汽車發動機主動懸置振動控制策略研究
2017-12-06 02:37:19潘公宇景雙龍肖云強
重慶理工大學學報(自然科學) 2017年11期
潘公宇,景雙龍,肖云強
(江蘇大學,汽車與交通工程學院, 江蘇 鎮江 212013)
汽車發動機主動懸置振動控制策略研究
潘公宇,景雙龍,肖云強
(江蘇大學,汽車與交通工程學院, 江蘇 鎮江 212013)
為解決發動機振動和路面激勵引起的整車振動,提出了一種包含壓電陶瓷主動懸置的雙環控制。外環控制器主要用來控制發動機的垂直、俯仰與側傾運動,從而穩定發動機的姿態;內環控制是采用4個獨立的控制器分別控制每個壓電懸置產生主動控制力,從而抑制路面不平度對車身的干擾。通過邏輯控制器實現內外環的有效連接。仿真結果表明:相比于傳統模糊控制和被動懸置系統,主動懸置的雙環控制方法能抑制發動機振動和車身振動,提高汽車行駛平順性。
壓電陶瓷作動器;主動懸置;雙環控制;SIRMs模糊控制
隨著道路交通的發展以及汽車行駛車速的提高,汽車乘坐舒適性成為人們關注的焦點,而發動機作為汽車的動力源所引發的振動越來越被人們所重視。傳統的發動機被動懸置已無法滿足人們的要求,而主動懸置由于其動態范圍寬、響應速度快、功耗低已成為當前研究的熱點[1-3]。
目前,國內外學者對于發動機主動懸置控制進行了大量的研究,但主要致力于衰減發動機振動向車架及車身的傳遞[4]。懸置連接在發動機與車架之間,一方面需要阻止發動機向車架傳遞振動力,另一方面也要阻止路面不平激勵對發動機產生的振動影響。本文將以上2個目的為目標,構建整車主動懸置的雙環控制,從而提高汽車整車的平順性。
1 壓電作動器主動懸置模型
1.1 壓電作動器特性及壓電方程
壓電作動器具有良好的機電耦合特性,適合在振動控制作為驅動器[5-6]。厚型壓電作動器是由幾十個甚至上百個堆疊在一起的薄型壓電陶瓷作動器基于力學串聯組成的,見圖1。
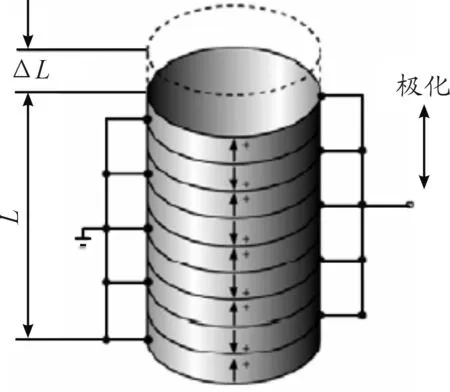
圖1 壓電堆示意圖
根據壓電陶瓷的力學特性可以得到壓電陶瓷的輸出變形和輸出力方程[7]:
(1)
