面向立木檢測的二維激光掃描圓弧檢測算法
2017-11-17 05:35:28王建利劉晉浩
森林工程 2017年6期
王建利,劉晉浩
(1.北京工商大學 材料與機械工程學院,北京 100048;2.北京林業大學 工學院,北京 100083)
面向立木檢測的二維激光掃描圓弧檢測算法
王建利1,劉晉浩2*
(1.北京工商大學 材料與機械工程學院,北京 100048;2.北京林業大學 工學院,北京 100083)
林區環境復雜,導致林用裝備在實現自動化、智能化時存在一定的困難,需要采用較為可靠的傳感器及技術手段對立木進行識別。但是由于立木樹徑差異大,現有的檢測手段難以準確的檢出。為實現林區活立木的檢測,可以通過二維激光掃描儀進行數據采集,通過對二維激光數據的濾波、分割和檢測等手段將活立木從林區場景中檢測到。本文將圖像處理中所采用的正切變換圓檢測方法引入到二維激光掃描數據處理中,通過分析極坐標特點,推導出極坐標下正切變換公式。將小圓木柱作為幼木,在實驗室內搭建幼木仿真環境,使用LMS511 Pro二維激光掃描儀采集仿真場景的二維激光數據,并進行數據處理。試驗證明,采用正切變換的方法可以在掃描數據點個數較少時檢測出被測目標是否由圓弧組成,并給出了判定系數為0.7,準確率可達90%。
立木;二維激光;圓弧檢測;正切變換
0 引言
立木位置信息是林業作業的一個關鍵信息,可以用于指導采伐、割灌和撫育等林地作業。獲得這一信息的手段目前主要以三維圖像和激光測量兩種手段為主,其中二維激光掃描由于其速度快,距離信息準確,在實際應用中具有廣闊的前景[1-5]。立木二維激光掃描測量是快速獲取林地中立木位置信息的重要手段,然而林地中除了立木,還包含許多雜物,如繁密的雜草、灌木。這些雜物可能會對立木的識別造成干擾,但立木在形態上與其他雜物有一些區別,主要表現為:立木的橫截面(立木與二維激光的掃描平面的截面)形狀可以看成近似圓形[6];而其他雜物不存在這樣的特征。因此可以利用這一差異來進行立木與林間雜物的區分。二維激光掃描儀在測量時僅能測得截面圓中可視的部分,其余部分由于被立木本身遮擋,而無法測得,因此,二維激光測量立木截面所得結果僅是圓上一部分圓弧。這樣,立木的檢測轉變為二維激光掃描數據中的圓弧檢測。
圓弧檢測算法在圖像處理領域研究較為廣泛,所采用的算法種類繁多,但主要可以分為兩個大類:①基于霍夫變換的算法;②基于邊緣鏈碼的檢測算法[7]。這兩類方法均能實現對原圖像中圓的檢測,但是常規的霍夫變換方法(SHT)在圓的三個參數(圓心坐標,半徑)均未知時,需要的計算量大,資源需求量大。而邊緣鏈碼檢測的算法更適合簡單背景圖像中圓的檢測[7]。為了克服霍夫變換在圓檢測中的計算量大的問題,許多改進的算法被提出,如Xu L等人在1993年提出的一種隨機霍夫變換(RHT)方法[8],該方法隨機的從數據中取三個點,通過霍夫變換,求得參數空間下的一個解,再對結果進行累積。RHT方法的計算量相比于SHT方法小,但對于變形厲害的圓形,檢測效果較差。此外,張運楚等提出的基于存在概率圖的檢測方法,能夠較為穩定可靠的檢測圓形[9],但其計算量大,內存占用較高[10]。
