磁懸浮式電磁-摩擦復合生物機械能量采集器?
2017-12-05 02:35:50溫濤何劍張增星田竹梅2穆繼亮韓建強丑修建薛晨陽
物理學報 2017年22期
溫濤 何劍 張增星 田竹梅2) 穆繼亮 韓建強 丑修建? 薛晨陽
1)(中北大學,電子測試技術重點實驗室,太原 030051)2)(忻州師范學院電子系,忻州 034000)
磁懸浮式電磁-摩擦復合生物機械能量采集器?
溫濤1)何劍1)張增星1)田竹梅1)2)穆繼亮1)韓建強1)丑修建1)?薛晨陽1)?
1)(中北大學,電子測試技術重點實驗室,太原 030051)2)(忻州師范學院電子系,忻州 034000)
(2017年4月11日收到;2017年7月31日收到修改稿)
能量采集技術已經成為智能終端領域的一項關鍵技術,關于人體機械能采集方式也有大量的研究.針對人體機械能采集的應用需求,本文提出一種基于磁懸浮結構的電磁-摩擦復合式能量采集器.該能量采集器以磁懸浮結構作為核心部件,具有結構簡單、感應靈敏、輸出功率高的優點.在10 M?的外接負載時,兩組摩擦發電單元輸出功率分別為0.12 mW和0.13 mW;在1 k?外接負載時,兩組電磁發電單元的輸出功率分別為36 mW和38 mW.復合能量采集器通過電容儲能后,電容器可以輸出8 V電壓,且輸出信號為持續的直流信號,可以為計步器提供持續的能量供給,支撐計步器正常工作.設計的復合能量采集器對于可穿戴電子設備自供電工作模式的實現具有重要意義.
磁懸浮,復合發電機,摩擦發電機,自供電計步器
1 引 言
在最近十幾年,移動智能終端和可穿戴式電子技術發展迅速,因為其便捷的操作和強大的功能而越來越普及,成為人類生活中不可缺少的一部分[1].目前,鋰離子電池是智能移動電子設備的主要供電方式,存在供電壽命短、環境污染等問題,嚴重限制了智能移動終端和可穿戴式電子技術的進一步發展.得益于低功耗技術的發展,微電子器件的耗電量已經從毫瓦(mW)量級減小到微瓦(μW)級.而且可以預測,將來電子設備耗電量可能僅為納瓦(nW)級.因此,采集環境能量為其供電是一種理想且有效的解決方案[2].
在所有的環境能量中,機械能具有分布廣泛、能量密度高等明顯優勢,電磁感應、壓電效應和磁致伸縮等物理原理被廣泛地用作相應器件的換能機理.除此以外,2012年佐治亞理工學院Wang等[3?7]利用摩擦起電和靜電感應的耦合作用發明了能將機械能轉化為電能的摩擦納米發電機.摩擦納米發電機因為其輸出電壓高、成本低、可選材料多等優點在機械能采集中有巨大的應用價值[8?11].然而,在已經報道的利用各種原理的機械能采集裝置中,存在較明顯的缺點:1)基于單一物理原理的裝置在能量轉換過程中換能效率低,大量能量以形變、熱量等形式耗散掉了;2)彈簧或懸梁結構通常用作機械能采集的俘能結構,在長時間的振動過程中容易造成機械疲勞和損壞,縮短器件的使用壽命;3)各種形式的機械能采集器件響應頻域窄,靈敏度低,需要較大的機械能輸入,對于低頻的微弱振動響應效果差.而且,在生物機械能采集領域發表的文章電磁感應原理、壓電效應和摩擦發電機有較多應用,但是其中電磁式的能量采集器靈敏度低,結構笨重(38 kg負載)[12];壓電式的能量采集器轉化效率低(最大功率500μW)[13],轉化的電能無法滿足智能終端的耗電需求;基于摩擦納米發電機的生物機械能采集器可以點亮大約十盞發光二極管(LED)燈,采集到的電能不足以支撐可穿戴智能設備穩定工作[14,15].
綜合以上分析,結合電磁感應發電機和摩擦納米發電機的特點,本文提出了一種基于磁懸浮結構電磁-摩擦復合能量采集器用于采集生物機械能.采用磁懸浮結構設計,使器件具有較高的靈敏性和更寬的響應頻域;復合式采集方式的設計降低了能量耗散,提高了器件輸出功率,可為智能移動終端和可穿戴式電子設備提供穩定持續的能量供給.本文提出的用于采集人體機械能的電磁-摩擦復合能量采集器,在有限的體積內集成了四組能量采集單元,結構輕便、靈敏性高、響應頻域寬、輸出功率高,總重量為80 g,體積為?4.8 cm×2.4 cm.電磁發電單元的輸出功率分別為36 mW和38 mW;摩擦發電單元的輸出功率密度分別為171 mW/m2和186 mW/m2.通過采集人體運動的機械能,器件可以為計步器提供正常工作所需的電能.
