空間操作中的靈巧飛行控制方法
2017-11-15 01:42:42董云峰李洪玨王赟
航天器工程 2017年5期
董云峰 李洪玨 王赟
(北京航空航天大學,北京 100191)
空間操作中的靈巧飛行控制方法
董云峰 李洪玨 王赟
(北京航空航天大學,北京 100191)
空間操作中的靈巧飛行控制是指通過模仿生物的決策與運動方式,采用多種執行機構相互配合協調控制完成空間操作任務,在任務過程中能夠進行實時決策且各項性能指標均能達到最優。文章引入靈巧控制的思想,提出了一種靈巧飛行控制方法。按照生物運動協調的方式,采用冗余執行機構各取所長協同配合,利用計算智能結合人類智慧完成對失效衛星的接近軌跡規劃,實現抓捕過程中可達性、精準性、敏捷性、平順性與魯棒性的全優。采用神經網絡完成對軌跡規劃結果的學習,將規劃和控制合二為一。對失效衛星的跟瞄、接近和捕獲過程仿真表明:采用傳統規劃與控制方法的服務衛星無法在失效衛星狀態突變時完成抓捕,而采用靈巧飛行控制方法的服務衛星,在失效衛星翻滾狀態發生突變時能進行快速決策,成功對失效衛星進行捕獲,且接近抓捕過程的性能指標比失效衛星翻滾狀態未突變時幾乎沒有損失,從而驗證了靈巧飛行控制方法的可行性和有效性。
空間操作;靈巧飛行控制;失效衛星在軌捕獲;計算智能;機器學習
1 引言
空間操作任務是指一個航天器為實現某種目的而針對其他一個或多個航天器進行運動控制和操作。典型的空間操作包括對空間目標的觀測和失效衛星的捕獲。有別于傳統的對地觀測,對空間目標的觀測是在2個航天器有相對視線運動情況下完成的,是在運動中快速精確穩定成像。有別于傳統的交會對接[1-2],失效衛星沒有配合服務衛星的相對運動敏感器和對接裝置[3-4],且一般繞主軸作自旋運動并伴隨有章動。為避免產生碎片危及自身和其他航天器安全,服務衛星要完成復雜的軌道、姿態、機械臂的協同控制才能無沖擊地抓住失效衛星。因此,空間操作相比傳統規劃控制,是在狀態估計測量存在嚴重不確定性的情況下,同時提高飛行的可達性、精準性、平順性等性能指標,并要具備實時快速決策能力。
傳統控制方法一般采用單一執行機構、在有限的不確定性下實施控制。當任務約束增多、不確定性增強時,航天器控制性能下降,過于復雜的任務還要依賴地面進行任務規劃后按照規劃結果實施控制,難以滿足空間操作任務的控制性能要求和實時性要求。文獻[5]中的研究表明,現有運動控制理論框架與大量觀察到的生物運動[6-9]不符,自然界生物并不是先想好如何運動再執行動作,而是在執行動作的過程中將規劃與控制合二為一,在控制過程中利用冗余帶來靈巧性,并將冗余一直留到最后用于解決運動過程中出現的不確定性。若將文獻[5]中的思想翻譯為靈巧控制,那么靈巧控制中的靈巧應包含兩方面的內涵,一是巧妙,即通過冗余自由度的協調實現多指標全優;二是靈活,即將冗余自由度一直保留到用于應對突發的不確定性。靈巧控制思想已在機電系統[10-12]和航天領域[13-14]中得到應用,但在高度不確定的復雜任務中,仍然依賴計算智能方法完成任務規劃,其計算資源消耗對只具備有限計算能力的航天器計算機而言是難以想象的。與此相反,生物是通過長期大量的學習后實現一體化的實時規劃控制。正如文獻[15]中指出,熟練的打鐵動作只有老資歷的鐵匠才能做到,而不是鐵匠鋪的學徒。與生物學習類似,利用機器學習方法提高機器控制決策的智能化和快速性已在其他領域得到廣泛研究[16-18]。雖然靈巧控制思想已得到廣泛應用,但在空間操作任務中還沒有人對其給出明確的定義。本文建議在空間操作任務中運用上述思想進行的航天器飛行控制方法稱為靈巧飛行控制(Dexterous Flight Control),指航天器的軌道控制推力器、姿態控制飛輪等多種執行機構像人的手腳軀干一樣相互配合協調控制,使航天器在完成空間操作任務時具備運動范圍大、響應速度快、控制精度高和運動過程平順穩定的特點。
本文引入靈巧控制思想,提出執行空間操作任務的航天器靈巧飛行控制方法。結合計算智能與機器學習,探討該方法在應對各種突發不確定性時仍能實時進行決策、保證多任務指標全優的可行性。
2 靈巧飛行控制方法
靈巧控制是一個寬泛的概念,凡是采用冗余執行機構的對象都可以進行靈巧控制。將靈巧控制的概念用于軌道機動、姿態機動、對地凝視、空間操作等各類航天器控制中,即為靈巧飛行控制。
