無人船在水下地形測量中的應用與探討
2017-11-04 14:26:59付明亮
城市地理 2017年10期
付明亮


摘要:以往進行的水下地形測量使用人工操作,存在諸多困難。本文擬以無人船在水下地形測量中的應用為研究主題,基于使用GPS技術的無人船開展水下測量試驗。本文首先對當前的無人船測量系統(tǒng)進行概述,并介紹其工作原理。之后依靠試驗數(shù)據(jù),對無人船水下測量情況進行分析。從結果來看,無人船在水下測量工作中,具有著極好的前景,可以有效避免測量時的安全威脅,提升測量的效率和準確度。
關鍵詞:無人船;水下地形測量;試驗
前言:根據(jù)調查區(qū)域的類型,水下測量一般分為海洋和內陸水域兩種,就這兩種類型而言,較陸地測量,其難度都是無法比擬的。具體來說,首先水下測量的對象具有不可見性,其次是測量時,水面很難保持平穩(wěn)、船只很難保持位置固定一一易晃動移位,再者載人船有很多危險,淺灘、近岸無法到達或者不易到達。這些因素的存在,導致水下測量的誤差和困難有時候會很大。就測量方法來說,水下測量通常是讓船只停留水面,測量水下的地貌地形等情況,有時當水體不穩(wěn)定時,還需要采取涉水測量的方法,但在測量時的風險及人員配置都是較大的,對人員安全和財產安全造成了一定威脅。
基于上述考慮,無人船進行的水下測量,可以有效解決測量中的危險問題,降低人工成本。并且,無人船搭載大量的高新技術和工具,在測量準度及工作效率上都得到了很大的提升。
2無人船水下測量系統(tǒng)的構成
2.1系統(tǒng)組成及其功能
就目前所見的無人船水下測量系統(tǒng)的構成來說,其大致分為以下幾個部分:無人船平臺,自動導航裝置,聲納裝置,GPS,外圍傳感器,岸基控制中心等。其工作的主要原理是通過聲納和GPS的雙重測量,繼而以確定水下地形地貌的坐標和高度。此外,該測量系統(tǒng)還具有以下特點:
(1)獨立導航功能
在無人船中裝備有智能芯片,通過芯片工作人員可實時獲取無人船的GPS路線,并將之與預先設定的航線坐標對比,這樣可以實時地進行航線的調整。
(2)智能避障功能
無人船的船頭部分安裝有攝像機和距離傳感器,當無人船在航行中,工作人員可以實時監(jiān)控無人船的航行情況,一旦遭遇障礙物時,傳感器可做到迅速傳遞距離信息給智能芯片中,這時無人船會根據(jù)預設的安全距離數(shù)值,果斷采取避讓或停止的動作。這一過程的完成,很少有人為參與的加入,在很大程度上提升了無人船測量工作的效率和安全性。
(3)實時通訊功能
無人船系統(tǒng)還安裝有數(shù)據(jù)傳輸設備和實時地圖傳設備,依托這兩種設備無人船可進行與岸上操控中心數(shù)據(jù)的實時對接。測量數(shù)據(jù)支持的傳輸范圍在10公里內,船上的相機和數(shù)據(jù)采集設備可以實時將數(shù)據(jù)傳到工作站,同時工作站根據(jù)測量需求給無人船傳達動作指令,繼而實時調整船舶航行軌跡。
(4)具有平穩(wěn),持久的航行能力
無人測量船在硬件上也相應做出了一些改進和調整,具體來說,如將傳統(tǒng)船只單體設計變?yōu)槿w設計,做到船只重心的降低,這樣能夠顯著改善其抗風浪的能力,使船在行駛中更加順暢。此外,為了提升船的續(xù)航能力,在船上使用了高容量的鋰聚合物電池,從而大大增加了電源容量,一次出行可連續(xù)工作5小時或以上,有效地提升了工作效率。
