基于LabVIEW的助力輪椅車的智能控制及檢測系統研究
2017-11-21 03:03:56
傳感器世界 2017年6期
國家知識產權局專利局專利審查協作天津中心,天津 300304
一、引言
據普查數據顯示,我國下肢殘疾人士與老齡人口(60歲以上)占全國人口總數比可高達16.12%。這些人群面臨著出行或者行動不便的困境,由此帶來了一系列的社會問題。在此背景下,智能輪椅發展迅速,為肢體殘疾與行動不變的老人提供了諸多便利[1],助力輪椅車是其中之一。
助力輪椅車和普通手推輪輪椅操作一樣,但是由電機為使用者提供助力。使用者只需向前推動一下手推輪,驅動系統就會產生一定的持續助力來驅動輪椅前行;通過對手推輪剎車,根據剎車力大小,驅動系統就會減速或停止。前行過程中對某個車輪進行輕輕剎車,就能實現轉向[2]。此控制方式讓使用者適度活動上肢以保持其肩周的健康狀態,同時由于有助力的存在又避免使用者肩膀和關節的過度使用而產生疲勞。此外,助力的存在使輪椅快速、輕松行駛在草地、地毯等不良路況之上,而且幫助其輕松爬坡。相比于市場上流行的操控桿式電動輪椅,這款產品具有顯著的優點:保障驅動動力的同時,在操控方式上的創新,不僅讓使用者肩周得到鍛煉,而且具有一定的休閑性。助力輪椅車整體模型如圖1所示。
