基于ADS-B信息的通航飛行沖突避讓算法研究
2017-12-01 00:35:14程擎黃俊賢郭文豪
航空工程進(jìn)展 2017年4期
程擎,黃俊賢,郭文豪
(中國民用航空飛行學(xué)院 空中交通管理學(xué)院,廣漢 618307)
基于ADS-B信息的通航飛行沖突避讓算法研究
程擎,黃俊賢,郭文豪
(中國民用航空飛行學(xué)院 空中交通管理學(xué)院,廣漢 618307)
隨著低空空域的開放和通用航空的發(fā)展,低空空域流量大幅增加,致使飛機(jī)飛行沖突事件呈多發(fā)態(tài)勢。為了解決低空沖突問題,基于廣播式自動相關(guān)監(jiān)視(ADS-B)信息的避讓算法,首先利用相對運(yùn)動關(guān)系對本機(jī)周圍的飛行狀況進(jìn)行分析,排除不存在危險(xiǎn)沖突的航空器;然后針對危險(xiǎn)接近的航空器,提出調(diào)整速度和改變航向兩種避讓策略;最后利用Matlab軟件,對兩種避讓算法進(jìn)行仿真分析。結(jié)果表明:算法正確有效,能夠快速辨別飛行沖突,并給出合理的避讓策略;調(diào)整航向的避讓算法,其有效性優(yōu)于調(diào)整速度的避讓算法,但在實(shí)際飛行中,由于調(diào)整速度的避讓方法更易操作且節(jié)約成本,應(yīng)優(yōu)先選擇調(diào)整速度的避讓方案。
通航;飛行沖突;廣播式自動相關(guān)監(jiān)視;相對運(yùn)動;沖突探測;沖突避讓
0 引 言
我國的航空商業(yè)運(yùn)輸主要集中于高空空域,有關(guān)高空空域的管理和硬件設(shè)施等研究均取得了豐碩的研究成果,而對于低空空域的研究則較少,制約了民航業(yè)的進(jìn)一步發(fā)展[1]。據(jù)統(tǒng)計(jì),美國通用航空機(jī)群占全美注冊民用航空器的96%,且這些飛機(jī)的累計(jì)飛行小時占民用飛行器總飛行小時的80%。可見,我國若想由航空大國發(fā)展成為航空強(qiáng)國,在低空空域的通航飛行上必須有所突破。
不同于中高空飛行,通用航空飛行器上并未安裝、也不適合安裝空中交通警戒與防撞系統(tǒng)(Traffic Alert and Collision Avoidance System,簡稱TCAS)[2],因此,無法進(jìn)行有效的沖突探測和避讓,這已成為限制通航流量增長的一個重要因素。隨著廣播式自動相關(guān)監(jiān)視(Automatic Dependent Surveillance-Broadcast,簡稱ADS-B)的迅速發(fā)展,ADS-B信息在民航領(lǐng)域得到了廣泛應(yīng)用,例如,羅文田等[3]提出了基于ADS-B數(shù)據(jù)的飛機(jī)預(yù)警防撞算法,該算法通過在航空器周圍建立碰撞區(qū)和保護(hù)區(qū),并確定告警門限來達(dá)到防撞的目的;戴超成等[4]提出了采用ADS-B的沖突飛機(jī)選擇算法,通過矢量比較排除無碰撞風(fēng)險(xiǎn)的航空器,提高了計(jì)算機(jī)對沖突的預(yù)測效率;R.Chamlou等[5]給出了兩種采用ADS-B的防撞算法:一種是結(jié)合TCAS系統(tǒng)和ADS-B信息評估航空器之間距離和高度的變化率,以達(dá)到防撞的目的,另一種是三維空間中航空器之間的沖突探測和解脫方法。但多數(shù)研究并未綜合考慮低空飛行情況,所建立的沖突探測或避讓算法不能完全適用于通航飛行。