在空間操作任務中,航天器的冗余執行機構一般包括軌道控制發動機、姿態控制推力器、控制力矩陀螺、飛輪和精密輪等各種動量交換裝置和多自由度機械臂關節電機。應根據各執行機構的不同特性來設計其應用策略。推力器是能力最強的執行機構,因此用于進行大角度姿態機動以快速消除角度偏差,同時還用于消除常值干擾和對飛輪進行卸載。控制力矩陀螺具備僅次于推力器的力矩輸出能力,又具備較高的控制精度,但成組應用時存在奇異性,因此用于保證控制過程由粗到精的過渡。飛輪能夠提供小幅值但精度較高的力矩,因此用于補償控制力矩陀螺的不確定性,同時協助控制力矩陀螺逃離奇異。精密輪采用超聲電機驅動轉子,工作在步進模式,在姿態趨于穩定時能夠達到很高的控制精度,因此用于補償飛輪的不確定性,同時提高穩態控制精度。
冗余執行機構控制可以分為3個階段:①推力器大角度姿態機動;②控制力矩陀螺與飛輪的過度協調控制;③精密輪的精細控制。這3個階段并不是簡單的串聯或并聯,而是存在交叉和混合。通過采用優化算法(如粒子群優化)、選取合適的性能指標(如三軸姿態角偏差小于期望值的時刻或控制過程中的能量消耗),可以對交叉時間進行優化,得到最優的交叉混合方式。
冗余執行機構中,飛輪和精密輪需要分別具備補償控制力矩陀螺和飛輪不確定性的能力。控制力矩陀螺的不確定性,主要包括自身控制精度帶來的不確定性T1和響應頻率帶來的不確定性T2。另外,飛輪需要額外提供幫助控制力矩陀螺逃離奇異的力矩T3和補償高于控制力矩陀螺控制頻率的高頻干擾幅值A。因此,飛輪所能提供的力矩Tw應滿足
在飛輪控制過程中,同樣具備由響應頻率帶來的不確定性T4,以及自身控制精度帶來的不確定性T5,若飛輪一個控制周期內所產生的不確定性累計高于高頻干擾的幅值A,即T4+T5≤A,那么高頻干擾應由精密輪控制。
空間操作中的靈巧飛行控制通過冗余執行機構和計算智能實現多指標全優,通過機器學習提高響應快速性。在靈巧飛行控制能力的實現過程中,人一般需要進行任務工況選取、數字建模、計算智能性能指標設計、機器學習參數設計等工作,如圖1所示。
失效衛星在軌捕獲是空間操作中最具價值的任務之一。下文針對失效衛星在軌捕獲任務,討論靈巧飛行控制方法的實現。需要注意的是,失效衛星在軌捕獲任務與空間運動目標觀測等其他航天任務相比,雖然在控制對象和任務目標上有差異,但均存在不確定性大、復雜程度高、任務要求和任務評價指標眾多的特點。針對這類任務,靈巧飛行控制方法均適用。
2.1 基于計算智能的靈巧飛行控制
傳統控制方法傾向于將任務分解為多個過程,每個過程中僅考慮一個性能指標要求,并且采用一個執行機構完成該過程。空間操作中的靈巧飛行控制重點則在于冗余執行機構的協調,通過優缺點各異的多個執行機構的相互配合,實現可達性、快速性、精準性、敏捷性、穩定性、平順性和魯棒性的全部最優。多指標全優是通過人類智慧和計算智能共同保證的。結合人的智慧和計算智能,可在數字空間得到對任意工況在任意性能指標要求下的最優規劃結果,如圖2所示。圖2中,人的智慧和計算智能方法都是可擴展的,可隨著科學技術的發展吸納更加先進的人類智慧和計算智能方法。
對于圖3所示的服務衛星接近與捕獲失效衛星的任務,可采用高斯偽譜法[19]完成對失效衛星的接近軌跡規劃;然后通過數學方法進行規劃或優化求解,得到滿足各種約束且性能指標最優的解。圖3中,OoXoYoZo為失效衛星軌道坐標系,OiXiYiZi為地心慣性坐標系,OTbXTbYTbZTb為失效衛星本體坐標系,OCbXCbYCbZCb為服務衛星本體坐標系,r為兩星間相對位置矢量。
在高斯偽譜法中,首先確定規劃問題的狀態量和控制量,失效衛星接近軌跡規劃問題中的狀態量選取為服務衛星相對失效衛星的3軸相對位置r、3軸相對速度v,服務衛星3軸角速度ωC、失效衛星3軸角速度ωT,3軸相對位置和相對速度在失效衛星軌道系下的坐標為[rxryrz]和[vxvyvz],服務衛星和失效衛星的3軸角速度在慣性系下的坐標為 [ωCxωCyωCz]和 [ωTxωTyωTz],服務衛星姿態四元數qC=[qC0qC1qC2qC3],失效衛星姿態四元數qT=[qT0qT1qT2qT3],分別描述了服務衛星和失效衛星本體系相對于慣性系的姿態,共計20個狀態量[19-20]。
控制量為服務衛星的3軸控制力[FxFyFz]和3軸控制力矩[MxMyMz],即
確定接近過程的性能指標,最優控制問題的性能指標一般表示為
式中:與控制量有關的函數f(u)可表示為式(4);t0和tf為規劃問題的初始時刻和終端時刻。
式中:P0為時間指標的權重系數,取0則為燃料最優;P1~P6為燃料指標的權重系數,均取0為時間最優,均大于0為時間燃料多目標優化。
