基于動力學(xué)系統(tǒng)的最優(yōu)潮流問題可行域刻畫
2017-11-14 03:26:53江出陽江曉東
電力系統(tǒng)及其自動化學(xué)報 2017年10期
關(guān)鍵詞:系統(tǒng)
江出陽,江曉東
(1.天津大學(xué)電氣自動化與信息工程學(xué)院,天津 300072;2.美國康奈爾大學(xué)電氣與計算機工程學(xué)院,伊薩卡 14853)
基于動力學(xué)系統(tǒng)的最優(yōu)潮流問題可行域刻畫
江出陽1,江曉東2
(1.天津大學(xué)電氣自動化與信息工程學(xué)院,天津 300072;2.美國康奈爾大學(xué)電氣與計算機工程學(xué)院,伊薩卡 14853)
可行域問題是最優(yōu)潮流問題中的一個基礎(chǔ)和重要問題。由于非線性約束的存在,最優(yōu)潮流問題的可行域通常很復(fù)雜。針對如上情況,本文提出了一種非雙曲的動力學(xué)系統(tǒng),并用其穩(wěn)定平衡流形對最優(yōu)潮流問題的可行域進行了完整刻畫。同時,本文通過理論和數(shù)值分析驗證了所提方法的有效性。最后,應(yīng)用動力學(xué)系統(tǒng)的穩(wěn)定平衡流形對最優(yōu)潮流問題的可行域進行可視化,并進一步研究最優(yōu)潮流問題的可行域在不同約束參數(shù)下的變化情況。
最優(yōu)潮流;可行域;動力學(xué)系統(tǒng);穩(wěn)定平衡流形
自從1962年Carpentier[1]第1次提出電力系統(tǒng)中的網(wǎng)絡(luò)約束經(jīng)濟調(diào)度問題,最優(yōu)潮流問題就受到廣泛的關(guān)注和研究。最優(yōu)潮流問題已經(jīng)成為電力系統(tǒng)分析中的一項基本工具。而且,如何解決最優(yōu)潮流問題也是電力市場經(jīng)濟和可靠運行的核心問題。最優(yōu)潮流問題從本質(zhì)上來看是一個帶有約束的非凸非線性優(yōu)化問題。過去的幾十年來,眾多學(xué)者提出了很多確定性方法和智能啟發(fā)式算法來解決最優(yōu)潮流問題,主要包括線性規(guī)劃法、二次規(guī)劃法、非線性規(guī)劃法、牛頓法、內(nèi)點法、神經(jīng)網(wǎng)絡(luò)、遺傳算法[2]、進化算法、粒子群優(yōu)化算法和凸松弛法等[3]。但是,鮮有涉及最優(yōu)潮流問題中的一個基礎(chǔ)和重要的問題—可行域問題。最優(yōu)潮流問題的可行域定義在控制變量空間上,在該空間上,最優(yōu)潮流問題的一系列等式約束和不等式約束條件都能夠得到滿足。在最優(yōu)潮流中有線性約束(主要是框式約束)和非線性約束兩種約束條件。由于非線性約束的存在,最優(yōu)潮流的可行域一般是非凸的,而且有時是不連續(xù)的,由幾個道路連通的可行部分構(gòu)成,在每個可行部分上至少存在一個局部最優(yōu)解。文獻[4]通過數(shù)值計算驗證了最優(yōu)潮流問題的可行域確實是非凸的。文獻[5]研究了一些特定網(wǎng)絡(luò)下可行注入空間的幾何結(jié)構(gòu)。
需要特別指出的是,在電力系統(tǒng)中還有另外一個重要的“域”概念,即靜態(tài)安全域(也稱可行域)。電力系統(tǒng)的靜態(tài)安全域由Hnyilicza等[6]在1975年首次提出。安全域定義在潮流方程的功率注入空間上,在此空間上系統(tǒng)是靜態(tài)安全的。從安全域的概念提出以來,有很多文獻在研究用解析的方法近似估計靜態(tài)安全域[7]。文獻[8-11]對安全域的方法學(xué)和應(yīng)用進行了深入的研究,并取得了大量具有工程實用價值的研究成果。為了實現(xiàn)安全域概念的實用化和可視化,開發(fā)了3種實用的安全域,分別是實用動態(tài)安全域、靜態(tài)電壓穩(wěn)定的安全域和實用小擾動穩(wěn)定安全域。但是需要注意的是,電力系統(tǒng)的安全域與最優(yōu)潮流問題的可行域有很大的區(qū)別。安全域定義在功率注入空間上,而最優(yōu)潮流的可行域定義在控制變量空間上,控制變量包括PV節(jié)點的有功功率輸出和電壓幅值、平衡節(jié)點的電壓幅值等。簡單來說,可行域與最優(yōu)潮流的約束集密切相關(guān),而安全域則與功率注入空間上的安全分析密不可分。
很顯然,如果可行域是空集,那么最優(yōu)潮流問題將無解。而且如果可行域不存在,上述提到的任一方法在求解最優(yōu)潮流問題時都將發(fā)散。因此,可行域的特性對最優(yōu)潮流算法的收斂特性具有很大影響。除了2節(jié)點系統(tǒng)[12],最優(yōu)潮流問題的可行域很難解析地表達。本文利用一種非雙曲動力學(xué)系統(tǒng)的穩(wěn)定平衡流形對最優(yōu)潮流問題的可行域進行刻畫,并進一步研究等式約束和不等式約束中的參數(shù)對可行域的影響。
1 最優(yōu)潮流問題可行域定義
最優(yōu)潮流問題的約束集定義如下:

