PIXHAWK開源飛控的多旋翼無人機避障技術研究
2017-11-09 01:11:32,,
單片機與嵌入式系統應用 2017年10期
,,
(華北水利水電大學 電力學院,鄭州 450011)
PIXHAWK開源飛控的多旋翼無人機避障技術研究
王亭嶺,蘆杜洋,馬躍濤
(華北水利水電大學 電力學院,鄭州 450011)
針對當前無人機的安全問題,提出一種基于PIXHAWK開源飛控的無人避障控制方法。在PIXHAWK開源飛控中添加了超聲波傳感器、激光測距儀、電磁傳感器,并對不同傳感器的信息進行融合,依據無人機與障礙物的距離及遙控器的通道值,解算出無人機遠離障礙物的姿態信息,實現多旋翼無人機的避障飛行。實驗結果證明,該系統具有價格便宜、控制精度高、安全性能可靠的特點,在無人機安全飛行領域具有一定的應用價值。
UAV;PIXHAWK飛控;避障;多傳感器信息融合
引 言
多旋翼無人機自動避障系統[4]可以有效地減少撞機、撞人事故的發生,保護生命及財產安全,這對無人機發展產生推動作用。多旋翼無人機的自動避障,就是當無人機在飛行時,利用各種傳感器不斷檢測飛行路線上的各種障礙物,并根據傳感器傳回的數據控制無人機做出適當的飛行動作,達到躲避障礙物、安全飛行的目的。
目前,在主流的無人機避障系統中,主要實現方法分別是超聲波[5]、激光雷達、雙目視覺圖像處理[6]以及這幾種方法組成的復合方法[7]。這幾種方法分別有各自的優缺點:超聲波測距模塊價格便宜、重量輕、測距方法簡單,但是測量距離比較短;激光雷達測距具有測距準確、測量距離遠的優點,但其缺點是需要特殊的硬件,而且成本比較高;雙目視覺圖像處理需要較高的環境要求,需要額外的飛行控制器且算法復雜。本項目以PIXHAWK開源飛控為平臺,以PX4開源程序[8-9]為軟件,通過串口方式讀取無人機與障礙物的距離,同時也獲取遙控器的輸入值,再根據輸入值來判斷是否為安全操作,如果為不安全操作則在飛控程序中修改遙控器俯仰通道的值,使無人機自動朝著遠離障礙物的方向飛去,在此期間不斷檢測無人機與障礙物的距離,若為安全距離則懸停等待遙控器的輸入指令,這樣可以更加準確、穩定地控制無人機達到避障的目的。
1 系統總體方案設計
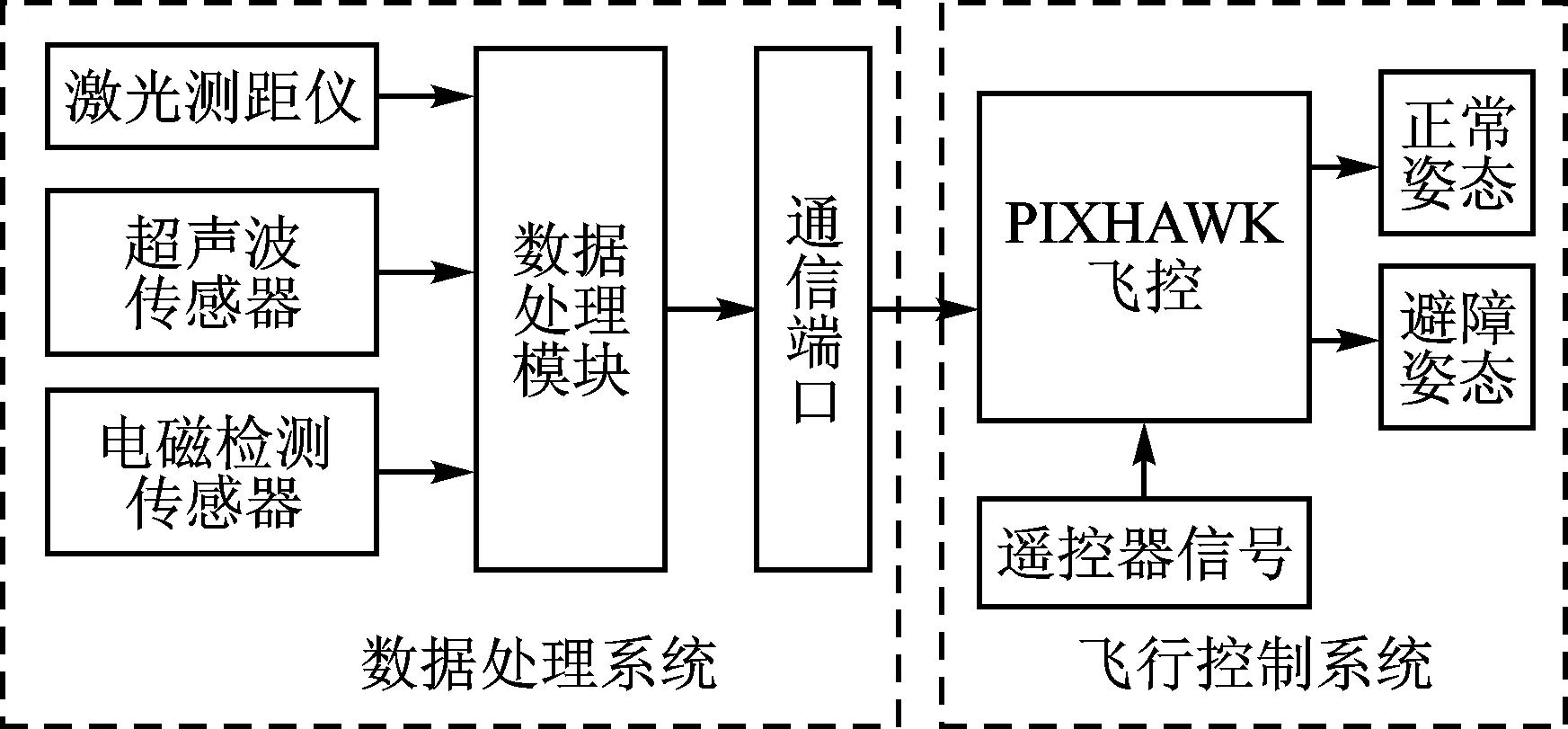
圖1 無人機避障系統整體方案
本無人機避障系統總體方案如圖1所示。本避障控制方案是在PIXHAWK開源飛控的基礎上對程序進行了改進,以實現無人機自動避障的目的。本系統具有兩大部分。第一部分為數據處理系統,主要由激光測距儀、超聲波傳感器和電磁檢測傳感器、數據處理模塊和通信端口組成。其工作原理為:利用激光測距儀、超聲波傳感器、電磁檢測傳感器測量無人機與障礙物距離,再通過數據處理模塊對這些數據進行融合處理,最后通過通信端口發送給飛控。第二部分為飛行控制系統,主要器件為PIXHAWK飛控板和遙控器,其主要功能是讀取數據處理系統發送過來的距離信息,同時也接收遙控器傳進來的控制信號,根據接收到的距離信息及遙控器信號進行邏輯判斷,并根據遙控器原始信號進行解算輸出姿態,或者執行避障姿態。