林業中立木測量方面,唐藝介紹了使用三維點云進行材積計算的方法[11],但其并沒有給出圓弧檢測方面的方法。王建利、王典等提出用差分方法、聚類方法對二維激光掃描中的立木進行提取[12-14],但是其文中所研究的場景相對簡單,被測目標距離掃描儀較近,測量數據點足夠多,而且并未提出確定被測數據是圓弧的檢測算法。圓弧檢測算法不同于圓弧擬合,檢測算法中首先要根據圓弧的特征確定被測目標是否為圓弧,而圓弧擬合方法是認為被測目標是圓弧,再對被測目標數據進行擬合,兩者的前提假設不同。
為了能夠更準確的檢測立木二維激光掃描數據中的圓弧特征,本文在總結以上研究的基礎之上提出一種基于正切變換的圓弧檢測算法。
2 正切變換算法原理
正切變換方法可以簡單的表述為:將原曲線向正切空間變換,用原曲線線段歸一化長度之和作為橫坐標,相鄰線段的偏轉角代數和作為縱坐標。對于二維激光掃描數據,其存儲格式為極坐標形式,有兩種方法完成正切變換,第一種是先將極坐標向直角坐標變換,再由直角坐標向正切空間變換;第二種是直接由極坐標空間向正切空間變換。從計算時間角度講,第二種方法更優,因為省去了一次變換的過程,因而計算步驟減少。然而現有的方法中沒有極坐標直接向正切空間變換的推導。本研究將極坐標下的正切變換進行了推導,以提高運算效率。

圖1 極坐標正切變換原理示意圖Fig.1 Tangent transform schematic in polar coordinates

下面對具體變換公式進行推導。設被測目標上有3個測量數據點,分別為A(α1,R1),B(α2,R2),C(α3,R3),如圖2所示,OA表示投射到A點的激光束,OB表示投射到B點的激光束,OC表示投射到C點的激光束。過點B分別向OA、OC作垂線,延長AB,記AB延長線與B到OC垂線夾角為ω,BC與B到OC垂線夾角為φ,BC與AB延長線夾角為γ。
觀察圖2中的兩條垂線,由幾何知識很容易得知,這兩條垂線的夾角為2θ,在此前提下,對極坐標下正切變換進行推導,在此規定:順時針方向為角度正方向,逆時針方向為角度負方向。
由幾何關系可得:
(1)
(2)
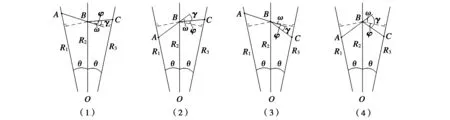
圖2 極坐標正切變換討論Fig.2 Polar tangent transform discussion
(3)
其中T.x表示正切變換后的x軸坐標,相應的T.y表示正切變換后的y軸坐標。
