Ka頻段飛行器測(cè)控與通信系統(tǒng)設(shè)計(jì)
2017-11-03 02:59:54,,,
計(jì)算機(jī)測(cè)量與控制 2017年10期
,, ,
(空間物理重點(diǎn)實(shí)驗(yàn)室,北京 100076)
Ka頻段飛行器測(cè)控與通信系統(tǒng)設(shè)計(jì)
邱長(zhǎng)泉,袁延榮,施睿,李萌
(空間物理重點(diǎn)實(shí)驗(yàn)室,北京100076)
傳統(tǒng)基于S頻段的統(tǒng)一載波測(cè)控通信系統(tǒng)受工作頻率低、占用頻帶窄的特點(diǎn)限制,無法滿足現(xiàn)代及未來飛行器測(cè)控與通信系統(tǒng)對(duì)于高速數(shù)傳、通信帶寬、安裝空間、克服“黑障”及抗干擾性等方面日益增長(zhǎng)的需求,提出一種Ka頻段直接序列擴(kuò)頻體制的飛行器測(cè)控與通信系統(tǒng)以解決上述問題;利用Ka頻段頻帶寬、空間選擇性好、減小“黑障”影響等特點(diǎn),同時(shí)采用直接序列擴(kuò)頻通信體制實(shí)現(xiàn)遙測(cè)、外測(cè)和遙控等不同功能點(diǎn)頻統(tǒng)一和信道統(tǒng)一,簡(jiǎn)化系統(tǒng)結(jié)構(gòu)、減小設(shè)備體積;介紹了系統(tǒng)架構(gòu)及主要設(shè)備組成,闡述了基帶數(shù)據(jù)綜合設(shè)備、Ka頻段一體化終端設(shè)備等單機(jī)的詳細(xì)設(shè)計(jì)及天線的選擇,并給出了地面測(cè)試系統(tǒng)方案;該系統(tǒng)具備體積小、頻帶寬、擴(kuò)展性好等特點(diǎn),可滿足未來飛行器測(cè)控與通信系統(tǒng)的設(shè)計(jì)與應(yīng)用需求。
Ka頻段;測(cè)控與通信;直接序列擴(kuò)頻;飛行器
0 引言
測(cè)控與通信系統(tǒng)是宇航系統(tǒng)各類運(yùn)載器、飛行器信息保障的基礎(chǔ),在信息傳輸、遙測(cè)遙控、測(cè)軌定位、監(jiān)視偵察、預(yù)警探測(cè)等方面具有極其重要的戰(zhàn)略意義和軍事價(jià)值。隨著現(xiàn)代飛行器技術(shù)的發(fā)展,特別是著眼于未來,傳統(tǒng)的測(cè)控與通信系統(tǒng)如S頻段統(tǒng)一載波測(cè)控通信系統(tǒng),越來越無法滿足飛行器日益增長(zhǎng)的對(duì)高速數(shù)傳、通信帶寬、安裝空間、克服“黑障”及抗干擾性等方面的需求,且受ITU分配的新型移動(dòng)業(yè)務(wù)、固定業(yè)務(wù)影響,如IMT-4G(第四代移動(dòng)電視)、FSS(固定衛(wèi)星業(yè)務(wù))等都有可能對(duì)現(xiàn)有的遙測(cè)頻段造成威脅,提高工作頻段、增大工作頻帶是必然的選擇[1-2]。近年來,美國國家航空航天局(NASA)及歐空局(ESA)紛紛規(guī)劃由S頻段向更高頻段如X頻段、Ka頻段、Ku頻段轉(zhuǎn)移的計(jì)劃,我國在載人航天空間試驗(yàn)室和空間站、深空探測(cè)、再入飛行等諸多領(lǐng)域需求的推動(dòng)下,也逐步向更高頻段轉(zhuǎn)移[3],以建立容量更大、頻帶更寬、天地互通、軍民一體的測(cè)控通信網(wǎng)。
