基于RealWorks和SketchUp的建筑物點(diǎn)云數(shù)據(jù)三維建模
2017-11-06 01:59:19張德楊張真真
河南科技 2017年17期
高 俊 張德楊 張真真
基于RealWorks和SketchUp的建筑物點(diǎn)云數(shù)據(jù)三維建模
高 俊1張德楊1張真真2
(1.河南省科學(xué)技術(shù)信息研究院,河南 鄭州 450003;2.鄭州輕工業(yè)學(xué)院計(jì)算機(jī)與通信工程學(xué)院,河南 鄭州 450002)
隨著激光掃描技術(shù)的不斷提高及數(shù)據(jù)處理方法的不斷完善,地基三維激光掃描技術(shù)在建筑物三維建模方面的應(yīng)用越來越廣泛。本文基于RealWorks和SketchUp,以實(shí)例詳細(xì)介紹了地基激光掃描三維建模的技術(shù)流程,重點(diǎn)對點(diǎn)云數(shù)據(jù)的配準(zhǔn)、去噪、特征線提取、三維幾何建模和紋理貼圖等步驟進(jìn)行詳細(xì)論述,實(shí)現(xiàn)了建筑物點(diǎn)云數(shù)據(jù)三維建模。
1 研究背景
傳統(tǒng)建筑物空間信息獲取主要依賴于地面全站儀采點(diǎn)、航空攝影測量和衛(wèi)星影像等,但由于數(shù)據(jù)獲取能力的限制,難以得到真實(shí)有效的建筑物三維模型[1]。激光掃描測距技術(shù)以其高精度、高密度、高效率、實(shí)時(shí)性強(qiáng)、信息量豐富和非接觸主動測量等特點(diǎn),通過非接觸式主動測量可進(jìn)行大面積、高密度空間三維數(shù)據(jù)的采集,使測繪從傳統(tǒng)的單點(diǎn)數(shù)據(jù)采集轉(zhuǎn)變?yōu)槊芗⑦B續(xù)的自動數(shù)據(jù)獲取,增加了信息量,提高了工作效率。利用三維點(diǎn)云進(jìn)行建筑物的三維建模也得到了廣泛應(yīng)用,如化蕾[2]等利用點(diǎn)云數(shù)據(jù)建立了客家土樓的三維模型,彭文博[3]等利用點(diǎn)云數(shù)據(jù)對古建筑進(jìn)行三維建模,宮麗瑋[4]等利用Cyclone和PolyWorks分別對規(guī)則和不規(guī)則建筑物進(jìn)行三維建模。本文利用RealWorks和SketchUp以實(shí)例詳細(xì)介紹建筑物點(diǎn)云數(shù)據(jù)三維建模的技術(shù)流程和關(guān)鍵技術(shù)。
2 建筑物點(diǎn)云數(shù)據(jù)三維建模技術(shù)流程
基于點(diǎn)云數(shù)據(jù)的建筑物三維建模的流程主要包括制作掃描方案、點(diǎn)云數(shù)據(jù)采集、點(diǎn)云數(shù)據(jù)處理、特征線提取、三維模型構(gòu)建及紋理貼圖等環(huán)節(jié)。具體流程如圖1所示。
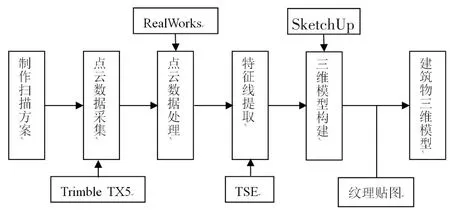
圖1 建筑物點(diǎn)云數(shù)據(jù)三維建模技術(shù)流程圖
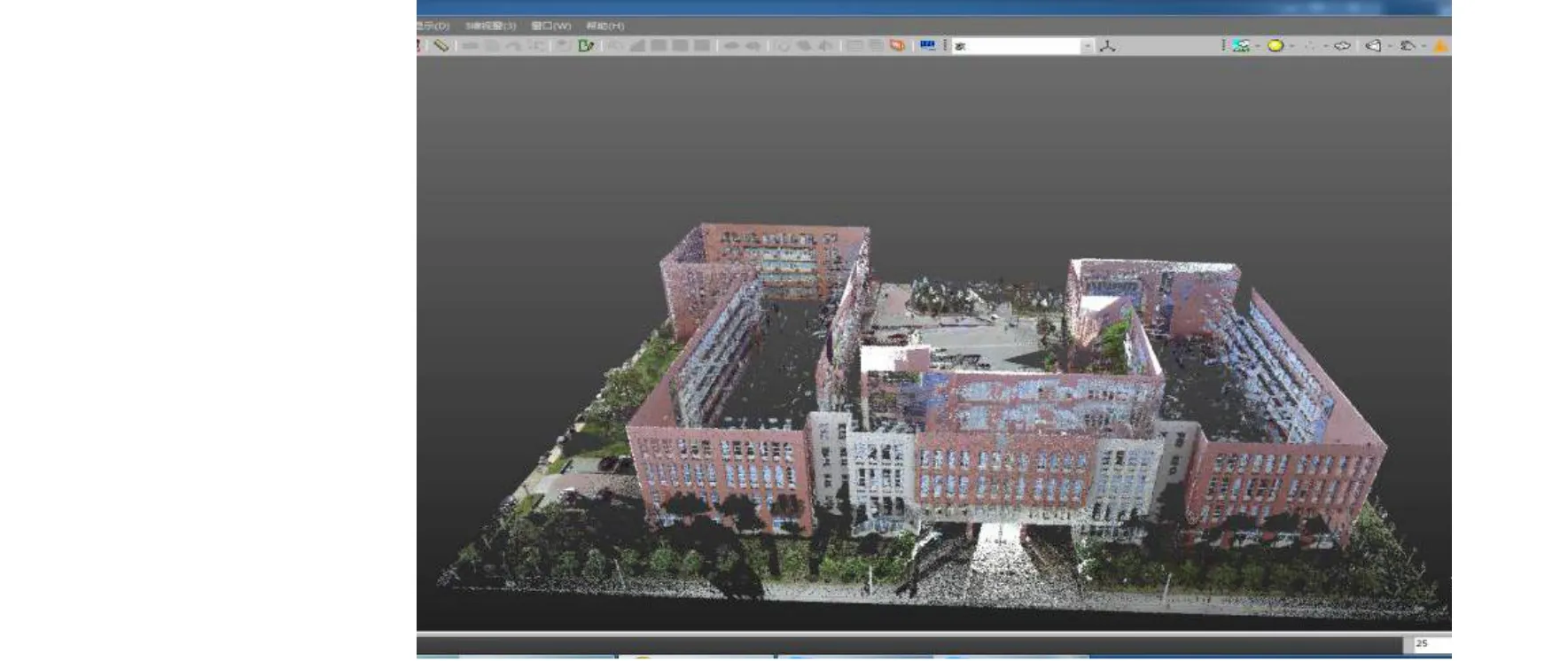
