指針式儀表讀數(shù)的機(jī)器視覺(jué)智能識(shí)別方法*
2017-11-23 02:09:26夏春華胡琳娜孟迎軍
傳感器與微系統(tǒng) 2017年11期
關(guān)鍵詞:檢測(cè)
施 瀅, 夏春華, 胡琳娜, 孟迎軍
(1.南京理工大學(xué) 紫金學(xué)院,江蘇 南京 210023; 2.農(nóng)業(yè)部南京農(nóng)業(yè)機(jī)械化研究所,江蘇 南京 210014)
指針式儀表讀數(shù)的機(jī)器視覺(jué)智能識(shí)別方法*
施 瀅1, 夏春華2, 胡琳娜1, 孟迎軍1
(1.南京理工大學(xué)紫金學(xué)院,江蘇南京210023;2.農(nóng)業(yè)部南京農(nóng)業(yè)機(jī)械化研究所,江蘇南京210014)
為快速準(zhǔn)確地自動(dòng)識(shí)別指針式儀表讀數(shù),采用機(jī)器視覺(jué)技術(shù),結(jié)合減影法和Hough變換法對(duì)儀表讀數(shù)進(jìn)行智能識(shí)別。對(duì)指針式儀表圖像進(jìn)行圖像二值化、形態(tài)學(xué)處理和邊緣檢測(cè)預(yù)處理;利用Hough變換檢測(cè)儀表中的指針,計(jì)算得到指針?lè)较蚝投ㄎ粓A形,實(shí)現(xiàn)指針式儀表的智能識(shí)別。實(shí)驗(yàn)結(jié)果表明:讀數(shù)識(shí)別的平均相對(duì)誤差為0.91 %,精度較高,能較好地識(shí)別指針式儀表讀數(shù)。
指針式儀表; 機(jī)器視覺(jué); 智能識(shí)別; Hough變換
0 引 言
指針式儀表讀數(shù)需要采用傳統(tǒng)的人工識(shí)別方法,存在耗時(shí)耗力、精度低、效率低等問(wèn)題。在不改造原有儀表表盤(pán)系統(tǒng)的基礎(chǔ)上,采用機(jī)器視覺(jué)技術(shù)對(duì)指針式儀表進(jìn)行自動(dòng)識(shí)別的方法,主要有減影法[1~3]、Hough變換法[4~8]等方法。李治瑋等人[1]提出了最大灰度相減法構(gòu)造出無(wú)指針儀表圖像模板,通過(guò)待測(cè)指針儀表圖像與模板圖像相減,得到僅包含指針的圖像,即獲得指針位置。減影法容易受光線干擾,造成輸出的像素灰度值偏差,進(jìn)而影響檢測(cè)出的指針位置。Hough變換法通過(guò)提取指針中心線,得到指針與零刻度線的夾角,該方法雖對(duì)光線干擾造成的指針斷裂有較好的魯棒性,但運(yùn)算量較大,影響實(shí)時(shí)性。
本文提出了改進(jìn)的指針式儀表智能識(shí)別方法,通過(guò)固定在儀表設(shè)備前的相機(jī)獲取指針式儀表圖像,對(duì)獲取的圖像進(jìn)行二值化、形態(tài)學(xué)和邊緣檢測(cè)處理的預(yù)處理,得到較為清晰的指針邊緣輪廓圖像;再利用Hough變換檢測(cè)儀表中的指針,計(jì)算得到儀表圓心和指針?lè)较颍鶕?jù)輸入的最大量程,實(shí)現(xiàn)智能識(shí)別儀表讀數(shù)。