式(1)反映了某一壓電作動器加載電壓、作動反力和驅動位移三者之間的理論關系。
1.2 壓電陶瓷作動器的實驗研究
本文對壓電陶瓷作動器進行的理論分析不能驗證壓電陶瓷作動器在實際使用中的特性,同時壓電陶瓷作動器的使用參數也不能通過理論分析得到。因此,本文建立了壓電作動器的實驗臺,通過一系列的實驗來探索壓電作動器的特性。
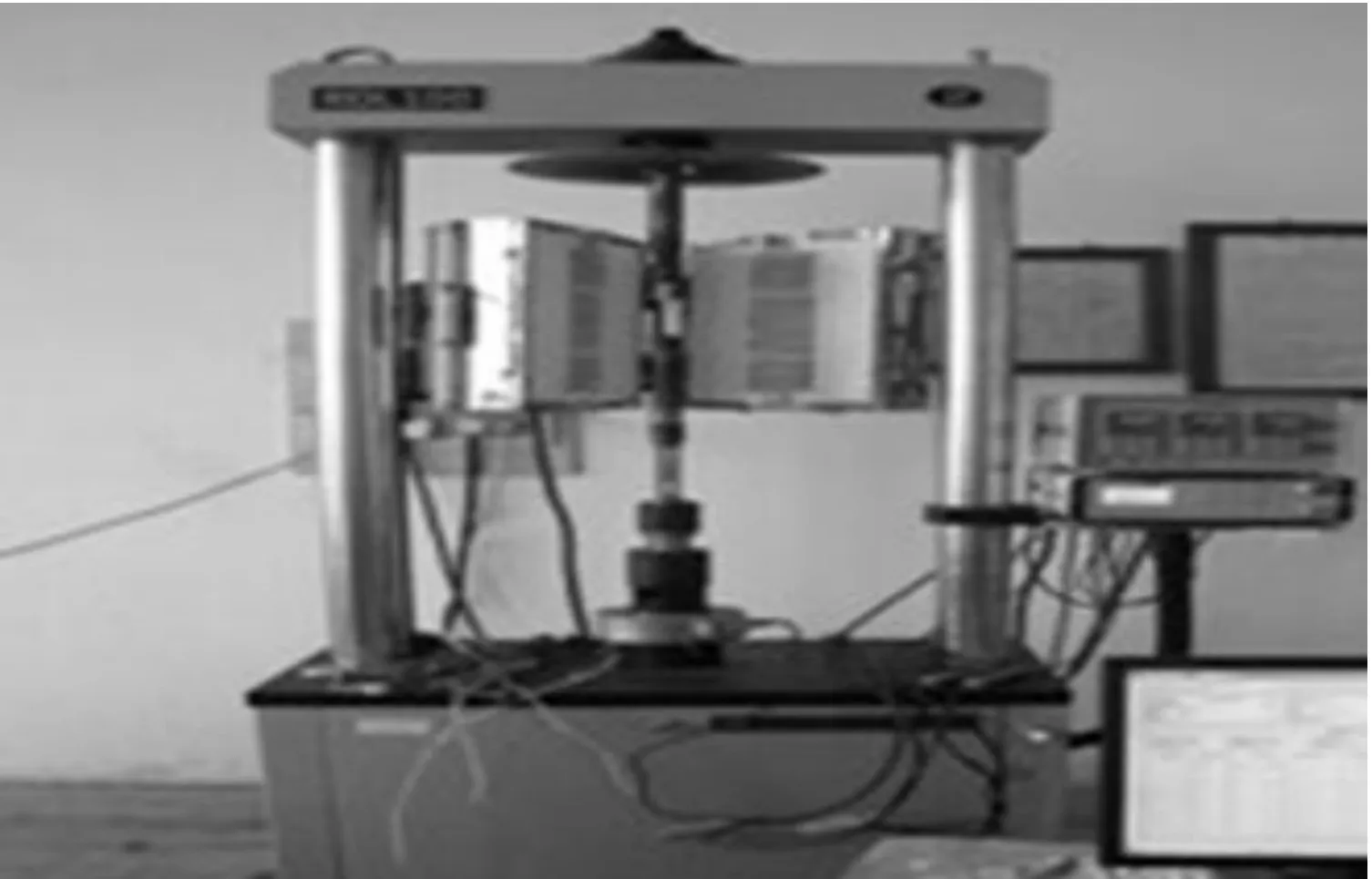
圖2 壓電作動器實驗臺架
本實驗中使用的實驗設備有實驗臺架、用來給壓電陶瓷作動器提供電壓的電源、力傳感器、位移傳感器、數據采集器以及分析系統。經過實驗分析可以得出壓電作動器力特性曲線,見圖3和圖4。
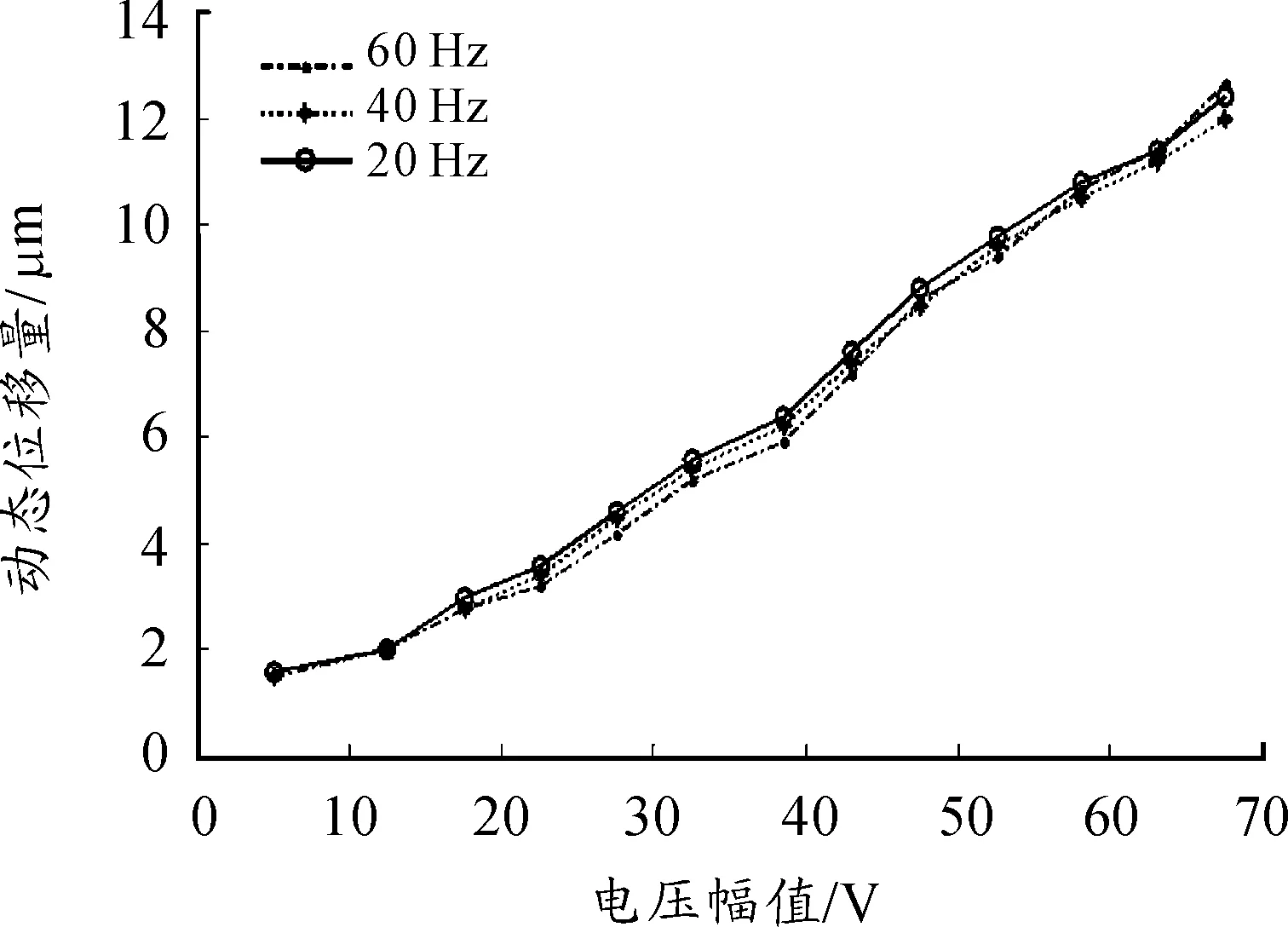
圖3 壓電陶瓷作動器動態輸出位移
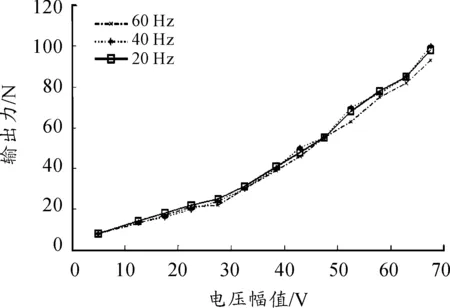
圖4 壓電陶瓷作動器動態輸出力
從以上壓電陶瓷作動器的實驗結果可以看出:在主動懸置控制中輸出力、動態位移量與電壓基本成線性關系。由于控制器輸出的控制電壓與作動器輸出的控制力成比例關系,本文可以直接將控制器輸出(控制電壓乘以比例系數)視為主動控制力。
1.3 整車主動懸置動力學模型
為改善汽車行駛的平順性,需要研究適合整車模型主動懸置的控制策略[8]。為此首先建立發動機整車主動懸置動力學模型。為了更全面地了解發動機垂直、側傾、俯仰和車身的垂直、側傾、俯仰之間的關系,使主動懸置控制更接近實際情況,建立整車十自由度模型,包括車輪4個自由度,車身垂直、側傾、俯仰,以及發動機垂直、側傾、俯仰10個自由度。

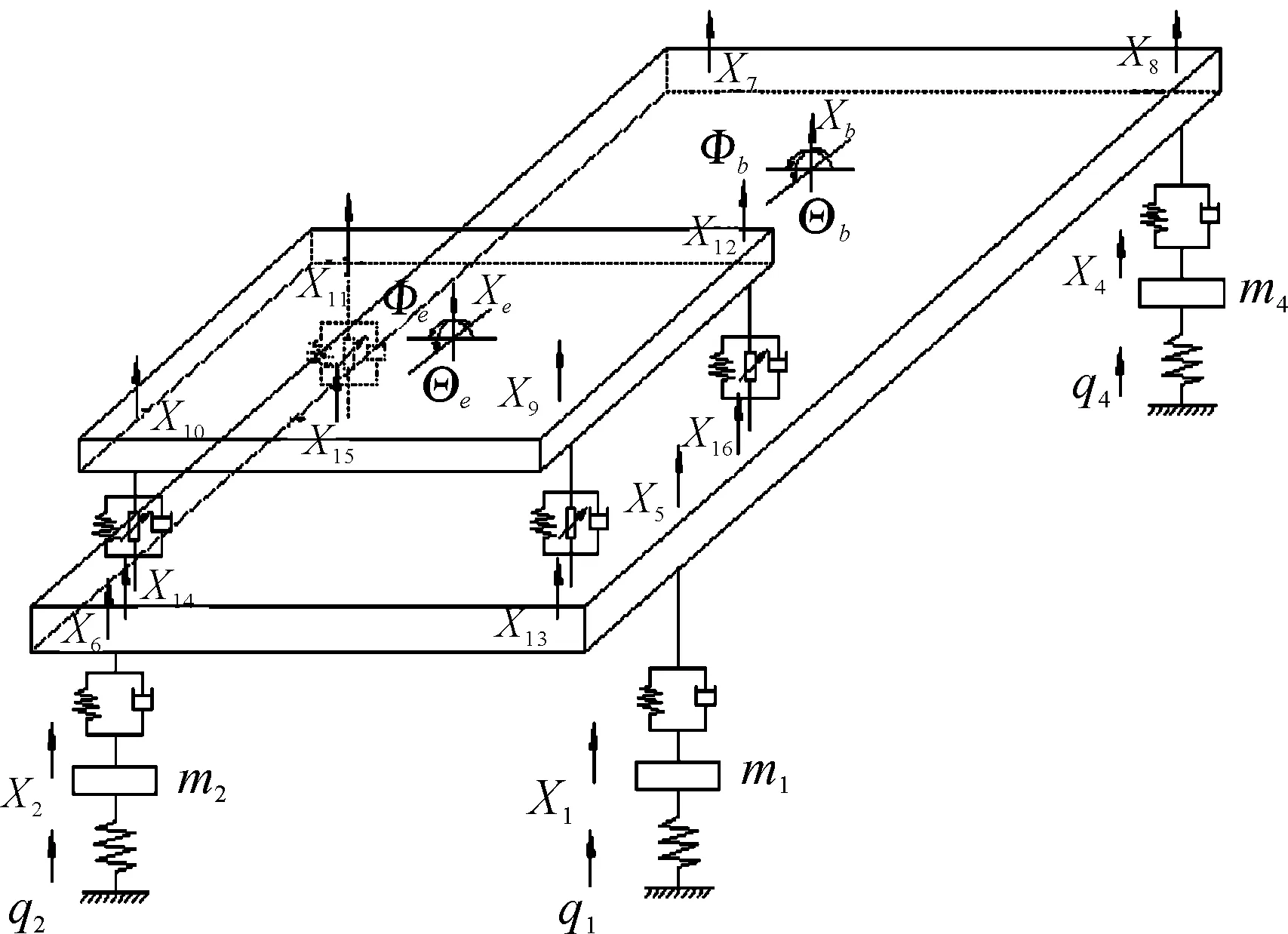
圖5 整車主動懸置動力學模型
根據牛頓運動學定律可得:



(Ffr+Ffl)c-(Frl+Frr)b+Fθy










(Ffr+Frr)q-(Ffl+Frl)p




(1)
假設發動機和車身都是小范圍微振動,所以滿足如下方程:
(2)
(3)
(4)