式中:NB為系統(tǒng)節(jié)點數(shù);NG為系統(tǒng)發(fā)電機臺數(shù);NL為系統(tǒng)傳輸線路數(shù);Gij和Bij分別為節(jié)點i到節(jié)點j的線路等效電導(dǎo)和等效電納;PL,i和QL,i分別為節(jié)點i的有功負(fù)荷和無功負(fù)荷;θi為節(jié)點i的電壓相角,θij=θi-θj;θref為平衡節(jié)點的電壓相角,θref設(shè)為常數(shù);Vi為節(jié)點i的電壓幅值;PG,i和QG,i分別為節(jié)點i的發(fā)電機有功功率輸出和無功功率輸出;Sf為線路l首端視在功率;St為線路l末端視在功率。
式(1)為電力系統(tǒng)分析和計算中最重要的潮流方程,式(2)為發(fā)電機有功功率和無功功率出力的物理限制,電壓幅值的工作范圍如式(3)所示,式(4)為線路潮流的熱極限。最優(yōu)潮流問題中的變量可以分為控制變量(u)和狀態(tài)變量(v)。其中控制變量包括PV節(jié)點的有功功率輸出和電壓幅值、平衡節(jié)點的電壓幅值、移相器、變壓器分接頭、并聯(lián)電容器等。如果將移相器、變壓器分接頭、并聯(lián)電容器等設(shè)備考慮進模型時,則最優(yōu)潮流問題將變?yōu)橐粋€混合整數(shù)的非線性規(guī)劃問題,這也是我們未來的研究方向之一,但是考慮到問題復(fù)雜性以及目前算法的局限性,在本文中,暫不考慮離散的控制變量,所以控制變量的個數(shù)為NG+(NG-1)=2NG-1,即所有發(fā)電機節(jié)點的電壓幅值加上PV節(jié)點有功功率輸出。所有其他的變量即為狀態(tài)變量,狀態(tài)變量可由控制變量和潮流方程(1)導(dǎo)出。至于表達式Sf和St,其可由狀態(tài)變量和控制變量共同地表達出。
為簡單起見,式(1)~式(4)可簡化為

式中:CE=(c1,…,c2NB)T;CI=(c2NB+1,…,c4NG+4NB+2NL)T。
利用變換技術(shù)可以將式(5)中的不等式轉(zhuǎn)換為等式。在這里,直接將松弛變量s加入到不等式約束中:

基于如上轉(zhuǎn)換,最優(yōu)潮流問題中的約束方程可以完整表示為

式中,H=(h1,…,hm)T:Rn→Rm,n=6NG+4NB+2NL-1,m=4NG+4NB+2NL。
定義1最優(yōu)潮流問題的可行域。
最優(yōu)潮流問題的可行域FR定義在控制變量空間上,在該空間上,最優(yōu)潮流問題的一系列等式約束和不等式約束條件都能夠得到滿足,即

