DP狀態(tài)下船舶噪聲測量方法分析
2017-11-09 12:39:12儲年生練兆華
船舶與海洋工程 2017年5期
儲年生,練兆華
(上海外高橋造船有限公司,上海 200137)
DP狀態(tài)下船舶噪聲測量方法分析
儲年生,練兆華
(上海外高橋造船有限公司,上海 200137)
根據(jù)MSC 337(91)對有動力定位系統(tǒng)(Dynamical Positioning,DP)功能的船舶規(guī)定,各推進(jìn)器應(yīng)在≥40%負(fù)荷時在船接近靜止的情況下進(jìn)行噪聲測量。結(jié)合某型具有DP功能的平臺供應(yīng)船的動力配置及布置情況,針對規(guī)范中尚未明確海試船態(tài)的問題,在試航過程中對多種船態(tài)下醫(yī)務(wù)室進(jìn)行實際噪聲測量,并對結(jié)果進(jìn)行分析,找到效果相對較好且能被接受的測試船態(tài)。對DP狀態(tài)下各推進(jìn)器的工況進(jìn)行實際記錄,排除采取DP模式進(jìn)行噪聲測量的可能性。在滿足規(guī)范要求的前提下對船廠試航方法提出相關(guān)建議,為船廠試航提供有效的指導(dǎo),同時希望相關(guān)當(dāng)局在條件成熟的情況下出臺相關(guān)導(dǎo)則性文件。
DP狀態(tài);噪聲測量;分析
0 引 言
國際海事組織(International Maritime Organization,IMO)海上安全委員會(Maritime Safety Committee,MSC)對《船上噪聲等級規(guī)則》進(jìn)行修訂的決議MSC 337(91)[1]已于2014年7月1日生效,對船舶噪聲控制及人員保護(hù)提出了更高的要求。對于帶有動力定位系統(tǒng)(Dynamical Positioning,DP)船級符號的平臺供應(yīng)船等海工船舶來說,噪聲測試方法和要求在原IMO決議A468[2]的基礎(chǔ)上作了進(jìn)一步明確。原IMO決議A468只要求在側(cè)推器等推進(jìn)器運行時對這些機(jī)械場所和相鄰的艙室、工作站進(jìn)行噪聲測量。新修訂的MSC 337(91)[1]則明確提出在DP工作狀態(tài)下,控制站、值班處所及艙室的噪聲不得超過標(biāo)準(zhǔn)最大值,要求當(dāng)局、船級社、船廠及DP設(shè)計方就各推進(jìn)器在≥40%負(fù)荷工況下模擬DP模式下船態(tài)接近靜止的方法達(dá)成一致。