其中:x5、x6、x7、x8為左前、右前、左后、右后懸架垂直位移;x9、x10、x11、x12為左前、右前、左后、右后發動機上懸置垂直位移;x13、x14、x15、x16為左前、右前、左后、右后發動機下懸置垂直位移。
取狀態向量和輸出向量:

系統輸出向量:


Y=CX+DU
(5)
2 整車主動懸置經典模糊控制器設計
2.1 經典模糊控制器設計
模糊控制是近年來迅速發展的新型控制方法,與傳統邏輯相比,它能更加全面地分析不準確模型。模糊控制系統的工作原理是把被控對象的誤差e以及誤差變化率ec作為輸入量,確立系統所要的控制規則,通過模糊邏輯推理系統實時改變系統的參數來滿足系統的需求。以發動機前左懸置為例(其他3個主動懸置模糊控制器設計方法相似),其經典模糊控制器是把發動機加速度以及發動機加速度變化率當作控制器的輸入,輸出的變量為主動控制力。取偏差e和誤差變化率ec的論域為[-6 6],輸出變量F的模糊論域取[-7 7]。依據模糊控制器所具有的輸入變量與輸出變量的大小來劃分為7個模糊子集,分別是負大(NB)、負中(NM)、負小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB),模糊控制規則如表1所示。
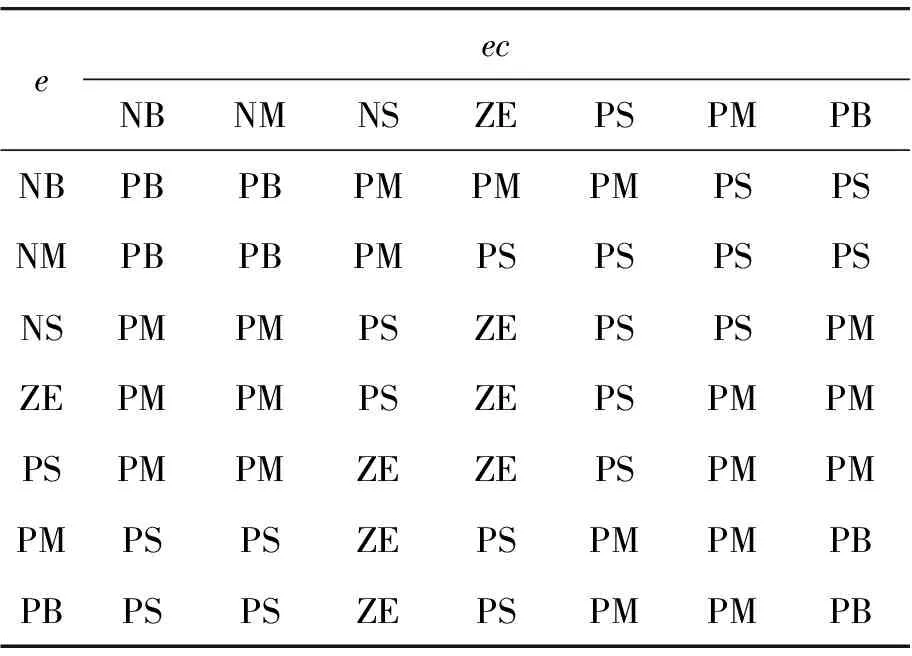
表1 模糊控制規則
2.2整車主動懸置經典模糊控制器結構
整車主動懸置經典模糊控制結構見圖6。
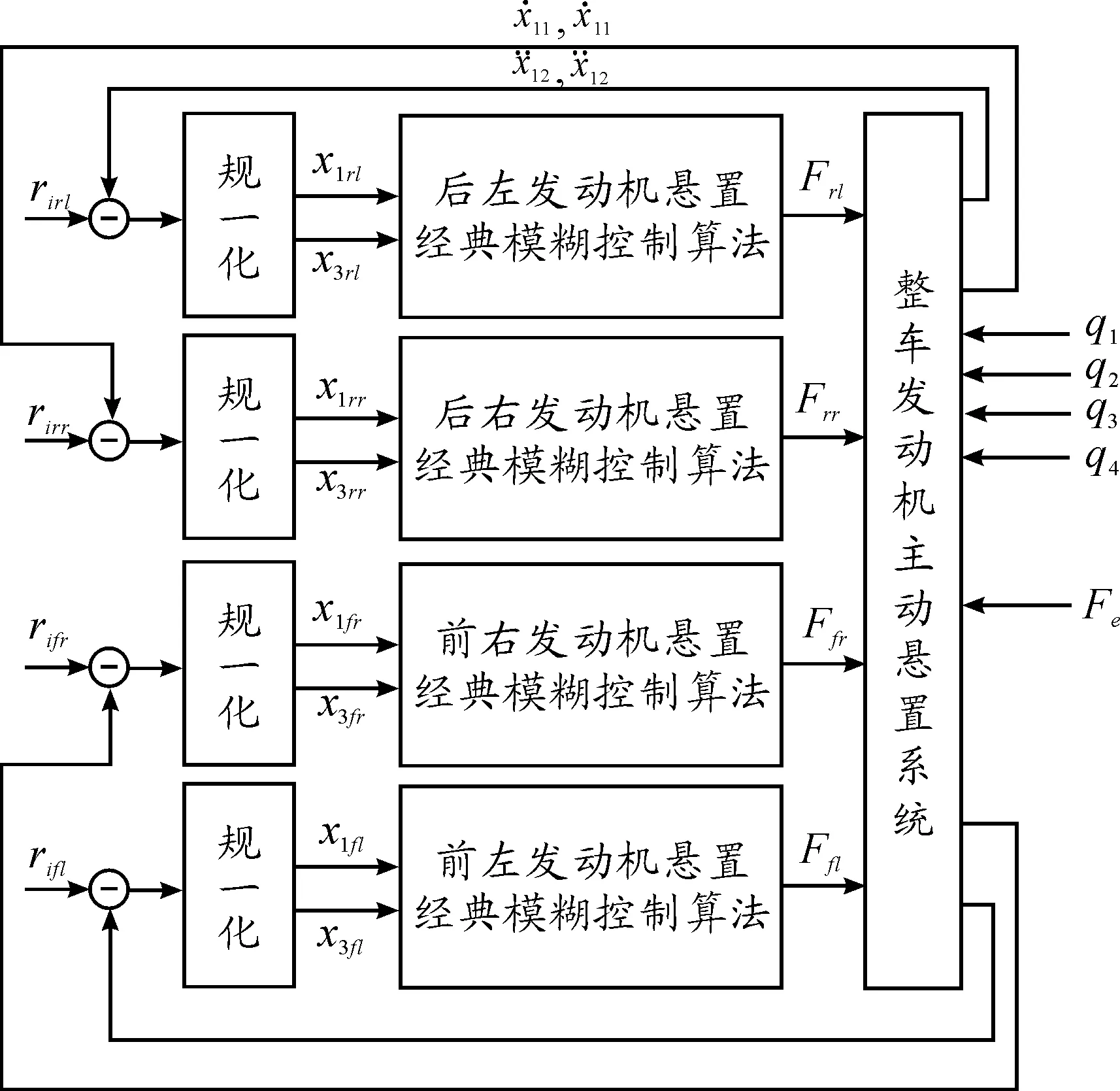
圖6 整車主動懸置經典模糊控制結構
3 整車主動懸置雙環模糊控制器設計
懸置作為底盤與發動機的連接件,一方面它要阻止發動機向車架傳遞振動力,另一方面也必須要阻止路面不平激勵對發動機振動與沖擊[9-10]。從汽車振動的本質來講,車輛的振動是由路面不平度引起的車身振動和發動機自身的振動組成的。因此,所設計的雙環控制器(內環和外環)的主要作用,一方面是消除路面激勵對車身的干擾,另一方面主要是穩定發動機姿態,降低發動機振動向車身的傳遞[9]。
3.1 主動懸置內環模糊控制器
內環控制是采用4個獨立的控制器分別控制每個壓電懸置產生主動控制力,從而抑制路面不平度對車身干擾。