確定接近問題的約束條件,包括初始約束、終端約束、過程約束和狀態量約束。
初始約束即為服務衛星相對失效衛星的初始相對位置、相對速度,以及服務衛星和失效衛星的初始姿態角和角速度。
終端約束包括接近終端的繞飛位置約束、繞飛速度約束、繞飛姿態約束和繞飛角速度約束。
在失效衛星軌道坐標系下,繞飛位置約束為
式中:Lob為失效衛星本體坐標系到軌道坐標系的坐標轉換矩陣;[dxdydz]T為失效衛星對接點d在其本體坐標系下的坐標。
在失效衛星軌道坐標系下,繞飛速度約束為
繞飛姿態角和角速度約束為
過程約束包括動力學約束和路徑約束。動力學約束包括相對運動動力學方程(如C-W方程)、姿態動力學方程和姿態運動方程。路徑約束包括控制量約束、防撞約束和避障約束等。控制量約束一般為控制量大小不超過某個上限。防撞約束一般為服務衛星飛行過程中與失效衛星間的距離保持大于特定值。避障約束一般為服務衛星飛行過程中保持與失效衛星太陽翼等延伸機構占據的特定空間的距離大于特定值。
狀態量約束即為上文中的20個狀態量等于特定的初始值。
最終得到的期望接近軌跡是包括時刻、相對位置、相對速度、相對姿態角、相對角速度在內的一系列離散狀態量集合。
通過計算智能方法得到的接近軌跡,可能仍然不滿足接近任務的要求,需要人通過調整性能指標、改變初始約束等方法進行重新規劃,或者選取臨近的工況進行重新規劃,或者將不滿足要求的規劃結果舍棄。另外,人還要參與確定機械臂關節轉動的初始時刻和轉動規律等不依賴計算智能獲取的規劃結果。
2.2 基于機器學習的靈巧飛行控制
空間操作中的靈巧飛行控制與運動協調類似,規劃與控制是一個整體。通過對已有飛行規劃、飛行控制優化過程及優化結果的認知與學習,獲得規劃控制過程中的規律和知識,將其運用于空間操作在線實時規劃與控制,可以避免長時間的地面離線計算,同時具備應對各種來自環境、自身及目標突發不確定性情況的能力,并且在發生不確定性情況下仍然能夠保證各任務指標全部最優。實時規劃與控制能力的實現是一個過程,需要對數字仿真產生的樣本和真實衛星的運行結果進行長時間的學習訓練,其學習周期可以很長,而一旦學習完畢,其規劃控制的執行過程很快。
靈巧飛行控制實現過程中,可首先在數字空間中采用簡單理想模型進行學習訓練,然后逐步對數字空間中的各個對象進行復雜化,進一步引入工程試驗數據、測試數據乃至真實遙測數據來提高控制指標,甚至在將來還可能在真實衛星飛行過程中實時學習。隨著新的仿真工況的設計和新的真實衛星運行數據的加入,靈巧飛行過程的各個指標可以優化得越來越好,如圖4所示。與第2.1節的人類智慧和計算智能類似,圖4中的機器學習方法也都是可擴展的,可隨著科學技術的發展吸納更加先進的機器學習方法。
對于失效衛星接近與捕獲任務,通過計算智能得到的一系列規劃結果是對各種確定工況的理想接近軌跡。采用神經網絡對上述接近軌跡規劃結果進行學習。針對每條規劃的接近軌跡,以接近軌跡末端為中心,以軌跡始端到末端間的距離差為半徑R,等距離取N個特征點,與始端點和末端點一起共N+2個特征點,如圖5所示。這些個特征點對應的接近時刻、相對位置、相對速度、相對姿態角和相對角速度共同構成一組數據,作為神經網絡訓練輸出。對捕獲工況進行分析,得到每個規劃結果對應的初始狀態作為神經網絡的輸入,選取合適的網絡和網絡參數進行學習,并將學習得到的規律用于實際任務規劃中。
為了應對失效衛星發生不確定性姿態機動的情形,首先分別將每條期望接近軌跡劃分為若干段,在每段區間內再分別針對失效衛星可能不同的翻滾角速度采用高斯偽譜法重新進行規劃,直至覆蓋所有位置和所有翻滾角速度,如圖6所示。
完成規劃后,可得到一系列在不同位置對應失效衛星不同翻滾角速度的接近軌跡規劃結果。以這些結果為樣本,進行訓練,得到的神經網絡應用于實際任務中,即可使服務衛星具備應對失效衛星不確定性姿態機動的能力。
3 算例驗證
本節通過3個仿真算例論證靈巧飛行控制方法的可行性。其中:失效衛星跟瞄算例用于驗證采用冗余執行機構實現多指標全優的可行性。基于計算智能的捕獲算例和基于機器學習的捕獲算例,用于論證規劃與控制一體化快速決策的可行性。
3.1 失效衛星跟瞄
本文采用推力器、雙框架定速控制力矩陀螺(DGVSCMG)、飛輪和精密輪組成復合執行機構,分別從控制時間、跟瞄精度、穩定度和能量消耗的指標出發,比較采用復合執行機構與單獨采用DGVSCMG的跟瞄控制性能。假設在初始時刻服務衛星運行于地球靜止軌道,失效衛星與服務衛星存在較大的初始姿態偏差。DGVSCMG的控制效果如圖7所示,復合執行機構的控制效果如圖8所示,兩者的能量消耗隨時間變化情況見圖9。
