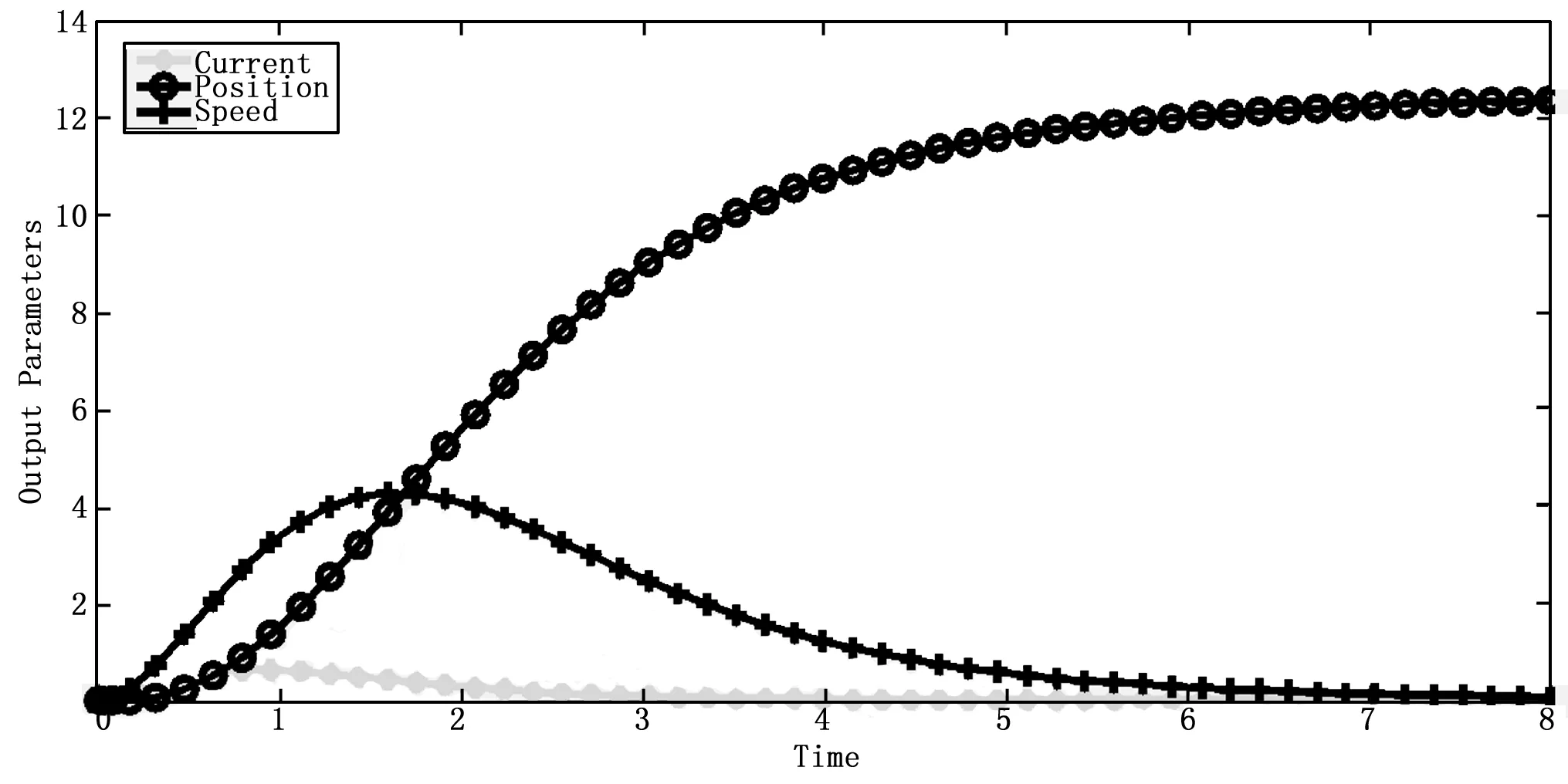
圖11 系統輸出響應圖
2)通過程序控制追光的裕度,來控制追光的誤差,使得整個裝置在追蹤到光點的時候不至于抖動,有利于延長裝置的使用壽命。
3)基于負反饋的自適應追光裝置的穩定性會有所提高,同時對于追光的精度也達到一定的要求。
4)Simulink下實現對電機轉動的穩定控制,可以從原理上驗證系統的穩定性。
[1] 陳 維, 李戩洪. 太陽能利用中的跟蹤控制方式的研究[J]. 能源工程, 2003(03): 18-20.
[2]王 濤. 基于光敏感應及角度計算的太陽追蹤系統的設計與實現[D]. 成都: 電子科技大學, 2009.
[3]王 旭, 肖廣朋, 康留旺.基于MC9S12DG128的太陽能自動追蹤裝置[J]. 汽車使用技術, 2013(12): 54-58.
[4]薛建國. 基于單片機的太陽能電池自動跟蹤系統的設計[J]. 長春師范學院學報, 2005, 24(3): 26-30.
[5]默少麗, 王鵬月. 太陽自動跟蹤控制系統的設計[J]. 實驗室研究與探索, 2012, 31(12): 83-85.
[6]周詩悅, 朱 凱, 劉 爽. 太陽能電池板自動跟蹤系統[J]. 控制工程, 2009, 增刊: 18-19.
[7]王艷穎, 王 珍, 郭麗環. 直流電動機傳遞函數測定的實驗研究[J]. 實驗技術與管理, 2008, 25(8): 39-40.
[8]潘曉晟, 郝世勇. Matlab電機仿真精華50例[M]. 北京: 電子工業出版社, 2007.
DesignandImplementationofAdaptiveTrackingSystemforSolarPhotovoltaicandThermoelectricPanels
Fu Kaixin1, Peng Kai1, Cheng Siyuan1, Liu Junjie2, Zhou Dongtao3
(1. School of Power and Energy, Northwestern Polytechnical University, Xi′an 710072, China2. School of Materials Science and Engineering, Northwestern Polytechnical University, Xi′an 710072, China3. School of Mechanical and Electrical Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
In a small solar photovoltaic and thermoelectric system, automatic tracking system is often used in order to improve the efficiency of power generation. An optimal design of the structure of photosensitive resistance and tracking panels for the current adaptive tracking system is presented. An adaptive tracking system based on photosensitive resistance is proposed due to the complication of structure of automatic tracking system based on photodiode. In order to achieve tracking the target, the adaptive tracking principle based on negative feedback is used. Through software design, tracking accuracy is controlled with adding the anti-shake control system. In terms of hardware designing, photosensitive resistance is used to induce intensity of light. And AD conversion circuit and steering engine are applied. Ultimately the solar photovoltaic and thermoelectric panel is driven to move until the panel is perpendicular to the sun light. In addition, the optimal design of structure of the panels is considered to adjust the area of tracking. Finally, the mechanical structure design of the whole device, the design and simulation of circuit diagram are implemented. The results show that the design of the mechanical device is simpler and easier to actualized while compared with the existing photoelectric diode spot-tracking system and the tracking stability is improved.
adaptive tracking; photosensitive resistance distribution; optimal design; tracking stability
2017-04-12;
2017-05-06。
國家自然科學基金(51506176)。
傅開新(1996-),男,安徽宣城人,大學生,主要從事控制科學與工程方向的研究。
1671-4598(2017)10-0224-04
10.16526/j.cnki.11-4762/tp.2017.10.057
TP273
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17