一種改進的永磁同步電動機參數(shù)在線辨識方法
2017-12-06 11:27:54石有計
電氣技術 2017年11期
石有計
(鐵嶺師范高等專科學校,遼寧 鐵嶺 112000)
一種改進的永磁同步電動機參數(shù)在線辨識方法
石有計
(鐵嶺師范高等專科學校,遼寧 鐵嶺 112000)
本文提出了一種永磁同步電動機參數(shù)在線辨識的新方法。通過對永磁同步電動機在d-q坐標系下,標準最小二乘法形式的參數(shù)辨識模型的推導,利用帶遺忘因子最小二乘法(FFRLS)對電動機定子電阻值和交直軸電感值進行在線辨識,借助以上辨識結(jié)果,采用模型參考自適應方法(MRAS)再辨識出電動機的永磁磁鏈。同時應用基于Popov超穩(wěn)定性理論設計的PI自適應律,實現(xiàn)各種工況下電動機的永磁磁鏈在線辨識。以一臺0.75kW永磁同步電動機為例進行了仿真與實驗研究,仿真結(jié)果顯示,該方法具有計算量較小、準確度較高且具有較佳的動態(tài)跟蹤辨識特性。
永磁同步電動機;在線辨識;最小二乘法;模型參考自適應法
永磁同步電動機(PMSM)具有結(jié)構(gòu)簡單、節(jié)能高效、高功率密度、控制精準等諸多優(yōu)點,易于構(gòu)成性能優(yōu)良的伺服控制系統(tǒng)。