1 指針式儀表圖像預(yù)處理
1.1 圖像二值化處理
為消除儀表圖像采集過(guò)程中光源條件、光線變化等因素造成的儀表圖像亮度不均勻現(xiàn)象,本文采用最大類(lèi)間方差法(OTSU)[9,10]將原始采集圖像進(jìn)行二值化處理。該方法是按照輸入圖像的灰度將圖像分成背景和目標(biāo),通過(guò)比較類(lèi)間方差大小來(lái)區(qū)分背景和目標(biāo)。
假設(shè)圖像f(x,y)的大小為M×N,分割目標(biāo)和背景的閾值為T(mén),總平均灰度為μ,類(lèi)間方差為g。目標(biāo)像素點(diǎn)數(shù)占整幅圖像像素?cái)?shù)的比例為w0,平均灰度為μ0;背景像素點(diǎn)數(shù)占整幅圖像像素?cái)?shù)的比例為w1,平均灰度為μ1。若一幅圖像中灰度值小于T的像素?cái)?shù)為N0,大于T的像素?cái)?shù)為
N1,則有
(1)

(2)
μ=w0×μ0+w1×μ1
(3)
g=w0(μ0-μ)2+w1(μ1-μ)2
(4)
將式(3)代入式(4)中,得到
g=w0w1(μ0-μ1)2
(5)
當(dāng)g最大時(shí),此時(shí)目標(biāo)和背景之間的差異最大,即為閾值T最佳。假設(shè)二值化后的圖像為g(x,y),則
(6)
1.2 圖像形態(tài)學(xué)處理
由于圖像二值化處理后得到的儀表指針的黑白圖像包括邊界點(diǎn),為得到清晰的指針圖像,需進(jìn)行圖像形態(tài)學(xué)處理。該處理通過(guò)圖像腐蝕方法使邊界向內(nèi)部收縮,通過(guò)圖像膨脹方法可以解決指針圖像間斷問(wèn)題,得到完整的指針圖像信息。腐蝕是對(duì)Z2上元素的集合A和集合B,B對(duì)A進(jìn)行腐蝕定義為:A⊙B={z|(B)z?A};膨脹定義為:A⊕B={z|()z?A≠?}。本文采用原點(diǎn)位于中心的3×3對(duì)稱(chēng)結(jié)構(gòu)元素進(jìn)行形態(tài)學(xué)開(kāi)運(yùn)算,可以平滑物體輪廓和消除突兀點(diǎn)。
1.3 邊緣檢測(cè)
本文采用Canny邊緣檢測(cè)算子[11],該算子有較好的抗噪聲干擾和較精確的邊緣定位。步驟為:1)用高斯濾波器對(duì)圖像進(jìn)行平滑;2)用一階偏導(dǎo)有限差分計(jì)算梯度幅值和方向,對(duì)梯度幅值進(jìn)行非極大值抑制;3)用雙閾值算法檢測(cè)和連接邊緣,得到邊緣圖像。
2 儀表讀數(shù)識(shí)別
2.1 儀表圓心的定位
采用Hough變換法,檢測(cè)指針式儀表中的指針。主要思想為將直角坐標(biāo)系中的直線轉(zhuǎn)換到參數(shù)空間[12,13]。
直角坐標(biāo)系中直線的方程為
y=kx+b
(7)