將姿態精度達到0.005°、姿態穩定度達到0.005(°)/s的時刻作為服務衛星進入穩態的時刻T,則進入穩態的時刻T、指向精度α、穩定度γ和能量消耗F結果對比如表1所示。

表1 DGVSCMG與復合執行機構控制性能對比Table 1 Comparison of control performances by DGVSCMG and multi-actuators
3.2 基于計算智能的失效衛星捕獲
假設失效衛星運行于地球靜止軌道,繞其最大慣量軸以2(°)/s的角速度翻滾。采用高斯偽譜法進行服務衛星接近和圍繞失效衛星的軌跡規劃[19-20],規劃狀態量的初始取值為[-10 0 0],[0 0 0],[0 0 0],[1.155 0.000 1.633],[1 0 0 0],[1 0 0 0]。性能指標中的權重系數P0~P6取值分別為1.0,1.0,1.0,0.1,0.1,0.1,失效衛星對接點d在其本體坐標系下的坐標為[-2 0 0]m。規劃計算總耗時36 min,在失效衛星軌道坐標系下的飛行軌跡如圖10所示。采用可直接伸展捕獲的5自由度機械臂進行失效衛星的捕獲,機械臂伸展時服務衛星平臺的位置和姿態同時保持受控狀態。關節角速度和關節轉角運動遵循三角函數規則,在第37 s時機械臂完成伸展實施抓捕。服務衛星相對軌道控制偏差如圖11所示,機械臂末端捕獲沖擊載荷如圖12所示。
可以看出,采用該規劃結果時,服務衛星能夠對翻滾失效衛星進行捕獲,捕獲過程中控制偏差均保持在較低的水平,接近與捕獲間的切換平順,從而進一步證明了采用冗余執行機構協調控制能夠實現多任務指標全優。與其他方法類似,針對一個特定工況,采用計算智能的方法需要大量的地面離線規劃時間,以獲取最優任務決策。當工況發生變化時,要改變參數重新進行規劃,無法滿足空間操作的實時性要求。
3.3 基于機器學習的失效衛星捕獲
為實現特定工況下的實時規劃決策,在第3.2節的基礎上,在服務衛星初始位置附近的一小塊區域內選取10個點(如表2所示),在失效衛星不翻滾的情況下,采用高斯偽譜法分別進行接近軌跡規劃,得到10條最優的接近軌跡。設計時間、相對位置、相對速度、相對姿態角、相對角速度共計13個神經網絡,對于每條規劃得到的最優接近軌跡,除首末端點外選取8個特征點作為神經網絡期望輸出,10個規劃樣本對應的初始狀態作為神經網絡的期望輸入,對上述軌跡規劃結果進行學習訓練。以相對位置網絡為例,部分網絡訓練過程圖13所示。將訓練成型的神經網絡植入服務衛星計算機中,選取上述10個點包絡內的隨機一個點(-24.90,-0.80,1.00)m,從該點出發對失效衛星進行抓捕仿真驗證,機械臂末端捕獲沖擊載荷如圖14所示。神經網絡部署在FPGA上,計算耗時,通過軟件監測如圖15所示,FPGA晶振頻率為100 MHz。
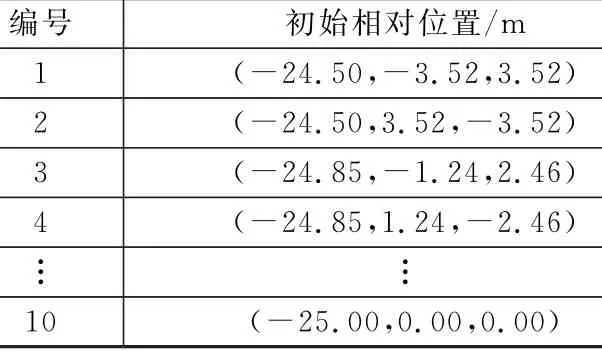
表2 樣本集Table 2 Sample set
從驗證結果可以看出:單個神經網絡規劃經歷35個振蕩周期,總耗時350 ns,所有13個神經網絡規劃總耗時在4.5 ms左右,相比高斯偽譜法的36 min而言幾乎可以忽略不計。服務衛星能夠完成對失效衛星的接近與捕獲,接近過程控制平順,捕獲后的末端沖擊載荷大小與采用傳統方法進行控制(見圖14)相比,幾乎沒有差別。
3.4 失效衛星運動狀態突變時捕獲
為進一步驗證神經網絡的適應性,在原有工況的基礎上,設計失效衛星的姿態角速度發生突變的情況。因星上資源限制,在失效衛星運動狀態發生突變時無法進行重規劃,因此無法完成對其抓捕,傳統控制方法失效。為訓練神經網絡使其能夠對狀態突變的情況做出響應,首先要對其輸入知識樣本進行進一步擴展設計。將規劃得到的每個樣本軌跡分為10段,在每段軌跡的中點處設置不同的失效衛星姿態角速度取值,形成如表3所示的增廣樣本集。繼續采用神經網絡對上述軌跡規劃結果進行學習訓練,訓練過程與圖13類似,因此不再附圖。將訓練成型的神經網絡集成到服務星星載計算機中,服務星能在失效衛星狀態發生突變時依然完成對其接近與捕獲任務,捕獲后的末端沖擊載荷如圖16所示。
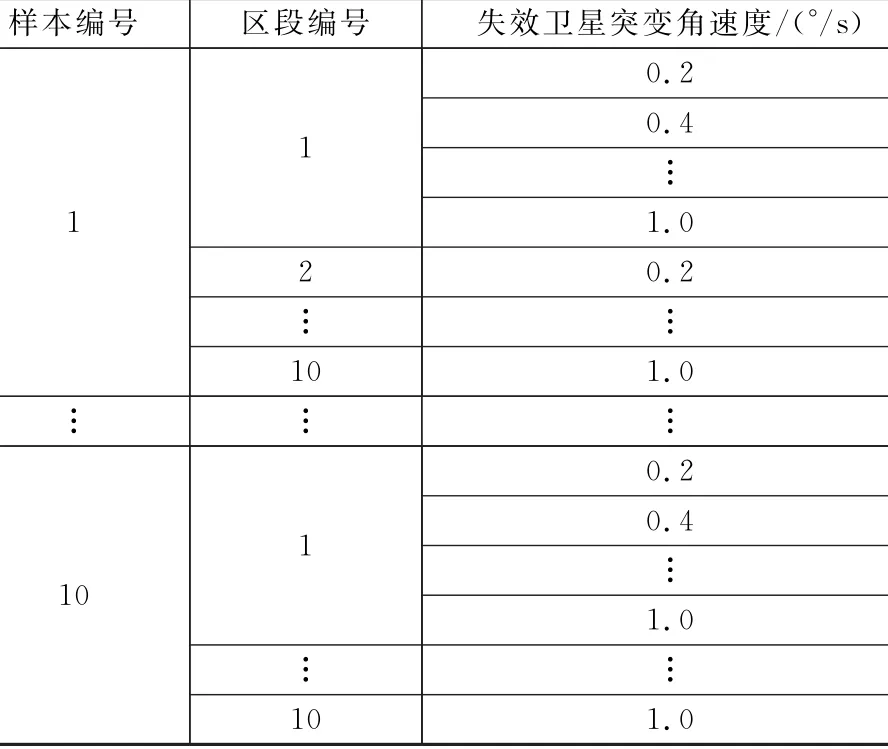