ADS-B具有價(jià)格低,方位、速度信息精度高,監(jiān)視范圍廣,高速更新數(shù)據(jù)等特點(diǎn)[3]。通過ADS-B信息可實(shí)現(xiàn)飛行信息共享,使監(jiān)視人員獲取本區(qū)域或跨區(qū)域航空器飛行的監(jiān)視信息;加強(qiáng)空-空協(xié)同,實(shí)現(xiàn)航空器之間的相互監(jiān)視;最重要的是可有效避免因監(jiān)視問題而引起的飛行沖突。此外,ADS-B還可用于機(jī)場的地面活動區(qū)域,實(shí)現(xiàn)對場面上的航空器進(jìn)行全方位管理,建立一種不依靠監(jiān)視雷達(dá)的新型管理手段。因此,ADS-B必將成為未來通航的主要監(jiān)視技術(shù)[6]。建立一個適用于通用航空的基于ADS-B信息的沖突探測和避讓算法對于提高中低空飛行流量,改善飛行環(huán)境,促進(jìn)通航發(fā)展具有重要意義。
本文主要研究基于ADS-B的通航飛行沖突避讓算法,通過ABS-B中包含的豐富信息,對飛機(jī)間的運(yùn)動狀態(tài)進(jìn)行分析,并根據(jù)飛行性能提出合適的避讓策略,以期提高通航飛行的安全性。
1 算法建立
結(jié)合實(shí)際,建立算法之前存在如下前提:
(1) ADS-B是利用空-空和地-空通信手段,以先進(jìn)的導(dǎo)航系統(tǒng)及其他機(jī)載設(shè)備產(chǎn)生的信息為數(shù)據(jù)源,通過對外發(fā)送自身的狀態(tài)參數(shù),例如4D位置、3維速度、航跡(向)角信息等,同時也接收他機(jī)廣播的狀態(tài)參數(shù)信息,達(dá)到飛機(jī)與飛機(jī)之間、飛機(jī)與地面站之間的監(jiān)視目的[7-8]。由于ADS-B的位置信息來源于全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,簡稱GNSS)[9],速度航向信息來源于飛機(jī)本身,且信息更新速度快,達(dá)到1次/s或2次/s,完全能夠?qū)崟r反映飛機(jī)的狀態(tài)。
(2) 對于低空通航飛機(jī),其避免沖突的方式主要是高度調(diào)整、速度調(diào)整和改變航向[10],而針對水平方向上的速度和角度調(diào)整,目前仍缺乏有效的系統(tǒng)來提供所需信息,即使是成熟的TCAS Ⅱ系統(tǒng)也無法提供水平方向上的沖突解決方案,只能提供垂直方向上的避讓建議[11],故本文主要研究調(diào)速和改航算法。
(3) 除起飛和降落階段外,低空飛機(jī)一般是在固定的高度飛行,不會輕易改變飛行高度[12],而兩架不同高度的航空器也不存在飛行沖突,故將研究問題轉(zhuǎn)化為平面問題。
(4) 航空器在二維上存在水平安全距離R和保護(hù)區(qū),并且保護(hù)區(qū)是以R為半徑的圓。當(dāng)兩架飛機(jī)的“圓”區(qū)域相交時,即認(rèn)為發(fā)生沖突。
飛機(jī)物理運(yùn)動幾何關(guān)系如圖1所示。
坐標(biāo)系建立:以北端作為坐標(biāo)系y軸正方向,將本機(jī)(飛機(jī)A)置于原點(diǎn),并沿某一方向以某一速度飛行。定義飛機(jī)水平安全間隔R,其在不同飛行規(guī)則和管制條件下取值不同。引入聯(lián)合保護(hù)區(qū)的概念,即將其中一架飛機(jī)的保護(hù)圓疊加到另一架飛機(jī)上,將兩個保護(hù)圓的沖突避讓問題簡化為質(zhì)點(diǎn)與疊加保護(hù)圓的沖突避讓問題。例如將飛機(jī)A在原水平安全間隔RA的基礎(chǔ)上疊加RB,使問題簡化為他機(jī)(飛機(jī)B)與水平安全間隔為RA+RB的飛機(jī)A的沖突避讓問題。