一種新型球形機器人虛擬樣機的設(shè)計及運動仿真
2017-11-16 02:04:30張云偉代進(jìn)輪
軟件 2017年10期
劉 歡,張云偉,代進(jìn)輪
(昆明理工大學(xué) 信息工程與自動化學(xué)院,云南 昆明 650500)
一種新型球形機器人虛擬樣機的設(shè)計及運動仿真
劉 歡,張云偉*,代進(jìn)輪
(昆明理工大學(xué) 信息工程與自動化學(xué)院,云南 昆明 650500)
提出了一種采用雙齒輪齒條傳動機構(gòu)的新型球形機器人設(shè)計方案,該方案在球形機器人同一直徑方向上安裝兩組齒輪齒條傳動機構(gòu)作為內(nèi)部驅(qū)動裝置,論文詳細(xì)介紹了該球形機器人的機械結(jié)構(gòu),并通過受力分析對其直線運動和轉(zhuǎn)彎運動的運動原理進(jìn)行了理論分析。聯(lián)合使用SOLIDWORKS和ADAMS,建立了球形機器人的虛擬樣機并進(jìn)行運動仿真。受力分析和運動仿真結(jié)果驗證了該球形機器人結(jié)構(gòu)的可行性,為物理樣機后期制作提供依據(jù)。
球形機器人;ADAMS;虛擬樣機;運動仿真
0 引言
球形機器人由內(nèi)部驅(qū)動裝置和球形外殼組成,運動方式是滾動。具有空間占比低、運動轉(zhuǎn)彎靈活、行駛阻力小、抗傾翻能力強的優(yōu)點,適合行駛在各種惡劣環(huán)境中,備受國內(nèi)外研究者的關(guān)注。Halme等[1]設(shè)計出來世界上第一個球形機器人,內(nèi)部驅(qū)動單元是一個驅(qū)動輪,通過驅(qū)動輪在球殼內(nèi)部的滾動改變配重中心位置來驅(qū)動球體前后運動,Bicchi等[2]人將內(nèi)部驅(qū)動裝置換成二輪小車,這兩種結(jié)構(gòu)的內(nèi)部驅(qū)動裝置與內(nèi)球面直接接觸,容易出現(xiàn)打滑的情況。Javadi等[3]人設(shè)計了一種名為“August”的球形機器人,該球形機器人的內(nèi)部驅(qū)動機構(gòu)是四根呈正面體結(jié)構(gòu)的絲狀輪輻組成,每個輪輻上裝有配重塊,通過配合改變每個輪輻上的配重位置來使系統(tǒng)運動,北京郵電大學(xué)孫漢旭等[4]研制的 BYQ3機器人通過兩個電機分別驅(qū)動兩個配重塊繞兩個互相垂直的軸轉(zhuǎn)動,產(chǎn)生機器人直線運動軸轉(zhuǎn)向運動的驅(qū)動力,這兩種球形機器人都依賴多個軸向的動力源來使機器人運動,當(dāng)控制機器人轉(zhuǎn)彎時,需要同時協(xié)調(diào)多個方向上的驅(qū)動力矩,對于內(nèi)驅(qū)動單元系統(tǒng)的協(xié)調(diào)性要求較高,控制復(fù)雜。