2.2無人船系統(tǒng)的測量原理
無人船系統(tǒng)裝備有GPS、聲納這兩種主要的測量儀器。在開展水下測量時,其工作原理如下:
首先船只發(fā)出聲波,聲波從水底傳到船上時,聲納獲取水下O1點的深度h1,此時船上的GPS設備開始測量船在水面O2點的平面坐標x、Y和高程值H(這時O1、O2、O2和O4在同一豎直軸線上)。在獲得上面的數(shù)據(jù)后,水底O1點的高程數(shù)據(jù)H1可以通過式(1)計算獲得,具體詳見下圖。
式(1)中的h2和h3是已知的參數(shù)。而O1和O4的平面坐標也是相同的,分別為為x和Y,通過上述的計算,我們可以獲取水底O1點的三維坐標。
需要注意的是,船只在工作中很容易受到風浪的干擾,導致測量系統(tǒng)存在一定的誤差值,該誤差是由于船體在測量時的輕微搖動造成的。盡管測量船設備具有一定的誤差糾正功能,但是應用的范圍也僅限于較小的誤差,如果風浪較大時,測量誤差將無法避免,所以工作人員在測量前要密切關注測量水體的天氣等情況。
3水下測量試驗
3.1實驗過程
本次無人船測量試驗采用了云洲智能生產的ME70無人船,該無人船采用RF無線射頻點對點雙向通信,距離為5km,在充滿電后可以持續(xù)工作約10小時,其測深精度為2cm±0.1%h(h代表水深),定位精度(RTK)為水平±8mm+lppmRMS、垂直±15mm+1ppm RMS,試驗采樣的地點為一處3500平方米的水庫,水庫附近的地形較為開闊。在進行試驗的當天,水面較為平穩(wěn),沒有風浪,所以對測量精度的干擾可以忽略不計。
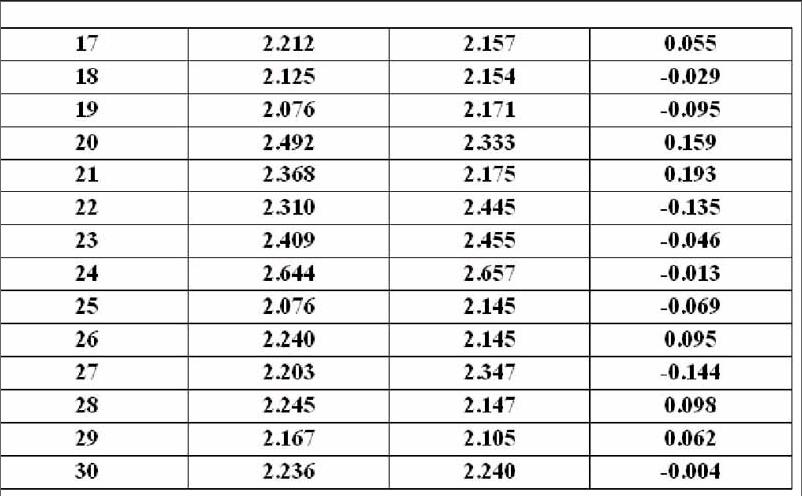
在試驗中,工作人員分別進行了手動遙控和自動航行兩種方式的測量,無人船總共的測量時間約40分鐘,總共的采集數(shù)據(jù)約1000個,我們從這些數(shù)據(jù)中隨機抽取了30個進行比對研究,之后在水庫排水后,進行了該30個數(shù)據(jù)的人工測量。具體的試驗樣本如下,其中G1為無人機測量高程,G2為人工測量高程,△G表示二者的差值:
通過比較這些數(shù)據(jù)發(fā)現(xiàn),△G數(shù)值大于零的有14個,小于零的有16個,呈現(xiàn)出正態(tài)分布的特點。而G1和G2的平均差為0.018m,這個數(shù)據(jù)是很小的,基本可以忽略不計,這說明無人船測量的數(shù)據(jù)較人工測量來說其差值符合誤差范圍,表明無人船的測量是較為可靠的。
3.2注意問題
經過本次的試驗,我們也發(fā)現(xiàn)無人船在測量中存在著一些問題:
(1)本次試驗選取的水域面積不大,導致無人船的自動巡航效果受到了減縮,我們認為,無人船自動巡航功能的能力不只如此,如果在較大的水域機械能測量時,自動巡航能力將會得到更為充分地展現(xiàn)。
(2)無人船系統(tǒng)使用的聲納穿透能力不佳,一旦聲波遇到水體中較大的懸浮物時,將會對聲波傳播造成阻礙,因此獲取的數(shù)據(jù)也難以反應水底的真實情況。結語:總之,通過上文的考察、試驗和分析,我們認為,無人船在水下地形測量工作中作用顯著突出,其依托高科技設備和手段,能夠實現(xiàn)自動化地水下地形地貌測量,且測量數(shù)據(jù)有效,工作時間短,安全穩(wěn)定、高效,給當前的水體測量提供了很大的幫助。endprint