在制定規(guī)則時已意識到各推進(jìn)器在≥40%負(fù)荷時并不是真正的DP模式,但在DP模式下根據(jù)海況的不同,各推進(jìn)器的實際負(fù)荷千差萬別,無法統(tǒng)一。因測速等其他試驗的要求,試航的海況總要明顯好于真正在海上作業(yè)時的海況,不能真實反映船舶正常營運的狀況;同時,DP模式下各推進(jìn)器的輸出功率和方向的瞬時變化會給噪聲帶來極大的負(fù)面影響。因此,采取的方案是規(guī)定推進(jìn)器的輸出功率,而不要求在DP模式下船態(tài)接近靜止,具體操作方法可由各參與方根據(jù)實際情況進(jìn)行協(xié)商。船旗國和船級社也沒有明確規(guī)定航速小于多少為接近靜止,給船廠、船級社、船東和DP供應(yīng)商保留了根據(jù)具體情況進(jìn)行協(xié)商的自由度及自由發(fā)揮的空間。
由于規(guī)范生效的時間較短,已有的實際試驗通常只要求推進(jìn)器的功率保持40%,并沒有對船的運動速度和方向達(dá)成共識。隨著海洋工程產(chǎn)業(yè)不斷發(fā)展[3]及海工船市場狀況日益惡劣,船東接船的意愿不強(qiáng),船東和船廠在執(zhí)行該規(guī)則時分歧不斷,總是難以達(dá)成一致。對船廠來說,在該問題上一定要有自己的判斷和主見,方法不當(dāng)會造成測試結(jié)果失真甚至是超出標(biāo)準(zhǔn)要求,給交船帶來障礙。
本文以某電力推進(jìn)的平臺供應(yīng)船的動力配置和總體布置為基礎(chǔ),對試航中DP噪聲測量的實際情況進(jìn)行分析。
1 該船動力配置
該船配備2臺全回轉(zhuǎn)電力推進(jìn)裝置,電力由4臺柴油發(fā)電機(jī)組提供。艏部布置1臺管隧式側(cè)推和1臺全回轉(zhuǎn)伸縮式推進(jìn)器(見圖1)。試驗船主要參數(shù)見表1。
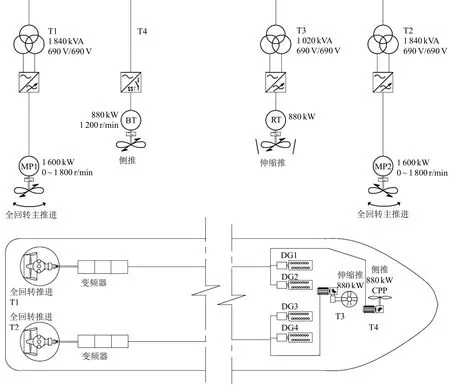
圖1 試驗船動力配置情況

表1 試驗船主要參數(shù)
2 該船總體布置
該船采用烏斯坦X-BOW設(shè)計,生活區(qū)域布置在艏部,艏部同時布置有管隧式側(cè)推和全回轉(zhuǎn)伸縮推進(jìn)器(見圖2)。在前期設(shè)計階段的噪聲預(yù)報中已充分意識到布置在主甲板上的醫(yī)務(wù)室是全船噪聲風(fēng)險最高的地方(預(yù)報醫(yī)務(wù)室噪聲為58~61dB,醫(yī)務(wù)室布置見圖3),原因在于標(biāo)準(zhǔn)值要求嚴(yán)格(為60dB);考慮到擔(dān)架進(jìn)入通道方便,將醫(yī)務(wù)室布置于主甲板上,下方就毗鄰2個推進(jìn)器,結(jié)構(gòu)傳播極為不利[4]。該區(qū)域被定為采取減振降噪措施的重點區(qū)域,盡管采取多層浮動地板減噪、改變壁板的連接形式及風(fēng)機(jī)變頻控制等多種改善措施,但試航過程中實測結(jié)果表明該區(qū)域依然是最敏感的測量區(qū)域。本文的數(shù)據(jù)分析就以醫(yī)務(wù)室的記錄為參考依據(jù)。
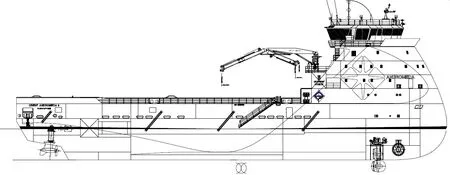
圖2 試驗船總布置
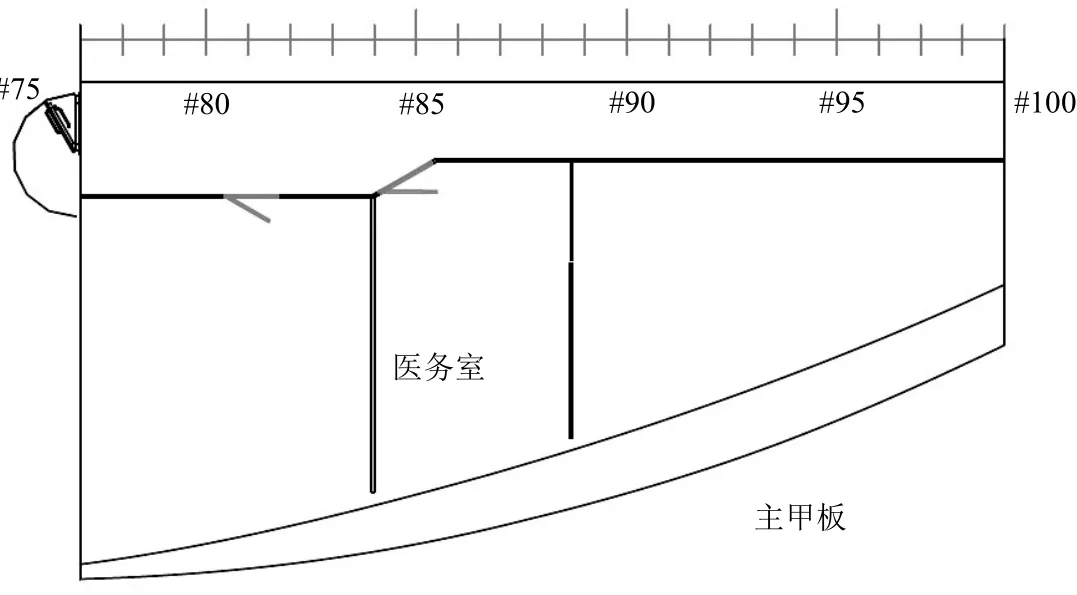
圖3 試驗船醫(yī)務(wù)室布置