表3 增廣樣本集Table 3 Augmented sample set
4 結論
本文引入靈巧控制的思想,提出一種靈巧飛行控制方法,通過模仿生物的運動決策過程,能夠應對空間操作任務出現的突發情況,且保證任務完成時的各項性能指標最優。本文研究的主要結論如下。
(1)采取多種特性各異的冗余執行機構相互協調配合,可以使服務衛星的飛行范圍、快速性、敏捷性、平順性和魯棒性都達到最優。
(2)通過機器學習可以實現一體化的規劃與控制,能夠設計出具備快速響應能力的智能任務規劃器。
(3)通過失效衛星在軌捕獲案例的仿真驗證,證明了基于冗余執行機構協調與機器學習的靈巧飛行控制方法應用于失效衛星跟瞄和失效衛星捕獲任務的可行性,該方法還可擴展到其他航天任務中。
References)
[1]David A Whelan,Allen A Adler,Samuel B Wilson,et al.The DARPA Orbital Express Program:effecting a revolution in space-based systems[C]//Proceedings of SPIE 2000,4136.Bellingham,WA:SPIE,2000:48-56
[2]周建平.天宮一號/神舟八號交會對接任務總體評述[J].載人航天,2012,18(1):1-5 Zhou Jianping.A review of Tiangong-1/Shenzhou-8 rendezvous and docking mission[J].Manned Spaceflight,2012,18(1):1-5(in Chinese)
[3]Del Cura,Juan Manuel.ConeXpress orbital life extension vehicle(CX-OLEV)GNC[C]//Proceedings of AIAA International Astronaut Congress.Washington D.C.:AIAA,2006:4720-4733
[4]Hirzinger G,Brunner B,Landzettel K,et al.Space robotics-DLR’s telerobotic concepts,lightweight arms and articulated hands[J].Autonomous Robots,2003,14(2):127-145
[5]Emanuel Todorov,Michael I Jordan.Optimal feedback control as a theory of motor coordination[J].Nature Neuroscience,2002(5):1226-1235
[6]Cole K J,Abbs J H.Kinematic and electromyographic responses to perturbation of a rapid grasp[J].Journal of Neurophysiology,1987,57(5):1498-1510
[7]Robertson E M,Miall R C.Multi-joint limbs permit a flexible response to unpredictable events[J].Experimental Brain Research,1997,117(1):148-152
[8]Scholz J P,Schoner G,Latash M.Identifying the control structure of multi-joint coordination during pistol shooting[J].Experimental Brain Research,2000,135(3):382-404
[9]Tseng Y W,Scholz J P,Schoner G.Goal-equivalent joint coordination in pointing:affect of vision and arm dominance[J].Motor Control,2002,6(2):183-207