PMSM控制系統(tǒng)性能的優(yōu)劣與電動機參數(shù)的精確度直接相關法各有優(yōu)劣:FFRLS結(jié)果精準、收斂快速,但計算量比較大。MRAS易受外界因素影響,穩(wěn)定性較差。而在實際的運行中,PMSM系統(tǒng)表現(xiàn)為一個時變的動態(tài)系統(tǒng),其系統(tǒng)參數(shù)例如繞組電阻、電感、轉(zhuǎn)子磁鏈等參數(shù)受溫度變化、磁飽和及負載擾動的影響而產(chǎn)生變化,使得控制性能受到影響。為保證相關的控制算法有效運行,需要對電動機參數(shù)進行實時辨識。傳統(tǒng)的參數(shù)辨識方法有:模型參考自適應法、加減速法、最小二乘法、擴展卡爾曼濾波法和人工智能算法等[1]。這些辨識方法雖有欠缺,但計算量較小。本文提出將遞推最小二乘法和模型參考自適應法相融合,將兩者的優(yōu)勢進行互補,用于永磁同步電動機參數(shù)在線辨識。在保證辨識穩(wěn)態(tài)后幾乎不影響MRAS辨識精度的前提下,提高MRAS的辨識速度,改善初始辨識過程中的振蕩。
1 改進的永磁同步電動機參數(shù)在線辨識方法
1.1 帶遺忘因子的遞推最小二乘法原理
該文中選定性能指標為

式中,μ 為遺忘因子,0<μ<1。對于上式的目標函數(shù),其遞推公式如下:
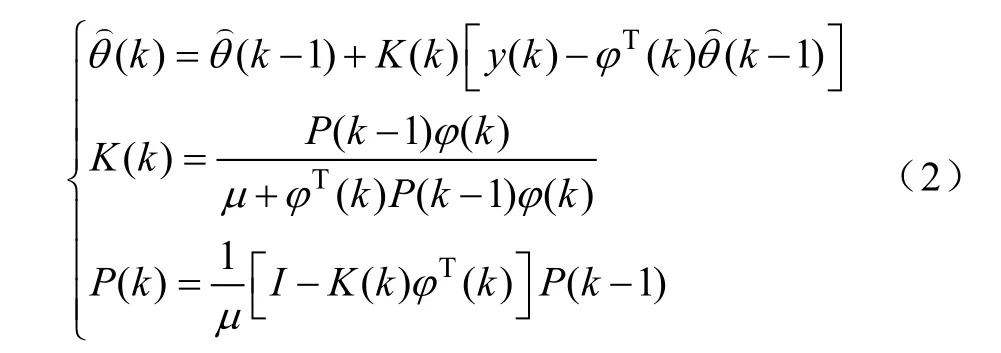