因此以飛機(jī)A為原點(diǎn),RA+RB為半徑的圓內(nèi)若有飛機(jī)B的存在,則兩機(jī)的保護(hù)區(qū)域必然已發(fā)生交叉,即發(fā)生飛行沖突。故本文討論的范圍不包含以飛機(jī)A為原點(diǎn),RA+RB為半徑的圓形區(qū)域,且飛機(jī)B在此區(qū)域內(nèi)沿某一方向以某一速度飛行。算法需要充分利用ADS-B報(bào)文提供的信息,例如坐標(biāo)、航向角、速度等。
2 沖突探測
第一步:由于ADS-B傳輸?shù)男畔孙w機(jī)的三維位置,不僅能顯示飛機(jī)的經(jīng)緯度,還能顯示基于WGS-84坐標(biāo)系下的幾何位置坐標(biāo)。故設(shè)兩架飛機(jī)的位置分別為(XA,YA)和(XB,YB)。當(dāng)飛機(jī)接收到他機(jī)發(fā)送的ADS-B報(bào)文時,可根據(jù)兩架飛機(jī)的坐標(biāo)判斷相互間的距離SAB:

(1)
隨時間推移,有:
(2)
第二步:由于ADS-B報(bào)文包含了飛機(jī)的三維速度信息,且此速度信息同樣使用WGS-84坐標(biāo),設(shè)兩架飛機(jī)的速度分別為VA=(VAsinα,VAcosα)和VB=(VBsinβ,VBcosβ),α為飛機(jī)A的航向角,β為飛機(jī)B的航向角。
VB-VA=(VBsinβ-VAsinα,VBcosβ-VAcosα)
(3)
式中:VB-VA為飛機(jī)B相對于飛機(jī)A的運(yùn)動速度矢量,即視飛機(jī)A靜止,飛機(jī)B的相對運(yùn)動速度方向和大小。
飛機(jī)B相對運(yùn)動軌跡的斜率K為
(4)
結(jié)合飛機(jī)B的坐標(biāo),得相對運(yùn)動軌跡方程為
Kx-y+(YB-KXB)=0
(5)
若飛機(jī)B在此運(yùn)動軌跡上與飛機(jī)A的最接近點(diǎn)大于等于聯(lián)合保護(hù)區(qū)半徑,則兩架飛機(jī)不存在沖突;反之,則有碰撞風(fēng)險(xiǎn)。兩架飛機(jī)最接近的距離為
(6)
若minSAB≥RA+RB,則兩架飛機(jī)無沖突;若minSABlt;RA+RB,則兩架飛機(jī)存在碰撞風(fēng)險(xiǎn),需要進(jìn)行避讓。
3 避讓算法研究
3.1 調(diào)速算法
如圖1所示,VB-VA斜率對應(yīng)的角度為θ,為了安全避讓,應(yīng)使θ≤γ或θ≥δ,才能保證兩架飛機(jī)在飛行中不會發(fā)生保護(hù)區(qū)的交叉。而由兩架飛機(jī)的坐標(biāo)可求得他們之間的距離SAB和直線AB的斜率K2:
(7)
由SAD=SAC=RA+RB和正弦定理可得:

(8)
則進(jìn)行避讓時,應(yīng)使
(9)
或
(10)
設(shè)VA調(diào)為飛機(jī)A調(diào)整后的速度大小,因?yàn)?/p>

(11)
(12)
則

或VA調(diào)=VB(cosβ-tanγsinβ)cosα-tanγsinαVA調(diào)=VB(cosβ-tanδsinβ)cosα-tanδsinαüty?????(13)
VA調(diào)應(yīng)在飛機(jī)速度上下限范圍以內(nèi)。由此可得調(diào)整的速度ΔV=VA調(diào)-VA,結(jié)果正號為加速,負(fù)號為減速。若為加速,則maxVA-VA≥ΔV≥VA調(diào)-VA;若為減速,則VA調(diào)-VA≥ΔV≥minVA-VA。
3.2 調(diào)整航向算法