[10]Mohan Sankar.All-wheel drive/four-wheel drive systems and strategies[C]//Proceedings of Seoul 2000 FISITA World Automotive Congress.Seoul:FISITA World Automotive Congress,2000:1-7
[11]Shen Y H,Gao Y,Xu T.Multi-axle vehicle dynamics stability control algorithm with all independent drive wheel[J].International Journal of Automotive Technology,2016,17(5):795-805
[12]Raffaello D’Andrea.The astounding athletic power of quadcopters[EB/OL].(2013-06-01).[2016-11-11].http://www.ted.com/talks/raffaello_d_andrea_the_astounding_athletic_power_of_quadcopters
[13]葉東,孫兆偉,王健穎.敏捷衛星的聯合執行機構控制策略[J].航空學報,2012,33(6):1108-1115 Ye Dong,Sun Zhaowei,Wang Jianying.Control strategy of hybrid actuator for agile satellites[J].Acta Aeronautica et Astronautica Sinica,2012,33(6):1108-1115(in Chinese)
[14]Roithmayr C M,Karlgaar C D,Kumar R R,et al.Dynamics and control of attitude,power,and momentum for a spacecraft using flywheels and control moment gyroscopes,NASA Technical Documents TP-2003-212178[J].Washington D.C.:NASA,2003
[15]Nikolai Bernstein.The coordination and regulation of movements[M].Oxford:Pergamon Press,1967:38-42
[16]Silver D,Huang A,Maddison C J,et al.Mastering the game of go with deep neural networks and tree search[J/OL].[2017-05-23].http://ai.arizona.edu/sites/ai/files/resources/mastering_the_game_of_go_with_deep_neural_networks_and_tree_search.pdf
[17]Mihai Duguleana,Gheorghe Mogan.Neural networks based reinforcement learning for mobile robots obstacle avoidance[J].Expert Systems with Applications,2016,62:104-115
[18]Wang Hongbin,Liu Mian.Design of robotic visual servo control based on neural network and genetic algorithm[J].International Journal of Automation and Computing,2012,9(1):24-29
[19]Boyarko G,Yakimenko O,Romano M.Optimal rendezvous trajectories of a controlled spacecraft and a tumbling object[J].Journal of Guidance,Control,and Dynamics,2011,34(4):1239-1250