傳統(tǒng)產(chǎn)品設(shè)計方法是按照模型設(shè)計、樣機試制、試驗、改進(jìn)定型等步驟一步一步操作,若是在試驗之后發(fā)現(xiàn)錯誤只能重新改造物理樣機再次重新試驗,如此反復(fù),耗費大量的時間和成本[5]。而球形機器人的機械結(jié)構(gòu)一般不易多次拆分和組裝,因此若將傳統(tǒng)產(chǎn)品設(shè)計的方法運用到球形機器人設(shè)計上,顯然不現(xiàn)實。
針對上述球形機器人驅(qū)動機構(gòu)和設(shè)計方法存在的不足,設(shè)計了一種雙齒輪齒條驅(qū)動的球形機器人,具有傳動效率高不易打滑的優(yōu)點,同時采用雙齒輪齒條驅(qū)動機構(gòu),不需要協(xié)調(diào)多個方向的動力源驅(qū)使機器人轉(zhuǎn)動,使得機器人的轉(zhuǎn)向變的簡單。對球形機器人直線運動和轉(zhuǎn)彎運動進(jìn)行受力分析。利用虛擬樣機技術(shù)設(shè)計出球形機器人的數(shù)字化樣機,并且進(jìn)一步對其進(jìn)行直線和轉(zhuǎn)彎狀態(tài)的運動仿真。
1 雙齒輪齒條驅(qū)動球形機器人的機械機構(gòu)
雙齒輪齒條驅(qū)動球形機器人的機械結(jié)構(gòu)簡單對稱,內(nèi)部驅(qū)動單元采用左右對稱的齒輪齒條傳動機構(gòu),可以解決用輪子機構(gòu)驅(qū)動球形機器人時驅(qū)動輪在球形內(nèi)表面容易打滑的問題,同時由于齒輪齒條傳動的高效性,可以減小電機的驅(qū)動力矩。所設(shè)計的球形機器人的總體機構(gòu)簡圖如圖1所示。該裝置主要由外球殼 1、左齒輪齒條傳動機構(gòu) 2和右齒輪齒條傳動機構(gòu)3組成。其中左右齒輪齒條傳動機構(gòu)的齒條上分布著螺紋孔,通過配套的螺釘分別與外球殼固連。齒輪齒條傳動機構(gòu)的詳細(xì)簡圖如圖2所示,包括內(nèi)齒條1、直線齒輪2、直線齒輪約束裝置3和直流伺服電機 4組成。直線齒輪 2與內(nèi)齒條 1嚙合,直流伺服電機軸承與直線齒輪連接,直線齒輪約束裝置3分別緊貼地安裝在直線齒輪2的左右兩邊,內(nèi)齒條1的兩側(cè)延伸有兩圈圓弧軌道,直線齒輪約束裝置3的一端與圓弧軌道接觸,這樣設(shè)計的目的是避免直線齒輪2在繞著內(nèi)齒條1轉(zhuǎn)動時偏離內(nèi)齒條所在的軌道。
2 運動原理理論分析
球形機器人主要有直線運動和轉(zhuǎn)彎運動,為了便于運動原理分析,簡化球形機器人模型,做以下幾點假設(shè)。