由于非線性約束的存在,最優(yōu)潮流問題的可行域FR一般是非凸的,而且有時是不連續(xù)的,由幾個道路連通的可行部分構(gòu)成,即

式中:FRi為第i個道路連通的可行部分;K為可行部分的總數(shù)。
2 非線性動力學(xué)系統(tǒng)概述
一類非雙曲動力學(xué)系統(tǒng)定義為

式中,H:Rn→Rm,M:Rn→Rn×m,m≤n。
定義2穩(wěn)定平衡流形。
對于一個偽雙曲平衡流形Σ[13],如果Σ上的任意一點x∈Σ,DF(x)在正規(guī)空間Nx(Σ)上的特征向量所對應(yīng)的特征值的實部都為負(fù)值,則Σ是一個穩(wěn)定平衡流形SEM(stable equilibrium manifold);否則,Σ是一個不穩(wěn)定平衡流形UEM(unstable equilibrium manifold),特別地,如果一個偽雙曲平衡流形Σ有k個正的特征值所對應(yīng)的特征向量在正規(guī)空間Nx(Σ)上,則Σ被稱作k型不穩(wěn)定平衡流形(type-kUEM)。
3 最優(yōu)潮流問題可行域的刻畫
首先利用最優(yōu)潮流問題的等式約束與不等式約束(7),構(gòu)造一個非雙曲動力學(xué)系統(tǒng),即

式中,DH(x)為方程組H(x)的雅可比矩陣。
將系統(tǒng)(11)命名為商梯度系統(tǒng),是一個非線性、非雙曲的動力學(xué)系統(tǒng)。
文獻[13]中已經(jīng)證明,約束集(7)的可行域與系統(tǒng)(11)的穩(wěn)定平衡流形之間存在著密切的關(guān)系,如以下兩個定理所示。
定理1可行域與穩(wěn)定平衡流形。
假定約束集(7)的可行域由一些不連通的可行部分構(gòu)成。那么FRi,即約束集(7)的一個可行部分,是商梯度系統(tǒng)(11)的一個穩(wěn)定平衡流形,記作關(guān)系式為

因此,最優(yōu)潮流問題的可行域可以利用系統(tǒng)(11)的穩(wěn)定平衡流形進行完整刻畫。然而,系統(tǒng)(11)的穩(wěn)定平衡流形中可能包含如下所定義的退化穩(wěn)定平衡流形。
定義3退化穩(wěn)定平衡流形。
對于商梯度系統(tǒng)(11)的一個穩(wěn)定平衡流形Σs,如果 H(Σs)≠0 且 DH(Σs)TH(Σs)=0 ,那么Σs被稱作退化穩(wěn)定平衡流形。
顯然,當(dāng)Σs是退化穩(wěn)定平衡流形時,rank(DH(Σs))<m。相反,非退化(或常規(guī))穩(wěn)定平衡流形滿足H(Σs)=0。
定理2可行域的刻畫。
約束集(7)的可行部分與商梯度系統(tǒng)(11)的常規(guī)穩(wěn)定平衡流形一一對映,即

