履帶式電動拖拉機驅動系統控制策略的研究
2017-12-06 02:37:21商高高張建舟張家俊
重慶理工大學學報(自然科學) 2017年11期
關鍵詞:控制策略
商高高,張建舟,張家俊
(江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013)
履帶式電動拖拉機驅動系統控制策略的研究
商高高,張建舟,張家俊
(江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013)
為提高履帶式電動拖拉機工作效率,設計了一套整機驅動系統控制策略。其中,在正常工作模式下設計建立了模糊自調整PID控制策略,在失效模式下設計了跛行行車的控制策略。運用Matlab/Simulink對整機驅動系統各個模式的控制策略進行仿真研究。仿真結果表明:在運輸模式下,拖拉機能夠實現目標速度的跟蹤,在犁耕工作模式下,拖拉機的速度脈動在可接受的范圍內,且轉矩補償能夠實現驅動阻力變化的跟蹤;在跛行行車控制策略下,進入跛行行車模式之后,整機以固定速度運行,并且SOC下降速度明顯變緩。
電動拖拉機;驅動系統;控制策略
與電動汽車的快速發展相比,電動拖拉機的發展相對緩慢,尤其是對其驅動系統控制策略的研究基本處于起步階段。驅動系統是整個履帶式電動拖拉機動力系統的核心,其控制策略的好壞直接影響整機的動力性以及經濟性。因此,對電動拖拉機驅動系統控制策略的研究具有重要意義[1-3]。
本文運用Matlab/Simulink對整機驅動系統各個模式的控制策略進行仿真研究。在已有的傳動系統布置、以及選用的無刷直流電機和電機的直接轉矩控制的基礎上,根據建立的履帶式電動拖拉機運輸作業模式力學模型以及犁耕作業模式時的力學模型,建立履帶式電動拖拉機驅動系統具體的控制仿真模型,并為此模型建立合適有效的控制策略。