2 主要器件選型
目前,市面上所使用的無人直升機飛控種類眾多,大部分價格昂貴,且硬件封裝程序不開源,不利于學習研究及二次開發。因此本文選用了一款低成本、高性能而且完全開放的飛控系統。PIXHAWK是目前市面上一款非常流行的飛控,其硬件質量可靠、軟件開源、功能齊全,有利于我們對無人機的研究及二次開發。
PIXHAWK[10-11]主要功能如下:
① 自動穩定飛機的姿態,即自動保持偏航角、俯仰角、滾轉角于某一目標角度,傾斜角保持為零,進行直線飛行(平直飛行、爬高、下滑);
② 操控員可以通過遙控器給定任意航向或俯仰角,使飛機自動改變航向并穩定于該航向,或使飛機上仰、下俯,并保持給定的俯仰;
③ 自動保持定高飛行;
④ 飛機懸停某一固定高度定點飛行;
⑤ 多種飛行模式,且可切換飛行模式,按選定模式飛行,如自穩模式、定高模式、懸停模式和一鍵返航模式等。
無人機在飛行時,其周圍的環境復雜多變,利用單一的傳感器很難準確地檢測到各種障礙物。因此,本文采用多種傳感器信息融合技術來獲取無人機周圍環境信息。因此選擇電磁場檢測傳感器、超聲波測距傳感器、激光測距儀作為無人機的測距傳感器。本文選取型號為KS109的超聲波測距傳感器,該傳感器通過I2C接口和TTL串口實現與數據處理模塊的通信,并且可設定地址,單個I2C總線可掛載20個不同地址的設備,并有低功耗模式,在測距算法中采用此功能,能夠大大降低傳感器功耗。傳感器的測量范圍為8~1 000 cm,可以精確到1 cm。電磁傳感器主要用來測量無人機與飛行方向上的輸電線路的距離。鑒于無人機的負載能力,設計了一款電磁檢測傳感器,并且滿足以下性能要求:對于不同的輸電線路,根據電壓等級的不同可以設置不同的測量范圍,如當電壓等級為110 kV時,測量距離大于8 m;當電壓等級為220 kV時,測量距離大于12 m;當電壓等級為500 kV時,測量距離大于15 m,設計的電磁檢測傳感器工作性能穩定可靠。
3 軟件設計
3.1 軟件流程
本無人機避障系統軟件流程設計如圖2所示。在飛控系統上電初始化后,循環讀取距離信息和遙控器信號,對距離信息進行判斷處理。若距離大于設定距離,則按照遙控器輸入的原始信號進行姿態解算,從而控制飛機正常飛行。若距離小于設定距離,則進入下一個判斷,按照遙控器輸入信號解算姿態判斷飛機是遠離障礙物還是靠近障礙物,若為靠近障礙物,則按照設定值進行姿態解算,從而控制無人機遠離障礙物。由于程序是不斷循環、不斷判斷的,所以當距離回到安全距離時,又可以按照遙控器的輸入信號進行姿態計算,正常飛行。