2 設計與原理

圖1 (網刊彩色)(a)復合能量采集器示意圖;(b)復合能量采集器分解示意圖;(c)裝配完成復合能量采集器照片;(d)復合硅膠薄膜表面形貌電鏡照片Fig.1.(color online)(a)Schematic diagram of the hybridized generator;(b)exploded view of the hybridized generator;(c)photograph of a fabricated hybridized generator;(d)SEM image of the prepared silica gel thin film.
本文中提出的電磁-摩擦復合式能量采集器以磁懸浮結構為基礎,集成了摩擦發電機(triboelectric nanogenerator,TENG)和電磁發電機(electromagnetic generator,EMG).能量采集器核心部件是磁懸浮結構:結構中心是一塊圓形磁鐵(厚度5 mm,直徑30 mm);在圓形磁鐵四周均勻分布三個磁柱(長度10 mm,直徑2 mm),磁柱的磁極和圓形磁鐵的磁極方向相反放置.由于磁場異性相吸的原理,圓形磁鐵磁場與其他三個磁柱磁場的相互吸引,圓形磁鐵呈現懸浮狀態.磁柱通過環形結構固定,由于受到重力影響,圓形磁鐵靜止位置略低于三個磁柱的幾何中心,設計過程中將圓環形支架底部增加一定厚度,使中心磁鐵懸浮于結構的幾何中心位置,如圖1(b)所示.在圓形磁鐵結構的上下位置各有一組銅線圈,為了在有限體積內獲得足夠大的感應電動勢,在結構上下位置各安放一組使用70μm漆包銅線繞制的螺旋線圈組.在圓形磁鐵上下表面各自黏貼有銅片作為電極,在空腔結構的內側各自黏貼有一組復合硅膠薄膜(hybridized silica gel thin film HSTF),構成兩組TENG.摩擦薄膜直徑設計為32 mm(略大于懸浮腔體直徑),厚度320μm.HSTF使用一種通用的復合室溫硫化型硅膠材料(hybridized silica gel,HSG),通過厚膜工藝在固定有金字塔砂碟片(厚度200μm)的平板表面均勻涂布一層300μm的硅膠層,加熱成型;然后在硅膠膜表面刮涂導電銀漿,待導電銀漿干燥后繼續涂布一層20μm厚硅膠作為保護層,固化成型后將一體式薄膜從平板上剝離后即獲得復合硅膠薄膜,其表面具有倒金字塔結構,如圖1(d)所示[16].將復合能量采集器組裝完成后,使用KEITHLEY6514靜電計對器件中的TENG和EMG在模擬振動環境下的開路電壓、短路電流、輸出功率進行測試.
復合式能量采集器以磁懸浮結構作為器件敏感單元,感受外部振動激勵.在外部振動激勵作用下,圓形磁鐵產生位移,并獲得一定的運動速度,同時TENG和EMG都會有電能輸出.在磁懸浮結構中,圓形磁鐵與周圍表面無接觸,沒有滑動摩擦力的影響,僅受到重力和磁場力作用.其中磁場力在水平方向上合力為零;圓形磁鐵的重力和磁場力在垂直方向上的分力相互平衡,圓形磁鐵處于靜止懸浮狀態(詳細分析見補充材料1(online)).基于牛頓運動定律分析,能量采集器受到的外部激勵可以等效為作用于圓形磁鐵的振動激勵.能量采集器受到外部激勵作用時,圓形磁鐵運動狀態發生改變,由于電磁阻尼作用,發生阻尼振動,其位移和速度隨時間衰減.如圖2所示,設計過程中使用Maxwell仿真軟件對磁懸浮結構磁感應強度分布和運動特征進行了模擬分析:模擬了靜態下圓形磁鐵在三個不同位置的磁場感應強度分布,模擬了圓形磁鐵在衰減運動過程在速度和位移變化曲線.在磁懸浮系統的振動過程中,由于電磁阻尼作用,實現了一次振動多次發電過程;基于對稱結構設計,實現四組換能單元共同發電,通過多組多次能量轉換實現能量采集器的性能提升.