1 驅動模式分析
履帶式電動拖拉機在田間作業時,根據電動拖拉機的擋位、加速踏板和制動踏板的位置信號、電池的SOC狀態、提升裝置信號以及其他傳感器信號,將電動拖拉機分為3種驅動模式[4-5]:起車模式、正常驅動模式和失效模式。3種驅動模式的具體內容如下:
1) 起車模式:是指電動拖拉機已經接通電源,而司機還沒有踩下油門踏板,電機提供一個較小轉矩,此轉矩的主要作用是使電動拖拉機以一個恒定的較小的速度運行。
2) 正常驅動模式:包含運輸作業模式和犁耕作業模式。整車的控制策略會根據加速踏板的位置、拖拉機的行駛速度、提升裝置的位置以及其他傳感器的信號來控制電機轉矩驅動拖拉機以一定的車速行駛。
3) 失效模式:是指拖拉機的驅動系統出現嚴重故障或者蓄電池的SOC值低于某個設定的閾值時,對動力電池的放電電流以及電機的輸出轉矩進行限制,防止放電電流過大引起危險,并使拖拉機能夠跛行至維修點維修或者充電。
2 控制策略設計
2.1 正常驅動模式
電動拖拉機在正常驅動模式作業時,大棚內田間路面狀況復雜,拖拉機工作阻力不可預知,傳統的PID控制在驅動系統中很難得到理想的結果。因此,本文選取模糊自調整PID作為電動拖拉機驅動系統在正常驅動模式下的控制策略,以提高電機的運行效率。
2.1.1 模糊自調整PID控制系統模型
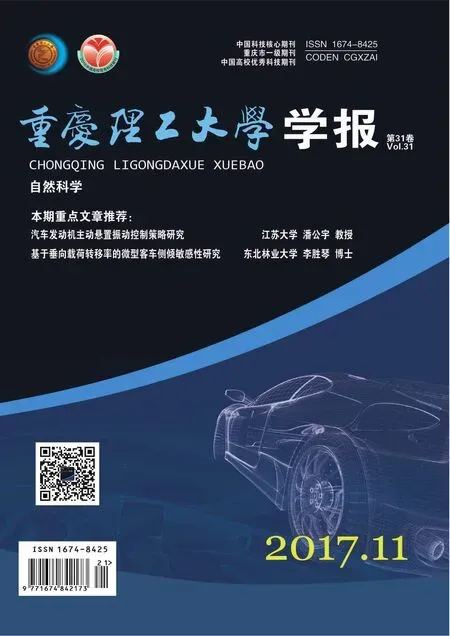