對于經典的模糊控制方法,當變量輸入的個數增多時,模糊規則制定難度相應增大,且經典模糊控制模型的每個輸入對系統性能的影響是同等的,不能反映出各個輸入變量對系統性能影響的大小。而單一輸入規則群(SIRMs)模糊控制系統可以有效地解決上述問題。SIRMs模糊控制的原理是將多維模糊控制簡化為一維模糊控制,每個一維模糊控制可以視為單一變量的模糊邏輯系統[11]。

將SIRMs模糊控制算法應用到主動懸置系統中,可得到主動懸置控制力:
(6)

根據系統特點及控制經驗[13],當輸入變量很大或是較大時,懸置的主動控制力應起到阻礙其增長的作用,即懸置的主動控制力的方向應與輸入變量的方向相反,且取較大的阻力值;反之,則相反。各輸入變量對應的SIRMs模糊控制規則:
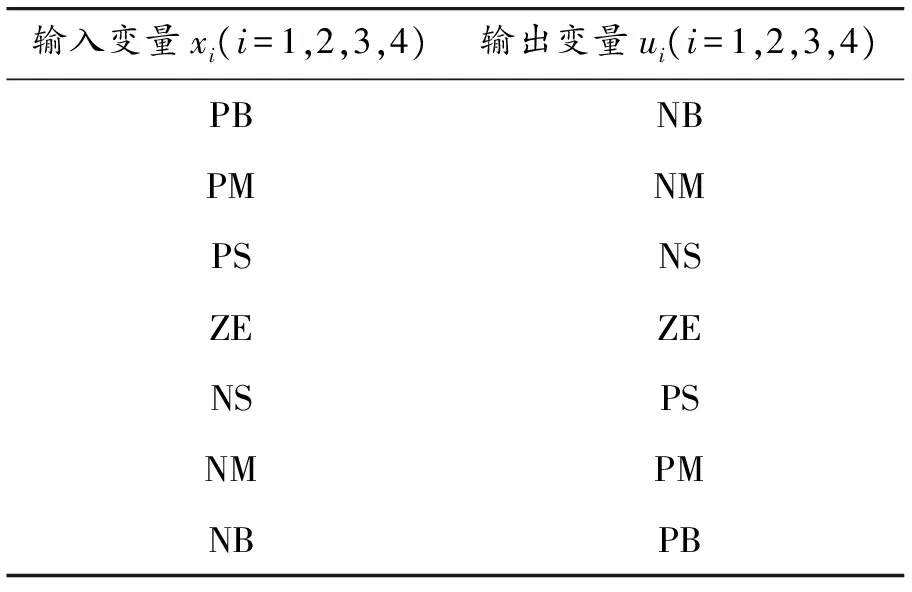
表2 各輸入變量對應的SIRMs模糊控制規則
同理,可設計其余3個懸置內環控制SIRMs模糊控制規則,由此4個懸置SIRMs模糊控制器就構成內環控制器。圖7為整車左前懸置內環模糊控制器結構,其他3點懸置SIRMs模糊控制器設計方法與左前懸置相似。

圖7 左前懸置基于SIRMs內環模糊控制器結構
3.2 外環控制器設計
外環控制器主要是穩定發動機的姿態,因此可以設計發動機的垂直、俯仰與側傾運動3個控制器。外環控制器基本結構如圖8所示。
3.3 邏輯控制器設計
內環控制器輸出的是4個懸置的主動控制力,外環控制控制器輸出發動機3個控制力,均只能通過壓電懸置產生,為了實現內外環的協調控制,需要將外環控制產生的發動機垂直、側傾、俯仰控制力有效地分配到4個懸置中[13]。
由于發動機的振動是垂直、側傾、俯仰振動的合成,因此發動機半主動控制應該包含3種模式,如圖9所示。
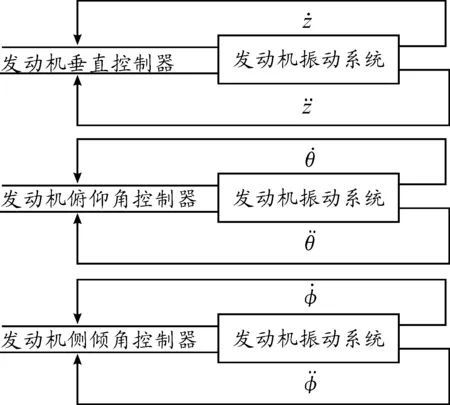
圖8 外環控制器結構
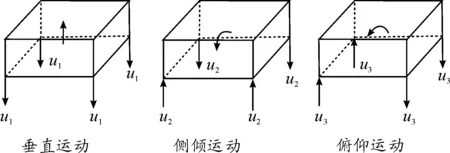
圖9 發動機垂直,側傾,俯仰振動示意圖