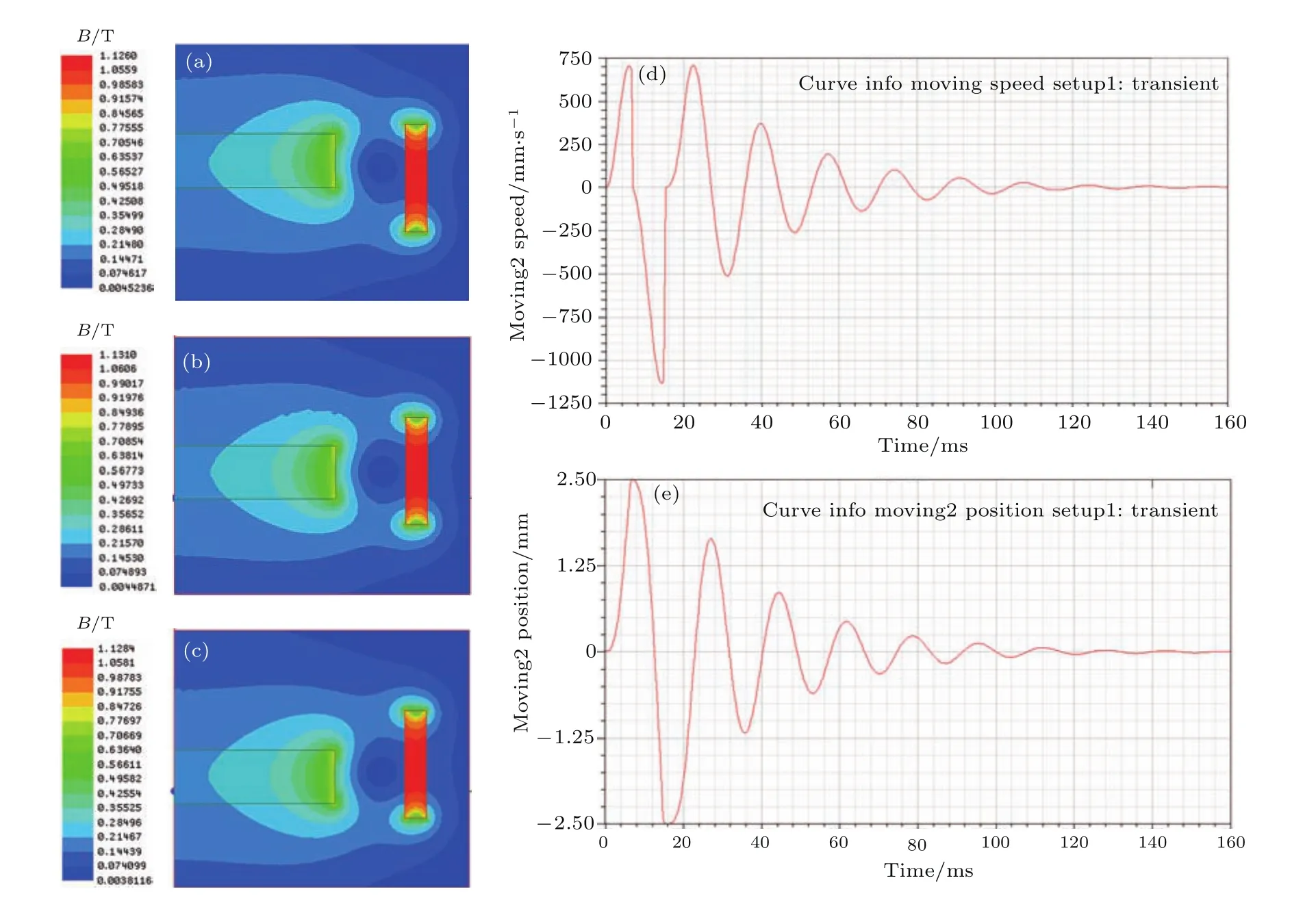
圖2 (網刊彩色)Maxwell仿真結果 (a),(b),(c)磁鐵處于最高、中間和最低位置時的磁場強度分布圖;(d),(e)磁鐵阻尼振動過程中位移、速度變化曲線Fig.2.(color online)Simulation results with Maxwell’s software:(a),(b),(c)The magnetic field intensity distribution when the magnets is in the highest position,the middle position and the lowest position;(d),(e)the displacement and velocity curves in the process of magnetic damping vibration

圖3 (網刊彩色)復合能量采集器采集過程中磁通量變化與電磁發電單元電流關系以及磁鐵上下移動過程中摩擦發電單元電流方向變化關系Fig.3.(color online)Schematic diagrams of the generation process of electricity,indicating the relationship between the direction of current flow,the change of magic flux,and the distance of separation.
當圓形磁鐵受到外部振動激勵時,磁鐵上下運動過程中通過兩組感應線圈內的磁通量會交替增大和減小.電磁感應定律基本公式給出了感應電壓與磁通量變化關系為

式中n為感應線圈匝數,E為感應電壓,?為磁通量.磁通量?=BS,磁感應強度B是與感應線圈到磁鐵表面距離χ相關的量,隨著距離的增加,磁感應強度減小,在較短距離內(|χ|<5 mm)這種相互關系可以近似為B=μχ.由以上分析可以推出:

V表示在器件軸線方向上磁鐵相對于感應線圈的速度.當磁鐵在能量采集器懸浮腔內運動時,上下兩組感應線圈(EMG1和EMG2)產生方向相反的感應電動勢,(2)式表明了感應電動勢方向與圓形磁鐵運動方向之間的關系,如圖3(a)和圖3(d)所示(補充材料1(online)).