圖2 多站點(diǎn)云配準(zhǔn)結(jié)果圖
3 建筑物點(diǎn)云數(shù)據(jù)三維建模實(shí)例
3.1 點(diǎn)云數(shù)據(jù)采集
采用Trimble TX5掃描儀,其掃描距離可達(dá)120m,掃描距離精度為2mm@25m。為獲取較高精度的點(diǎn)云數(shù)據(jù),各站的平均掃描距離為16m,設(shè)定分辨率為1/2,可以獲得5mm間距的點(diǎn)云數(shù)據(jù)。由于在后續(xù)點(diǎn)云坐標(biāo)轉(zhuǎn)換和配準(zhǔn)中,需要求解7個(gè)參數(shù),因此,每2站至少需要3個(gè)公共點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,需要至少放置3個(gè)反射標(biāo)志。為了保證拼接和建模的精度,測站間設(shè)定放置5個(gè)目標(biāo)球,并保持10%以上的重疊度。在擺放目標(biāo)球時(shí),反射標(biāo)志應(yīng)避免擺放在一條直線上,同時(shí)構(gòu)成不規(guī)則的三角形(避免出現(xiàn)等腰或等邊三角形)。共架設(shè)10個(gè)測站完成鄭州輕工業(yè)學(xué)院計(jì)算機(jī)樓的點(diǎn)云數(shù)據(jù)采集。
3.2 點(diǎn)云數(shù)據(jù)處理
利用Trimble Real Works軟件對點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理,完成點(diǎn)云數(shù)據(jù)的配準(zhǔn)、消噪、沖采樣等過程。
3.2.1 點(diǎn)云數(shù)據(jù)的配準(zhǔn)。由于采用多站測量的方式,而不同掃描站獲得的點(diǎn)云分別采用其各自的局部坐標(biāo)系,需要配準(zhǔn)到統(tǒng)一坐標(biāo)系完成多站點(diǎn)云的拼接。將多站fls格式的點(diǎn)云導(dǎo)入Real Works中,選擇“有目標(biāo)配準(zhǔn)”,系統(tǒng)將根據(jù)目標(biāo)球的自動識別完成點(diǎn)云配準(zhǔn),配準(zhǔn)結(jié)果如圖2所示。由配準(zhǔn)報(bào)告可知,各個(gè)基站數(shù)據(jù)拼接后的誤差可以保持在6mm以內(nèi)。
3.2.2 點(diǎn)云消噪。激光信號在獲取目標(biāo)表面幾何和光譜信息的過程中,由于受大氣和目標(biāo)表面因素的影響及障礙物遮擋等,會不可避免地產(chǎn)生噪聲,對點(diǎn)云的分割、識別和建模都會產(chǎn)生不利影響。因此,需要在進(jìn)一步處理前先進(jìn)行點(diǎn)云濾波[4]。在RealWorks中,通過人工交互操作,轉(zhuǎn)換不同視角,對粗差、噪點(diǎn)進(jìn)行剔除。