設(shè)α調(diào)為調(diào)整后的飛機(jī)航向,要使飛機(jī)B從左側(cè)通過,則
(14)
由三角函數(shù)公式得
(15)
若式(15)中等號右邊的絕對值大于1,則表示此情況無法僅通過調(diào)整航向使飛機(jī)B由左側(cè)通過;若右邊的絕對值小于1,則

(16)
同理,要使飛機(jī)B從右側(cè)通過,則

(17)
實(shí)際飛行中,飛機(jī)的調(diào)整角度應(yīng)控制在90°范圍內(nèi),故α調(diào)∈(α-90°,α+90°)。
4 算法仿真
根據(jù)上述調(diào)整速度和角度的避讓算法,飛機(jī)A可通過接收飛機(jī)B的ADS-B報(bào)文,確定其相對于本機(jī)的坐標(biāo)和運(yùn)動速度,并根據(jù)實(shí)時變化的報(bào)文數(shù)據(jù),確定其是否對本機(jī)存在潛在威脅,如果存在潛在威脅,則應(yīng)進(jìn)行速度或角度調(diào)整。現(xiàn)通過Matlab R2008a版本軟件進(jìn)行仿真實(shí)驗(yàn),以驗(yàn)證算法的實(shí)用性和正確性,仿真流程如圖2所示。
研究區(qū)域是以本機(jī)為中心,30 km范圍的圓區(qū)域,飛機(jī)A的坐標(biāo)為(0,0),飛機(jī)B的坐標(biāo)為(XB,YB),兩機(jī)的航向角范圍為0°~360°,聯(lián)合保護(hù)區(qū)半徑為5 km[13],飛行速度上下界設(shè)置如表1所示,采用部分典型的通航飛機(jī)數(shù)據(jù)作為基礎(chǔ),具體數(shù)據(jù)由Matlab隨機(jī)產(chǎn)生。
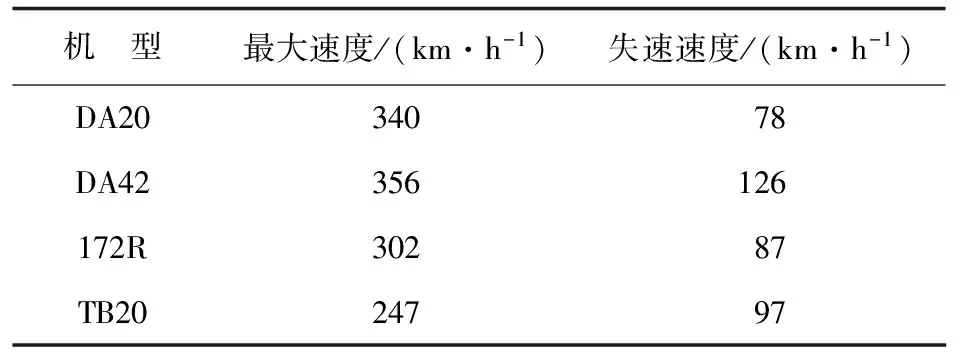
表1 飛機(jī)飛行速度的上下界
仿真過程中,在本機(jī)周圍隨機(jī)產(chǎn)生某型飛機(jī),研究兩機(jī)的飛行狀態(tài)和位置情況,并判斷是否存在沖突。累計(jì)實(shí)驗(yàn)1 000次后,沖突探測算法的排除效果和飛機(jī)的分布情況如圖3所示。
從圖3可以看出:在1 000次實(shí)驗(yàn)中,共排除906次安全飛行,篩選出94次存在沖突的情況,表明沖突探測算法可有效篩選沖突飛機(jī)。
對于調(diào)整速度的避撞實(shí)驗(yàn),產(chǎn)生的數(shù)據(jù)如下:飛機(jī)A(0,0),速度245 km/h,航向角180°,機(jī)型DA20;飛機(jī)B(-18 242,-19 925),速度210 km/h,航向角170°,機(jī)型TB20。根據(jù)探測算法,確認(rèn)兩架飛機(jī)在未來某時刻存在交叉沖突。
根據(jù)上述數(shù)據(jù),由調(diào)整速度算法計(jì)算可得:當(dāng)飛機(jī)A減速至234 km/h或加速至265 km/h時,未來兩機(jī)將不存在飛行沖突。飛機(jī)進(jìn)行調(diào)速后,可使兩機(jī)的最接近距離不小于5 km,即成功地避免了沖突問題,如圖4~圖5所示。
對于調(diào)整航向的避撞實(shí)驗(yàn),產(chǎn)生的數(shù)據(jù)如下:飛機(jī)A(0,0),速度156 km/h,航向角90°,機(jī)型TB20;飛機(jī)B(-19 974,-508),速度208 km/h,航向角90°,機(jī)型TB20。根據(jù)探測算法,確認(rèn)兩架飛機(jī)在未來某時刻存在同向沖突。