1. 球形外殼等效為質(zhì)量為Mb半徑為R的薄壁球殼;
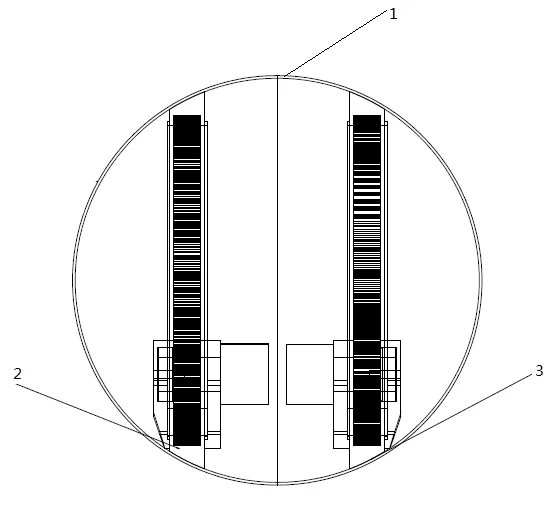
圖1 總體機構(gòu)簡圖Fig.1 General organization diagram
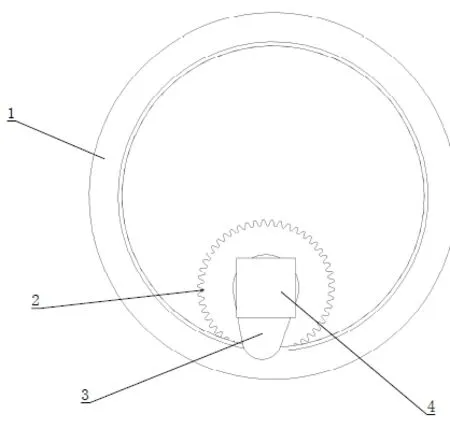
圖2 齒輪齒條傳動機構(gòu)簡圖Fig.2 Diagram of gear rack transmission mechanism
2. 當(dāng)直線運動時,球殼內(nèi)除了兩個直輪外的電機、電機輸出軸、直線齒輪約束裝置這些結(jié)構(gòu)等效為位于球心位置質(zhì)量為M的質(zhì)點,在轉(zhuǎn)彎運動時,以上機構(gòu)可以看作位于球殼直徑方向上質(zhì)量為1/2M的兩個質(zhì)點;
3. 左右直線齒輪分別等效于質(zhì)量為 ml=mr=m的質(zhì)點,與球心對稱平面的水平距離為d。
由于雙齒輪齒條驅(qū)動球形機器人左右 結(jié)構(gòu)對稱,可以將復(fù)雜的非完整系統(tǒng)轉(zhuǎn)化為完整系統(tǒng)來分析。將球形機器人在平面上的運動等效為一個圓盤在二維平面上的運動。直線運動原理分析如下:當(dāng)左右電機轉(zhuǎn)速、初相位和方向完全相同時,左右直線齒輪則可以等效為質(zhì)量為2 m的直線齒輪,直線齒輪與內(nèi)齒條嚙合傳動,齒輪位置的變化使球形機器人的質(zhì)心在水平面上的投影成周期性變化,產(chǎn)生驅(qū)動力矩,球形機器人向前滾動。在地面上建立靜坐標(biāo)系 O-XY,球形機器人初始位置在 o點,球體上的o’點與o點重合,圖3為某時刻球形機器人在直線運動時的受力分析圖。
當(dāng)左右電機的轉(zhuǎn)速相同方向相反時,帶動左右直線齒輪以相同速度反向在大齒條上齒合轉(zhuǎn)動,使左右慣性力在水平方向上的分力大小相同,方向相反。對球形機器人的垂直于水平方向的豎直中心軸產(chǎn)生旋轉(zhuǎn)力矩,使得球形機器人繞豎直中心軸轉(zhuǎn)動,實現(xiàn)轉(zhuǎn)向。圖4是球形機器人某一時刻轉(zhuǎn)向運動狀態(tài)和受力分析圖。

圖3 球形機器人直線運動受力簡圖Fig.3 Diagram of force analysis on straight motion of spherical robot
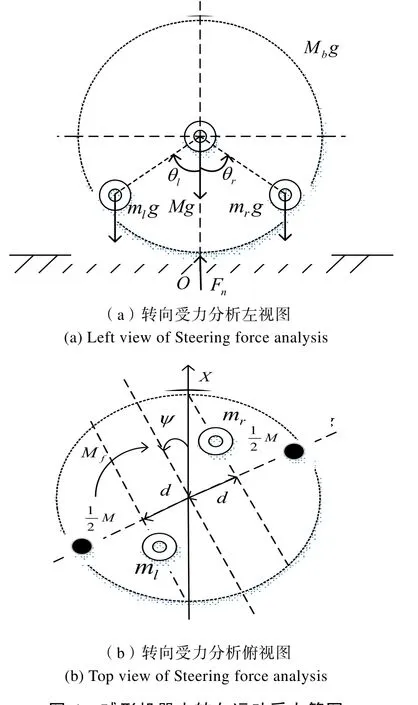
圖4 球形機器人轉(zhuǎn)向運動受力簡圖Fig.4 Diagram of stress analysis on turning motion of spherical robot