模糊自調整PID控制是利用專家的實際操作經驗作為操作規則存儲到微機當中,在控制過程中,PID的3個參數KP、Ti、Td會根據實際輸入量進行調整,這種控制方法集合了模糊控制和PID控制的優點[4-9]。其中:KP為比例調節系數;Ti為積分調節系數;Td為微分調節系數。圖1所示為模糊自調整PID控制結構原理。

圖1 模糊自調整PID控制原理
本文基于Matlab/Simulink建立的模糊自調整PID控制系統,仿真模型如圖2所示。該模型由一個兩輸入三輸出模糊控制器和一個PID控制器組成。模糊控制器中的輸入量為e和Δe,輸出量為ΔKP、ΔTi、ΔTd。其中:e為實際速度和與目標速度的差值;Δe為速度差值變化;ΔKP為比例調節系數增量;ΔTi為積分調節系數增量;ΔTd為微分調節系數增量。如圖3所示的PID控制器為模糊自調整PID控制系統的子模型。
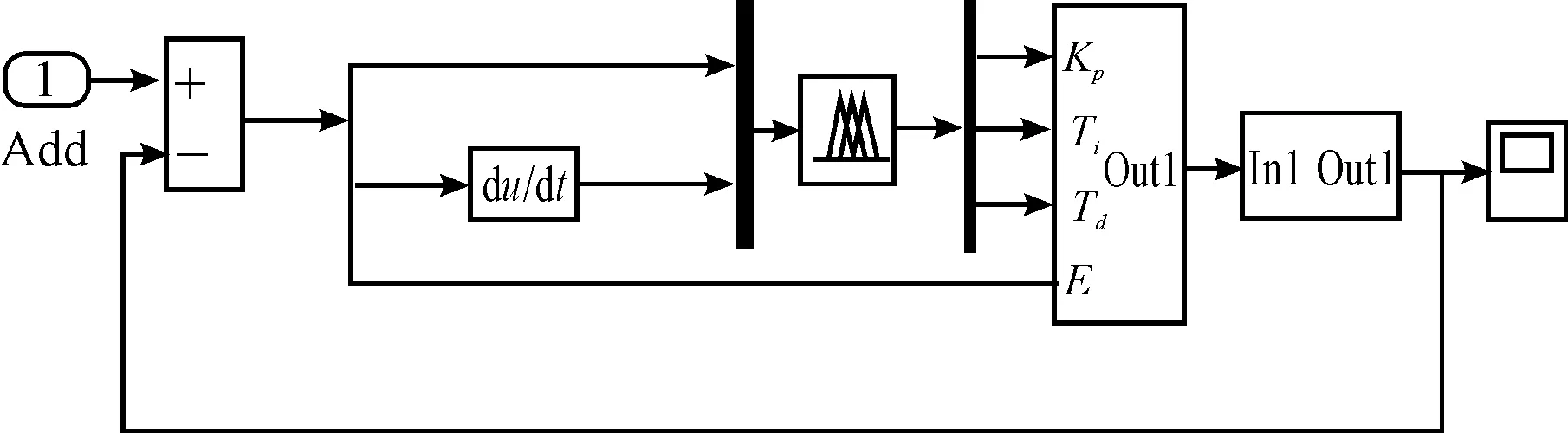
圖2 模糊自調整PID控制系統仿真模型
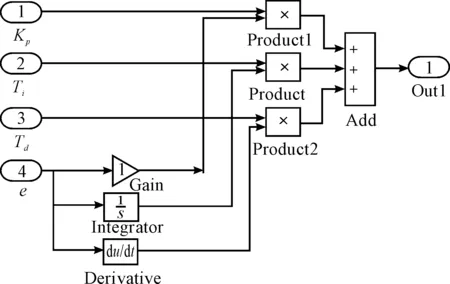
圖3 PID控制器仿真子模型
2.1.2 控制規則
該控制系統中的模糊控制器輸入和輸出變量被分為7個等級,論域分別為[-3,3]。各個語言變量模糊子集的中心和寬度按表1確定。

表1 模糊子集中心和寬度值
輸入量和輸出量的隸屬函數均取高斯函數,得到的隸屬度函數的圖形如圖4所示。

圖4 語言變量的隸屬度函數圖形
根據關于車速偏差e及其變化率Δe與PID 3個參數ΔKP、ΔTi、ΔTd關系的專家經驗得出這3個PID控制參數的規則。表2為ΔKP模糊控制規則,表3為ΔTi模糊控制規則表,表4為模糊控制規則。利用模糊控制器,根據輸入參數e和Δe進行模糊推理,查詢模糊矩陣表進行PID控制參數調整[6-11]。