根據(jù)上述數(shù)據(jù),由調(diào)整航向算法計(jì)算可得:當(dāng)飛機(jī)A左偏至85.53°或右偏至95.54°時,未來兩機(jī)將不存在飛行沖突。飛機(jī)進(jìn)行調(diào)整航向后,可使兩機(jī)的最接近距離不小于5 km,即成功地避免了沖突問題,如圖6~圖7所示。
通過隨機(jī)產(chǎn)生機(jī)型、位置、速度和航向信息進(jìn)行100 000次實(shí)驗(yàn)以驗(yàn)證算法的有效性,仿真結(jié)果如表2所示。

表2 仿真結(jié)果
從表2可以看出:調(diào)整航向法較調(diào)速法效果更明顯,僅通過調(diào)整航向就幾乎能對所有的沖突進(jìn)行合理避讓;而調(diào)速法的效果則較差,只能滿足部分沖突情況的避讓要求,這是由于受自身速度上下界的限制所造成的;調(diào)速法的效果受飛機(jī)的飛行性能影響較大,一般速度上下界較寬裕的飛機(jī),調(diào)速法的效果更好,而調(diào)整航向法受影響程度則較小。在總的避讓效果上,本算法的避讓成功率維持在99.5%左右,即能通過調(diào)整航向或速度對絕大部分沖突進(jìn)行安全避讓。
每次沖突中調(diào)速方案的計(jì)算結(jié)果如圖8所示,可以看出:由于受自身速度上下界的限制,兩架飛機(jī)在發(fā)生沖突時,飛機(jī)能進(jìn)行調(diào)速安全避讓的可執(zhí)行方案大多只有一個(加速或減速),而能同時進(jìn)行加速和減速進(jìn)行避讓的情況則較少,表明在進(jìn)行調(diào)速避讓時,飛行員可選擇的余地不多,通常只能通過一個方案進(jìn)行沖突避讓。
每次沖突中調(diào)整航向方案的計(jì)算結(jié)果如圖9所示,可以看出:飛機(jī)能通過調(diào)整航向以安全避讓的方案大多有兩個(左偏和右偏), 只有唯一一個可執(zhí)行方案的情況則較少,表明在進(jìn)行調(diào)速避讓時,飛行員可選擇的余地較多。
綜上所述,在發(fā)生沖突時,調(diào)整航向法比調(diào)速法更有效,不僅體現(xiàn)在避讓的成功率上,還體現(xiàn)在可執(zhí)行方案的數(shù)量上。但在實(shí)際操作中,調(diào)速法更易操作也更節(jié)約成本,而調(diào)整航向需要進(jìn)行連續(xù)操作,并且會帶來額外的飛行路程,因此,若發(fā)生沖突,應(yīng)優(yōu)先考慮調(diào)速法進(jìn)行避讓,再考慮改變航向[14]。若是進(jìn)行目視飛行,相向沖突情景下,飛行器應(yīng)選擇向右規(guī)避沖突,并保持安全間隔通過[15]。
5 結(jié) 論
(1) 本文提出的基于ADS-B信息的通航飛行沖突避讓算法能有效排除與本機(jī)無沖突的飛機(jī),并在大部分發(fā)生沖突的飛行中通過速度和角度調(diào)整進(jìn)行安全避讓。
(2) 對比速度調(diào)整和航向調(diào)整兩種方法,航向調(diào)整的有效性要大于速度調(diào)整,但由于速度調(diào)整比較經(jīng)濟(jì)方便,故在實(shí)際飛行中應(yīng)優(yōu)先選擇速度調(diào)整方案,其次選擇航向(角度)調(diào)整方案。
[1] 朱代武. 低空空域飛行沖突避讓算法[J]. 交通運(yùn)輸工程學(xué)報(bào), 2005, 5(3): 73-76.
Zhu Daiwu. Calculational methods of avoiding flight conflict in low altitude airspace[J]. Journal of Traffic and Transpor tation Engineering, 2005, 5(3): 73-76.(in Chinese)