基于上述背景,本文提出了一種基于Ka頻段直接序列擴(kuò)頻(DSSS)體制的飛行器測(cè)控與通信系統(tǒng),介紹了系統(tǒng)架構(gòu)及主要設(shè)備組成,闡述了基帶數(shù)據(jù)綜合設(shè)備、Ka頻段一體化終端設(shè)備等單機(jī)的詳細(xì)設(shè)計(jì)及天線的選擇,介紹了采用的關(guān)鍵技術(shù),并給出了地面測(cè)試方案。
1 系統(tǒng)設(shè)計(jì)的考慮
1.1 頻段選擇
頻段的選擇主要考慮帶寬、抗干擾及技術(shù)成熟度等方面。Ka頻段的特點(diǎn)包括:相對(duì)傳統(tǒng)S頻段具有較寬的頻帶,可提高飛行器測(cè)控與通信系統(tǒng)的數(shù)傳能力;具有波束窄、空間選擇性好的特點(diǎn),可提高飛行器測(cè)控與通信系統(tǒng)抗干擾能力[1];Ka頻段通信相關(guān)器件如固態(tài)功放、低相噪頻綜等成熟度越來越高,應(yīng)用日益廣泛;結(jié)合互通互連的Ka頻段天基、地基測(cè)控與通信網(wǎng)資源,可有效增加飛行器測(cè)控與通信的可靠性和覆蓋范圍,特別是利用天基中繼衛(wèi)星的情況下,可實(shí)現(xiàn)全球飛行全過程監(jiān)控。此外,Ka頻段通信還具有減小“黑障”影響、設(shè)備重量小、電磁兼容性好等優(yōu)點(diǎn)。
1.2 通信體制選擇
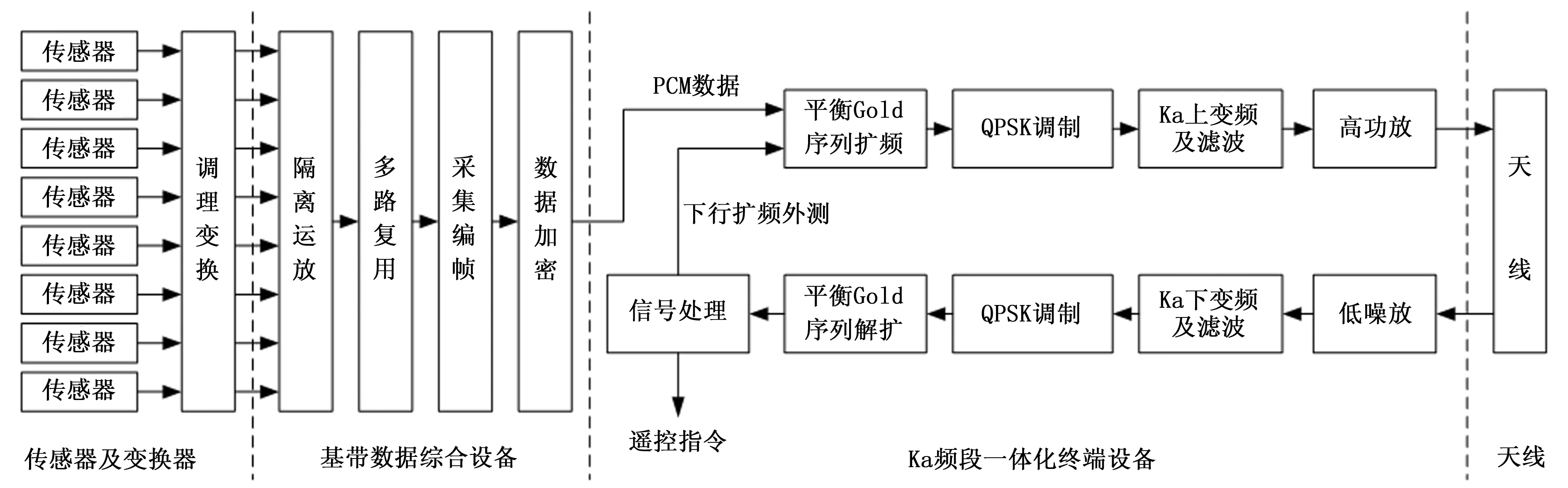
圖1 Ka頻段測(cè)控與通信系統(tǒng)架構(gòu)圖
傳統(tǒng)飛行器測(cè)控與通信系統(tǒng),其通信體制常采用PCM-FM遙測(cè)、相參脈沖或連續(xù)波外測(cè)、PCM-DPSK-FM或主字母遙控[4-6],或采用統(tǒng)一載波實(shí)現(xiàn)數(shù)傳、遙測(cè)、外測(cè)等功能[7],隨著飛行器小型化、輕質(zhì)化發(fā)展的相關(guān)需求,受飛行器上安裝空間、整機(jī)質(zhì)量等條件的約束,要求測(cè)控與通信設(shè)備實(shí)現(xiàn)小型化、輕質(zhì)化,必須采用統(tǒng)一的通信體制。擴(kuò)頻通信具有多址通信、抗干擾性強(qiáng)、保密性好、抗衰落、抗多徑等特點(diǎn)[8],特別是多址通信的特點(diǎn),可實(shí)現(xiàn)飛行器測(cè)控與通信系統(tǒng)多種功能點(diǎn)頻統(tǒng)一、信道統(tǒng)一,大大簡(jiǎn)化設(shè)備結(jié)構(gòu)、降低系統(tǒng)復(fù)雜度,同時(shí)考慮到相同技術(shù)指標(biāo)下QPSK相對(duì)BPSK,前者傳輸帶寬僅為后者一半,因此選擇基于QPSK的直接序列擴(kuò)頻系統(tǒng)作為通信體制。
2 飛行器測(cè)控與通信系統(tǒng)設(shè)計(jì)
2.1 總體方案