表2 ΔKP模糊控制規則
表3 ΔTi模糊控制規則
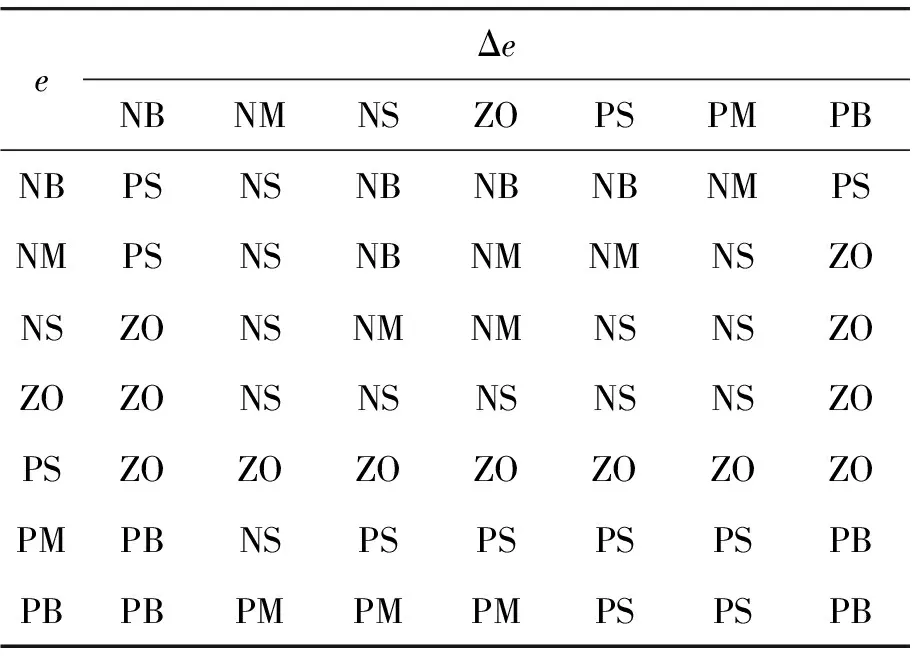
表4 ΔTd模糊控制規則
為識別模糊推理后輸出的模糊集合,本文中采用質心法進行去模糊化。
經模糊控制器得出修正參數,分別將ΔKP、ΔTi、ΔTd代入式(1),得出修正參數KP、Ti、Td。
KP=KP+ΔKP
Ti=Ti+ΔTi
Td=Td+ΔTd
(1)
2.2 失效模式
圖5為電動拖拉機跛行行車系統結構,驅動系統出現故障或者電池SOC值低于設定值時,電動拖拉機進入失效模式,執行跛行行車控制策略。當出現非嚴重故障時,執行失效跛行控制;當出現SOC值低于標定值時,執行能量不足跛行控制。在失效模式中,拖拉機工作在限制電池放電電流和電機輸出功率及扭矩的模式下,保證能夠運行至附近的維修點或者充電站。

圖5 跛行行車系統結構
2.2.1 失效跛行行車控制
與電動拖拉機的跛行控制策略相比較,傳統燃油拖拉機的跛行行車控制策略較成熟,所以本研究參考傳統燃油拖拉機的跛行行車策略[12-13]。當車輛出現非嚴重故障時,開始啟動跛行失效跛行行車控制策略。本研究將非嚴重故障情況分為以下3種:
1) 當電機出現非嚴重故障時,采用限制最大的運行功率的處理方式;
2) 當拖拉機驅動系統除電機外的其他部分出現故障時,采用按比例降低運行功率的處理方式;
3) 當加速踏板位置傳感器出現故障而導致整車控制器無法得到正確的信號或者電池SOC值低于設定閾值時,采用以固定功率運的處理方式。
2.2.2 能量不足跛行行車控制