Nguyen等人證明了[15],對于圓弧P,當αi足夠小,使得sin(αi)與αi極為相近時,記T(i-1)2Ti1的中點為MpC,則MpC連線近似為直線。因此,通過正切變換可以通過對MpC直線的檢測來判斷原始曲線P是否為圓弧。
正切變換后中點序列MpC為:
(4)
前面主要介紹了正切變換的原理,此外,二維激光掃描數據由于設備具有系統誤差和隨機誤差,采集到的數據通常需要濾波去噪以及數據分割處理,再進行識別。因此應用正切變換的二維激光掃描數據的圓弧檢測算法可以分為以下幾個步驟:
(1)將采集得到的激光數據經過濾波器[16]進行濾波去噪,減小噪聲對數據的影響。
(2)使用差分法[16]將前景數據分割出來。
(3)對分割出的數據做正切變換,并對正切變換后中點數據進行直線擬合,獲得直線擬合決定系數。
(4)將得到的擬合系數與閾值對比,大于閾值,認為目標數據為圓弧,小于閾值,則不是。
3 實驗材料及數據顯示
為試驗所述檢測算法的可行性,在實驗室環境下搭建實驗環境,進行測試。實驗中以不同直徑的木柱為被檢測對象,通過二維激光掃描儀測量實驗數據,經過濾波、分割、變換和比較來進行檢測。具體實驗事項如下所述。
本次實驗所選用的二維激光掃描儀為SICK公司生產的LMS511 Pro型二維激光掃描儀,其測量角度最小分辨角為0.166 7°,測距精度為±12 mm,最大掃描距離80 m,最小掃描距離700 mm,最大掃描角度范圍190°,掃描頻率最高為100 Hz,實驗中所用配置為:0.166 7°分辨角,50 Hz掃描頻率,80°掃描角范圍。
除去掃描儀,數據采集系統還包括一臺便攜式計算機、鋰電池和導線若干。計算機上運行使用Matlab GUI自編的數據采集軟件,能夠對掃描儀進行常用設置,并每隔1 ms采集一組掃描數據,存儲于計算機內存及硬盤上,加上掃描儀掃描時間,兩次掃描實際時間間隔為21 ms。試驗設備如圖3所示。

圖3 試驗系統示意圖Fig.3 Experiment system graph
本測量算法的檢測對象為活立木幼木,在實際林地中人種植的幼木有固定的行距和株距,裝備在林地的行列之間的空地上行走,在實驗室環境下選用直徑5 cm的原木柱模擬活立木幼木,將木柱按4所示形式擺放在地板上,用于模擬車載激光掃描儀所觀測到的林地環境中的樹木。擺放時木柱擺成一個“M”形,掃描儀位于其中軸線上。其中貼近墻面的木柱,其柱面到墻面之間距離為2 cm,兩列之間距離為1.4 m。與木柱貼近的墻面用來模擬實際林地中的背景,木柱之間的間距分別表示林間的行距和株距。

圖4 木柱擺放方式示意Fig.4 Actual object placement map
圖
通過掃描儀掃描所得數據如圖5所示,圖中左上角視圖為整體掃描結果,其余視圖由上到下,由左到右分別為場景中的10個小木柱上的二維激光掃描數據分布情況。由圖5中可以看出,不同位置的木柱在掃描數據中均有對應的數據簇,但是由于掃描儀測量系統具有系統誤差及隨機誤差,使得測量結果中有些木柱測量點分布不似圓弧,增大了識別的難度。通過濾波和分割[14,16],然后對所分割的數據進行圓弧檢測。