式中,θ 為待辨識參數(shù);K為增益矩陣;? 為觀測矩陣;P為協(xié)方差矩陣。
1.2 定子電阻和交直軸電感辨識
永磁同步電動機在d-q坐標軸系下的狀態(tài)方程為
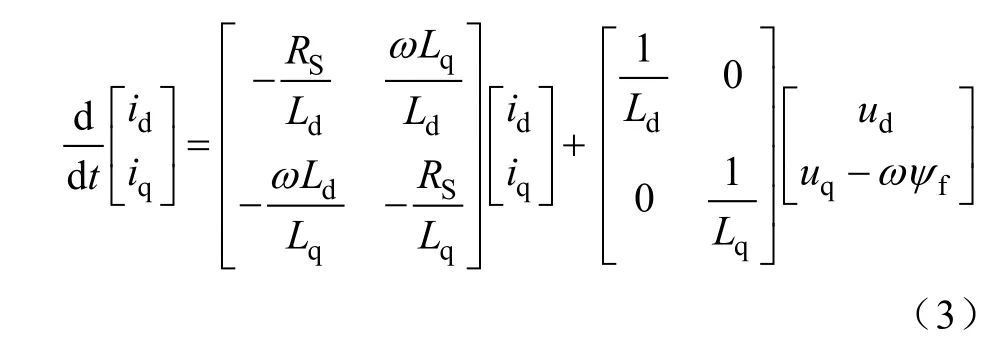
式中,ud、uq分別為d軸、q軸電壓,id、iq分別為d軸、q軸電流,ω 為 PMSM 轉(zhuǎn)子電角速度,Ld、Lq為d軸、q軸電感,RS為每相定子繞組的電阻,ψf為永磁磁鏈。
對式(3)進行離散化處理,變形為最小二乘法形式如下:
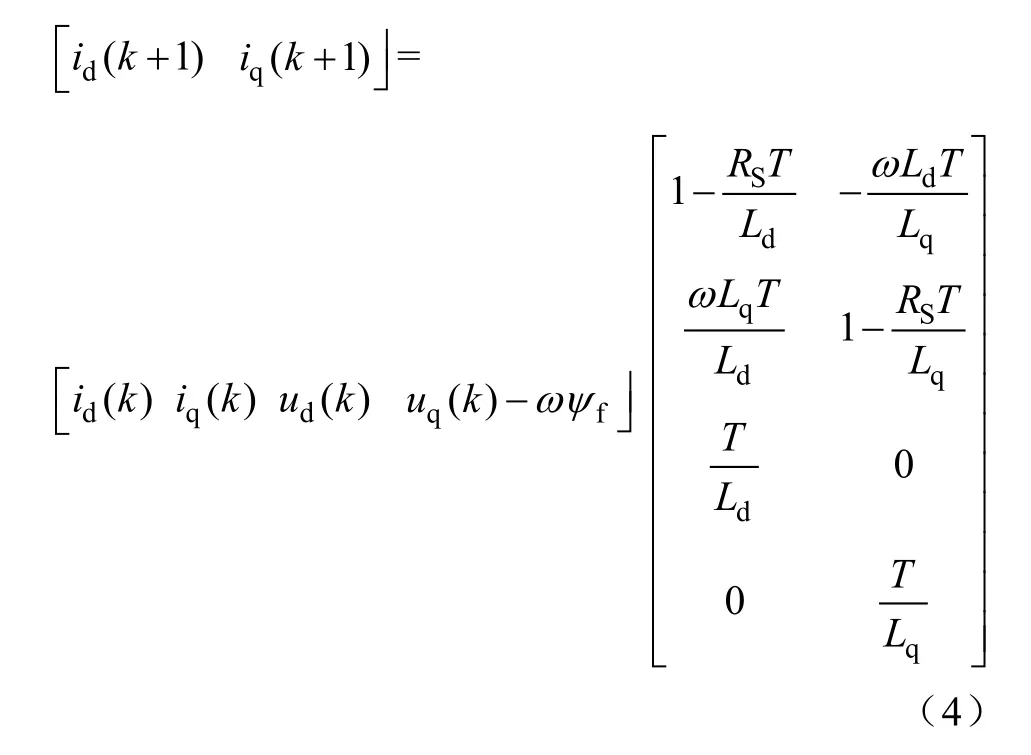
由式(4)可知,式中有未知參數(shù)永磁磁鏈ψf,且ψf只在iq中存在,由此文中采用id=0的矢量控制策略,常態(tài)下,id變化非常小,故將式(5)簡化為
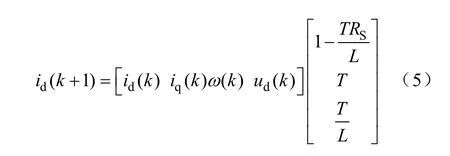
對式(5)中的RS和L可用FFRLS進行在線辨識,令

對應的算法模型為
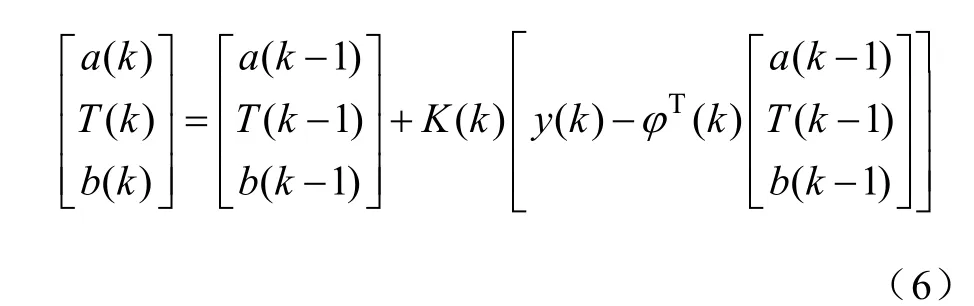
其中:
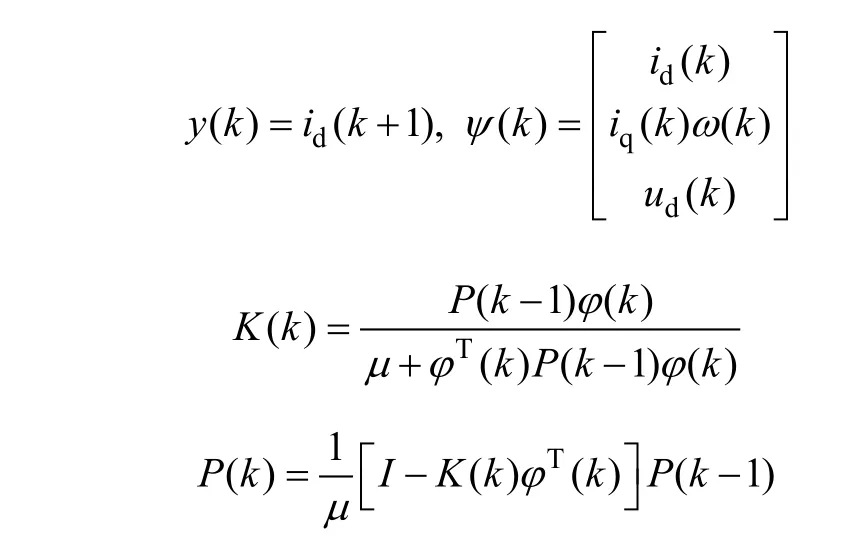
令 P(0)=αI,α 一般取值為 104~1010。先辨識出a和 b值,再利用a(k)和b(k)關系式求解出定子電阻RS和交直軸電感L。
1.3 永磁同步電動機永磁磁鏈辨識