在磁鐵受到較大外部振動激勵后,圓形磁鐵與結構內部上下表面HSTF發生接觸/分離.摩擦發電機是基于靜電感應和摩擦起電原理的新型電能采集方式,由于摩擦起電原理,在摩擦薄膜HSTF與金屬電極接觸/分離后,部分電子轉移到HSTF表面,在圓形磁鐵運動過程中,由于靜電感應,造成HSTF背部電極和金屬電極之間電荷的轉移.摩擦發電機可以等效為一個電容,其本征輸出性能(VOC,QSC和C)可以通過電動力學推導得到,其中開路電壓VOC表達式為

式中χ(t)為銅電極到HSTF表面的距離,σ為電荷量密度,ε0為空氣間隙相對介電常數[17].當磁鐵離開HSTF時,隨著位移的增大,開路電壓逐漸增大,當磁鐵向HSTF移動時,開路電壓逐漸減小;當磁鐵受到外部激勵往復運動時,兩組摩擦發電機交替輸出最大電壓和電流,如圖3(b)和圖3(c)所示(補充材料1(online)).
3 結果與分析

圖4 (網刊彩色)在2,6,10,14,20 Hz頻率下EMG和TENG的輸出性能 (a)EMG1開路電壓;(b)EMG1短路電流;(c)EMG2開路電壓;(d)EMG2短路電流;(e)TENG1開路電壓;(f)TENG1短路電流;(g)TENG2開路電壓;(h)TENG2短路電流Fig.4.(color online)Under the 2,6,10,14 and 20 Hz frequency,EMG output performance:(a)Open voltage of the EMG1;(b)short-circuit current of the EMG1;(c)open voltage of the EMG2;(d)short-circuit current of the EMG2;(e)open voltage of the TENG1;(f)short-circuit current of the TENG1;(g)open voltage of the TENG2;(h)short-circuit current of the TENG2.
為研究復合能量采集器輸出性能,實驗中使用JZK-10模態激振器對器件進行模擬振動測試.首先測試器件在不同頻率下的開路電壓和短路電流輸出特性,實驗中設置五個不同頻率(2,6,10,14,20 Hz).如圖4所示,隨著頻率的升高,能量采集器四個換能單元的開路電壓和短路電流均有明顯的升高;該復合式能量采集器具有較大的頻率響應范圍,從2 Hz到20 Hz都可以實現有效的能量轉換.在2 Hz頻率時,能量采集器外部激勵很微弱,作用在懸浮磁鐵上的等效作用力最大為0.025 N,在此條件下,TENG和EMG依然有電信號輸出,可以將很微弱的機械能轉換為電能,說明器件具有較高的靈敏度.而且在2 Hz頻率下各個換能單元輸出波形圖中可以發現,波形圖中出現多個波峰,在4個最高的波峰之間出項了明顯的幾個較小的波峰,這進一步驗證了磁懸浮結構運動特點,即一次外部振動激勵后可實現多次換能過程.

圖5 (網刊彩色)在20 Hz頻率、50 m/s2加速度下,EMG和TENG輸出性能 (a)EMG1開路電壓;(b)EMG1短路電流;(c)EMG2開路電壓;(d)EMG2短路電流;(e)TENG1開路電壓;(f)TENG1短路電流;(g)TENG2開路電壓;(h)TENG2短路電流Fig.5.(color online)Under the 20 Hz frequency and acceleration of 50 m/s2,EMG and TENG output performance:(a)Open voltage of the EMG1;(b)short-circuit current of the EMG1;(c)open voltage of the EMG2;(d)short-circuit current of the EMG2;(e)open voltage of the TENG1;(f)short-circuit current of the TENG1;(g)open voltage of the TENG2;(h)short-circuit current of the TENG2.
本文中介紹的能量采集器擬固定于人體小腿部位,根據人體運動力學的特點,我們將測試加速度設定為50 m/s2[18].從以上測試結果中可以發現復合式能量采集器在20 Hz時其輸出性能最優.為測試復合式能量采集器的最佳輸出性能,實驗中使用JZK-10模態激振器在20 Hz,50 m/s2條件下進行振動測試.從圖5中顯示的輸出波形可以看出:TENG1的開路電壓峰的峰值達到了70 V,短路電流峰的峰值為12μA,TENG2的開路電壓峰的峰值達到了71 V,短路電流峰的峰值為12μA;EMG1的開路電壓峰的峰值為10 V,短路電流峰的峰值為10 mA,EMG2的開路電壓峰的峰值為10 V,短路電流峰的峰值為8 mA.