圖5 掃描數據顯示Fig.5 Diagram of scan data of targets in the site
4 結果與分析
傳統的霍夫變換算法中若圓的半徑未知,在確定圓的參數時需要通過在參數空間內構建圓錐,最后對參數空間中的峰值點進行提取[17]。當數據中含有噪聲且數據點較少時,霍夫變換方法無法解決本研究中面臨的問題。
正切變換檢測結果如圖6所示,其中所標識的數值表示分割出的目標經過正切變換后直線擬合系數的分布情況,從圖中可以看出,經過分割后的數據中保留了大部分的木柱數據,且僅有少量的背景數據被誤分割出來。同時從所標識的直線擬合系數可以看出,分割出的木柱處的數據直線擬合系數一般大于0.70,可以判定為圓弧,而擬合系數小于0.70的數據,判定為非圓弧。圖6中一處數據區域擬合系數達到0.625,但與實際擺放的木柱位置對比可知,該位置處并無木柱擺放,出現如此高的擬合系數,可能是由于原始測量數據中出現的數據波動,經過濾波以后使得數據變得更加集中,又因數據點個數較少,才出現此現象。而圖6中在(-700,3600)處本應有一個木柱,算法確未檢出,而在數據中出現一個向內的凹陷。出現這種情況的原因可能是激光掃描儀與目標距離遠,落在其上的激光光斑數量低于3個,導致分割時丟棄,與可能是木柱的反光面無法使反射的激光滿足測量的需求,從而被掃描儀判定為無物體,從而呈現空值(超出掃描范圍,距離顯示為0)。避免這些情況發生的辦法就是多次測量,反復判斷。
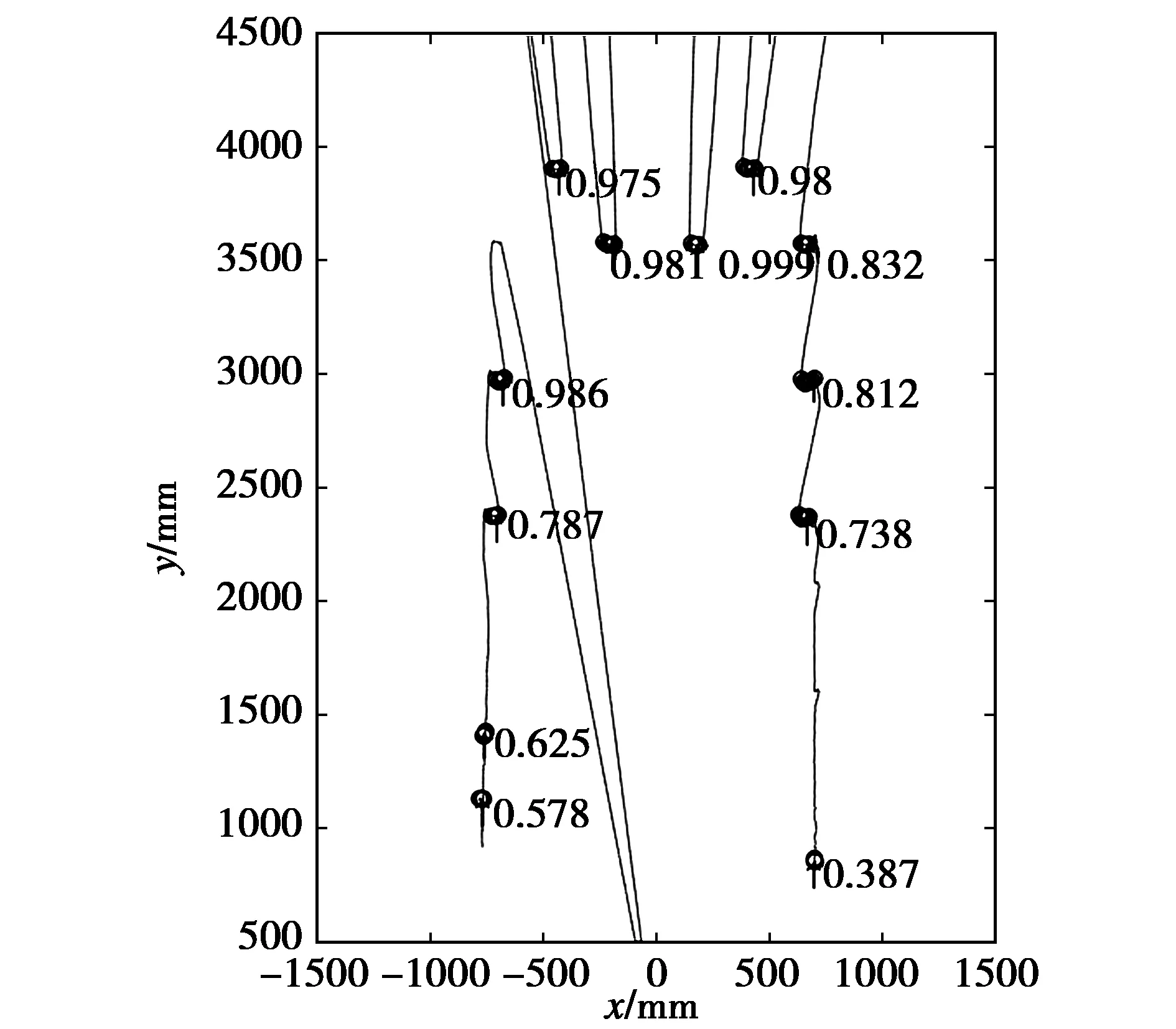
圖6 正切變換后直線擬合系數Fig.6 R-square values for linear fitting of the target data after tangent-transformation
通過以上實驗與對比,可以得到如下結論:
(1)當輸入數據個數較少時,無法使用霍夫變換、圓擬合等方法檢測輸入數據是否為圓弧。
(2)當輸入數據個數較少時,可以使用正切變換法檢測輸入數據是否為圓弧,并將正切空間下的直線擬合系數作為判定系數,當判定系數大于0.70時判定為圓弧,小于則不是。綜合分割算法,最終檢測準確率可達90%,十個木柱有九個正確檢出。
[1] 薛聯鳳,云挺,嵇俊,等.基于點云數據的闊葉樹葉片重建研究[J].森林工程,2015,31(1):6-11.
[2] 尤號田,邢艷秋,王萌,等.小光斑激光雷達數據估測森林生物量研究進展[J].森林工程,2014,30(3):39-42.
[3] 魏浩翰,何立恒,李杰.基于邊緣檢測濾波的機載激光雷達點云數據處理[J].森林工程,2013,29(6):17-20.