[2] 彭良福, 顏悅, 石佳奇, 等. 通航飛機(jī)避碰區(qū)域防撞模型的等效性研究[J]. 中國安全科學(xué)學(xué)報(bào), 2016, 26(8): 95-99.
Peng Liangfu, Yan Yue, Shi Jiaqi, et al. Equivalence study on collision avoidance zone based models for general aviation aircraft collision avoidance[J]. China Safety Science Journal, 2016, 26(8): 95-99.(in Chinese)
[3] 羅文田, 趙澤榮, 張德銀. 基于ADS-B的飛機(jī)預(yù)警避撞算法研究[J]. 控制工程, 2011, 18(4): 559-563.
Luo Wentian, Zhao Zerong, Zhang Deyin. Investigation of aircraft collision avoidance and early warning algorithm based on ADS-B[J]. Control Engineering of China, 2011, 18(4): 559-563.(in Chinese)
[4] 戴超成, 肖剛, 敬忠良. 采用ADS-B的沖突飛機(jī)選擇算法[J]. 電光與控制, 2011, 18(10): 11-14.
Dai Chaocheng, Xiao Gang, Jing Zhongliang. A selection algorithm of conflict aircrafts based on ADS-B[J]. Electronics Optics amp; Control, 2011, 18(10): 11-14.(in Chinese)
[5] Chamlou R, McLean, Virginia. Design principles and algorithm development for two types of NextGen airborne conflict detection and collision avoidance[C]. Integrated Communications Navigation and Surveillance(ICNS) Conference, 2010.
[6] 中國民用航空局. 中國民用航空ADS-B實(shí)施規(guī)劃[S]. 北京: 中國民用航空局, 2012.
Civil Aviation Administration of China. China’s civil aviation ADS-B implementation rules[S]. Beijing: CAAC, 2012.(in Chinese)
[7] Radio Technical Commission for Aeronautics. Minimum aviation system performance standards for automatic dependent surveillancebroadcast(ADS-B): RTCA DO-242A[S]. Washington D C: RTCA Inc, 2002.
[8] 程擎. 通信導(dǎo)航監(jiān)視設(shè)施[M]. 成都: 西南交通大學(xué)出版社, 2015.