對電動機永磁磁鏈的辨識可利用MRAS方法。MRAS基本結(jié)構(gòu)如圖1所示。
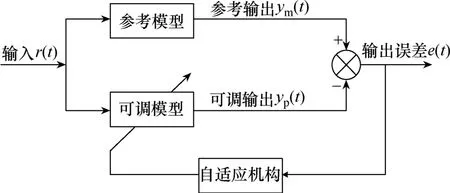
圖1 模型參考自適應控制結(jié)構(gòu)圖
首先將PMSM在d-q坐標系下的參考模型寫成如下形式:

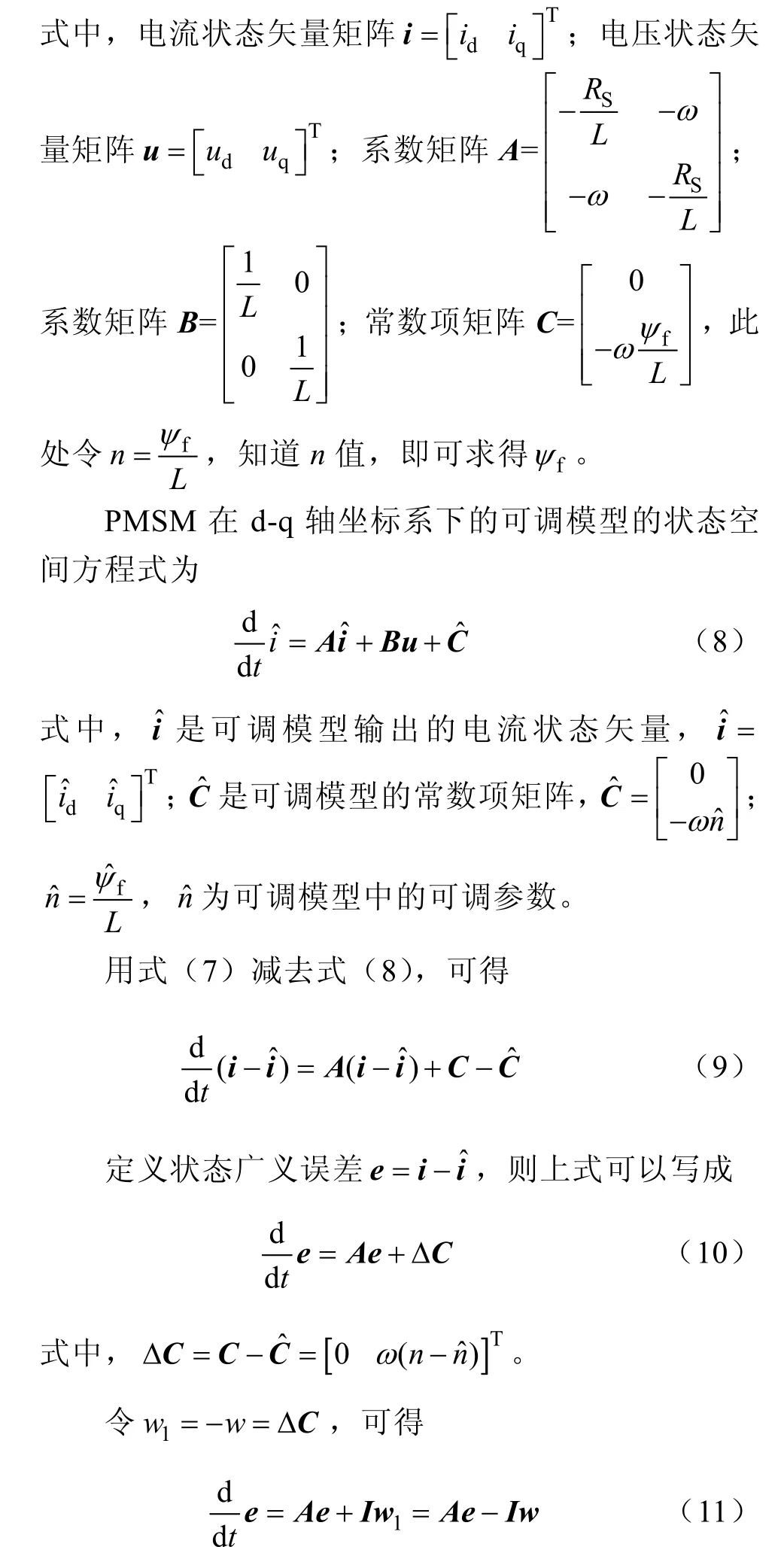
由上面推導,將MRAS系統(tǒng)等效成如圖2所示構(gòu)成的系統(tǒng)。
使用Popov超穩(wěn)定性理論設計自適應規(guī)則,要使式(11)所代表的系統(tǒng)穩(wěn)定,需要滿足:①非線性時變部分滿足Popov積分不等式;②系統(tǒng)的線性定常前向回路部分嚴格正實[2]。
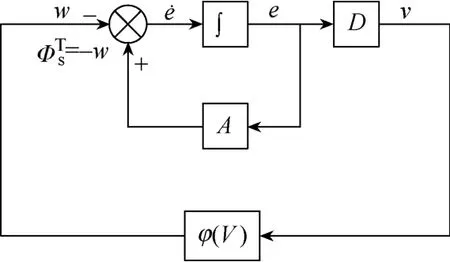
圖2 非線性時變系統(tǒng)框圖
D是引入的補償矩陣,為簡化計算取補償矩陣為單位陣,即 D=I,在 MRAS系統(tǒng)中,選用比例+積分結(jié)構(gòu)的自適應律,即

式中,f1(t)、f2(t)為所求參數(shù)自適應律中對應的函數(shù),(0) 為是參數(shù)n估計的初始值。
根據(jù)系統(tǒng)穩(wěn)定條件1),可得參數(shù)?n的自適應律為