圖6所示為動力電池端電壓與SOC的關系,當動力電池電量不足即電池SOC變低時,電池輸出電壓變小,根據輸出功率近似計算公式P=UI,為保證輸出功率不變,需提高放電電流。但是動力電池的放電電流超過限度會使電池嚴重發熱,從而影響電池、整機以及駕駛人員的安全[14]。因此,隨電池SOC下降,動力電池輸出的最大功率應隨之下降。圖7所示為本研究得到的動力電池SOC與輸出的最大功率關系。

圖6 電池端電壓與SOC之間的關系

圖7 電池提供最大功率與SOC之間的關系
當電池的電量不足時,采用對電壓進行分狀況控制和限制動力電池放電電流的控制策略。在分階段控制電壓的控制策略中,當電機電壓小于警告電壓并此過程持續超過 3 min時,提醒警告駕駛員使電動拖拉機脫離犁耕等功率消耗大的作業并及時充電,電機電壓小于限制電壓并持續超過1 min時,進入跛行行車模式。在電流限制控制策略中,當電池的SOC值低于設定的0.2時,提醒駕駛員使電動拖拉機脫離犁耕等功率消耗大的作業并及時充電,整車控制器進入跛行行車模式。為了防止過電現象的出現,采用分階段控制電壓與電流限制的方法。根據圖6所示,電池的端電壓與電池的SOC值之間近似地成線性關系,為了簡化控制,在兩種情況之下本文都采用電流限制控制。
3 仿真及仿真結果分析
3.1 整車控制仿真建模
為驗證驅動系統的控制策略,建立了整車控制仿真模型,主要包括駕駛員模型、整車控制模型、電機及其控制模型、電池模型以及驅動系統模型。其中:驅動電機及其控制模型是基于直接轉矩控制開發的,電池模型根據廠家提供的參數建立[15-16]。
3.2 測試工況的建立