Cheng Qing. Communication navigation monitoring facilities[M]. Chengdu: Southwest Jiaotong University Press, 2013.(in Chinese)
[9] Jae Honn Soon, Kyung Ryoon Oh. Prototype design of traffic information service-broadcast server using the ADS-B test-bed[C]. International Conference on Control, Automation and Systems, 2008: 1583-1586.
[10] Sridhar B. Optimal strategies for free flight air traffic conflict resolution[J]. Journal of Guidance Control and Dynamic, 2001, 33(2): 1-35.
[11] 丁騰躍. 民機(jī)TCAS沖突算法及仿真系統(tǒng)研究[D]. 上海: 上海交通大學(xué), 2013.
Ding Tengyue. Study on the algorithm and simulation of civil aircraft traffic collisions avoidance system[D]. Shanghai: Shanghai Jiao Tong University, 2013.(in Chinese)
[12] 郭茜, 聶潤兔, 王超. 蟻群算法在解決空中交通飛行沖突中的應(yīng)用[J]. 交通運(yùn)輸工程與信息學(xué)報(bào), 2009, 7(2): 116-119.
Guo Qian, Nie Runtu, Wang Chao. Aplication of ant colony algorithmto aircraft conflict resolution[J]. Journal of Transportation Engineering and Information, 2009, 7(2): 116-119.(in Chinese)
[13] 潘衛(wèi)軍. 空中交通管理基礎(chǔ)[M]. 成都: 西南交通大學(xué)出版社, 2013.
Pan Weijun. Basic air traffic management[M]. Chengdu: Southwest Jiaotong University Press, 2013.(in Chinese)
[14] Mao Zhihong, Etic Feron, Daid Dugail. Stability of intersectingaircraft flows under decentralized conflict avoidance rules[C]. Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2001.
[15] 牟奇豐. 空中交通管理中的防撞策略問題研究[D]. 成都: 西南交通大學(xué), 2010.
Mou Qifeng. Collision prevention strategy problem research in air traffic[D]. Chengdu: Southwest Jiaotong University, 2010.(in Chinese)
程擎(1972-),男,碩士,教授,碩導(dǎo)。主要研究方向:通信導(dǎo)航監(jiān)視技術(shù)及其相關(guān)應(yīng)用。
黃俊賢(1992-),男,碩士研究生。主要研究方向:通信導(dǎo)航監(jiān)視技術(shù)及其相關(guān)應(yīng)用。
郭文豪(1996-),男,本科生。主要研究方向:通信導(dǎo)航監(jiān)視技術(shù)及其相關(guān)應(yīng)用。
(編輯:馬文靜)
ResearchonFlightConflictAvoidanceAlgorithmBasedonADS-BInformationforGeneralAviation
Cheng Qing, Huang Junxian, Guo Wenhao
(College of Air Traffic Management, Civil Aviation Flight University of China, Guanghan 618307, China)
With the opening of low-altitude and development of general aviation, low-altitude airspace flow will increase dramatically, this is bound to cause more flight conflicts. To solve the problem of low-altitude conflict, a conflict avoidance algorithm based on ADS-B information is presented to offer the pilot with reasonable avoidance strategy if needed. Firstly, the safe aircraft is excluded after analyzing situation around the plane by using relative motion. And then collision resolution strategy for the potential conflict aircraft is researched, including course change and speed change. Finally, the algorithm is verified by computer simulation. Simulation results show that this algorithm is correct and effective, which can quickly find the flight conflict and give collision resolution strategy, and the validity of course change is better than speed change.
general aviation; flight conflict; automatic dependent surveillance-broadcast(ADS-B); relative motion; conflict survey; conflict avoiding
2017-07-18;
2017-09-16
中國民用航空飛行學(xué)院研究生創(chuàng)新項(xiàng)目(X2016-59)
黃俊賢,510814240@qq.com
1674-8190(2017)04-394-07
V328.3
A
10.16615/j.cnki.1674-8190.2017.04.005
猜你喜歡
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
中華手工(2017年2期)2017-06-06 23:00:31
小學(xué)生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32