由以上分析知道,可用圖3所示的系統(tǒng)框圖對轉(zhuǎn)子磁鏈進行辨識。

圖3 基于MRAS的永磁磁鏈辨識系統(tǒng)框圖
首先利用FFRLS對RS和L進行在線辨識,其后應用MRAS的方法對ψf進行辨識。其辨識方案框圖如圖4所示。
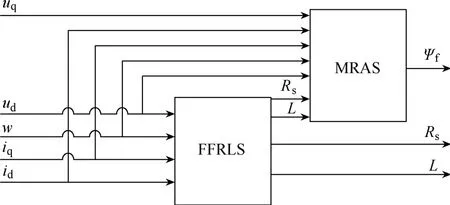
圖4 FFRLS-MRAS電動機參數(shù)辨識方法框圖
2 電動機參數(shù)辨識仿真
2.1 永磁同步電動機參數(shù)辨識仿真
利用Matlab的Simulink模塊進行仿真驗證,搭建 PMSM 雙閉環(huán)矢量控制系統(tǒng)仿真模型如圖 5所示,采用Id=0的控制策略。
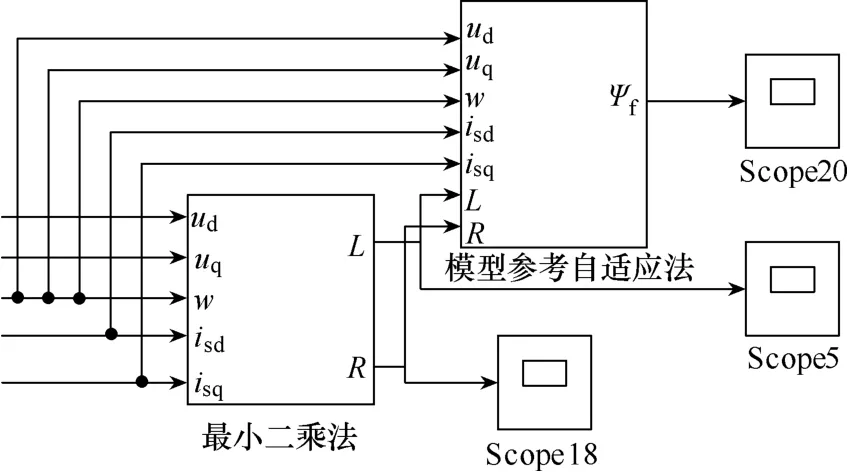
圖5 PMSM電氣參數(shù)在線辨識仿真模型
使用Matlab進行仿真驗證。永磁同步電動機參數(shù)見表1。
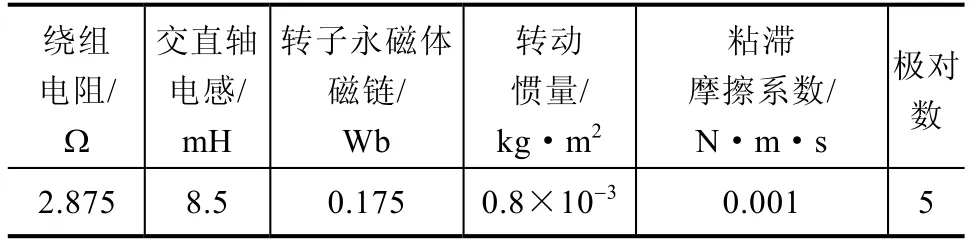
表1 仿真所用電動機參數(shù)
2.2 辨識時間間隔和遺忘因子的選擇
設置電流采樣周期即辨識時間間隔為 0.1ms。參考相關資料知遺忘因子一般選擇 0.9以上。下面對電動機參數(shù)在不同遺忘因子下進行在線辨識。取各個參數(shù)初始值為:RS=2.5Ω,TL=3N·m,轉(zhuǎn)速設定為 30r/min,Lq=Ld=5mH,ψf=0.1Wb,P(0)=105I。圖6和圖7是仿真結(jié)果。