基于Ka頻段直接序列擴(kuò)頻體制的飛行器測(cè)控與通信系統(tǒng)架構(gòu)如圖1所示,該系統(tǒng)具備遙測(cè)、外測(cè)、遙控等多種功能。其中,遙測(cè)功能將溫度、壓力等多種傳感器參數(shù)采集、編幀、加密后形成PCM數(shù)據(jù)流,該數(shù)據(jù)流經(jīng)擴(kuò)頻調(diào)制、QPSK調(diào)制、Ka頻段上變頻、高功率放大后傳輸至天線通過無線電波輻射;外測(cè)功能完成地面站上行測(cè)量幀的接收、解析并延遲轉(zhuǎn)發(fā)至地面,地面站根據(jù)上行測(cè)量幀、下行測(cè)量幀間傳播延遲的測(cè)量完成非相干測(cè)距、測(cè)速的計(jì)算;遙控功能通過外測(cè)上行測(cè)量幀中的特殊標(biāo)識(shí)碼實(shí)現(xiàn),通過信號(hào)處理后形成遙控指令發(fā)送至飛行器中的執(zhí)行機(jī)構(gòu)。
與傳統(tǒng)飛行器測(cè)控與通信系統(tǒng)相比,該系統(tǒng)的特點(diǎn)包括:a)集成度高,設(shè)備數(shù)量少且設(shè)備體積小;b)寬頻帶,采用基于Ka頻段的QPSK體制理論上最高可獲得上吉的傳輸容量;c)采用直接序列擴(kuò)頻通信,保密性強(qiáng);d)采用Ka頻段通信可減小“黑障”的影響;e)擴(kuò)展性好,兼容天基、地基通信網(wǎng)絡(luò),易于實(shí)現(xiàn)多目標(biāo)測(cè)量并實(shí)現(xiàn)天地互通測(cè)控通信。
2.2 設(shè)備組成
Ka頻段測(cè)控與通信系統(tǒng)設(shè)備采用集成化、一體化設(shè)計(jì)原則,以減小設(shè)備體積。如圖1所示,具體設(shè)備包括傳感器、變換器、基帶數(shù)據(jù)綜合設(shè)備、Ka頻段一體化終端設(shè)備、天線等。
2.2.1 傳感器及變換器
傳感器類型包括溫度、壓力、振動(dòng)、沖擊、過載、噪聲、應(yīng)變、行程等,變換器完成傳感器輸出信號(hào)放大(或縮小)、非線性特性線性化后形成規(guī)范化、統(tǒng)一化的電平信號(hào),信號(hào)范圍0~10 V。由于不同類型傳感器的原理、特性不同,因此變換器必須選擇與傳感器特性相匹配的電路,常用變換器有小信號(hào)放大器、低漂移直流放大器、高輸入阻抗放大器、電荷放大器、光電轉(zhuǎn)換放大器等。經(jīng)變換器調(diào)理后的信號(hào),傳輸、匯流于基帶數(shù)據(jù)綜合設(shè)備。
2.2.2 基帶數(shù)據(jù)綜合設(shè)備
基帶數(shù)據(jù)綜合設(shè)備如圖2所示,該設(shè)備具備信號(hào)隔離、阻抗變換、數(shù)據(jù)編幀、數(shù)據(jù)加密、平行延遲等功能,同時(shí)具備RS422、CAN及1553B總線接口。傳感器輸出的模擬量信號(hào)經(jīng)調(diào)理、變換進(jìn)入數(shù)據(jù)綜合采集設(shè)備,通過隔離運(yùn)放、多路復(fù)用開關(guān)后,利用1:1電壓跟隨器完成阻抗變換,并經(jīng)高精度AD采集編碼送至數(shù)據(jù)綜合FPGA;另外,對(duì)于某些高精度傳感器、遠(yuǎn)置采編單元設(shè)備,在本地完成數(shù)據(jù)采集后可以通過總線接口直接送至數(shù)據(jù)綜合FPGA。