接下來,利用一個2節(jié)點系統(tǒng)[14]來數(shù)值驗證定理2。2節(jié)點系統(tǒng)的可行域及其所對應(yīng)的商梯度系統(tǒng)的穩(wěn)定平衡流形的數(shù)值計算結(jié)果及對比情況如圖1所示。
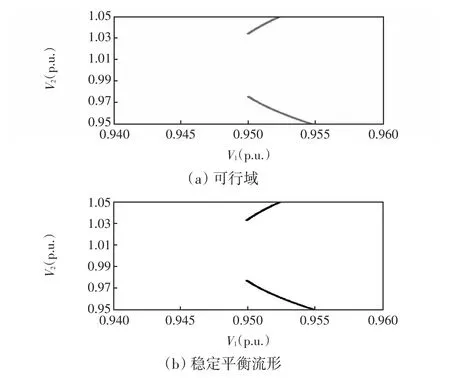
圖1 2節(jié)點系統(tǒng)可行域與穩(wěn)定平衡流形的關(guān)系Fig.1 Relationship between the feasible region and stable equilibrium manifolds of a 2-bus system
圖1(a)中的可行域是將目標(biāo)函數(shù)設(shè)定為常數(shù)后通過內(nèi)點法計算得出的,圖1(b)中穩(wěn)定平衡流形的獲得方法詳見文獻[13]。在此算例中,可行域和穩(wěn)定平衡流形是等價的。
4 算例分析
本節(jié)將通過數(shù)值計算分別求出一些測試算例的可行域和與之相對應(yīng)的商梯度系統(tǒng)的穩(wěn)定平衡流形,從而對定理1和定理2進行進一步的數(shù)值驗證。然后,將應(yīng)用穩(wěn)定平衡流形研究在如下條件下最優(yōu)潮流問題的可行域的變化情況:①不同的電壓約束;②不同的線路潮流約束;③不同的負(fù)荷情況。
4.1 可行域與穩(wěn)定平衡流形關(guān)系
根據(jù)定理1和定理2,最優(yōu)潮流問題的可行域可以由商梯度系統(tǒng)的穩(wěn)定平衡流形完全刻畫。但是為了對可行域進行可視化,仍然需要對初始點進行采樣以獲得穩(wěn)定平衡流形。為了以直接的方式計算可行域和穩(wěn)定平衡流形,首先利用拉丁超立方采樣技術(shù)均勻地采樣大量點,例如,在以下測試系統(tǒng)中的變量上下限區(qū)間內(nèi)采樣了10 000個點。然后,以這些點為初始點,通過對系統(tǒng)(11)進行積分,最終獲得大量穩(wěn)定平衡流形上的點。拉丁超立方技術(shù)能夠?qū)λ阉骺臻g進行均勻的采樣,因此,雖然無法證明,但對于小系統(tǒng),只要采樣數(shù)足夠大,所有的穩(wěn)定平衡流形都能夠被搜尋到。
在這里,對文獻[14]中的9節(jié)點系統(tǒng)進行測試,該算例由3臺發(fā)電機和9條線路構(gòu)成。由于在最優(yōu)潮流問題中,最受關(guān)注的控制變量即為發(fā)電機的有功輸出,因此對于該9節(jié)點系統(tǒng),將在PG投影平面上展示其可行部分和穩(wěn)定平衡流形。圖2中的數(shù)值結(jié)果表明,該9節(jié)點系統(tǒng)具有3個不連通的可行部分,這3個可行部分包含了4個最優(yōu)潮流解。其中,局部最優(yōu)解和全局最優(yōu)解分別用標(biāo)記‘×’和‘○’表示。針對圖2,通過觀察得到如下結(jié)論:①每個可行部分對應(yīng)一個穩(wěn)定平衡流形;②圖2(b)中存在一個退化穩(wěn)定平衡流形(孤立點),該點不是一個可行點。
上述數(shù)值研究與定理1和定理2的闡述一致,證實了動力學(xué)系統(tǒng)(11)的(非退化)穩(wěn)定平衡流形能夠完整刻畫最優(yōu)潮流問題的可行域。

圖2 9節(jié)點系統(tǒng)的可行域與穩(wěn)定平衡流形的關(guān)系Fig.2 Relationship between the feasible region and stable equilibrium manifolds of a 9-bus system
4.2 不等式約束中參數(shù)對可行域的影響
最優(yōu)潮流問題中通常有兩類不等式約束:框式約束和非線性約束(線路潮流約束)。所以在本節(jié)中,將對這兩類約束進行分別討論。在不失一般性的情況下,對于框式約束,在本節(jié)中僅考慮電壓約束。
4.2.1 電壓約束
在這里將對第3節(jié)提到的2節(jié)點系統(tǒng)進行測試,在2節(jié)點系統(tǒng)中,電壓邊界默認(rèn)為0.95 p.u.~1.05 p.u.。在以下測試中,邊界將逐漸收緊,以觀察可行域會發(fā)生什么變化。
從圖3可以看出,當(dāng)電壓邊界收緊時,常規(guī)穩(wěn)定平衡流形將沿電壓軸方向被切割。同時,當(dāng)常規(guī)穩(wěn)定平衡流形消失時,退化穩(wěn)定平衡流形(圖3(c)和圖3(d)中的孤立點)將出現(xiàn)并取代原來的位置。

圖3 2節(jié)點系統(tǒng)在不同電壓約束下穩(wěn)定平衡流形的變化情況Fig.3 Variation of stable equilibrium manifolds of a 2-bus system under different voltage constraints
4.2.2 線路潮流約束
對于第3節(jié)提到的9節(jié)點系統(tǒng),在本節(jié)中,將分如下兩種情況進行討論。