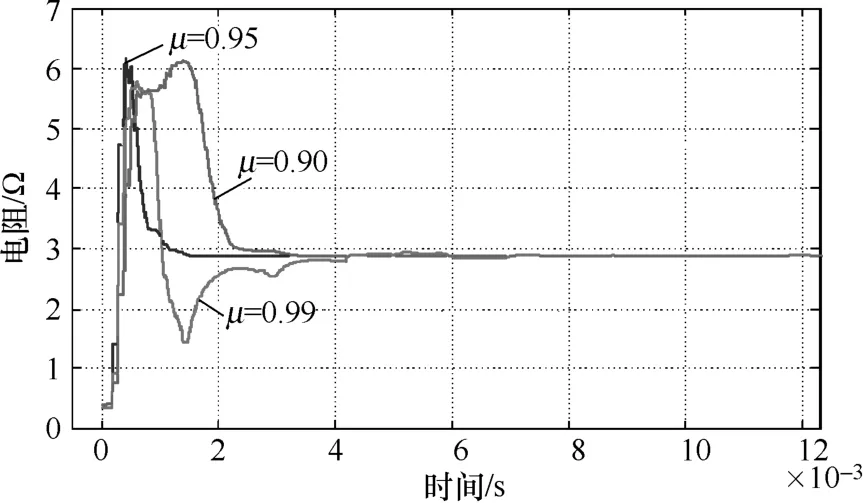
圖6 電動機定子電阻在線辨識波形
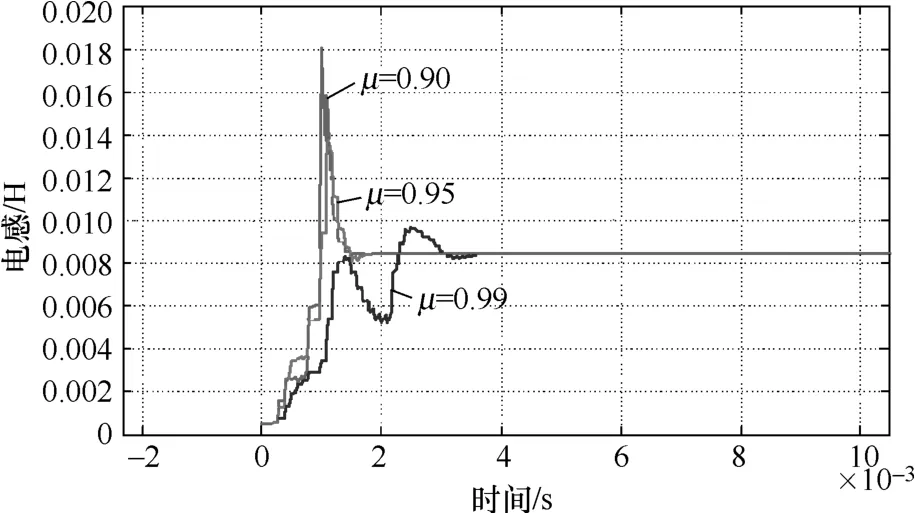
圖7 電動機交直軸電感在線辨識波形
分析圖 6和圖 7的結(jié)果可以看出,遺忘因子μ取值不同,其跟隨性就不同,μ 越接近1,跟隨性越差,辨識值收斂速度越緩慢,但辨識精度越好;μ 越小,跟隨性越強,辨識值收斂速度越快速,辨識精度則越差,從收斂速度和辨識值波動情況兩方面綜合考慮,選取μ 值為0.95比較理想。
2.3 電動機參數(shù)仿真實驗
利用 Matlab/Simulink軟件搭建仿真模型,在Simulink中進行仿真驗證。當工況處于轉(zhuǎn)速為30r/min,恒轉(zhuǎn)矩為3N·m,選取遺傳因子0.95,假設電動機參數(shù)初值為:繞組電阻2.5Ω,交直軸電感5mH,轉(zhuǎn)子永磁體磁鏈為 0,P(0)=105I,對表 1中的PMSM電氣參數(shù)進行在線辨識。其辨識結(jié)果如圖8至圖10所示。
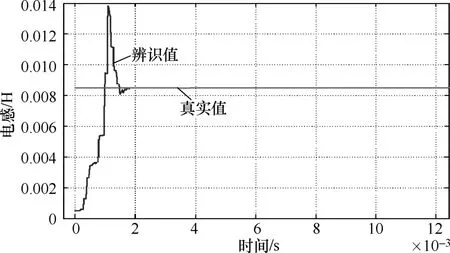
圖9 交直軸電感在線辨識波形(L=8.5mH)