與電動汽車不同,履帶式電動拖拉機除了要完成運輸作業及田間轉移外,還要完成一系列的田間作業任務,比如耕、耙、旋耕、收貨、播種等。因此,本文建立了2種履帶式電動拖拉機典型的工況:① 運輸作業工況;② 犁耕作業工況。如圖8所示,參照低速EUDC測試工況作為履帶式電動拖拉機的運輸作業工況,此工況的運行時間為200 s,最大車速為7 km/h,平均車速為4.8 km/h,此過程中拖拉機行進的距離為266 m。圖9為犁耕測試工況,因為履帶式電動拖拉機在進行犁耕作業時,田間路面狀況復雜,所受到的牽引阻力會持續變化。因此,本文在建立犁耕測試工況時,以額定牽引力為基準,使牽引阻力在其上下變化,車速保持不變,如圖中虛線所示。
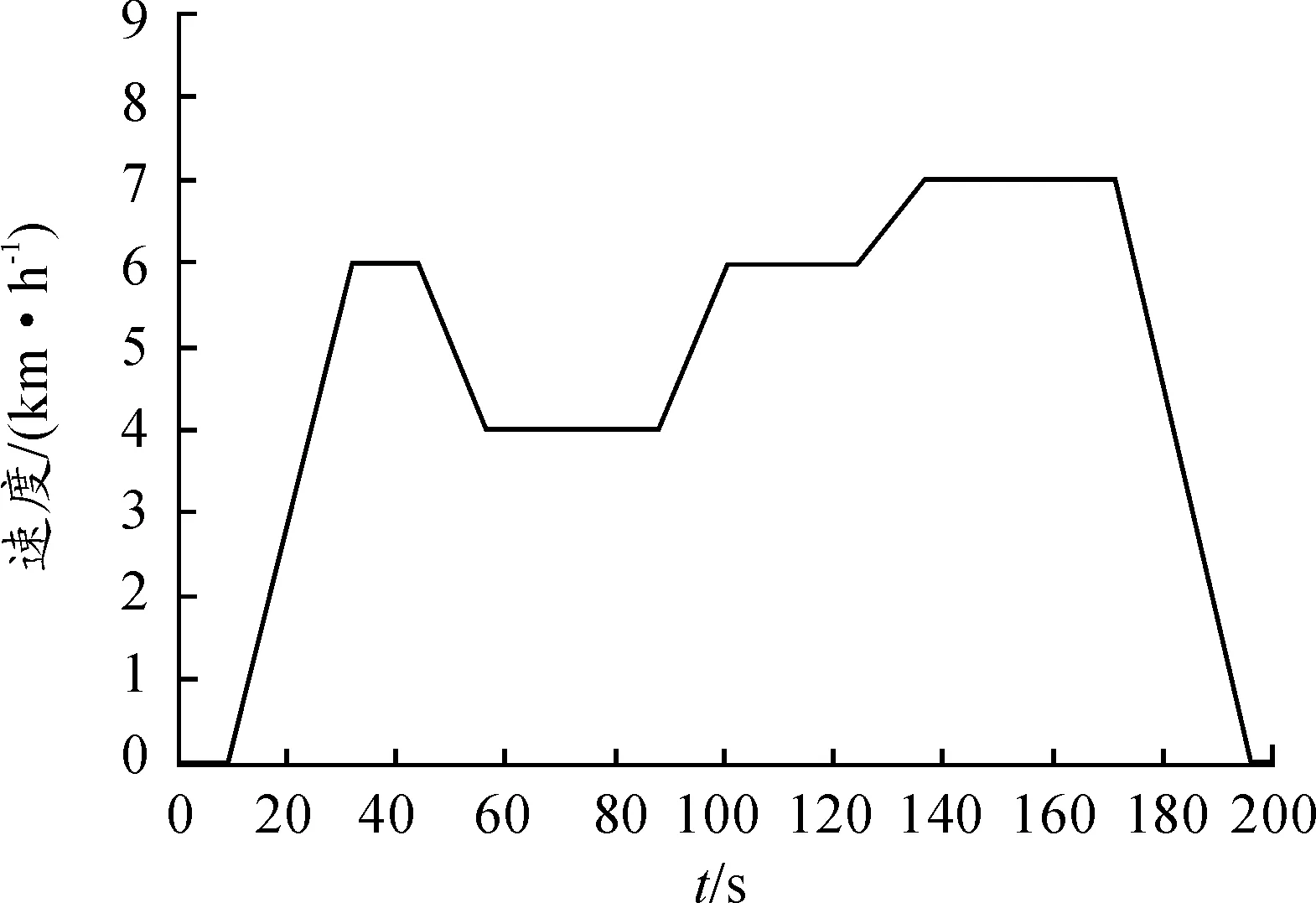
圖8 運輸作業工況

圖9 田間犁耕作業測試工況
3.3 履帶式電動拖拉機的主要參數
履帶式電動拖拉機整車及其傳動系統的主要參數如表5所示。
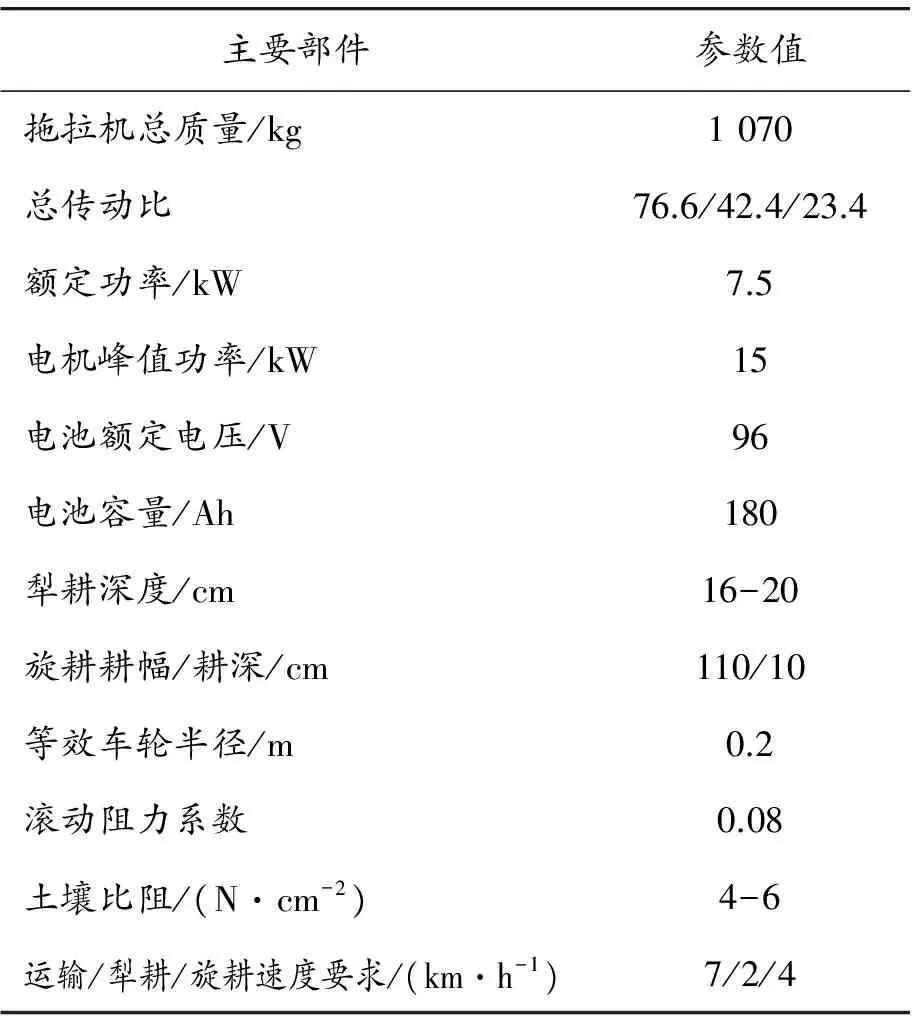
表5 主要部件參數
3.4 運輸作業時的仿真結果及分析
以圖9所示的運輸測試工況作為履帶式電動拖拉機仿真系統的輸入工況進行仿真,得到的仿真結果如圖10所示。

圖10 運輸工況仿真結果
由速度曲線可以看出:速度偏差很小,仿真速度能很好地跟隨目標工況速度的變化,控制摸塊工作正常。由修正轉矩圖可以看出:在加速或減速過程中修正轉矩較大,而當車速穩定時,修正轉矩基本為0,說明在加速或減速階段要克服加速阻力,而勻速階段阻力不變。
3.5 犁耕工況仿真結果及分析
以圖10所示的犁耕測試工況作為履帶式電動拖拉機仿真系統的輸入工況進行仿真,得到的仿真結果如圖11所示。
從速度曲線上可以看出:仿真速度能夠很好地跟蹤目標速度,說明在犁耕工況時模塊工作正常。由修正轉矩圖可以看出:圖中曲線的變化趨勢與工況牽引阻力的變化趨勢保持一致。