3.2.3 點(diǎn)云數(shù)據(jù)重采樣。在點(diǎn)云數(shù)據(jù)采集的過程中,測站間保持了10%以上的重疊度,將在數(shù)據(jù)拼接的過程中造成數(shù)據(jù)冗余。此外,由于掃描儀距離目標(biāo)反射點(diǎn)之間存在距離差異,隨著掃描距離的增加,點(diǎn)云的密度將逐漸減少。因此,需要對點(diǎn)云數(shù)據(jù)設(shè)置一閾值進(jìn)行重采樣。在RealWorks中,執(zhí)行“取樣”,根據(jù)建筑物本身和點(diǎn)云數(shù)據(jù)的完整情況選取取樣模式,本文選取“空間采樣”模式,分辨率為5mm,完成點(diǎn)云數(shù)據(jù)的重采樣。
3.3 特征線提取
由于掃描的點(diǎn)云數(shù)據(jù)都是以點(diǎn)坐標(biāo)的方式保存的,文件的數(shù)據(jù)量較大,且點(diǎn)云數(shù)據(jù)無法直接用來建立模型,需要把點(diǎn)云轉(zhuǎn)變成可以持續(xù)設(shè)計(jì)的模型。利用作為SketchUp插件的Trimble Scan Explorer(TSE),可以自動提取關(guān)鍵點(diǎn)、線、面等要素信息。利用第一個(gè)Shell工具選項(xiàng)可以提取點(diǎn)云數(shù)據(jù)中所有的邊界,但這種方式對數(shù)據(jù)量較大的點(diǎn)云需要耗費(fèi)更多計(jì)算資源,可利用后兩個(gè)Shell工具選項(xiàng)從矩形或多邊形選擇窗的掃描數(shù)據(jù)中提取邊界,提取的邊界將直接傳遞到SketchUp中。
3.4 基于SketchUp的三維建模
根據(jù)已經(jīng)提取測站掃描數(shù)據(jù)中建筑物的特征線,在SketchUp中構(gòu)出三維模型的基本框架模型(白模型)(見圖3)。為得到更加真實(shí)的模型,需要在白模型的表面附上紋理貼圖,打開SketchUp的材質(zhì)工具,將紋理圖片貼到建筑物各個(gè)面上,并調(diào)整貼圖坐標(biāo),使圖片與建筑物表面吻合,貼圖效果如圖4所示。
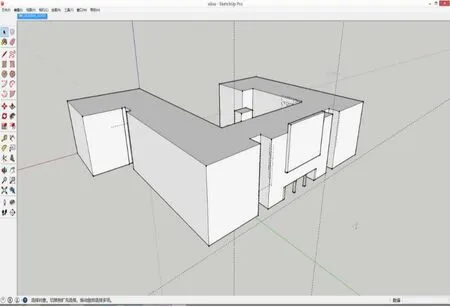
圖3 基于SketchUp的建筑物三維白模型

圖4 具有紋理貼圖的建筑物三維模型
經(jīng)貼圖和渲染后的建筑物三維模型如圖5所示,可以結(jié)合ArcScene、Skyline、Bently等平臺進(jìn)行展示。
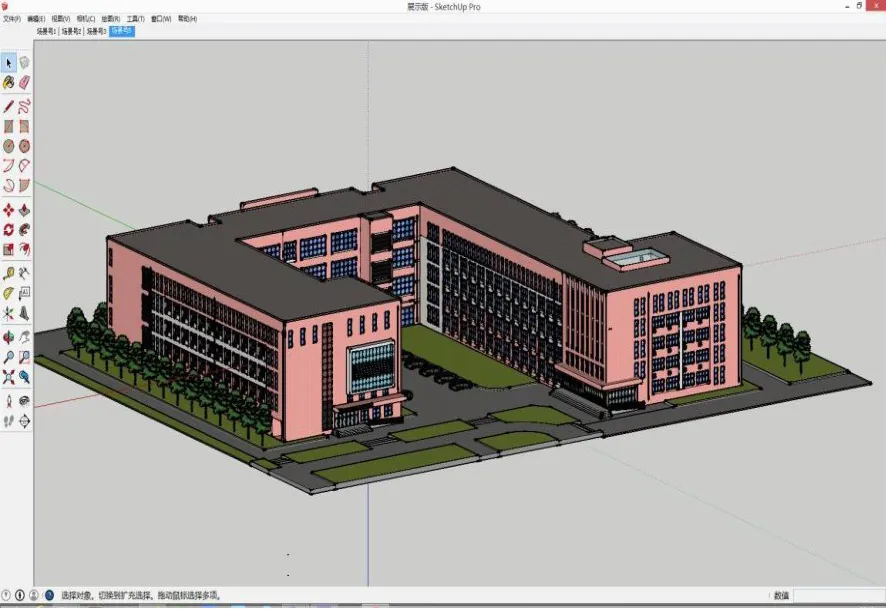
圖5 建筑物三維模型整體圖
4 結(jié)語
本文基于RealWorks和SketchUp對建筑物三維建模的方法進(jìn)行了探討,在論述外業(yè)點(diǎn)云數(shù)據(jù)采集的基礎(chǔ)上,以實(shí)例詳細(xì)介紹了地基激光掃描三維建模的技術(shù)流程,重點(diǎn)闡述了點(diǎn)云數(shù)據(jù)的配準(zhǔn)、去噪、特征線提取、三維幾何建模和紋理貼圖等方法,實(shí)現(xiàn)了基于建筑物點(diǎn)云數(shù)據(jù)的三維模型的快速生成。
[1]顏彩飛,舒莉.大型建筑物數(shù)字化及三維建模關(guān)鍵技術(shù)研究[J].甘肅科技,2014(19):92-94.
[2]化蕾,黃洪宇,陳崇成,等.基于激光點(diǎn)云數(shù)據(jù)的客家土樓三維建模[J].遙感技術(shù)與應(yīng)用,2015(1):115-120.