數(shù)據(jù)綜合FPGA支持多種采樣率,對(duì)模擬量參數(shù)、CAN總線、RS422總線和1553B總線參數(shù)進(jìn)行挑路、編幀后形成遙測(cè)數(shù)據(jù)幀,遙測(cè)數(shù)據(jù)幀字長(zhǎng)支持8bit、12bit和16bit,具備主幀同步、副幀同步和幀計(jì)數(shù)等功能。全幀數(shù)據(jù)生成后以串行碼流方式送至數(shù)據(jù)加密FPGA,完成數(shù)據(jù)加密后形成串行差分PCM數(shù)據(jù)送至Ka頻段一體化終端設(shè)備。
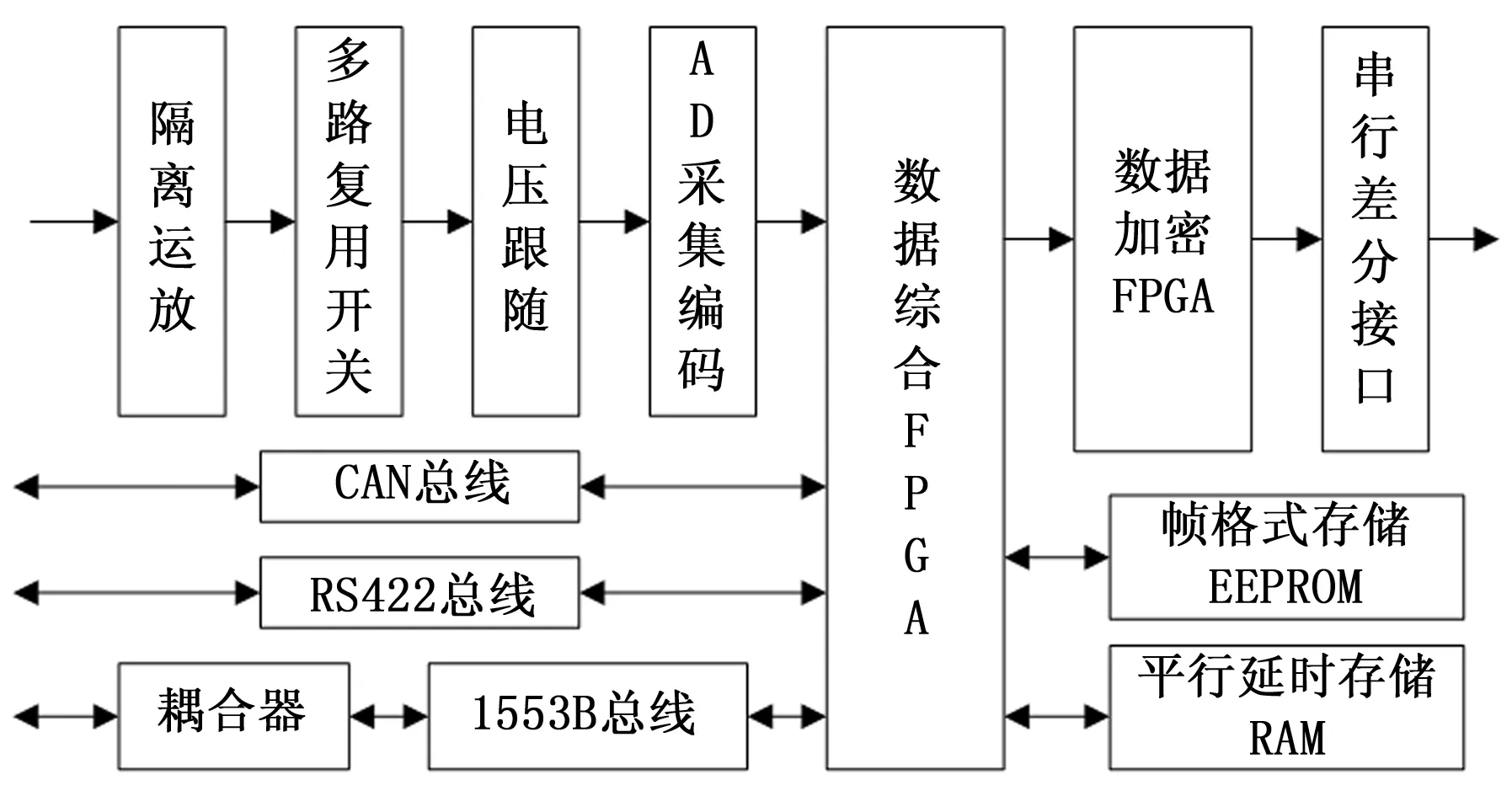
圖2 基帶數(shù)據(jù)綜合設(shè)備構(gòu)成
此外,基帶數(shù)據(jù)綜合設(shè)備支持平行延遲存儲(chǔ)功能,通過專用平行延遲存儲(chǔ)RAM實(shí)現(xiàn),對(duì)于同時(shí)采用實(shí)時(shí)傳輸、平行延時(shí)傳輸?shù)闹匾獢?shù)據(jù),數(shù)據(jù)綜合FPGA可通過平行延時(shí)存儲(chǔ)RAM完成遙測(cè)幀中平行延遲波道數(shù)據(jù)的存儲(chǔ)、延時(shí)編幀,通過延時(shí)波道提高重要遙測(cè)數(shù)據(jù)獲取的可靠性。
2.2.3 Ka頻段一體化終端設(shè)備
Ka頻段一體化終端設(shè)備基于中頻帶通采樣數(shù)字化架構(gòu),通過軟件無線電實(shí)現(xiàn),如圖3所示,具有架構(gòu)簡(jiǎn)單、使用靈活的特點(diǎn),且大大降低了對(duì)AD采樣速率、工作帶寬、采樣精度、動(dòng)態(tài)范圍等要求,工程上易于實(shí)現(xiàn)。
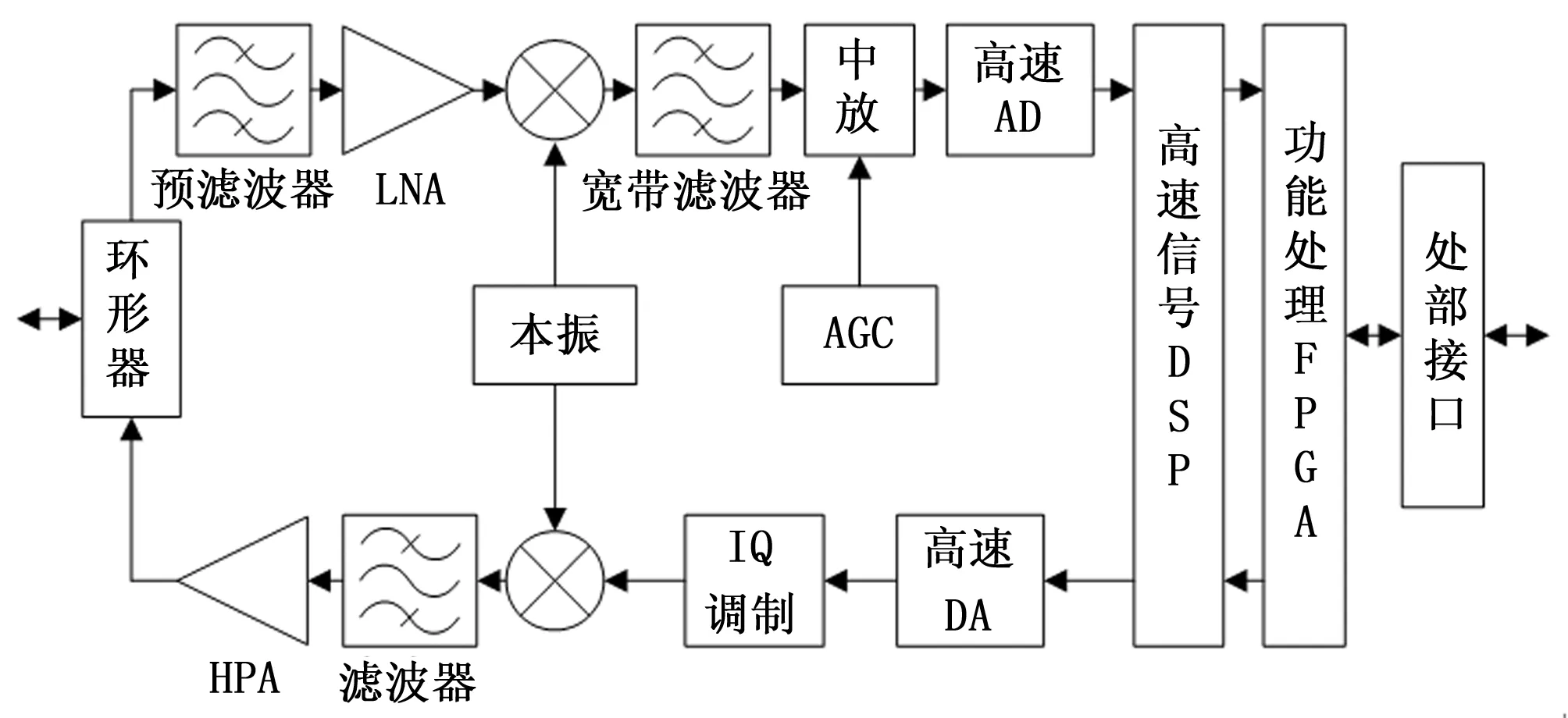
圖3 Ka頻段一體化終端設(shè)備構(gòu)成
地面上行信號(hào)經(jīng)天線接收后,通過射頻前端的預(yù)濾波、低噪放(LNA)、下變頻、寬帶濾波后,變換為中心頻率為140 MHz、帶寬適中的中頻信號(hào),中頻信號(hào)經(jīng)高速AD采樣,由高速DSP模塊進(jìn)行信號(hào)捕獲、跟蹤、解擴(kuò)、解調(diào)等數(shù)字化處理,同時(shí)完成載波同步、碼元同步、位同步、幀同步,將解調(diào)后的數(shù)據(jù)發(fā)送FPGA進(jìn)行處理。若上行信號(hào)為外測(cè)信號(hào),經(jīng)FPGA判斷處理后,形成新的外測(cè)下行幀數(shù)據(jù),發(fā)送至高速DSP進(jìn)行擴(kuò)頻并經(jīng)正交(IQ)調(diào)制;若上行信號(hào)為遙控信號(hào),經(jīng)FPGA判斷處理后,形成遙控指令經(jīng)外部接口發(fā)送至飛行器上的執(zhí)行機(jī)構(gòu),控制飛行器執(zhí)行相應(yīng)的動(dòng)作。