[4] 吳春峰,陸懷民,郭秀榮,等.利用三維激光掃描系統測量立木材積的方法[J].森林工程,2009,25(3):71-72+76.
[5] 曹軍,祝彥杰,王懷宇.論便攜式激光測距儀在森林調查作業中應用的可行性[J].森林工程,2004,20(2):11-12.
[6] 王典,王建利,李婷,等.基于光學相似三角形法的立木胸徑測量方法:中國,102927921A[P].2013-02-13.
[7] 蔡佳,黃攀峰,張彬.基于梯度的區域生長和距離直方圖的快速圓檢測方法[J].光學學報,2015,35(3):193-202.
[8] Xu L,Oja E.Randomized hough transform(RHT):basic mechanisms,algorithms,and computational complexities[J].CVGIP:Image understanding,1993,57(2):131-154.
[9] 張運楚,王宏明,梁自澤,等.基于存在概率圖的圓檢測方法[J].計算機工程與應用,2006,42(29):49-51.
[10] 何冰.基于幾何圖元識別的工業CT圖像自動矢量化研究[D].重慶:重慶大學,2011.
[11] 唐藝.基于三維激光掃描技術的活立木材積測量方法[D].北京:北京林業大學,2012.
[12] 王典,劉晉浩,王建利,等.林間作業環境內采育目標立木間株距的計算[J].湖北農業科學,2012,51(5):1017-1020.
[13] Wang J L,Wang D,Li T,et al.The adaptive calculation on the number of pixels in the parabolic segmentation grids of image for fusion with laser scanning points[J].Journal of Convergence Information Technology,2013,8(8):506-514.
[14] 王典,劉晉浩,王建利.基于系統聚類的林地內采育目標識別與分類[J].農業工程學報,2011,27(12):173-177.
[15] Nguyen T P,Debled-Rennesson I.Arc segmentation in linear time[C] .International Conference on Computer Analysis of Images and Patterns Springer-Verlag,2011:84-92.
[16] 王建利,劉晉浩,王典,等.基于差分計算的林木測量二維點云數據濾波[J].西北林學院學報,2012,27(3):193-196.
[17] 程鵬,朱美琳,耿華.一種基于梯度Hough變換和SVM的圓檢測算法[J].計算機與現代化,2013,1(2):22-26.
ArcDetectionAlgorithmof2DLaserScanningDataforStumpageDetection
Wang Jianli1,Liu Jinhao2*
(1.School of Materials Science and Mechanical Engineering,Beijing Technology and Business University,Beijing 100048; 2.School of Technology,Beijing Forestry University,Beijing 100083)
In complex forest environment,forestry equipment has some difficulties in the realization of intelligent automation,which demand robust sensor and technical method to recognize stumpage.However,due to large differences in tree diameter,the existing means of detection is difficult to accurately detect.In order to realize the detection of stumpage in forest,the data acquisition can be carried out by 2D laser scanner.Through the filtering,segmentation and detection of 2D laser data,stumpage can be separated from the forest.In this paper,the tangent transform circle detection method used in image processing is introduced into 2D laser scanning data processing.By analyzing the characteristics of polar coordinates,the tangent transforming formula in polar coordinates is derived.Take some small wooden as young trees and build the seedlings in the laboratory simulation environment.The LMS511 Pro 2D laser scanner is used to collect the 2D laser data of the simulation scene,and then the data are processed.The experiment shows that using the tangent transform can detect the arc-like object in spite of little scanning points,and the coefficient of determination 0.7 is given at the end of this paper,in which the accuracy rate can be up to 90%.
Stumpage;2D laser;arc detection;tangent transform
S 771.8
A
1001-005X(2017)06-0047-05
2017-06-02
北京工商大學青年教師科研啟動基金資助項目(QNJJ2016-13)
王建利,講師,博士。研究方向:二維激光測量,圖像測量方法。E-mail:wangjianli@btbu.edu.cn
*通信作者:劉晉浩。教授,博士。研究方向:森林工程裝備。E-mail:liujinhao@vip.163.com
王建利,劉晉浩.面向立木檢測的二維激光掃描圓弧檢測算法[J].森林工程,2017,33(6):47-51.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34