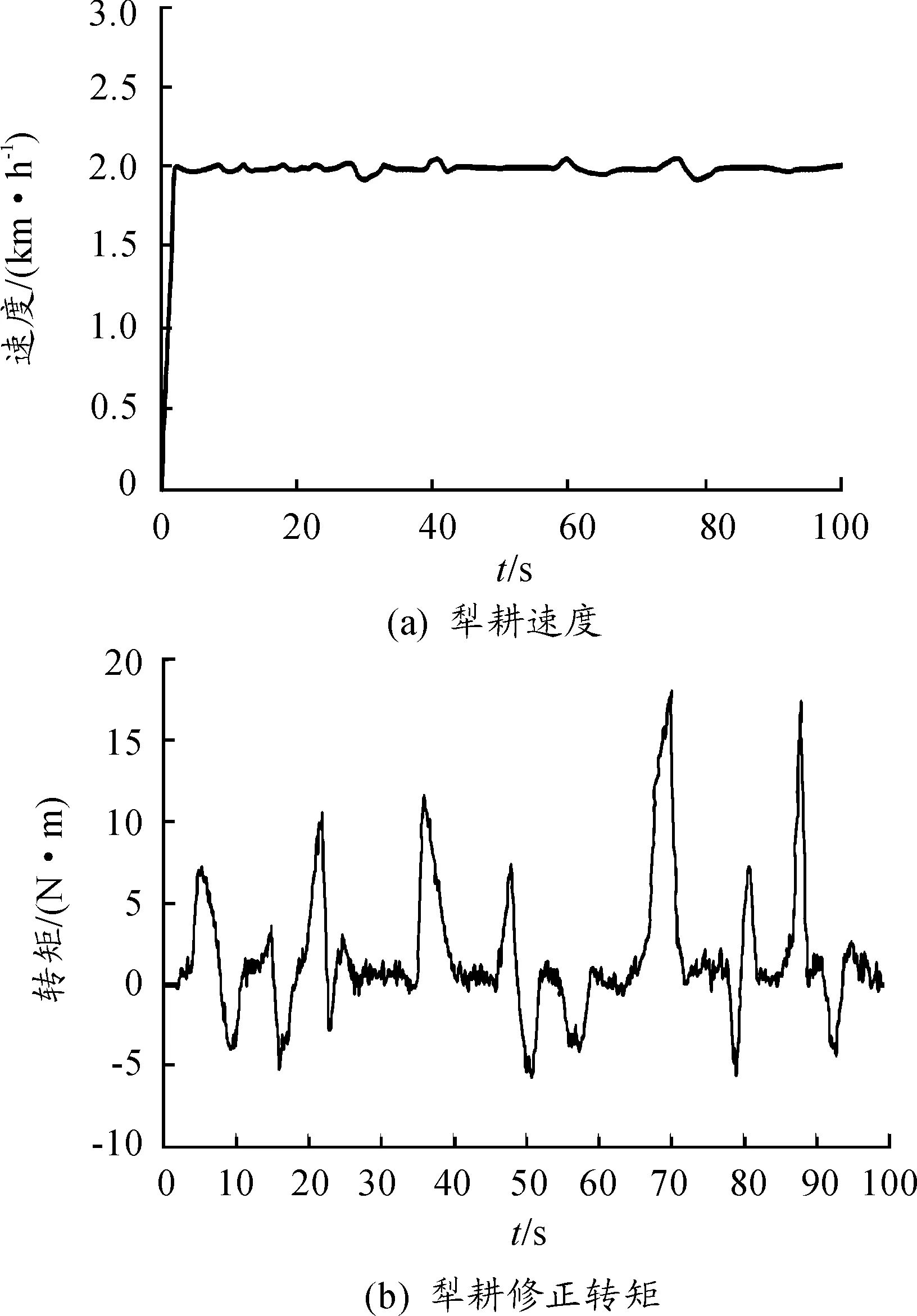
圖11 犁耕工況仿真結果
3.6 失效模式下跛行行車控制策略仿真
在履帶式電動拖拉機發生非嚴重故障或者電池SOC值低于設定值時,拖拉機會進入跛行回家控制策略,因為非嚴重故障情況復雜,難以模擬仿真,因此本文只對當電池SOC值低于設定值時進行跛行行車控制策略的仿真。設定進入到跛行行車控制策略的電池SOC的下限值為0.2,仿真結果如圖12所示。
由速度曲線可以看出:當車輛進入跛行行車模式,車輛將以一個較低的速度勻速運行,以保證車輛能夠跛行回家。由SOC曲線可以看出:當SOC低于0.2時,車輛進入跛行行車模式,此時限制了車輛的轉矩輸出,使電池的SOC值下降較正常行車模式變得緩慢。根據轉矩曲線,當進入跛行行車模式時,電機的輸出轉矩為某一設定的固定值。綜上所述,所建立的跛行行車控制策略在電池電量受到限制時是可行、有效的。

圖12 跛行行車仿真結果
4 結束語
在拖拉機力學模型的基礎上,根據電動拖拉機的實際工作狀況,建立了正常工作模式下的模糊自調整PID控制策略和失效模式下的跛行控制策略。通過仿真結果分析,在正常工作模式下,車速能夠很好地跟蹤目標車速,特別是在犁耕工況時路面行駛阻力變化大,仍能得到較為理想的控制結果。在跛行行車模式中,進入跛行行車模式之后,車輛的SOC值降低明顯變緩,能夠達到跛行回家的控制目標。在今后工作中,需要著重研究履帶式電動拖拉機起動時的控制策略。
[1] 楊志平.電動農業機械發展現狀和趨勢分析[J].農業機械,2013(31):103-104.