3 DP噪聲測量中各推進(jìn)器的運行方向
該船艏部管隧式側(cè)推只有向左和向右2個方向,其余3個推進(jìn)器都是360°全回轉(zhuǎn)。從噪聲源上看,當(dāng)推進(jìn)器的輸出功率一定時,其本身的噪聲在不同的推進(jìn)方向上幾乎沒有變化。雖然對不同方向和頻率振動耦合之后產(chǎn)生的噪聲影響未做深入研究,但從實際經(jīng)驗上看影響并不明顯。然而,各推進(jìn)器在不同方向上運行,隨著船態(tài)的變化,在海流的作用下,水擊噪聲及作用到船體上的振動對測量結(jié)果的影響確實非常明顯,甚至?xí)?shù)據(jù)是否合格造成影響[5]。
本文分別選取推進(jìn)器的5種不同運行狀態(tài)(見圖4)進(jìn)行船態(tài)記錄及醫(yī)務(wù)室噪聲測量。結(jié)果最好的是狀態(tài)5(見圖4e)),最差的是狀態(tài)1(見圖4a)),當(dāng)艏或艉2個推進(jìn)器前進(jìn)方向相反時,由于2股水流的相對沖擊會對船舶噪聲產(chǎn)生非常不利的影響,且居住區(qū)布置于艏部,因此艏部2個推進(jìn)器相對作用時產(chǎn)生的噪聲最大。比較圖4a)和圖4b)可知,船舶順時針旋轉(zhuǎn)對左右側(cè)艙室的噪聲影響與逆時針旋轉(zhuǎn)是有區(qū)別的。由于醫(yī)務(wù)室布置在右舷,因此當(dāng)船舶順時針旋轉(zhuǎn)時噪聲會略高一些。而圖4c)狀態(tài)3,航速過高,明顯不符合規(guī)則的要求,且當(dāng)穩(wěn)定航行航速進(jìn)一步上升超過伸縮推所允許的航速時,會因安全風(fēng)險導(dǎo)致試驗終止。圖4d)與圖4e)的區(qū)別僅僅在于船舶是處于前進(jìn)還是后退工況,因前進(jìn)時艏部的阻力會小于后退時艉部的阻力,在圖4e)狀態(tài)5的情況航速會進(jìn)一步降低,也更接近規(guī)則要求的靜止?fàn)顟B(tài),具體噪聲記錄見表2。除表2記錄的數(shù)據(jù)之外,試驗過程中發(fā)現(xiàn),當(dāng)船舶旋轉(zhuǎn)時,隨著船態(tài)的改變,在海流的作用下,振動和噪聲會在某個瞬時產(chǎn)生異常,遠(yuǎn)高于正常水平,這些異常點應(yīng)予以剔除。
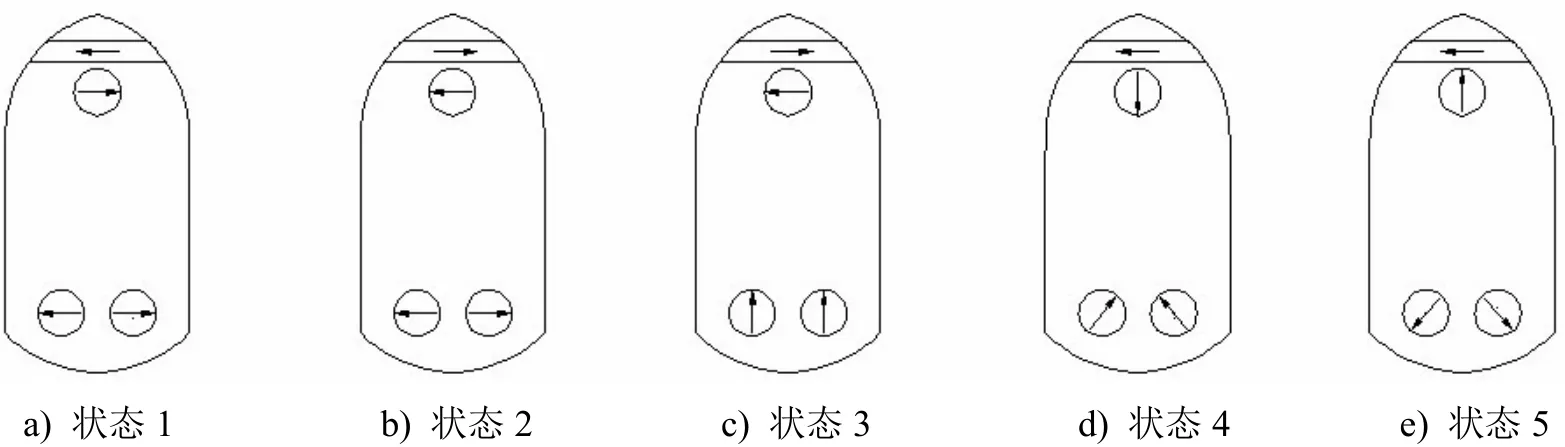
圖4 推進(jìn)器5種不同運行狀態(tài)
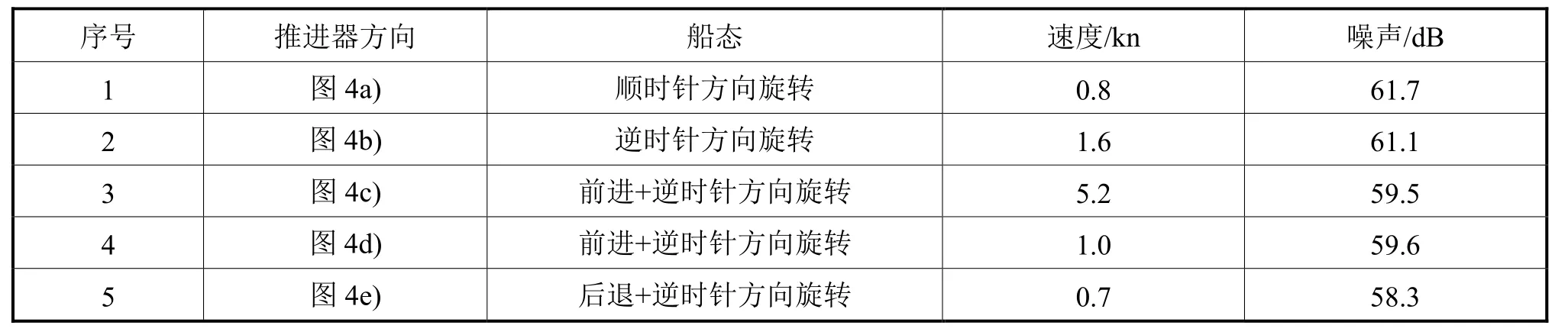
表2 船態(tài)及噪聲一覽表
4 DP模式下各推進(jìn)器運行情況
在該船海試的DP試驗中,對DP狀態(tài)下各推進(jìn)器的實際工況進(jìn)行記錄(見表3)。因試航過程中的海況可能要明顯好于實際海上作業(yè)時的海況,該記錄僅供參考。
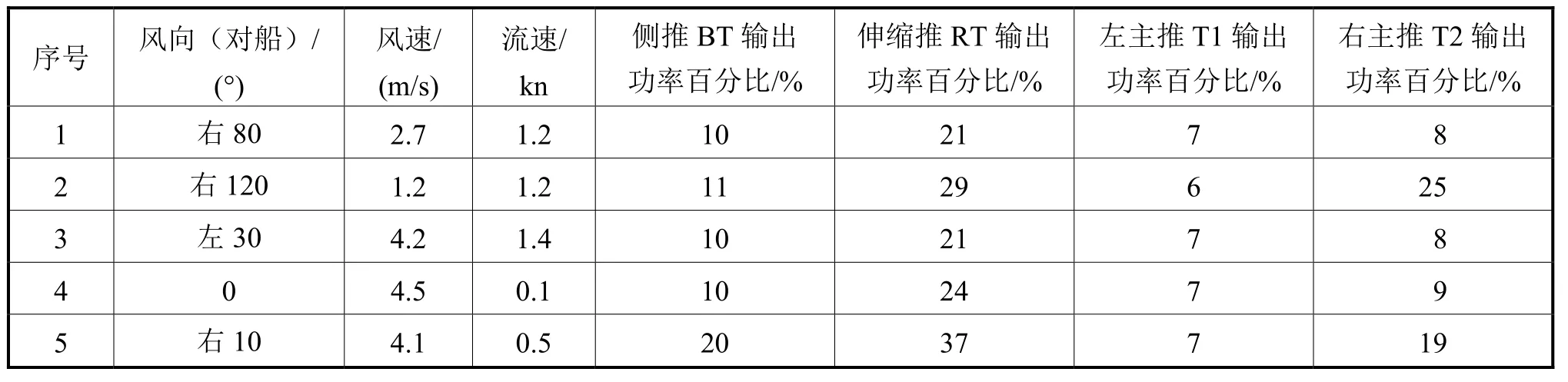