為了獲得器件的最優輸出功率,實驗中測試了各個發電單元在50 m/s2加速度下不同負載時對應的輸出電壓,并通過負載電阻值和輸出電壓計算能量采集器四組采集單元各自的輸出功率.從圖6中可以看出,在外接負載為1000 ?時,EMG的輸出功率達到最大值,EMG1輸出功率為36 mW,EMG2輸出功率為38 mW;在外接負載為10 M?時,TENG輸出功率達到最大值,TENG1和TENG2的輸出功率分別為0.12 mW和0.13 mW.
在接入最優負載的條件下,根據(4)式可以計算出復合能量采集器4個換能單元輸出的電能,如圖7所示.相比于同類型的復合式生物機械能收集器輸出功率有顯著提升[19].

(4)式中U為在接入負載電阻時換能單元輸出的電壓;t1到t2的時間間隔表示圓形磁鐵從最高點運動到最低點所需的時間,同時四個換能單元完成了一次換能過程.從圖7中可以看出在單個振動周期內復合式能量采集器輸出的能量總和為750.89μJ.

圖6 (網刊彩色)EMG和TENG的輸出電壓與輸出功率的關系 (a)EMG1在不同外部負載下的輸出電壓和輸出功率的變化;(b)EMG2在不同外部負載下的輸出電壓和輸出功率的變化;(c)TENG1在不同外部負載下的輸出電壓和輸出功率的變化;(d)TENG2在不同外部負載下的輸出電壓和輸出功率的變化Fig.6.(color online)Dependence of output voltage and output power of EMG and TENG:(a)Dependence of output voltage and output power of the EMG1 on the external loading resistance;(b)dependence of output voltage and output power of the EMG2 on the external loading resistance;(c)dependence of output voltage and output power of the TENG1 on the external loading resistance;(d)dependence of output voltage and output power of the TENG2 on the external loading resistance.
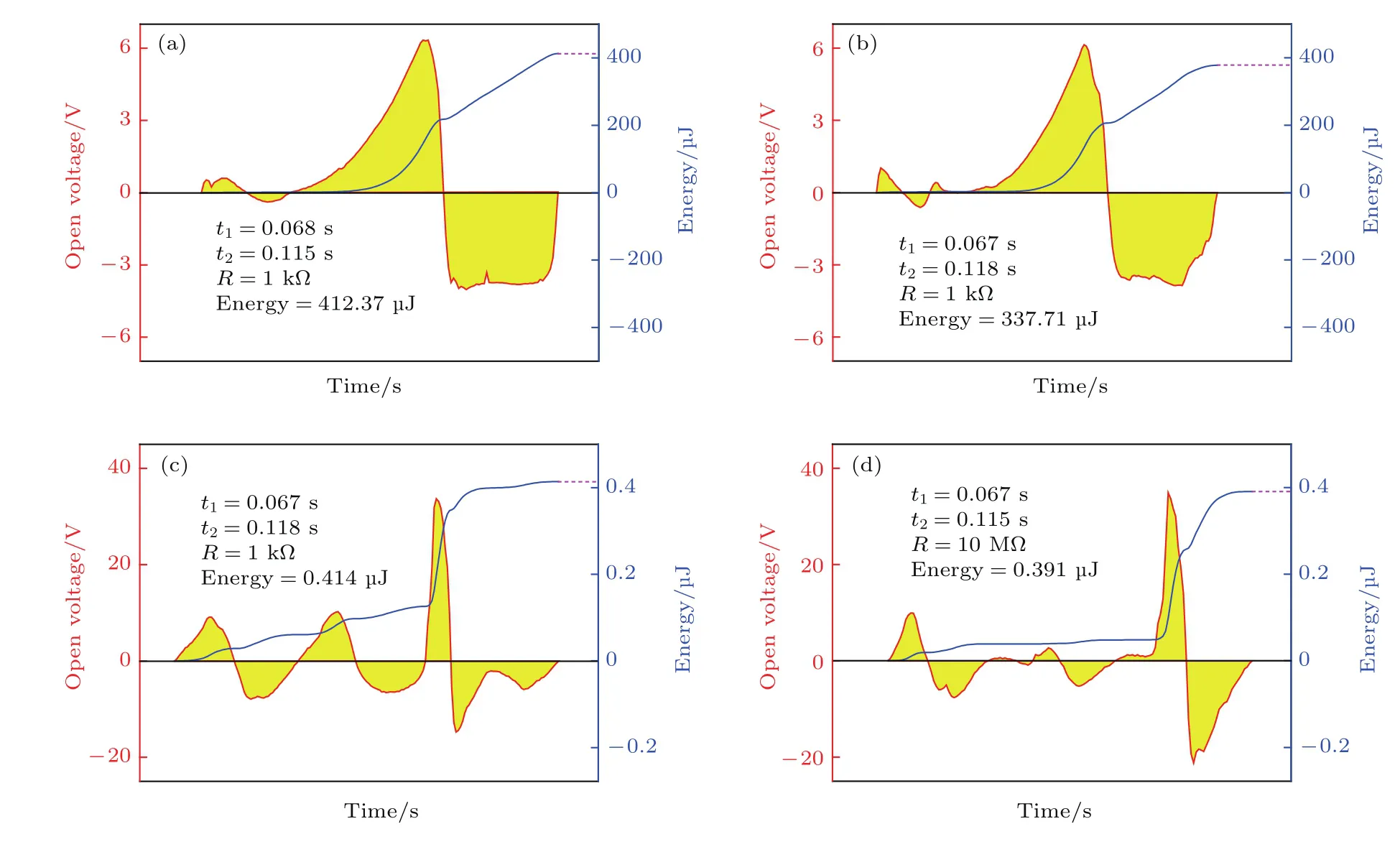
圖7 (網刊彩色)EMG和TENG在一次振動激勵下的輸出能量 (a)EMG1在負載電阻為1 k?時輸出的電能;(b)EMG2在負載電阻為1 k?時輸出的電能;(c)TENG1在負載電阻為1 M?時輸出的電能;(d)TENG2在負載電阻為1 M?時輸出的電能Fig.7.(color online)Energy of the EMG and TENG under a single vibration excitation:(a)Energy of the EMG1 on the external loading resistance;(b)energy of the EMG2 on the external loading resistance;(c)energy of the TENG1 on the external loading resistance;(d)energy of the TENG2 on the external loading resistance.