飛行器下行信號(hào)除了上行外測(cè)信號(hào)的返回?cái)?shù)據(jù)幀外,還包括基帶數(shù)據(jù)綜合設(shè)備發(fā)出的串行遙測(cè)數(shù)據(jù),這些數(shù)據(jù)通過高速DSP進(jìn)行擴(kuò)頻后,經(jīng)高速DA、IQ調(diào)制、上變頻、濾波、高功率放大后送至天線輻射出去。為降低載波泄露、具有更好的頻譜特性,直接序列擴(kuò)頻選用平衡Gold碼作為偽碼。
2.2.4 天線
飛行器上常用的Ka頻段天線類型包括波導(dǎo)天線、微帶天線和介質(zhì)天線等。通常低速飛行器可選擇微帶天線、介質(zhì)天線,而高速飛行器受飛行器上力、熱環(huán)境限制,可選擇基于全金屬結(jié)構(gòu)的波導(dǎo)天線,波導(dǎo)天線的特點(diǎn)是沒有焊點(diǎn),且可通過波導(dǎo)或波同轉(zhuǎn)換器件完成微波器件的連接。該系統(tǒng)選擇波導(dǎo)天線,由于天線與終端設(shè)備間距離較短,在波導(dǎo)天線與Ka頻段一體化終端設(shè)備之間選擇同軸電纜作為傳輸線,同時(shí)為避免大雨期間Ka頻段無線圓極化波的退極化現(xiàn)象,波導(dǎo)天線選擇線極化方式。
2.3 關(guān)鍵技術(shù)
2.3.1 設(shè)備小型化
根據(jù)系統(tǒng)架構(gòu),分解、組合設(shè)備功能,主要?jiǎng)澐譃榛鶐?shù)據(jù)綜合設(shè)備和Ka頻段一體化終端設(shè)備。對(duì)于基帶數(shù)據(jù)綜合設(shè)備,采用單片SOC實(shí)現(xiàn)FPGA、ADC、電壓跟隨放大器、多路復(fù)用開關(guān)、總線接口等集成,同時(shí)采用軟硬結(jié)合PCB板(Rigid-Flex PCB)進(jìn)行電路的板級(jí)設(shè)計(jì),將電路劃分為硬板和柔板,硬板上布置主要芯片、外圍接口、供電等器件,硬板與硬板之間通過柔板進(jìn)行連接。對(duì)于Ka頻段一體化終端設(shè)備,進(jìn)行遙測(cè)、外測(cè)和遙控收發(fā)信道一體化設(shè)計(jì),通過三維電磁仿真、上/下行點(diǎn)頻組合分析確認(rèn)一體化后雜散對(duì)接收靈敏度無影響,同時(shí)對(duì)鏈路的放大、濾波、混頻及本振功率進(jìn)行合理分配、合理布置,保證一體化后設(shè)備的高線性及大動(dòng)態(tài)能力。
2.3.2 功率動(dòng)態(tài)控制
為實(shí)現(xiàn)飛行器上能源的高效利用,對(duì)系統(tǒng)中功耗較高的設(shè)備采用動(dòng)態(tài)管理減小能量消耗。根據(jù)上行外測(cè)信號(hào),終端直接獲取接收信號(hào)的信噪比,在已知地面站有效全向輻射功率(EIRP)等參數(shù)的情況下,終端可以估計(jì)出上行鏈路傳輸衰減值,包括自由空間損耗、大氣損耗、等離子體衰減、大氣折射損耗等。利用估計(jì)出的鏈路衰減值,結(jié)合飛行器自身EIRP、地面站接收G/T(品質(zhì)因數(shù))值及接收靈敏度,并預(yù)留一定的鏈路余量,即可計(jì)算出一定傳輸速率下實(shí)際需要的發(fā)射機(jī)輸出功率,據(jù)此控制線性功放電路輸出功率,達(dá)到功率動(dòng)態(tài)控制、節(jié)省能源的目的。
2.3.3 信號(hào)快速捕獲跟蹤