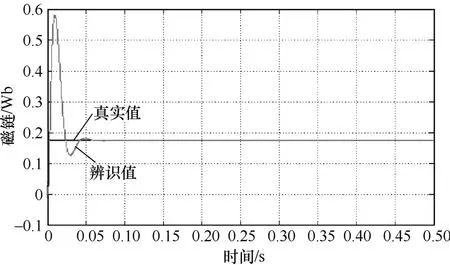
圖10 永磁磁鏈在線辨識波形(ψf=0.175Wb)
由圖8、圖9、圖10可看到:在速度和轉(zhuǎn)矩恒定時,3個參數(shù)快速收斂到真實值,在不超過 0.1s的時間內(nèi),辨識出了RS、L、ψf3個參數(shù)。0.1s時辨識結(jié)果見表 2。由表 2可看出,辨識結(jié)果準確,誤差很小。
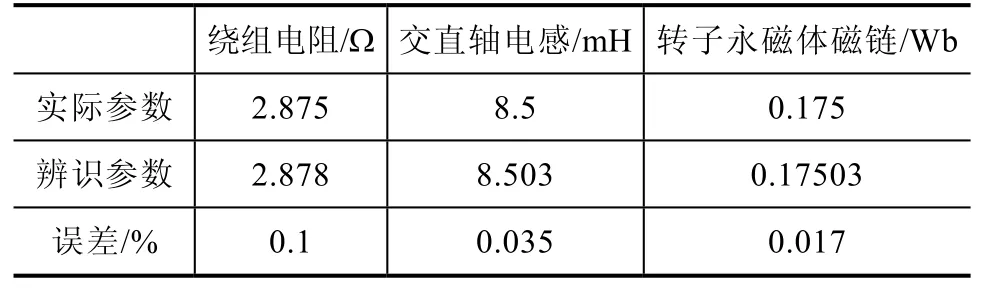
表2 辨識參數(shù)結(jié)果表
3 結(jié)論
本文在傳統(tǒng)參數(shù)辨識的基礎上提出了一種改進型的永磁電動機參數(shù)辨識算法。將FFRLS和MRAS兩種算法優(yōu)勢相結(jié)合進行電動機參數(shù)的在線辨識。該方法能在不添加額外的激勵信號的情況下把電動機電氣參數(shù)一次性全部辨識出來。仿真和試驗結(jié)果顯示,該方法對PMSM的電氣參數(shù)辨識精度較高,可有效提高辨識結(jié)果的收斂速度,具有較強的抗干擾能力,能縮短辨識時間,減少辨識動態(tài)過程振蕩。實例驗證了文中提出的永磁同步電動機參數(shù)在線辨識方法的有效性,具有一定的實際應用價值。
[1] 龐中華, 崔紅. 系統(tǒng)辨識與自適應控制 MATLAB仿真[M]. 北京: 北京航空航天大學出版社, 2009.