[3]彭文博,楊武年,王鵬.三維激光掃描技術(shù)在古建筑模型重建中的應(yīng)用[J].地理空間信息,2016(3):94-96.
[4]宮麗瑋,張毅,閆利.基于Cyclone和PolyWorks的三維建模實(shí)現(xiàn)[J].地理空間信息,2012(5):38-40.
Three Dimensional Modeling of Building Point Cloud Data Based on RealWorks and SketchUp
Gao Jun1Zhang Deyang1Zhang Zhenzhen2
(1.Henan Institute of Science and Technology,Zhengzhou Henan 450003;2.College of Computer and Communication Engineering,Zhengzhou University of Light Industry,Zhengzhou Henan450002)
With the improvement of ground-based laser scanning technology and the data processing methods,the application of 3D laser scanning technology in building 3D modeling is more widely.Based on RealWorks and Sketch-Up,this paper introduced the technical process of 3D modeling of ground-based laser scanning.The steps of point cloud registration,denoising,feature extraction,3D geometric modeling and texture mapping were discussed in detail.Using the measured data of building point cloud,the 3D modeling of building was established.
point cloud data;3D modeling;RealWorks;SketchUp
點(diǎn)云數(shù)據(jù);三維建模;RealWorks;SketchUp
P225.2;TU198
A
1003-5168(2017)09-0021-03
2017-08-01
河南省科技攻關(guān)項(xiàng)目(162102310579,162102210146)。
高俊(1980-),男,碩士,工程師,研究方向:計(jì)算機(jī)網(wǎng)絡(luò);張德楊(1979-),男,碩士,工程師,研究方向:計(jì)算機(jī)網(wǎng)絡(luò);張真真(1994-),男,本科在讀,研究方向:激光點(diǎn)云數(shù)據(jù)處理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