圖8 (網刊彩色)EMG在微弱振動激勵下的輸出能量 (a)EMG1在負載電阻為1 k?時輸出的電能;(b)EMG2在負載電阻為1 k?時輸出的電能Fig.8.(color online)Energy of EMG under weak vibration excitation:(a)Energy of the EMG1 on the external loading resistance;(b)energy of the EMG2 on the external loading resistance.
本文提出的復合式能量采集器設計固定于人體小腿部位,但是人體運動是一個相對復雜的過程,隨著體能的消耗,肢體動作會變得平緩.所以實驗中測試了在微弱振動條件下復合式能量采集器的電能輸出及換能效率,設置激振臺振動頻率f=0.5 Hz,加速度a=4 m/s2,振動臺振動位移S=0.5 mm.經典力學理論表述力做功的意義為一個力使得一個物體沿力的方向上移動,其計算公式如(5)式.由此可以計算出一次振動激勵對能量采集器輸入的振動能量W=160μJ.

式中W表示物體移動做的功即能量,F表示作用力,S表示力方向上的作用距離,m表示物體質量,a表示物體加速度值.
測試中發現,在上述測試條件下,TENG輸出信號極其微弱,可以忽略不計;電磁換能單元由于圓形磁鐵的阻尼振動出現衰減波形.如圖7所示,由(4)式計算得出EMG1和EMG2在負載電阻為1 k?時輸出能量分別為17.10,11.90μJ,能量采集器換能效率η=(17.10+11.90)/160=18%.
從以上測試數據中可以看出,各個發電單元輸出信號都是交流信號,而且TENG和EMG輸出性能也有較大的區別.TENG的開路電壓較高,短路電流較低,EMG的開路電壓相對TENG較小,短路電流是TENG短路電流的近1000倍.對于小型電子設備而言,需要直流信號來供電,且太高的電壓對其有損害作用,因此需要一種器件可以將能量采集器輸出的高電壓轉換成可供設備使用的低電壓,交流信號整流為直流信號[20].而且復合能量采集器的輸出信號是不穩定的信號,直接接入電路則無法提供持續的電量供給.基于以上分析,利用一種儲能裝置可以將輸出信號變為連續的直流低壓信號,這種儲能裝置有電容或者鋰電池[21,22].實驗中使用整流橋和電容接入復合式能量采集器和電路系統之間,實驗電路如圖9所示,復合能量采集器輸出電能經過整流后對電容充電,經過電容存儲后可以為智能設備提供持續的電能,而且可以避免輸出電壓的不持續[23].

圖9 整流充電測試電路Fig.9.Charging capacitance test circuit after recti fier.

圖10 (網刊彩色)(a)TENG1和TENG2對33μF電容充電時電容輸出電壓的變化;(b)EMG1和EMG2對33μF電容充電時電容輸出電壓的變化;(c)TENG1,TENG2,EMG1和EMG2同時對33μF電容充電時電容輸出電壓的變化;(d)復合能量采集器對電容充電后點亮25盞LED燈Fig.10.(color online)(a)Measured voltage of a 33μF capacitor charged by the TENG1 and TENG2 respectively;(b)measured voltage of a 33μF capacitor charged by the EMG1 and EMG2 respectively;(c)measured voltage of a 33μF capacitor charged by the TENG1 TENG2 EMG1 and EMG2 simultaneously;(d)hybridized generator drive 25 LEDs after charged capacitor.