[2] 趙金越, 關新, 胥德龍, 等. 基于模型參考自適應的電動車用永磁同步電動機無速度傳感器控制系統(tǒng)研究[J]. 電氣技術, 2017, 18(2): 36-40.
[3] 王松. 永磁同步電動機的參數(shù)辨識及控制策略研究[D]. 北京: 北京交通大學, 2011.
[4] 周虎. 永磁同步電動機參數(shù)在線辨識算法研究[D].成都: 電子科技大學, 2012.
[5] 向純靖, 李長兵. 基于最小二乘法的永磁同步電動機參數(shù)辨識[J]. 微特電機, 2012, 40(2): 30-33.
[6] 荀倩, 王培良, 李祖欣, 等. 基于遞推最小二乘法的永磁伺服系統(tǒng)參數(shù)辨識[J]. 電工技術學報, 2016,31(17): 161-169.
[7] 陳亞杰, 高亮. 基于混合算法的變壓器參數(shù)辨識[J].電氣技術, 2014, 15(1): 11-15.
[8] 楊宗軍, 王莉娜. 表貼式永磁同步電機的多參數(shù)在線辨識[J]. 電工技術學報, 2014, 29(3): 111-118.
[9] 劉侃. 永磁同步電動機多參數(shù)在線辨識研究[D]. 長沙: 湖南大學, 2011: 10-37.
[10] 趙穎偉, 王毅, 李可. 基于 MRAS的改進永磁同步電動機參數(shù)辨識方法[J]. 微電動機, 2014, 47(2):29-32.
[11] Liu Kan, Zhang Qiao, Zhu Ziqiang, et al. Comparison of two novel MRAS based strategies for identifying parameters in permanent magnet synchronous motors[J].International Journal of Automation and Computing,2010, 7(4): 516-524.
[12] Wang Weihua, Xiao Xi. Research on predictive control for PMSM based on online parameter identification[C]//IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, 2012: 1982-1986.
Improved Method of On-line PMSM Parameters Identification
Shi Youji
(Tieling Teachers College, Tieling, Liaoning 112000)
A new method of on-line parameters identification of Permanent Magnet Synchronous Motor (PMSM) is proposed in this paper. The parameter identification model of PMSM in the d-q coordinate system is deduced according to the standard form of least squares method. The Forgetting Factor Recursive Least Square (FFRLS) is used to identify stator resistance value and direct axis and quadrature axis inductance value online. Based on the above identification results, the Model Reference Adaptive System (MRAS) is used to identify the permanent magnet flux linkage of the motor. The PI adaptive law based on design of Popov hyperstability theory is used to realize the on-line identification of permanent magnet flux linkage of the motor under various operating conditions. Finally, the simulation and experiment are developed with a 0.75kW PMSM as an example. The simulation results show that the proposed method in this paper has the advantages of less computation, high accuracy and better dynamic tracking performance.
PMSM;on-line identification;least squares method;MRAS
石有計(1965-),男,副教授,主要研究方向為特種電動機及其控制技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