[2] 混合動力拖拉機試驗臺設計研究[D].鄭州:河南科技大學,2015.
[3] STANISLAV F,DMITRY I,LEV M,et al.Complete traction electric equipment sets of electro-mechanical drive trains for tractors[C]//Computational Technologies in Electrical and Electronics Engineering(SIBIRCON).Listvyanka:IEEE,2011:611-616.
[4] 華夢新.純電動車整車控制策略的研究[D].哈爾濱:哈爾濱工業大學,2011.
[5] HIROSHI Fujimono,KIYOSHI Fuji,NAOKI Takashi.Vehicle Stability Control of Electric Vehicle with Slip-ratio and Cornering Stiffness Estimation[C]//IESS/ASME internation conference on Advanced intelligent mechatronics.2007:1-6.
[6] 陶永華,尹怡欣,葛蘆生.新型PID控制及其應用[M].北京:機械工業出版社,1998.
[7] 胡包鋼,應浩.模糊PID控制技術研究發展回顧及其面臨的若干重要問題[J].自動化學報,2001(4):434-446.
[8] 聶希峰,陸古兵,宋輝.穩壓器壓力控制系統灰色預測PID控制方法研究[J].兵器裝備工程學報,2016,37(5):108-110.
[9] 趙廣義,王偉國,李博,等.壓電陶瓷遲滯逆模型的前饋PID控制[J].壓電與聲光,2014,36(6):914-916.
[10] 王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術.2011(01):35-41.
[11] Van LE T.A fuzzy evolutionary approach to constrained optimization problems[C]//Proceedings of the second IEEE Conference on Evolutionary Computation.Perth,1995:274-278.
[12] 羅玉濤,黃向東.并聯式混合動力驅動系統的模糊控制與仿真[J].華南理工大學學報(自然科學版),2003,31(8):92-96.
[13] 王保華,羅永革.基于CRUISE的汽車建模與仿真[J].湖北汽車工業學院學報,2005,19(2):5-8.
[14] 盤朝奉,李桂權,陳龍,等.城市循環工況下純電動汽車動力電池包溫度場分析[J].重慶理工大學學報(自然科學),2016(8):6-12.
[15] 韓如成,潘峰,智澤英.直接轉矩控制理論及應用[M].北京:電子工業出版社,2012.
[16] 俞光,劉賢興.基于遺傳算法的直流無刷電機控制[J].測控自動化,2012(28):65-69.
(責任編輯劉 舸)
ResearchonControlStrategyofTrackedElectricTractorDriveSystem
SHANG Gaogao, ZHANG Jianzhou, ZHANG Jiajun
(College of Automotive and Traffic Engineering, Jiangsu University, Zhengjiang 212013, China)
A set of control strategy of the whole drive system is designed to improve the working efficiency of the tracked electric tractor. In normal mode, the fuzzy self -adjusting PID control strategy was established. In the failure mode, the limp home control strategy was presented. The control strategies were simulated in Matlab/Simulink. The simulation results showed that the target speed can be track in the transport operation mode. In the plough working mode, the speed fluctuation of the tractor is in the acceptable range, and the torque compensation can track the change of the driving resistance. In the failure mode, the tractor can run at fixed speed, with the battery SOC decreasing slowly.
electric tractor; drive system; control strategies
2016-07-10
江蘇省產學研聯合創新資金—前瞻性聯合研究項目 (BY201306504)
商高高(1962—),男,湖北武漢人,博士,副教授,主要從事機電一體化研究,E-mail:shanggaogao@ujs.edu.cn。
商高高,張建舟,張家俊.履帶式電動拖拉機驅動系統控制策略的研究[J].重慶理工大學學報(自然科學),2017(11):32-38.
formatSHANG Gaogao,ZHANG Jianzhou,ZHANG Jiajun.Research on Control Strategy of Tracked Electric Tractor Drive System[J].Journal of Chongqing University of Technology(Natural Science),2017(11):32-38.
10.3969/j.issn.1674-8425(z).2017.11.005
S219.2
A
1674-8425(2017)11-0032-07
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36