圖11 復合能量采集器為計步器供電Fig.11.Hybridized generator drive a pedometer.
經過整流以后,TENG和EMG并聯接入電容器對其進行充電,電容器的輸出電壓是連續穩定的信號,這樣就將原來的能量采集器的脈沖信號源轉換為持續穩定的電源,如圖10所示.為了證明復合發電機輸出能量在經過轉換后依然可以提供足夠的能量供給,實驗中使用LED燈模擬一般負載,在圖中可以看出復合發電機可以點亮30盞LED燈,在持續供電過程中,LED燈沒有出現閃爍,在復合發電機停止工作后,電容器內存儲的電能依然可以為LED燈供給能量(視頻1(online)).
圖11所示為一個自供電的計步器系統,實驗中將能量采集器綁到模特小腿上,四組能量采集單元經過整流后并聯到電容兩端,電容輸出端接入計步器.在人腿部運動過程中,復合能量采集器可以驅動計步器工作.在模特運動5 s后,計步器開始工作,計步器可以記錄并顯示步數、距離、速度、持續時間、消耗卡路里等運動信息.在復合能量采集器停止工作后,電容器儲存的電能依然可以支撐計步器工作1—2 s(視頻2(online)).
4 結 論
本文實驗證明了復合能量采集器可以有效地將機械能轉化為電能,支持可穿戴智能設備連續穩定工作.該器件設計輕便,體積為?4.8 cm×2.4 cm,重量為80 g,適用于人體機械能采集.此復合能量采集器采用對稱設計,在有限空間內集成了更多的能量采集單元,采用磁懸浮結構,避免了摩擦對換能過程中能量的消耗;懸浮單元的阻尼振動使得更多的能量被有效地轉換為電能.一次激勵作用實現多組多次能量轉換的結構特性,使能量采集器具有良好的輸出性能.復合式能量采集器中EMG在1 k?負載下其輸出功率分別為35 mW和38 mW;TENG在10 M?負載下輸出功率分別為0.12 mW和0.13 mW,功率密度達到171 mW/m2和186 mW/m2,一次激勵輸出總能量為750.89μJ.通過整流和電容儲能轉換后,將復合發電機脈沖輸出轉變為連續直流電源型號,復合發電機可以持續點亮LED燈,而且可以支持計步器穩定工作.本文中設計的復合生物能量采集器是人體機械能采集的一種新型結構,對于可穿戴電子設備自供電工作模式的實現具有重要意義.
[1]Liu S Y 2014World Telecommunications12 38(in Chinese)[劉思言 2014世界電信 12 38]
[2]Wang Z L 2008Adv.Funct.Mater.18 3553
[3]Ron P,Roy K,Joe E,Phil J,Oh S,Pei Q B,Scott S 2001Proceeding of SPIE4329 148
[4]Fan F R,Tian Z Q,Wang Z L 2012Nano Energy1 328
[5]Zhu G,Pan C,Guo W,Chen C Y,Zhou Y,Yu R,Wang Z L 2012Nano Lett.12 4960
[6]Zhang K,Wang X,Yang Y,Wang Z L 2016ACS.Nano521 3529
[7]Han M,Zhang X S,Sun X M,Meng B,Liu W,Zhang H X 2014Sci.Rep.4 4811
[8]Wang X,Wang S,Yang Y,Wang Z L 2015ACS Nano9 4553
[9]Hu Y,Yang J,Niu S,Wu W,Wang Z L 2014ACS Nano8 7442
[10]Wu Y,Wang X,Yang Y,Wang Z L 2015Nano Energy11 162
[11]Fan F R,Tang W,Yao Y,Luo J,Zhang C,Wang Z L 2014Nanotechnology25 135402
[12]Rome L C,Flynn L,Goldman E M,Yoo T D 2005Science309 1725
[13]Khaligh A,Zeng P,Zheng C 2010IEEE Trans.Ind.Electron57 850
[14]Zhu G,Bai P,Chen J,Wang Z L 2013Nano Energy2 688
[15]Bai P,Zhu G,Lin Z H,Jing Q S,Chen J,Gong Z,Ma J S,Wang Z L 2013ACS Nano7 3713
[16]Zhang Z X,He J,Wen T,Zhai C,Han J Q,Mu J L,Jia W,Zhang B Z,Zhang W D,Chou X J,Xue C Y 2017Nano Energy33 88
[17]Niu S M,Wang Z L 2015Nano Energy14 161
[18]Peng L 2009M.S.Dissertation(Hefei:University of Science and Technology of China)(in Chinese)[彭雷 2009碩士學位論文(合肥:中國科學技術大學)]
[19]Zhang K W,Wang X,Yang Y,Wang Z L 2015ACS Nano9 3521
[20]Leng Q 2015M.S.Dissertation(Chongqing:Chongqing University)(in Chinese)[冷強 2015碩士學位論文 (重慶:重慶大學)]
[21]Guo H Y,He X M,Zhong J W,Zhong Q Z,Leng Q,Hu C G,Chen J,Li T,Xi Y,Zhou J 2014J.Mater.Chem.2 2079
[22]Zhong Q Z,Zhong J W,Hu B,Hu Q Y,Zhou J,Wang Z L 2013Energ.Environ.Sci.6 1779
[23]Niu S M,Liu Y,Zhou Y S,Wang S H,Lin L,Wang Z L 2015IEEE Trans.Electron Dev.62 641
PACS:84.70.+p,41.20.–q,41.20.Cv,77.84.–sDOI:10.7498/aps.66.228401
*Project supported by National High Technology Research and Development Program of China(Grant No.2015AA042601)and the National Natural Science Foundation of China(Grant Nos.61525107,51605449,51422510,51675493).