根據力的合成,可以得到4個懸置的控制力:
ffr=-u1+u2+u3,ffl=-u1+u2-u3
frl=-u1-u2-u3,frr=-u1-u2+u3
因此,外環控制器跟邏輯控制器連接如圖10所示。
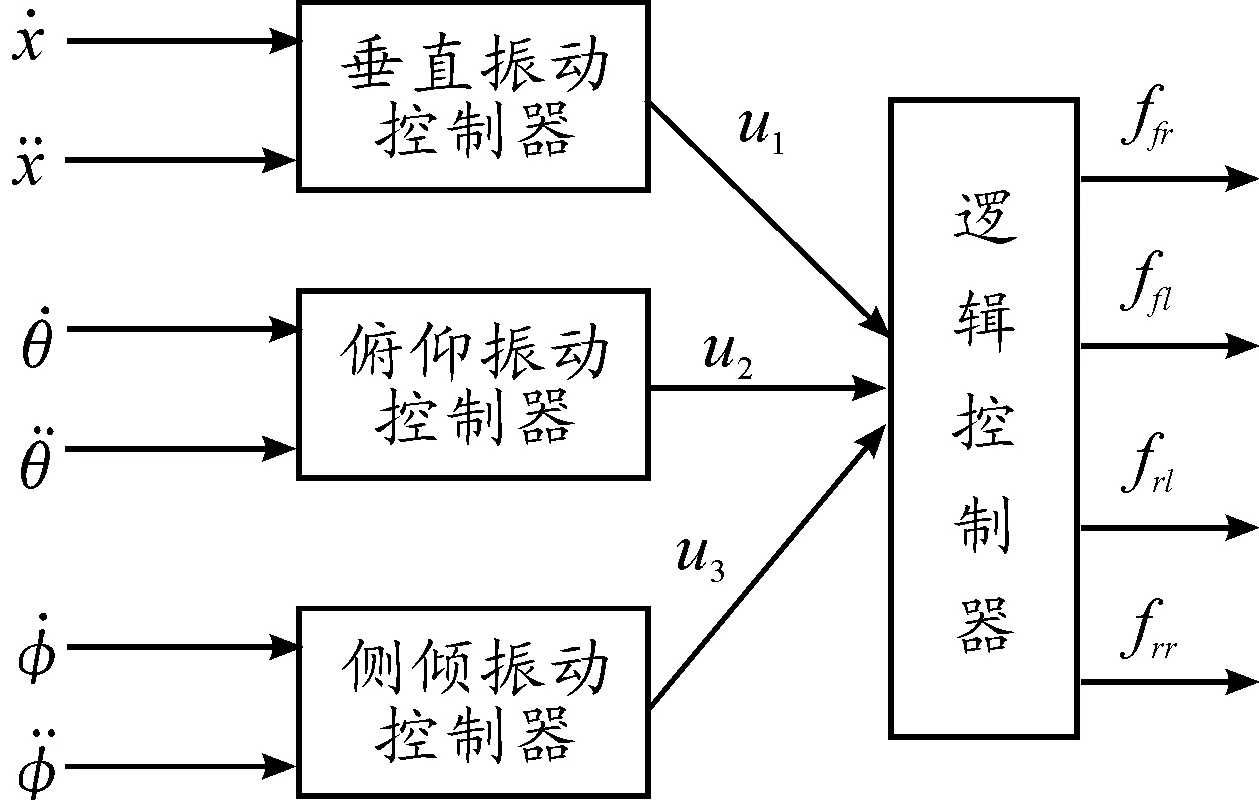
圖10 外環模糊邏輯控制系統框圖
將內環控制力與外環控制力相疊加,得到了整車雙環控制力。基于整車發動機主動懸置雙環控制結構如圖11所示。
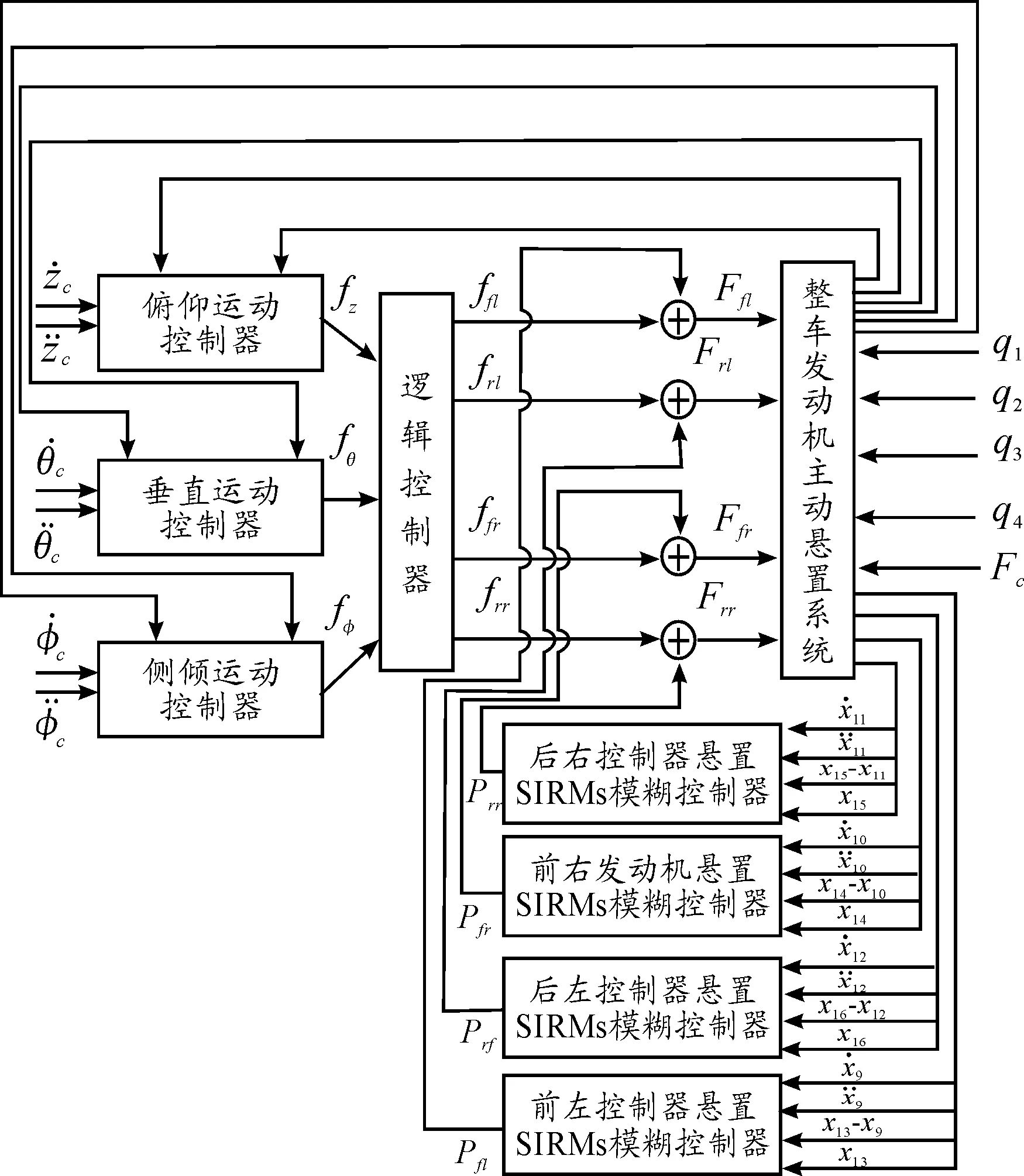
圖11 整車發動機主動懸置雙環控制
4 系統仿真
為了驗證所設計的雙環控制器的有效性,現對20 km/h車速的車輛進行仿真。在設計雙環模糊控制算法時,須考慮如何使兩種控制算法具有更高的可比性。由于經典模糊控制算法中各個模糊推理方法為簡略模糊推理方法,因此設計的雙環模糊控制算法也采用簡略模糊推理方法,其參考輸入、歸一化因子以及模糊隸屬度函數設計與 SIRMs 模糊控制算法一致。整車參數選用如表3所示。
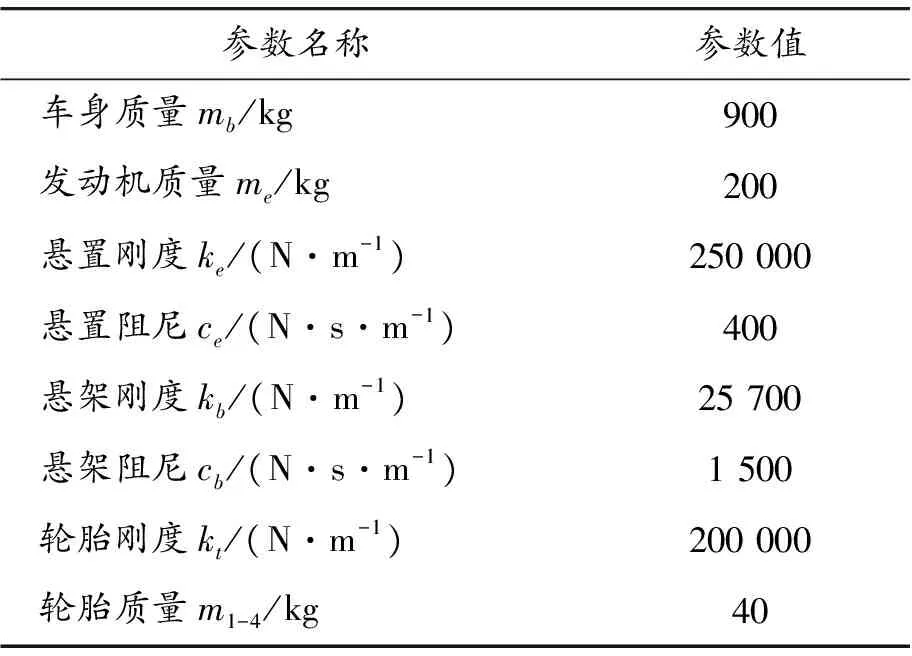
表3 車輛相關參數
仿真結果如圖12~16所示。
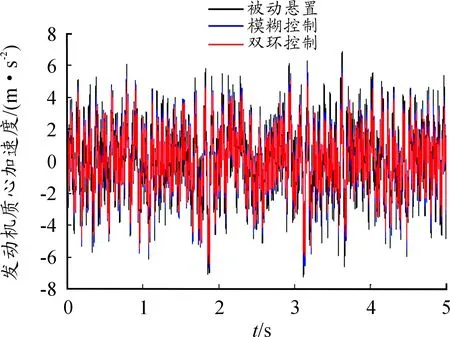
圖12 發動機質心加速度響應
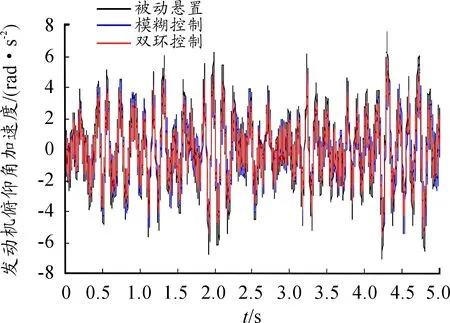
圖13 發動機俯仰角加速度響應
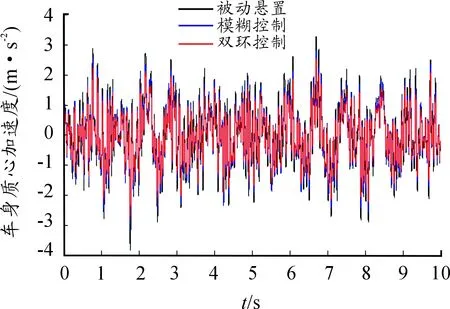
圖14 車身質心加速度響應
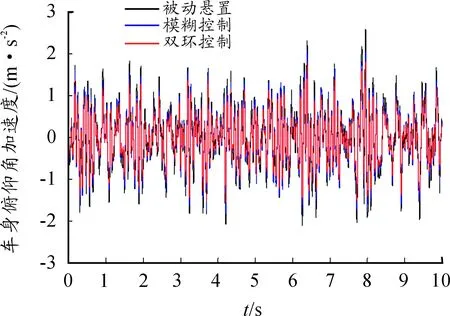
圖15 車身俯仰角加速度響應
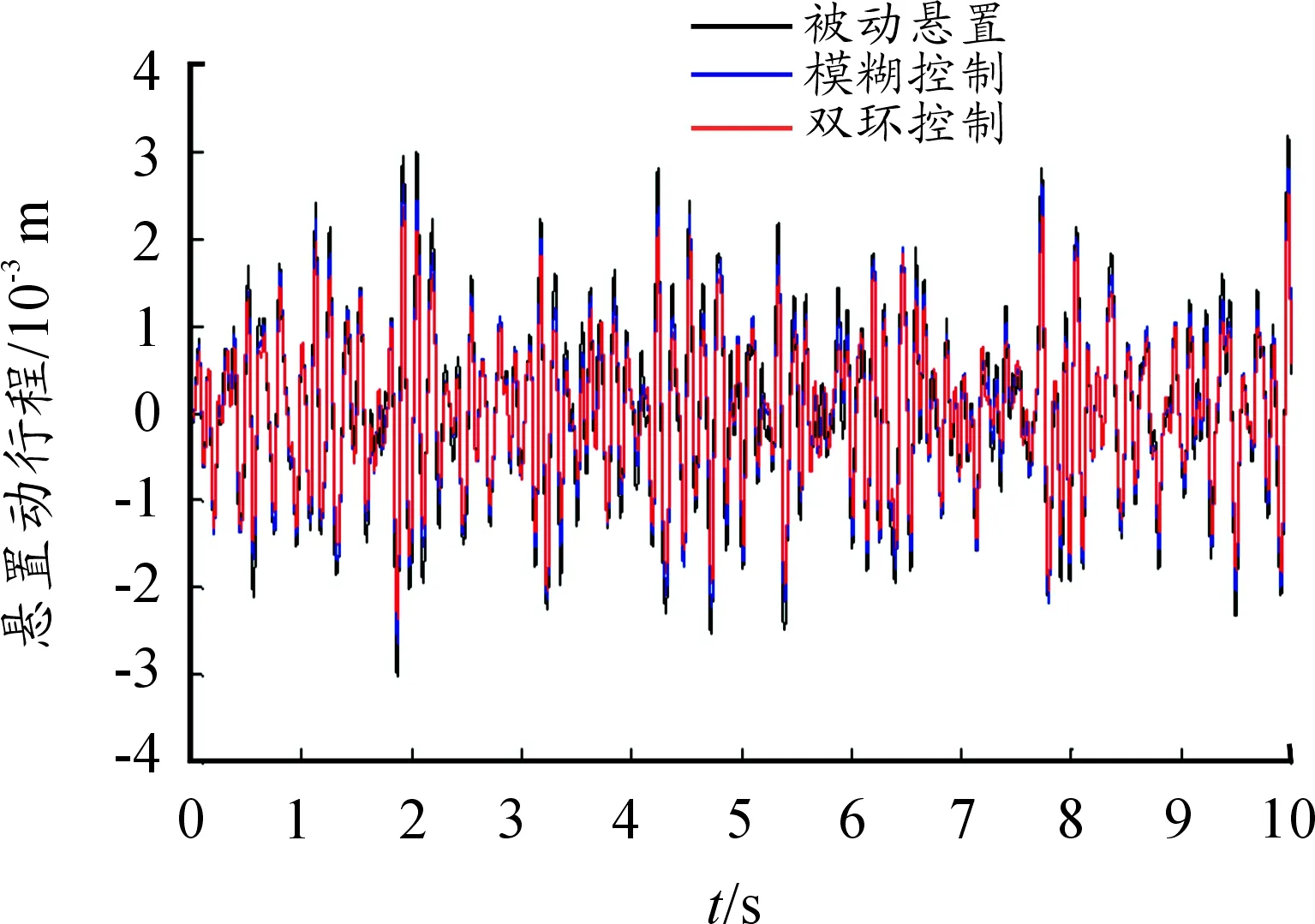
圖16 懸置動行程響應
從表4可以看出:相比于被動懸置和模糊控制,整車雙環控制在發動機、車身振動加速度方面有顯著改善,可以提高汽車行駛的平順性[14-15]。
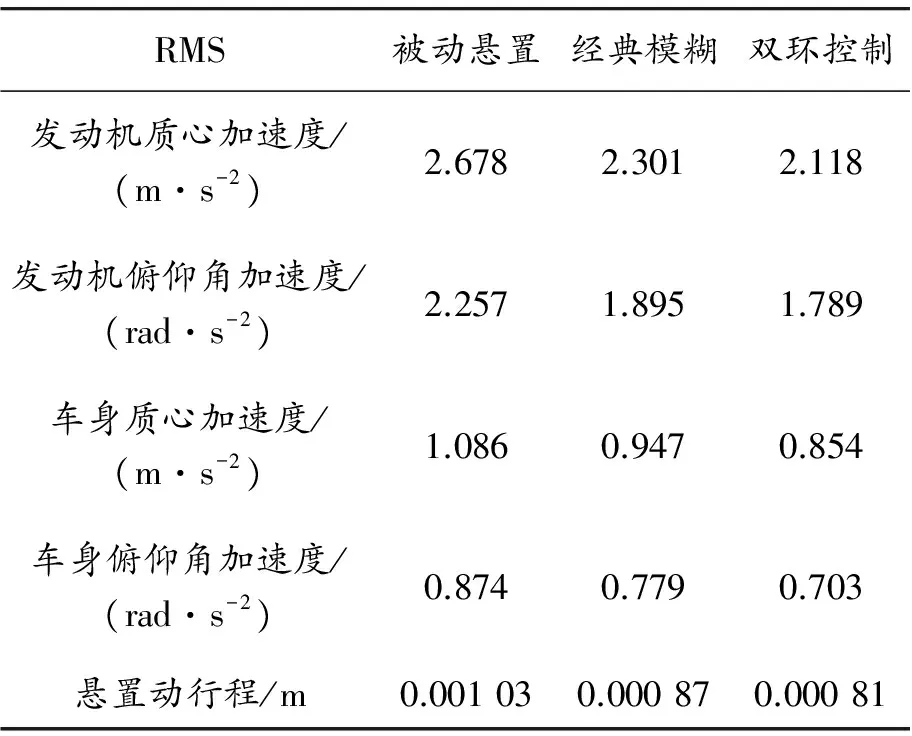
表4 仿真結果比較