為具備大動(dòng)態(tài)信號(hào)的快速捕獲和跟蹤,同時(shí)降低對(duì)DSP芯片處理資源的占用,采用多通道并行部分相關(guān)和快速傅里葉變換(FFT)結(jié)合的捕獲方法。大動(dòng)態(tài)信號(hào)具有較快的多普勒頻率,將多普勒頻率范圍劃分為若干個(gè)寬度相同的頻率槽,依次遍歷所有頻率槽和偽碼相位,獲取相關(guān)峰,再在相關(guān)峰所在頻率槽及相鄰頻率槽重新搜索,在每個(gè)頻率槽內(nèi)將輸入偽碼采用多路并行相關(guān)得到各組數(shù)據(jù)序列,分別進(jìn)行快速傅里葉變換(FFT)計(jì)算,若FFT幅值最大值超過門限值,則捕獲完成,否則調(diào)整碼NCO(數(shù)控振蕩器)使本地偽碼滑動(dòng)半個(gè)碼片,重復(fù)上述過程,直到捕獲完成,開始進(jìn)行信號(hào)跟蹤。
偽碼跟蹤采用全時(shí)間超前滯后非相干碼跟蹤環(huán),環(huán)路由鑒相器、環(huán)路濾波器、壓控振蕩器和擴(kuò)頻碼生成器構(gòu)成,同時(shí)使用載波環(huán)輔助碼環(huán)跟蹤,將載波環(huán)的頻率誤差控制信號(hào)按照一定比例附加到碼NCO上,實(shí)現(xiàn)碼相位的精確跟蹤。載波跟蹤采用DLL(鎖相環(huán))和FLL(鎖頻環(huán))相結(jié)合的方式,先以FLL跟蹤殘留的多普勒頻差并將其控制在一定的范圍內(nèi),在FLL輸出保持不變的情況下,轉(zhuǎn)入DLL跟蹤,由DLL維持對(duì)動(dòng)態(tài)和殘留頻差、相差的跟蹤,以適應(yīng)信號(hào)高動(dòng)態(tài)變化的情況。
3 地面測(cè)試系統(tǒng)
Ka頻段直接序列擴(kuò)頻測(cè)控與通信系統(tǒng)地面測(cè)試系統(tǒng)架構(gòu)如圖4所示。該地面系統(tǒng)在實(shí)現(xiàn)對(duì)飛行器上測(cè)控與通信系統(tǒng)進(jìn)行測(cè)試、試驗(yàn)的同時(shí),具備自檢聯(lián)試功能。其中,Ka頻段天線組合用于遙測(cè)及外測(cè)信號(hào)接收、遙控及外測(cè)信號(hào)發(fā)送;自動(dòng)增益控制(AGC)組合對(duì)信號(hào)電平進(jìn)行自動(dòng)跟蹤及調(diào)整,使其保持在特定的范圍內(nèi);Ka頻段變頻組合將Ka頻段信號(hào)下變頻至S頻段信號(hào)或?qū)頻段信號(hào)上變頻至Ka頻段信號(hào);光調(diào)制解調(diào)組合完成射頻信號(hào)光調(diào)制或光解調(diào),用于遠(yuǎn)距離測(cè)試場(chǎng)合;射頻耦合網(wǎng)絡(luò)實(shí)現(xiàn)S頻段射頻信號(hào)的分路及合路;擴(kuò)頻綜合基帶產(chǎn)生上行遙控信號(hào)及外測(cè)信號(hào),接收處理下行遙測(cè)信號(hào)及外測(cè)信號(hào)。Ka頻段標(biāo)校天線、聯(lián)試自檢基帶等由于系統(tǒng)測(cè)試前的自檢測(cè)。
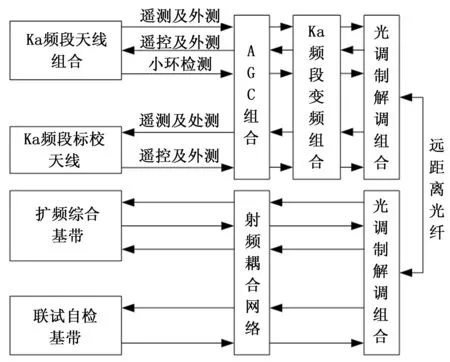