由于人手的力不能保證左右手完全相同、有障礙物對其中一支動力輪產生了阻礙、使用者誤操作等原因,左、右兩套獨立的力覺傳感系統會產生不同的力覺信號,從而造成應該直行的輪椅車轉向甚至急速掉頭,給使用者帶來麻煩,甚至產生事故,對使用者造成二次傷害。

針對助力輪椅車存在的不足,介紹了一種基于LabVIEW設計的助力輪椅車的智能控制及檢測系統。系統采用LabVIEW對兩輪的力覺系統進行數據采集、數據分析及顯示,并發出控制信號控制左、右輪運轉。針對輪椅直線運行時遇到的左右手完全相同、有障礙物對其中一支動力輪產生了阻礙、使用者誤操作等狀況,進行力覺傳感系統和左右驅動輪狀態的實時顯示,并將數據進行存儲,對數據進行分析后將其作為直行的特殊情況寫入控制系統,從而避免了輪椅車的誤動作。
二、助力輪椅車的組成及運動原理
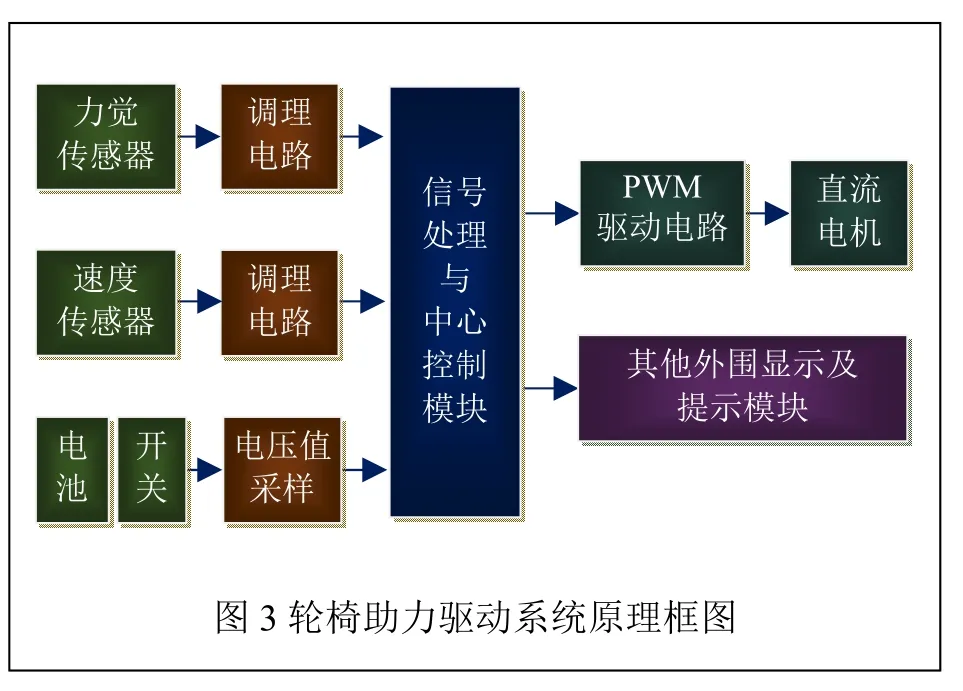
助力輪椅車驅動系統通過力覺傳感器系統探測使用者通過手推輪給系統的初始力大小、速度大小綜合控制直流驅動電機的輸出功率,經過一定的運算處理后,由控制器產生PWM波形控制直流驅動電機,合理調整直流驅動電機的輸出功率,實現對輪椅的綜合驅動[3]。
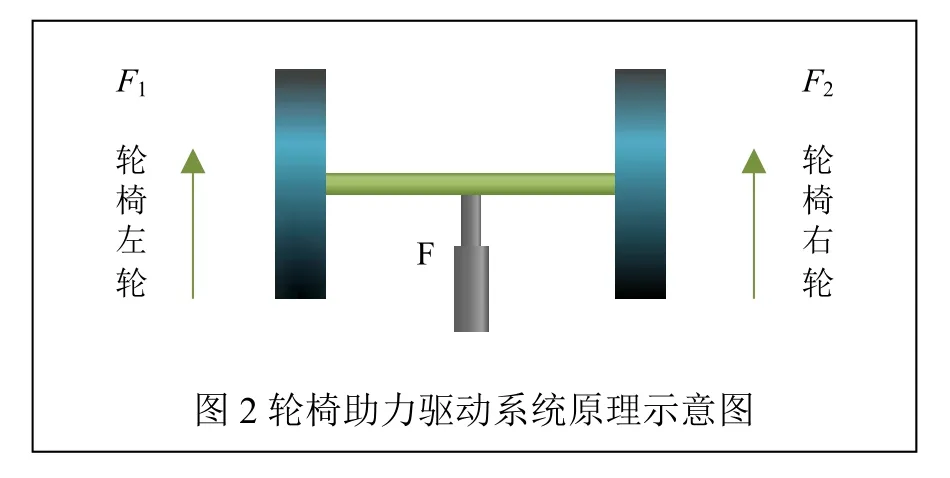