式中k為直線的斜率;b為截距。
參數(shù)空間表示為
ρ=xcosθ+ysinθ
(8)
式中ρ為原點(diǎn)到直線的垂直距離;θ為直線與x軸的角度。
直線上的所有點(diǎn)轉(zhuǎn)換到參數(shù)空間會(huì)相交于一點(diǎn),形成峰值。通過(guò)尋找累加器中最大值(最長(zhǎng)直線),即得到指針式儀表的指針。
通過(guò)2幅指針不在同一位置的儀表圖像進(jìn)行邏輯運(yùn)算,可以得到儀表表盤(pán)圓心的位置。本文采用儀表圖像背景為0,指針目標(biāo)為1,采用邏輯異或運(yùn)算,得到僅含有2個(gè)不同位置的指針圖像。根據(jù)Hough變換式(8),得到兩指針的直線方程分別為
ρ1=xcosθ1+ysinθ1
(9)
ρ2=xcosθ2+ysinθ2
(10)
儀表圓心的坐標(biāo)(x0,y0)如式(11)所示
(11)
2.2 指針?lè)较蚺袛?/p>
根據(jù)Hough變換式(8)找到表盤(pán)中最長(zhǎng)的直線,即為指針,記錄指針和零刻度線的夾角θ。由Hough變換得到的夾角θ存在2種可能:指針和零刻度線的夾角為θ;指針和零刻度線的夾角為θ+180°,因此,無(wú)法直接通過(guò)Hough變換得到針?lè)较颍枰M(jìn)一步判斷指針的方向。
在確定儀表表盤(pán)圓心的基礎(chǔ)上,由零刻度線和圓心建立直角坐標(biāo)系。Hough變換得到的指針的起始點(diǎn)和結(jié)束點(diǎn)以及建立的直角坐標(biāo)系,即可確定指針?lè)较颉?/p>
2.3 最大量程的設(shè)定
為提高本文改進(jìn)方法的廣泛適用性,用戶(hù)可輸入最大量程。設(shè)用戶(hù)給出需要智能讀數(shù)的指針式儀表的最大量程R和最大量程所對(duì)應(yīng)的最大夾角θm,則,此時(shí)指針式儀表的讀數(shù)r為
(12)
3 實(shí)驗(yàn)結(jié)果及分析
為驗(yàn)證本文方法的實(shí)際識(shí)別效果,選取了電力系統(tǒng)變電站的指針式電流表進(jìn)行實(shí)驗(yàn)與分析。電流表的參數(shù)為最大量程R=200 A、最大量程對(duì)應(yīng)的最大夾角θ=90°。改進(jìn)算法處理流程如圖1所示。
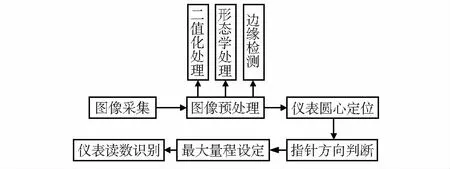
圖1 指針式儀表識(shí)別處理流程
3.1 指針式儀表圖像預(yù)處理實(shí)驗(yàn)
實(shí)驗(yàn)數(shù)據(jù)通過(guò)固定在電力系統(tǒng)變電站的電流表前的攝像裝置獲取,如圖2(a)和圖3(a)所示,其中,圖2(a)為電流表的初始狀態(tài),圖3(a)為電流表的指針偏轉(zhuǎn)某一角度。根據(jù)圖2(a)和圖3(a)的原始指針式儀表圖像,分別進(jìn)行圖像二值化反轉(zhuǎn)處理,其處理結(jié)果如圖2(b)和3(b)所示;再進(jìn)行形態(tài)學(xué)處理,如圖2(c)和3(c)所示;最后進(jìn)行邊緣檢測(cè),如圖2(d)和3(d)所示。