?Corresponding author.E-mail:chouxiujian@nuc.edu.cn
?Corresponding author.E-mail:xuechenyang@nuc.edu.cn
Electromagnetic-triboeletric hybridized generator based on magnetic levitation for scavenging biomechanical energy?
Wen Tao1)He Jian1)Zhang Zeng-Xing1)Tian Zhu-Mei1)2)Mu Ji-Liang1)Han Jian-Qiang1)Chou Xiu-Jian1)?Xue Chen-Yang1)?
1)(North University of China,Science and Technology on Electronic Test and Measurement Laboratory,Taiyuan 030051,China)2)(Department of Electronics,Xinzhou Teachers University,Xinzhou 034000,China)
11 April 2017;revised manuscript
31 July 2017)
The popularity of various portable electronics and biological health monitoring devices,such as pedometers,pulse oximeters,mobile telephones,wearable watches,has greatly changed our lifestyles and brought signi ficant convenience to us.Energy harvesting has been a key technology for the self-powered mobile terminals,because there are many defects such as limited lifetime,large size,low energy density and environmentally unfriendly feature for the traditional chemical batteries.Lots of devices used for the energy harvesting of the human movement have been reported.However,some problems such as poor efficiency,low output power and low sensitivity need further studying.
In this work,we demonstrate a novel magnetically levitated electromagnetic-triboelectric generator.The device size is?4.8 cm×2.4 cm,and its weight is 80 g.The device uses the magnetically levitation structure as the core components,and the structure contains four magnets to form a magnetic array,in which three cylindrical magnets are placed around a bigger magnet.And two coils with polyvinyl-acetal enameled copper wires of 70μm areplaced at the top and bottom of the device,respectively.Then two silica gel thin films with inverted tetrahedron patterned on the surface are integrated inside the structure.Then,we analyze the motion feature with the Maxwell simulation software,and discuss output characteristics of the two energy harvest units theoretically.
The device possesses a high sensitivity,wide frequency response and high output performance.The dynamic response characteristics are analyzed in this paper.The frequency response range of the device is from 2 Hz to 20 Hz.The wider frequency response means that it can harvest more energy from complicated external environment.Furthermore,we analyze the output signal at low frequency,which has more than one wave crest after an environment perturbation.The triboelectric units can deliver peak output voltages of 70 V and 71 V,respectively,and the electromagnetic units each can deliver a peak output voltage of 10 V.In addition,the triboelectric units can produce peak output powers of 0.12 mW and 0.13 mW,respectively,under a loading resistance of 10 M?,while the electromagnetic units produce peak output powers of 36 mW and 38 mW,respectively,under a loading resistance of 1 k?.We discuss the energy output and energy conversion efficiency of the device,which are 750.89μJ and 18%,respectively.Then we use the hybridized generator to charge a capacitor of 33μF,the output voltage of which can reach 8 V in 2 seconds.Furthermore,the hybridized generator can power a pedometer continuously,which can work steadily and display movement data.This work has a signi ficant step toward human mechanical energy harvesting and potential application in self-powered wearable devices.
magnetic levitation,hybridized generator,triboelectric generator,self-power pedometer
10.7498/aps.66.228401
?國家高技術研究發展計劃(批準號:2015AA042601)和國家自然基金(批準號:61525107,51605449,51422510,51675493)資助的課題.
?通信作者.E-mail:chouxiujian@nuc.edu.cn
?通信作者.E-mail:xuechenyang@nuc.edu.cn