圖4 地面測(cè)試系統(tǒng)架構(gòu)
4 總結(jié)
測(cè)控與通信技術(shù)是飛行器信息保障的基礎(chǔ),未來測(cè)控與通信技術(shù)將向更高頻段轉(zhuǎn)移,以增加頻帶寬度、提升系統(tǒng)容量。本文提出了一種基于Ka頻段直接序列擴(kuò)頻體制的飛行器測(cè)控與通信系統(tǒng)及地面測(cè)試方案,實(shí)現(xiàn)了遙測(cè)、外測(cè)、遙控等功能,采用了設(shè)備小型化、功率動(dòng)態(tài)控制、信號(hào)快速捕獲跟蹤等關(guān)鍵技術(shù),該系統(tǒng)具備體積小、頻帶寬、保密性強(qiáng)、擴(kuò)展性好等特點(diǎn),可以滿足未來飛行器尤其是小型化飛行器測(cè)控與通信的應(yīng)用需求。隨著各類飛行器的研制和部署,測(cè)控與通信技術(shù)也將不斷更新、發(fā)展,并將促進(jìn)Ka頻段測(cè)控與通信系統(tǒng)及相關(guān)技術(shù)的不斷發(fā)展和廣泛部署。
[1] 劉嘉興. 再論發(fā)展Ka頻段測(cè)控通信網(wǎng)的思考[J]. 電訊技術(shù), 2008, 12: 90-97.
[2] 郭 凱. 航天遙測(cè)技術(shù)現(xiàn)狀及發(fā)展思考[J]. 遙測(cè)遙控, 2015, 9:7-15
[3] 胡建平, 孫德福,等. Ka頻段寬帶測(cè)控通信與抗干擾技術(shù)探討[J]. 飛行器測(cè)控學(xué)報(bào), 2009, 2: 27-31.
[4] 孫雪峰, 王志有,等.新型航天遙測(cè)信號(hào)調(diào)制解調(diào)技術(shù)[J]. 測(cè)試技術(shù)學(xué)報(bào), 2016, 30(1): 34-39.
[5] 吳立勛. 外測(cè)與安全系統(tǒng)[M]. 2005: 8-10.
[6] 劉勝利, 徐 楊,等. 主字母體制調(diào)制系數(shù)的選擇[J]. 飛行器測(cè)控學(xué)報(bào), 2016, 35(2): 112-116.
[7] 朱澤鋒, 張 偉. 遙測(cè)技術(shù)發(fā)展現(xiàn)狀與關(guān)鍵技術(shù)展望[J]. 自動(dòng)化技術(shù)與應(yīng)用, 2016, 35(12): 57-60.
[8] 韋惠民. 擴(kuò)頻通信技術(shù)及應(yīng)用[M].西安: 西安電子科技大學(xué)出版社,2007.
DesignofKaBandTT&CandCommunicationSystemofSpacecraft
Qiu Changquan, Yuan Yanrong, Shi Rui, Li Meng
(Science and Technology on Space Physics Laboratory, Beijing 100076, China)