輪椅助力驅動系統原理示意圖如圖2所示。左、右輪由獨立的驅動系統進行驅動,當F1=F2時,輪椅直行;當F1〉F2時,輪椅右轉;當F1<F2時,輪椅左轉;F1和F2始終具有一個向前的合力F。
為了實現助力功能,整個系統包括以下模塊:力覺傳感模塊、輪速采集模塊、信號處理與中心控制模塊、動力驅動模塊。系統原理框圖如圖3所示。[4]
力覺傳感系統的主要方式[2-6]:
(1)為了采集使用者作用在手推輪上的力矩大小,因為有F=ma,加速度正比于力,所以可以通過采集加速度替代力的采集,所以選取了角加速度傳感器實時采集使用者推動輪椅時產生的加速度,角加速度傳感器與輪椅助力驅動系統的直流驅動電機連接在一起,以實現同步運轉,實時采集加速度的變化,作為輸入信號;
(2)采用扭矩傳感器直接采集使用者施加在手推輪上的力,通過傳送器傳送至信號處理中心進行處理,實現力覺采集;
(3)采用角度傳感器將手推輪相對于車輪的偏轉角度作為使用者施力的信號進行采集,通過傳送器傳送至信號處理中心進行處理,實現力覺采集;
(4)通過壓力傳感器采集手推輪相對于車輪的偏轉時作用在輪轂內的力作為使用者施力的信號進行采集,通過傳送器傳送至信號處理中心進行處理,實現力覺采集。
輪速采集系統速度采集并傳送至計算機后,此速度數據一方面傳輸至基于LabVIEW的助力輪椅車的智能控制及檢測系統進行顯示、分析、處理,另一方面實時監控輪椅車的運轉速度,當輪速超過10km/h后,啟動保護程序,對輪椅進行降速處理。