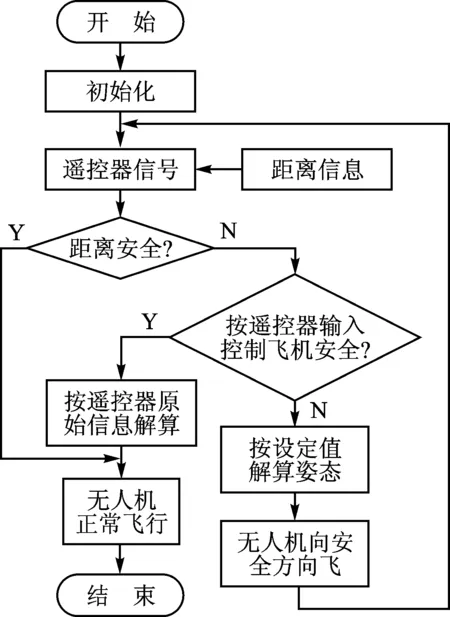
圖2 程序設計流程圖
3.2 避障算法實現
基于上述設計流程,在飛控系統中對避障算法進行了軟件實現,在飛控代碼中,無人機的前后左右運動是按照遙控器輸入的俯仰值和橫滾值[12]來控制的,可以通過修改這些值來控制無人機的運動方向,從而達到避障的目的。PIXHAWK飛控有多種飛行模式,本避障系統可以在多種模式下實現避障功能,以懸停模式及檢測前方障礙物為例介紹此功能。首先將安全距離D設置為1 600 mm,并讀取數據處理模塊發送過來的距離信息。假設飛行前方有障礙物,接下來以3種情況來進行介紹:
① 當障礙物距離大于1 600 mm時,此時無人機與障礙物保持在安全距離之外,按照接收到的遙控器俯仰值來控制無人機。
② 當障礙物距離小于1 600 mm時,無人機已經進入危險距離,應再對遙控器輸入的俯仰值進行姿態解算,若解算后無人機的飛行方向是向后飛行即遠離障礙物,則此時仍然按照遙控器的輸入值控制無人機。
③ 當障礙物距離小于1 600 mm時,無人機已經進入危險距離,應再對遙控器輸入的俯仰值進行姿態解算,若解算后無人機的飛行方向仍是向前飛行,即靠近障礙物,此時應按照避障姿態遠離障礙物。由于飛控程序是不斷循環執行的,當無人機后退至安全距離之后,會懸停等待遙控器的輸入值,并且按照遙控器輸入值進行姿態解算,控制無人機。
4 實驗結果
為驗證本避障系統的有效性、可靠性,本文以四旋翼為飛行平臺,選擇PIXHAWK飛控及PX4開源飛控系統進行無人機的避障飛行實驗。首先利用串口調試助手,將實驗結果在電腦上顯示出來,圖3為正常飛行時無人機的俯仰值及向前的加速度值,此時傳感器檢測到前方障礙物距離為2 004 mm,小于1 600 mm,所以此時為安全狀態,無人機按照飛行員輸入的俯仰值解算出向前的加速度為187 cm/s。
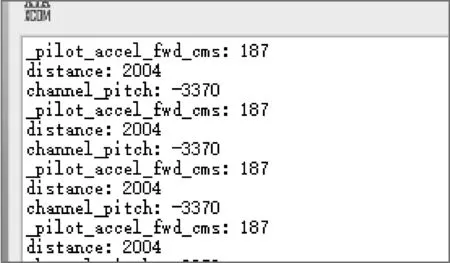
圖3 正常行駛

圖4 進入危險距離
圖4為進入危險距離后無人機的俯仰值及向前的加速度值。此時飛控接收到數據處理模塊傳回的距離信息為1 176 mm,認為此時已進入危險狀態,所以將按照100 cm/s的加速度后退,直至退到與障礙距離大于1 600 mm時,交還飛控手對無人機的控制權。
在實際飛行中,當無人機勻速接近障礙物時,會有效地執行避障動作,當無人機后退至安全距離后懸停,此時遙控器可以自由地控制各種飛行姿態,成功實現了避障目的,保護了無人機的安全。
結 語

[1] 王力群,林朝輝.基于Arduino UNO平臺的多適配性無人機避障技術[J].科技創新導報,2016(9):18-19.