[20]Parv Patel,Bogdan Udrea,Michael Nayak.Optimal guidance trajectories for a Nanosat docking with a non-cooperative resident space object[C]//Proceedings of IEEE Aerospace Conference.New York:IEEE,2005:1-11
Method of Dexterous Flight Control in Space Operation
DONG Yunfeng LI Hongjue WANG Yun
(Beihang University,Beijing 100191,China)
Method of dexterous flight control is to accomplish a space operation task by imitating biological decision-making and moving method to coordinate redundant actuators together so that real-time decision can be made and all kinds of performance indices can be optimized.Taking uncontrolled tumbling satellite on-orbit service as a typical case,different actuators are coordinated together to get all their advantages,the approaching trajectories are planned by combining computational intelligence and human intelligence,thus performance indices including accessibility,accuracy,agility,smoothness and robustness are optimal.A series of artificial neural networks are used to learn from the planned trajectories in order to combine plan and control into one procedure.The dexterous flight control method is proved to be practical and effective through simulations of aiming,approaching and capturing of an uncontrolled tumbling satellite.The approaching and capture of the uncontrolled tumbling satellite can be successfully achieved even the tumbling status of the uncontrolled satellite changes,with almost no loss on approach and capture performances compared to the capture of uncontrolled satellite with unchanged tumbling status.
space operation;dexterous flight control;capture of uncontrolled satellite;computational intelligence;machine learning
V448.2
A
10.3969/j.issn.1673-8748.2017.05.002
2017-07-07;
2017-08-24
董云峰,男,博士,教授,研究方向為航天器動力學與控制。Email:sinosat@buaa.edu.com。
(編輯:夏光)
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
商周刊(2017年9期)2017-08-22 02:57:56
中國衛生(2016年2期)2016-11-12 13:22:16