式中,γ和η分別為表征所有線路和線路4-9潮流上限變化的參數(shù)。
在第1種情況下,所有線路潮流的上限將同時并以相同的比例收緊,而在第2種情況下,僅收緊線路4-9的潮流上限。如圖4所示,由于線路潮流約束是非線性的,它們對可行域的影響也是非線性的。

圖4 9節(jié)點系統(tǒng)在不同線路潮流約束下穩(wěn)定平衡流形的變化情況Fig.4 Variation of stable equilibrium manifolds of a 9-bus system under different branch flow limits
4.3 不同負(fù)荷條件對可行域的影響
為了研究系統(tǒng)運行在不同負(fù)荷條件下可行域?qū)⑷绾巫兓谑剑?)中加入了負(fù)荷條件參數(shù)λ,則有

在下面的2節(jié)點系統(tǒng)測試中,將研究可行域和負(fù)荷條件參數(shù)之間的關(guān)系。從圖5可以看出,當(dāng)λ從1.00變化到1.01時,兩個原不連通的穩(wěn)定平衡流形將合并成一個連通的穩(wěn)定平衡流形并且變大。這個測試結(jié)果表明,當(dāng)負(fù)荷條件變化時(如從1.01變?yōu)?.00),最優(yōu)潮流問題可能出現(xiàn)多個不連通的可行部分。然后,隨著λ繼續(xù)增加,穩(wěn)定平衡流形將平移并進一步增大。當(dāng)λ大約為1.10時,穩(wěn)定平衡流形開始變小(這解釋了為什么當(dāng)負(fù)荷很重時最優(yōu)潮流問題很難計算),當(dāng)λ大約為1.22時,只剩下退化穩(wěn)定平衡流形,這意味著此時最優(yōu)潮流問題是不可行的。