5 結束語
為了改善汽車行駛的平順性,設計了一種包含壓電陶瓷作動器的主動懸置系統,并提出和研究與之匹配的整車雙環控制策略。隨機路面仿真結果表明:壓電主動懸置能顯著抑制發動機和車身振動,提高汽車行駛平順性和舒適性,也為以后的主動懸置實車實驗提供理論基礎。
[1] 樊攀,包漢偉.汽車動力總成懸置系統隔振特性仿真優化[D].森林工程,2017.31( 3):131-135.
[2] 董加加,雷剛,賴立,等.汽車動力總成懸置設計優化軟件開發[J].重慶理工大學學報(自然科學),2015,29(8):18-22.
[3] 謝柯,曾發林,李建康,等.商用車駕駛室懸置系統優化[J].重慶理工大學學報(自然科學),2015(3):15-20.
[4] 丁世穩.發動機主動懸置控制方法的研究[D].長春:吉林大學,2009.
[5] 陶帥,白鴻柏,何建設,等.壓電作動器位移輸出特性分析[J].壓電與聲光,2010,32(5):807-810.
[6] 李志強.V型雙振子螺桿式直線壓電作動器研究[D].太原科技大學,2015.
[7] 邱煒.基于壓電作動器的空間單軸主動隔振研究[D].杭州:浙江大學,2016.
[8] 張超.車輛動力總成懸置系統匹配優化仿真研究[D].重慶:重慶交通大學,2011.
[9] 陳克,李曉政,周霜霜.動力總成懸置系統優化與減振分析[J].沈陽工業大學學報,2016,38(1):57-62.
[10] 杜憲.某越野車動力總成懸置系統設計及優化研究[D].北京:北京理工大學,2015.
[11] 楊蔚華,李友榮.新型輪邊驅動電動車平順性仿真分析[J].計算機仿真,2015,42(2):146-151.
[12] OHAD A R I,MAGHSOODI G.Simulation of Engine Vibration on Nonlinear Hydraulic Engine Mounts[J].Journal of Vibration and Acoustics,2007,129(8):417-424.