3 虛擬樣機三維實體建模
ADAMS是一種目前應(yīng)用較廣泛的虛擬樣機仿真軟件,使用ADAMS軟件可以在虛擬環(huán)境中真實地模擬系統(tǒng)的運動,并且不斷改進(jìn)設(shè)計缺陷。ADAMS/View只提供了一些簡單模型物體的創(chuàng)建,難以創(chuàng)建較復(fù)雜的物體模型,所以聯(lián)合使用 SOLIDWORKS和ADAMS建立球形機器人的虛擬樣機。圖5是建立虛擬樣機模型的流程圖。
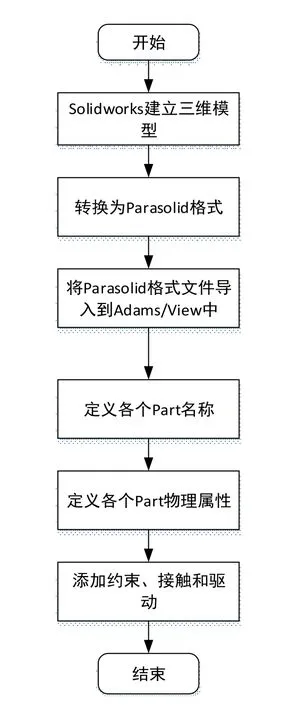
圖5 虛擬樣機模型建立流程圖Fig.5 The flow chart of virtual prototype model establishment

圖6 系統(tǒng)添加約束和驅(qū)動后的模型Fig.6 Model of system with contact and motion
由于球形機器人的運動方式特殊,在 ADAMS中不能直接添加球殼與平面的接觸力,無法直接模擬球殼在平面上滾動,為了解決這個問題,可以在ADAMS/view中添加一張具有一定厚度的矩形平板,矩形平板與大地之間添加固定副,采用在球殼和矩形平板之間添加接觸力(Contact)的方法來解決[6]。最后給左右齒輪齒條傳動機構(gòu)分別施加驅(qū)動(Motion),使模型按照設(shè)計要求進(jìn)行運動仿真,添加約束和驅(qū)動后的虛擬樣機模型見圖7。
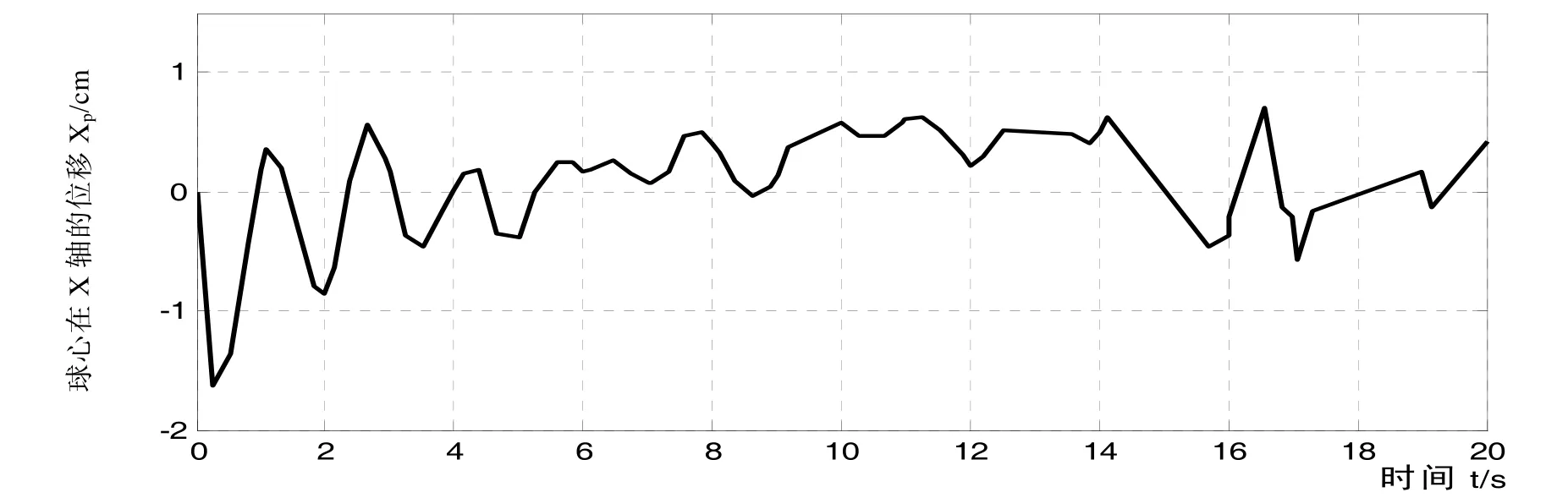
圖7 直線運動球心在X軸位移變化圖Fig.7 Diagram of ball’s displacement variation in X – axis on straight motion

圖8 直線運動球心在Z軸位移變化圖Fig.8 Diagram of ball’s displacement variation in Z – axis on straight motion
4 仿真計算及其結(jié)果
為了驗證雙齒輪齒條驅(qū)動的球形機器人在平面上是否具有直行、轉(zhuǎn)彎以及越過障礙物的能力,用ADAMS對球形機器人進(jìn)行直線運動、轉(zhuǎn)彎運動仿真。按照設(shè)計要求,選取球形機器人幾種典型的運動狀態(tài)仿真計算。在下面的敘述中,lω代表左齒輪齒條傳動機構(gòu)電機的轉(zhuǎn)速,rω代表右齒輪齒條傳動機構(gòu)電機的轉(zhuǎn)速,在ADAMS界面中,機器人球心在水平面的投影落在XOZ平面上,并且球心的初始坐標(biāo)值為(0,0,0),機器人初始正前方向為Z軸負(fù)方向,機器人左右方向分別為X軸負(fù)方向和X軸正方向。下面分別對這幾種運動狀態(tài)進(jìn)行討論和仿真。