三、基于LabVIEW的控制及檢測系統設計
1、系統構成
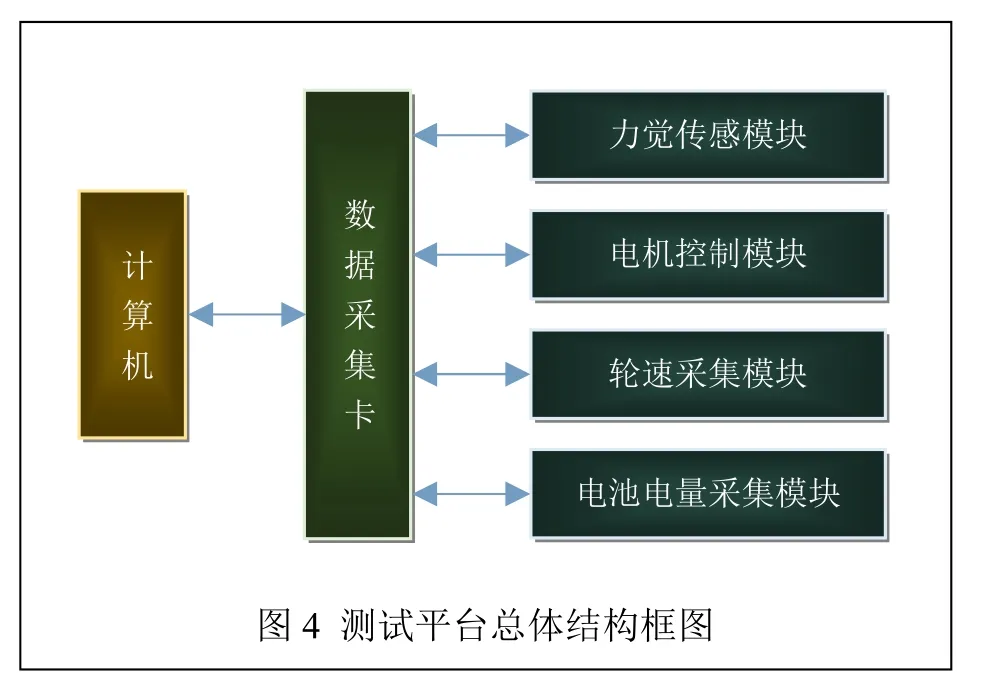
測試平臺總體結構框圖如圖4所示。系統的數據采集、控制利用LabVIEW應用軟件,通過NI數據采集卡進行。整個系統包括七個控制對象,分別是:左、右力覺傳感模塊、電機控制模塊、轉速采集模塊、電池電量采集模塊、DC程控電源模塊。
2、前面板
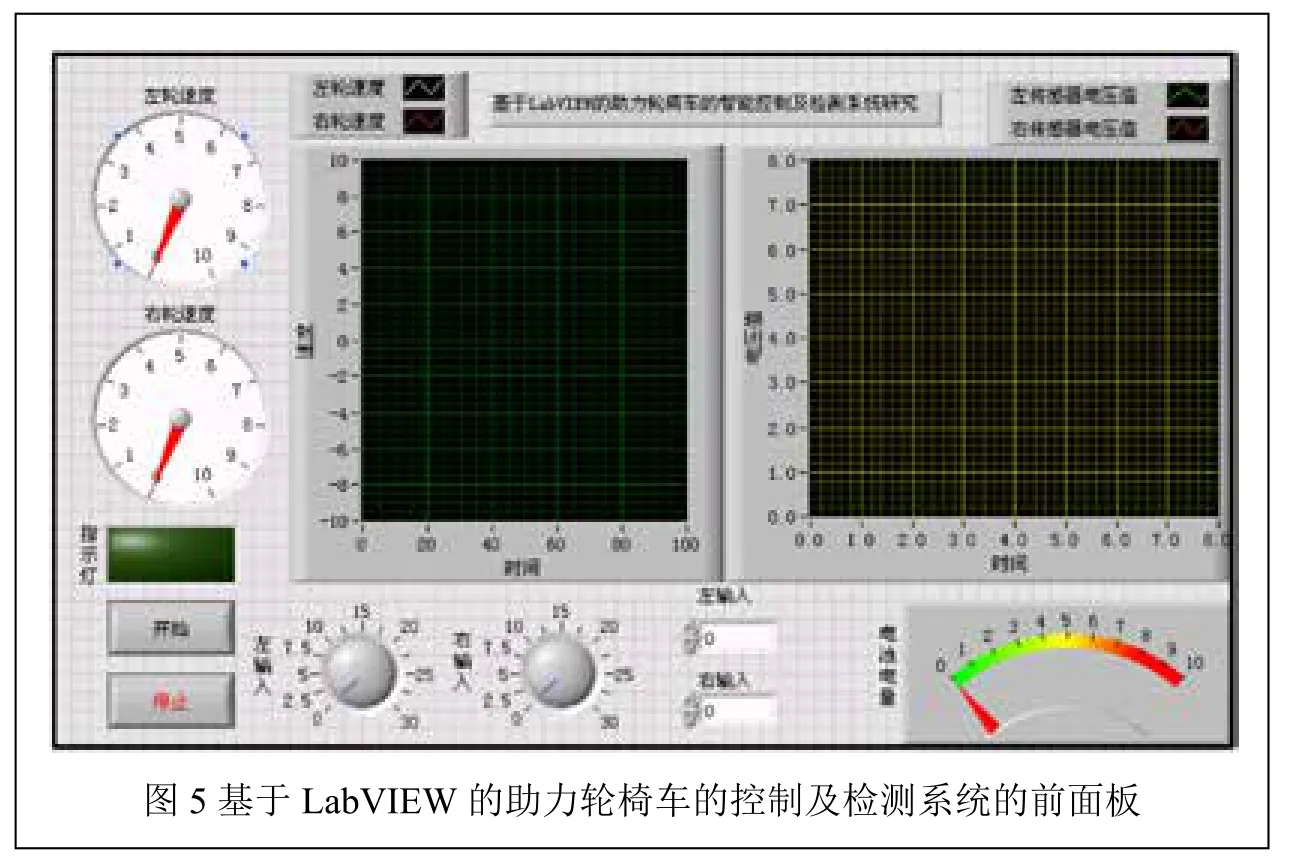
系統的前面板如圖5所示,具有模擬控制輸入部分和顯示部分。模擬控制輸入部分包括系統的啟動和停止按鈕,左、右輪的模擬力輸入。輪的模擬力輸入分為旋鈕式和數字輸入式輸入,數字輸入式輸入可以輸入精確的模擬力從而可以用來調試電機的控制,旋鈕式輸入可以逼真的模擬助力輪椅車的力量輸入,可以更好地模擬實際人力輸入。顯示部分包括左、右輪車速顯示、力覺系統采集到的信號顯示、電池電量顯示和運行狀態指示燈。車速顯示分為曲線顯示和儀表顯示。
3、主程序設計
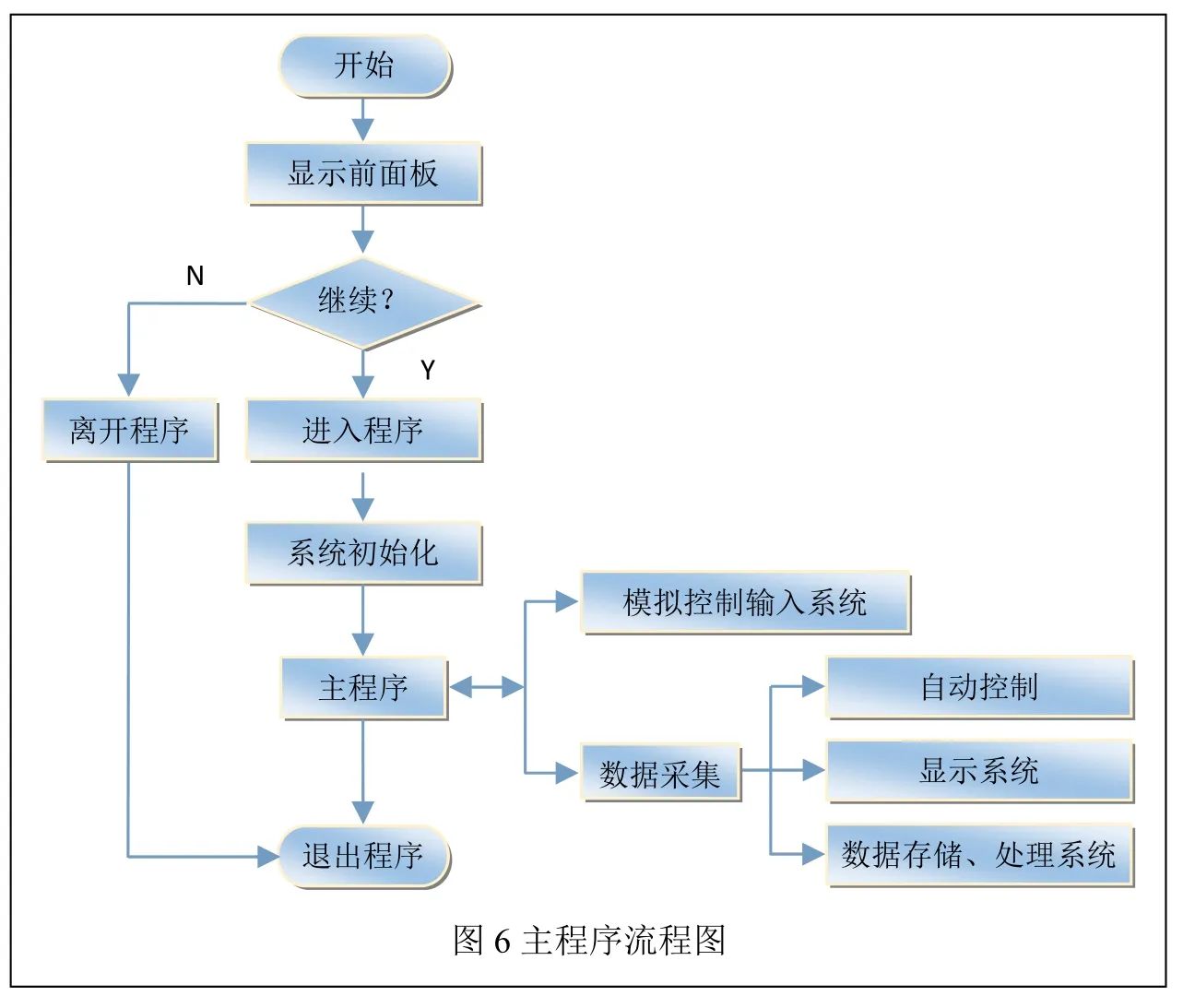