[13] HASSISON H C.Engine Installation[J].AutomobileEngineering,2009,10:46-50.
[14] 張自偉,鄭玲.基于磁流變懸置的整車建模振動控制的研究[J].汽車工程,2014,36(3):193-197.
[15] 王峰.汽車動力總成懸置系統振動分析及優化設計[D].上海:上海交通大學,2008.
(責任編輯劉 舸)
ResearchonActiveMountVibrationControlStrategyofVehicleEngine
PAN Gongyu, JING Shuanglong, XIAO Yunqiang
(School of Vehicle Engineering, Jiangsu University, Zhenjiang 212013, China)
In order to solve the vehicle vibration caused by engine vibration and road surface excitation, a double ring control with active suspension of piezoelectric ceramics is proposed.vThe outer ring controller is mainly used to control the engine of vertical, pitch and roll motion to made the engine’s posture stable;And the inner control is controlled by four independent controller respectively each piezoelectric active control suspension, which can inhibit the road surface roughness on the body. And the inner and outer ring are effectively connected by logic controller. The simulation results show that the double ring control can reduce the vibration of the engine and improve the ride comfort of the vehicle compared with the traditional fuzzy control and passive mount.
piezoelectric ceramic actuator;active mount;double ring control;SIRMs fuzzy control
2017-07-02
國家自然科學基金資助項目(51375212),江蘇省六大高峰人才資助項目(2103ZBZZ024)
潘公宇(1965—),男,江蘇鎮江人,教授,主要從事汽車底盤振動方面的研究;通訊作者 景雙龍(1992—),男,河南開封人,碩士,主要從事發動機主動懸置控制研究,E-mail:122147235@qq.com。
潘公宇,景雙龍,肖云強.汽車發動機主動懸置振動控制策略研究[J].重慶理工大學學報(自然科學),2017(11):1-8.
formatPAN Gongyu, JING Shuanglong, XIAO Yunqiang.Research on Active Mount Vibration Control Strategy of Vehicle Engine[J].Journal of Chongqing University of Technology(Natural Science),2017(11):1-8.
10.3969/j.issn.1674-8425(z).2017.11.001
U463
A
1674-8425(2017)11-0001-08
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44
汽車與新動力(2014年2期)2014-02-27 12:10:15