(1)直線運動
(2)轉(zhuǎn)彎運動
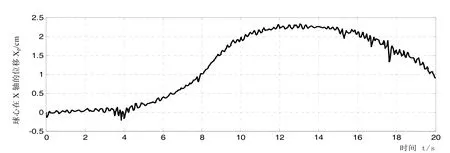
圖9 原地轉(zhuǎn)彎運動球心在X軸位移變化圖Fig.9 Diagram of ball’s displacement variation in X– axis on spot turning
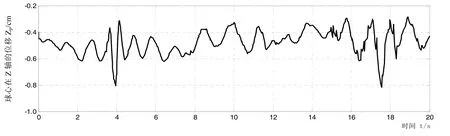
圖10 原地轉(zhuǎn)彎運動球心在X軸位移變化圖Fig.10 Diagram of ball’s displacement variation in Z– axis on spot turning
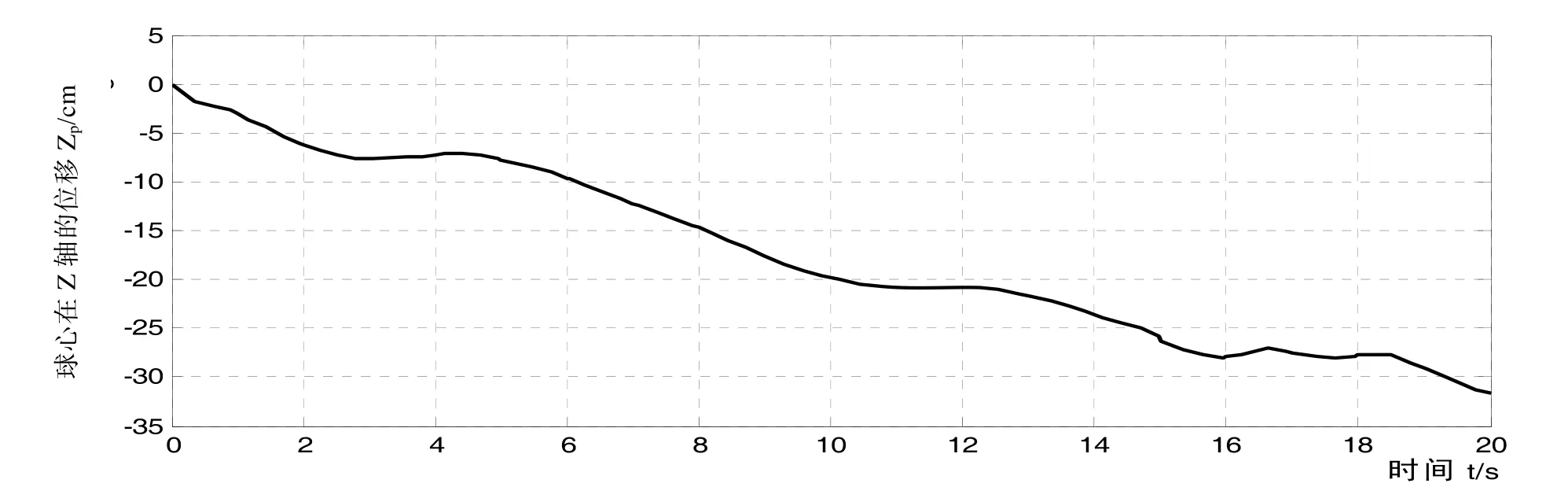
圖11 弧線轉(zhuǎn)彎運動球心在Z軸位移變化圖Fig.11 Diagram of ball’s displacement variation in Z– axis on Arc turning
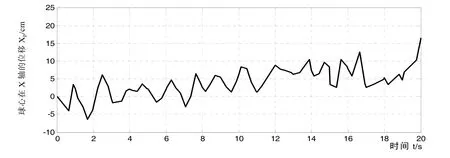
圖12 弧線轉(zhuǎn)彎運動球心在X軸位移變化圖Fig.12 Diagram of ball’s displacement variation in X– axis on Arc turning
5 總結(jié)
本文設(shè)計了一種雙齒輪齒條驅(qū)動的新型驅(qū)動結(jié)構(gòu)的機器人,對其進(jìn)行了直線運動和轉(zhuǎn)彎運動的受力分析,把非完整系統(tǒng)轉(zhuǎn)化為在二維平面上的完整系統(tǒng),從理論上分析了所設(shè)計的球形機器人具有直線運動和轉(zhuǎn)向運動的能力。利用SOLIDWORKS創(chuàng)建了球形機器人的三維實體模型,利用ADAMS建立虛擬樣機模型,并且對其分別進(jìn)行直線和轉(zhuǎn)向的運動仿真,進(jìn)一步驗證了所設(shè)計的球形滿足直線行走和轉(zhuǎn)向運動的要求,為物理樣機的制作奠定了基礎(chǔ)。
[1] Halme A, Schonberg T, Wang Y. Motion Control of a Spherical Mobile Robot[C]//In 4th International Workshop on Advanced Motion Control (AMC’96). Japan: Mie University,1996, 259-264.