表3 DP狀態(tài)下推進(jìn)器輸出一覽表
5 試航DP噪聲測量建議
綜合以上分析,建議船廠在進(jìn)行DP振動噪聲測量時不要貿(mào)然進(jìn)行正式測量,應(yīng)按以下步驟進(jìn)行分析和簡單試驗:
1) 試驗時各推進(jìn)器輸出固定在40%,不能采用DP自動模式;
2) 根據(jù)試驗船推進(jìn)器的配置情況初步分析各推進(jìn)器的運行方向,使船舶船速盡可能小,避免使用與推進(jìn)器運行方向相反的推力抵消運行的簡單方法;
3) 根據(jù)測量點的布置情況和噪聲標(biāo)準(zhǔn)初步分析風(fēng)險最高區(qū)域或占位,并對這些區(qū)域或占位進(jìn)行初步測量,在有把握之后再進(jìn)行正式提交測量;
4) 試驗過程中注意觀察并進(jìn)行數(shù)據(jù)分析,與各方達(dá)成一致,若遇到瞬時數(shù)據(jù)異常,應(yīng)重新測量。
6 結(jié) 語
隨著《船上噪聲等級規(guī)則》的廣泛執(zhí)行和相關(guān)研究人員的不斷探索,以后會有更細(xì)致的導(dǎo)則出臺,以減少各方立場不一致造成的分歧。在當(dāng)前海工前景不明朗的大環(huán)境下,船東的要求將更為苛刻,船廠作為試驗的組織者、實施者,應(yīng)充分領(lǐng)會規(guī)則的精神,在船舶設(shè)計建造過程中,在噪聲分析預(yù)報的基礎(chǔ)上尋找減振降噪方法,嚴(yán)格執(zhí)行工藝要求,從根本上降低船舶噪聲。同時,在試航測量過程中認(rèn)真分析,采取正確的方法保證數(shù)據(jù)能真實反映船舶噪聲水平。
[1] IMO. Adoption of the code on noise levels on board ships: MSC.337 (91)[S]. 2012.
[2] IMO. Code on noise levels on board ships: A.468 (Ⅻ)[S]. 1981.
[3] 周國平. 對接國家戰(zhàn)略 推動上海海洋工程產(chǎn)業(yè)創(chuàng)新發(fā)展[J]. 船舶與海洋工程,2014 (2): 1-8.
[4] 中國船舶工業(yè)集團(tuán)公司,中國船舶重工集團(tuán)公司,中國造船工業(yè)學(xué)會.船舶設(shè)計實用手冊結(jié)構(gòu)分冊[M]. 3版. 北京:國防工業(yè)出版社,2013.
[5] 王立軍. 船舶大舵角轉(zhuǎn)向時艏搖與橫搖耦合仿真研究[J]. 船舶與海洋工程,2013 (1): 6-11.
Analysis on Ship Noise Measurement Under DP Condition
CHU Nian-sheng,LIAN Zhao-hua
(Shanghai Waigaoqiao Shipbuilding Co., Ltd., Shanghai 200137, China)
According to the regulations of MSC 337 (91) for ships with Dynamical Positioning (DP) system, the noise level of the thrusters should be measured when the thruster loading is ≥40% at the time the ship is going to stationary.As there isn’t specific rule requirement on the sea trial ship state, this study carries out noise measurements of an onboard clinic room under several ship states during sea trial based on the power configuration and general arrangement of a DP offshore support vessel. The results are analyzed to find the acceptable ship states of better effectiveness. The actual working status of each thruster under DP condition are recorded, where the possibility of noise measurement under DP mode is excluded. Meanwhile, suggestions on the sea trial are delivered to the shipyard on the premise of meeting regulatory requirements, which can provide effective guidance for the shipyard to carry out sea trials, and it is expected that relevant guidelines would be issued by the authorities..
DP condition; noise measurement; analysis
U661.44
A
2095-4069 (2017) 05-0039-04
10.14056/j.cnki.naoe.2017.05.007
2016-08-18
儲年生,男,工程師,1976年生。1994年畢業(yè)于九江船舶工業(yè)學(xué)校機(jī)械制造專業(yè),現(xiàn)主要從事船舶產(chǎn)品設(shè)計管理和技術(shù)協(xié)調(diào)工作。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21