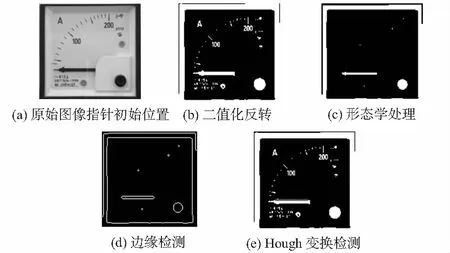
圖2 指針式儀表初始位置及處理后圖像
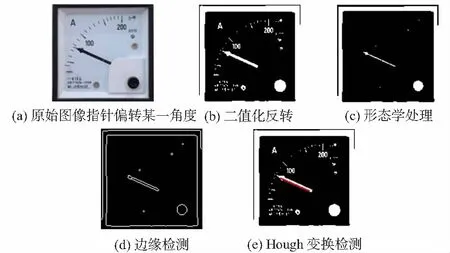
圖3 指針式儀表偏轉(zhuǎn)某一角度及處理后圖像
3.2 指針式儀表圓心定位實(shí)驗(yàn)
如圖2(e)和3(e)所示,為通過(guò)Hough變換檢測(cè)得到的指針位置,圖中直線為檢測(cè)到的電流表指針;通過(guò)對(duì)圖2(a)和圖3(a)兩幅指針在不同位置的圖像進(jìn)行異或運(yùn)算,得到只包含2個(gè)指針的灰度圖像,如圖4(a)所示;對(duì)圖4(a)進(jìn)行形態(tài)學(xué)處理,結(jié)果如圖4(b)所示;通過(guò)Hough變換得到兩指針?biāo)谥本€的位置(圖像經(jīng)反轉(zhuǎn)),如圖4(c)所示,圖中兩線為電流表指針;如圖4(d)所示,兩直線的延長(zhǎng)線的交點(diǎn)為儀表圓心位置,圖中點(diǎn)即為電流表圓心。
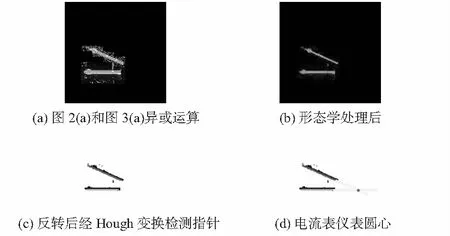
圖4 指針式儀表圓心定位
3.3 實(shí)驗(yàn)結(jié)果分析
實(shí)驗(yàn)選取不同大小的實(shí)際電流值,將實(shí)驗(yàn)分為10組,每組實(shí)驗(yàn)根據(jù)本文方法進(jìn)行5次讀數(shù)識(shí)別。如表1所示,為通過(guò)多次測(cè)試,本文改進(jìn)的指針式儀表智能識(shí)別實(shí)驗(yàn)結(jié)果,改進(jìn)方法的智能識(shí)別的讀數(shù)與實(shí)際值的平均相對(duì)誤差為0.91 %,表明該方法精確性較好。
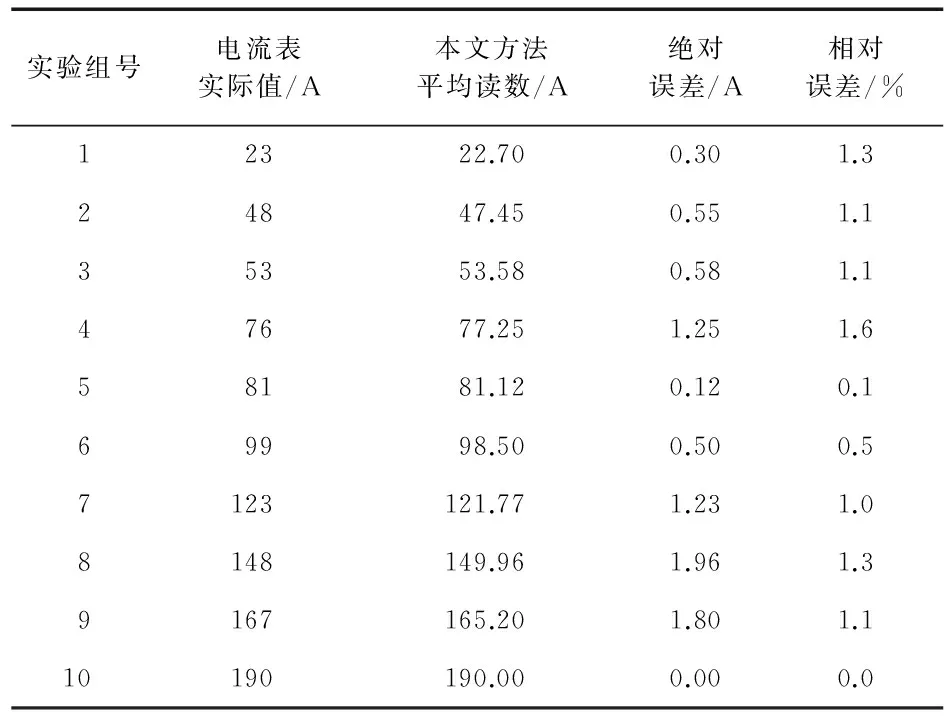
表1 本文方法實(shí)驗(yàn)結(jié)果
4 結(jié)束語(yǔ)
本文通過(guò)對(duì)指針式儀表圖像進(jìn)行預(yù)處理得到指針的邊緣輪廓,利用Hough變換檢測(cè)儀表中的指針,計(jì)算得到指針?lè)较颍?duì)儀表圓心進(jìn)行定位,能夠較好地完成指針式儀表的智能識(shí)別。通過(guò)對(duì)實(shí)際電力系統(tǒng)變電站的指針式電流表進(jìn)行測(cè)試實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明:本文改進(jìn)的智能識(shí)別方法,平均相對(duì)誤差為0.91 %,精確度較高,具有較好的實(shí)際應(yīng)用價(jià)值。
[1] 李治瑋,郭 戈.一種新型指針儀表識(shí)別方法研究[J].微計(jì)算機(jī)信息,2007,23(11):113-114.