圖5 2節(jié)點系統(tǒng)在不同負(fù)荷條件參數(shù)下穩(wěn)定平衡流形的變化情況Fig.5 Variation of stable equilibrium manifolds of a 2-bus system under different loading conditions
第4.2節(jié)和第4.3節(jié)中的算例結(jié)果表明,在不同的系統(tǒng)參數(shù)下,可行域的形狀和大小會改變。可行域通常在中等負(fù)荷條件下更大,這部分解釋了為什么當(dāng)負(fù)荷非常輕或極重時最優(yōu)潮流問題難以解決。在一些極端條件下,可行域可能消失(即最優(yōu)潮流問題是不可行的)。此外,對于一些特定參數(shù),原不連通的可行部分可能會合并成一個連通的可行域,這種現(xiàn)象部分解釋了最優(yōu)潮流問題中多個可行部分和不同的局部最優(yōu)解存在的原因。
5 結(jié) 語
本文對非線性最優(yōu)潮流問題的可行域進行了完整的刻畫。這種刻畫是通過構(gòu)造與非線性最優(yōu)潮流問題的等式約束以及不等式約束相關(guān)的非雙曲動力學(xué)系統(tǒng)—商梯度系統(tǒng)來完成的。接下來,利用穩(wěn)定平衡流形對可行域進行了可視化,并且數(shù)值驗證了文中的定理。此外,本文將穩(wěn)定平衡流形進一步應(yīng)用于研究在特定條件下可行域?qū)⑷绾伟l(fā)生變化。在第4.2節(jié)和第4.3節(jié)中,對所有類型的約束,包括線性框式約束、非線性線路潮流約束和含有負(fù)荷條件參數(shù)的等式約束都進行了數(shù)值測試。結(jié)果表明,在不同的系統(tǒng)參數(shù)下,可行域的形狀和大小會逐漸變化,在某些極端條件下,可行域可能會消失,而且對于某些特定的參數(shù),原來不連通的可行部分可能會合并成一個連通的區(qū)域。
[1]Carpentier J.Contribution to the economic dispatch problem[J].Bull Sac France Elect,1962,3(4):836-845.
[2]張德舉,郭力,王成山(Zhang Deju,Guo Li,Wang Chengshan).高風(fēng)電滲透率下的獨立型微網(wǎng)優(yōu)化調(diào)度方法(Optimal dispatching method of isolated microgrids with high wind power penetration rate)[J].電力系統(tǒng)及其自動化學(xué)報(Proceedings of the CSU-EPSA),2016,28(9):1-7,13.
[3]Pandya K S,Joshi S K.A survey of optimal power flow methods[J].Journal of Applied Information Technology,2005,4(5):450-458.
[4]Schecter A,O’Neill R P.Exploration of the ACOPF feasible region for the standard IEEE test set[EB/OL].https://www.ferc.gov/industries/electric/indus-act/market-planning/opfpapers/acopf-6-test-problem-properties.pdf,2013.
[5]Zhang Baosen,Tse David.Geometry of injection regions of power networks[J].IEEE Trans on Power Systems,2013,28(2):788-797.
[6]Hnyilicza E,Lee S T Y,Schweppe F C.Steady-state security regions:Set-theoretic approach[C]//PICA Conference.New Orleans,USA,1975:347-355.
[7]Wu F F,Kumagai S.Steady-state security regions of power systems[J].IEEE Trans on Circuits and Systems,1982,29(11):703-711.
[8]余貽鑫(Yu Yixin).電力系統(tǒng)安全域方法研究述評(Review of study on methodology of security regions of power system)[J].天津大學(xué)學(xué)報(Journal of Tianjin University),2008,41(6):635-646.
[9]王成山,許曉菲,余貽鑫,等(Wang Chengshan,Xu Xiaofei,Yu Yixin,et al).電力系統(tǒng)電壓穩(wěn)定域的局部可視化描述及其應(yīng)用(Visualization of part of the static voltage stability region in power systems and its application)[J].中國電機工程學(xué)報(Proceedings of the CSEE),2004,24(3):1-5.
[10]曾沅,余貽鑫(Zeng Yuan,Yu Yixin).電力系統(tǒng)動態(tài)安全域的實用解法(A practical direct method for determining dynamic security regions of electrical power systems)[J].中國電機工程學(xué)報(Proceedings of the CSEE),2003,23(5):24-28.
[11]曾沅,樊紀(jì)超,余貽鑫,等(Zeng Yuan,F(xiàn)an Jichao,Yu Yixin,et al).電力大系統(tǒng)實用動態(tài)安全域(Practical dynamic security regions of bulk power systems)[J].電力系統(tǒng)自動化(Automation of Electric Power Systems),2001,25(16):6-10.
[12]Alves D A,de Costa G R M.An analytical solution to the optimal power flow[J].IEEE Power Engineering Review,2002,22(3):49-51.
[13]Chiang H D,Jiang C Y.Feasible region of optimal power flow:Characterization and applications[J].IEEE Trans on Power Systems,DOI:10.1109/TPWRS.2017.2692268.
[14]Bukhsh W A,Grothey A,Mckinnon K I M,et al.Local solutions of the optimal power flow problem[J].IEEE Trans on Power Systems,2013,28(4):4780-4788.
Characterization of Feasible Region for Optimal Power Flow Problem Based on Dynamical System
JIANG Chuyang1,CHIANG Hsiao-Dong2
(1.School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China;2.School of Electrical and Computer Engineering,Cornell University,Ithaca 14853,USA)
Feasible region is fundamental and important for the optimal power flow(OPF)problem.Because of the existence of nonlinear constraints,the feasible region of OPF problem is usually complex.In this paper,a non-hyperbolic dynamical system is proposed and its stable equilibrium manifolds will be used to completely characterize the feasible region of OPF problem.Meanwhile,the validity of the proposed method is verified by theoretical and numerical analysis.In the end,the stable equilibrium manifolds of the dynamical system are applied to visualize the feasible region of the OPF problem,and further analyze the variations of feasible region with different constraint parameters.
optimal power flow(OPF);feasible region;dynamical system;stable equilibrium manifold
TM711
A
1003-8930(2017)10-0012-06
10.3969/j.issn.1003-8930.2017.10.003
2017-05-23;
2017-07-19
國家自然科學(xué)基金重點資助項目(51337007)
江出陽(1987—),男,博士研究生,研究方向為優(yōu)化方法、動力學(xué)系統(tǒng)及其在電力系統(tǒng)中的應(yīng)用。Email:justpayne@tju.edu.cn
江曉東(1956—),男,博士,教授,博士生導(dǎo)師,研究方向為電力系統(tǒng)穩(wěn)定和控制、非線性系統(tǒng)理論及其應(yīng)用、全局優(yōu)化技術(shù)和應(yīng)用。Email:chiang@ece.cornell.edu
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32