Traditional S-band-based unified carrier measurement control and communication system limited by the low working frequency and narrow bandwidth can not meet the increasing requirements of modern and future spacecraft measurement control and communication system for high-speed data transmission, communication bandwidth, installation space, overcoming blackout, anti-interference, etc. This paper put forward a Ka-band direct sequence spread spectrum system spacecraft control and communication system , which has the characteristics of narrow band, good space selecting and blackout overcoming, to solve the above problems by the point frequency and channel unity of telemetry, orbit measurement system and remote control, simplifying the system structure and reducing equipment size. The system architecture and the main equipment of the system are introduced, the detailed design of the data acquisition equipment, Ka-band integrated terminal equipment and the selection of the antenna feeder equipment are described, and the ground test system is presented. The system has the characteristics of small size, wide bandwidth and good expansibility, which can meet the requirements of the design and application of future spacecraft measurement control and communication system.
Ka band; TT&C and communication; DSSS; spacecraft
2017-06-20;
2017-07-19。
邱長(zhǎng)泉(1984-),男,遼寧朝陽市人,博士,高級(jí)工程師,主要從事飛行器測(cè)控與通信、航電綜合、自動(dòng)測(cè)試系統(tǒng)等方向的研究。
1671-4598(2017)10-0271-03
10.16526/j.cnki.11-4762/tp.2017.10.069
V556
A
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00