主程序流程如圖6所示。主程序的流程通過事先驅動的方式調用其他的模塊。當主程序運行時,首先進入前面板界面,點擊“開始”按鈕后,經過一系列初始化后,系統開始運行,當用戶開始使用輪椅車,數據采集模塊同步采集信號,系統響應并對輪椅進行相應的控制,同時將檢測結果在前面板顯示并自動存入數據庫;當通過操作前面板上的旋鈕或數字輸入窗口時,即可調用模擬控制輸入系統,實現模擬實際人力輸入進而完成輪椅車的控制。
四、結語
研制的基于LabVIEW的助力輪椅車的控制及檢測系統,通過實時顯示,針對輪椅直線運行時遇到的左右手完全相同、有障礙物對其中一支動力輪產生了阻礙、使用者誤操作等狀況進行力覺傳感系統和左右驅動輪狀態的實時顯示并將數據進行存儲,對數據進行分析后將其作為直行的特殊情況寫入控制系統,有效地解決了因受力不均而產生的兩輪動力不平衡,避免了輪椅車誤動作對使用者造成二次傷害的問題,而且 操作方式與普通手動輪椅的方式相同,操作簡單,使用戶的上肢得到一定的鍛煉,可以有效緩解殘障用戶的上肢萎縮的癥狀,具有良好的市場應用前景。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
科學大眾(2021年9期)2021-07-16 07:02:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