[2] 徐華東.無人機電力巡線智能避障方法研究[D].南京:南京航空航天大學,2014.
[3] 周士超.無人機電力巡檢視覺避障技術研究[D].北京:北京理工大學,2016.
[4] 張西忱.無人機的避障技術及其應用[J].集成電路應用,2017(2):66-68.
[5] 沈陽陽,楊光,劉智.基于超聲波技術的四旋翼無人機定高控制系統的研究[J].電子技術與軟件工程,2017(1):80.
[6] 蘇東.基于雙目視覺的小型無人飛行器的導航與避障[D].成都:電子科技大學,2014.
[7] 任耀庭.基于超聲波測距與圖像信息相融合的旋翼無人機避障算法研究[D].成都:電子科技大學,2016.
[8] 樊超,胡小安,偉利國,等.基于PX4構建高可靠農用微小型無人機數據鏈的實現方法[J].農機化研究,2016(9):224-228.
[9] 陳子杰,劉永輝,趙厚寶,等.基于PX4構建高可靠多旋翼控制器的實現方法[J].軟件產業與工程,2014(6):38-42.
[10] 趙倫.基于Pixhawk飛控板的六旋翼飛行器自適應動態逆控制技術研究[D].北京:北方工業大學,2016.
[11] 牟濤.Pixhawk飛控技術在植保無人機上的應用與實踐[D].西安:西京學院,2017.
[12] 袁棟,陳旭芳,郁樂樂.基于PIXHAWK和IAPF法橋檢無人機避障[J].低溫建筑技術,2017(2):40-42.
[13] 蔣彪,楊光友,鄧慧軍,等.小型四旋翼飛行器位姿建模及其仿真[J].湖北工業大學學報,2016(5):18-21,35.
[14] 李浩濤.基于四旋翼無人機傳感器數據采集與處理的研究[D].天津:天津大學,2012.
[15] 彭華廈,易鑫.基于AVR通用多旋翼避障系統的設計[J].電子制作,2016(9):13-15.
王亭嶺(副教授),主要研究方向為分布式控制與優化、傳感網絡與嵌入式控制技術;蘆杜洋(碩士研究生),主要研究方向為工業控制智能檢測技術;馬躍濤(碩士研究生),主要研究方向為先進控制理論及應用。
ResearchofObstacleAvoidanceforMultipleRotorUAVBasedonPIXHAWK
WangTingling,LuDuyang,MaYuetao
(Department of Electric Power,North China Institute of Water Conservancy and Hydroelectric Power,Zhengzhou 450011,China)
Aiming at the security problem of current UAV,an unmanned obstacle avoidance control method based on PIXHAWK open-source flight control is proposed.Ultrasonic sensors,laser rangefinder,electromagnetic sensor are added in the PIXHAWK open-source flight control according to different sensor information fusion.The distance of the obstacle and the remote control channel value,attitude information of UAV are calculated from the obstacle avoidance,and the flight obstacle avoidance of multi rotor UAV is achieved..The experiment results show that the system has the characteristics of low cost,high control accuracy and reliable security performance.It has certain impetus in the field of UAV flight safety.
UAV;PIXHAWK flight control board;obstacle avoidance;multiple sensors information fusion
TP27
A
2017-06-30)