[2] 王紅平,曹?chē)?guó)華,蘇成志.數(shù)字圖像處理技術(shù)在計(jì)量?jī)x表檢定中的應(yīng)用[J].長(zhǎng)春理工大學(xué)學(xué)報(bào),2004,27(3):13-15.
[3] Alegria E C,Serra A C.Automatic calibration of analog and digital measuring instruments using computer vision[J].IEEE Transactions on Instrumentation and Measurement,2000,49(1):94-99.
[4] 熊偉麗,周 寰,徐保國(guó).指針式壓力表自動(dòng)檢定系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].傳感器與微系統(tǒng),2009,28(8):105-107.
[5] 曾文靜,張鐵棟,萬(wàn) 磊,等.基于Hough變換的水下管道檢測(cè)方法[J].儀器儀表學(xué)報(bào),2012,33(01):76-84.
[6] Xu B,Liu D,Xu G,et al.A measurement method for contact angle based on Hough transformation[J].Measurement,2013,46(3):1109-1114.
[7] 周 泓,徐海兒,耿晨歌.基于HSI模型和Hough變換的指針式汽車(chē)儀表自動(dòng)校驗(yàn)[J].浙江大學(xué)學(xué)報(bào):工學(xué)版,2010,44(6):1108-1112.
[8] 滕今朝,邱 杰.利用Hough變換實(shí)現(xiàn)直線的快速精確檢測(cè)[J].中國(guó)圖象圖形學(xué)報(bào),2008,13(2):234-237.
[9] Ostu N.A threshold selection method from gray-level histograms[J].IEEE Trans on System,Man and Cybemetics,1979,6(3):62-66.
[10] 徐 青,范九倫.新的基于分解直方圖的三維Otsu分割算法[J].傳感器與微系統(tǒng),2017,36(1):119-122,126.
[11] 趙 炯,朱海濤,屈劍平,等.基于OpenCV的圓心定位在地鐵隧道變形監(jiān)測(cè)中的應(yīng)用[J].傳感器與微系統(tǒng),2013,32(11):139-142,145.
[12] 楊 莉,隋金雪,杜艷紅,等.改進(jìn)Hough變換在形狀檢測(cè)中的應(yīng)用[J].傳感器與微系統(tǒng),2007,26(5):86-89.
[13] 段汝嬌,趙 偉,黃松嶺,等.一種基于改進(jìn)Hough變換的直線快速檢測(cè)算法[J].儀器儀表學(xué)報(bào),2010,31(12):2774-2780.
Intelligentrecognitionmethodforreadingofpointerinstrumentbasedonmachinevision*
SHI Ying1, XIA Chun-hua2, HU Lin-na1, MENG Ying-jun1
(1.ZijinCollege,NanjingUniversityofScienceandTechnology,Nanjing210023,China;2.NanjingResearchInstituteforAgriculturalMechanization,MinistryofAgriculture,Nanjing210014,China)
In order to identify the reading of pointer instrument automatically and accurately,an intelligent recognition method of pointer instrument is proposed based on machine vision.The reading of pointer instrument is recognized based on machine vision,combined with image subtraction and Hough transformation.Pointer instrument image is preprocessed by image binarization,morphological processing and edge detection.Direction of the pointer and the position of the circle are determined by Hough transformation,in order to realize intelligent recognition method of pointer instrument.Experimental result shows that the average relative error is 0.91 %,the precision is high,the reading of pointer instrument can be recognized accurately by this method.
pointer instrument; machine vision; intelligent recognition;Hough transformation
10.13873/J.1000—9787(2017)11—0047—03
TP 391.4
A
1000—9787(2017)11—0047—03
2017—09—06
中央級(jí)公益性科研院所基本科研業(yè)務(wù)費(fèi)專(zhuān)項(xiàng)項(xiàng)目(S201715)
施 瀅(1990-),女,碩士,主要研究方向?yàn)闄C(jī)器視覺(jué)與圖像處理,E—mail:shiying05@163.com。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