[2] Bicchi A, Balluchi A, Prattichizzo D, Gorelli A. Introducing the Sphericle: an Experimental Testbed for Research and Teaching in Nonholonomy [C]//In Proc. IEEE Int. Conf. on Robotics and Automation. 1997, 2620-2625.
[3] Javadi A, Mojabi P. Introducing August: a Novel Strategy for an Omnidirectional Spherical Rolling Robot[C]//In Proc.IEEE Int.Conf. on Robotics and Automation. Washington:San D C, 2002, 3527-3533.
[4] 肖愛平, 孫漢旭, 譚月勝, 等.一種球形機器人運動軌跡規(guī)劃與控制[J]. 機器人, 2004, 26(5): 444-447.Xiao Aiping, Sun Hanxu, Tan Yuesheng, et al. Movement trajectory planning and control for a spherical robot [J].Robot, 2004, 26(5): 444-447.
[5] 鄭建榮. ADAMS—虛擬樣機技術(shù)入門與提高[M]. 北京:機械工業(yè)出版社, 2001.Zheng Jianrong. ADAMS—Introduction and Improvement of virtual prototype technology[M]. Beijing: China Machine Press, 2001.
[6] 李團(tuán)結(jié), 朱超, 基于虛擬樣機技術(shù)的球形機器人的運動仿真研究[J]. 系統(tǒng)仿真學(xué)報, 2006, 18(4): 1026-1029.Li Tuanjie, Zhu Chao, Research on Motion Simulation of Spherical Robot Based on Virtual Prototype Technology with ADAMS[J]. Journal of System Simulation, 2006, 18(4):1026-1029.
Design of Virtual Prototype and Motion Simulation for a New Type of Spherical Robot
LIU Huan, ZHANG Yun-wei*, DAI Jing-lun
(School of Information Engineering and Automation, Kunming University of Science and Technology, Kunming 650500, China)
The design of a new spherical robot driven by double gear rack transmission mechanisms is proposed.As the driving mechanism inside, two sets of gear rack transmission mechanism are installed along the same radial direction of the spherical robot. And the force analysis is given for the straight motion and turning movement of the robot. The modeling of the virtual prototype and motion simulation of the spherical robot is developed by using SOLIDWORKS and ADAMS. Its force analysis and motion simulation verified the feasibility of structure of spherical robot. This work provides reliable references for the development of the physical prototype.
: Spherical robot; ADAMS; Virtual prototype; Motion simulation
TP391.9;TP24
A
10.3969/j.issn.1003-6970.2017.10.005
本文著錄格式:劉歡,張云偉,代進(jìn)輪. 一種新型球形機器人虛擬樣機的設(shè)計及運動仿真[J]. 軟件,2017,38(10):23-28
國家自然科學(xué)基金資助項目(51365019)
劉歡(1991-),女,碩士研究生,研究方向:智能機器人。
張云偉(1972-),男,云南昆明人,昆明理工大學(xué)教授、博士,主要研究方向:機器人學(xué)與機器人技術(shù)。