KAZE算法在巡線機(jī)器人障礙物檢測中的應(yīng)用
2017-12-08 03:42:03張蒙
張 蒙
(河海大學(xué) 文天學(xué)院電氣信息工程系,安徽 馬鞍山 243000)
KAZE算法在巡線機(jī)器人障礙物檢測中的應(yīng)用
張 蒙
(河海大學(xué) 文天學(xué)院電氣信息工程系,安徽 馬鞍山 243000)
巡線機(jī)器人障礙物檢測技術(shù)是計(jì)算機(jī)視覺與自主巡檢系統(tǒng)的研究熱點(diǎn)之一,對保證輸電系統(tǒng)安全可靠運(yùn)行具有重要意義.傳統(tǒng)的檢測算法魯棒性低,不能適應(yīng)復(fù)雜環(huán)境下障礙物的檢測要求.針對以上問題,提出一種基于KAZE算法的巡線機(jī)器人障礙物檢測方法,該算法在非線性尺度空間中進(jìn)行特征點(diǎn)提取,利用最近鄰匹配準(zhǔn)則和RANSC算法對由M-SURF算法生成的特征向量進(jìn)行檢測.實(shí)驗(yàn)結(jié)果表明,基于KAZE算法的巡線機(jī)器人障礙物檢測效果較好,具有良好的的魯棒性.
KAZE算法;巡線機(jī)器人;障礙物檢測;魯棒性
輸電線路作為傳送電力的重要設(shè)備,其安全運(yùn)行關(guān)系到電力系統(tǒng)的可靠性.常用的人工巡檢方式工作量大、效率低,存在漏檢和誤檢現(xiàn)象[1-2].巡線機(jī)器人的出現(xiàn)使輸電線路的檢測有了新方法,要想高效高質(zhì)量完成巡檢任務(wù),需要深入研究設(shè)計(jì)越障機(jī)構(gòu)、檢測識別障礙物、定位電力線故障、運(yùn)動控制、自主導(dǎo)航等內(nèi)容[3-4].其中檢測識別障礙物是指機(jī)器人在線路帶電情況下沿相線或地線爬行時(shí),自主識別防震錘、耐張線夾、懸垂線夾、桿塔等障礙,從而提高自主巡檢的可靠性和準(zhǔn)確率.自主識別障礙物中,圖像匹配算法是關(guān)鍵技術(shù),匹配算法的合適與否,將直接影響障礙物類型的判斷[5-6].
常用的特征匹配算法,如Harris、SIFT、SURF等算法,在一定程度上均能得到較好的檢測結(jié)果,但并不適合復(fù)雜背景下巡線機(jī)器人的障礙物檢測與識別.
鑒于此,本文提出了將KAZE算法應(yīng)用到巡線機(jī)器人中,以增強(qiáng)系統(tǒng)檢測的魯棒性,有利于提高整個(gè)機(jī)器人導(dǎo)航的精度、靈敏度.
KAZE算法是基于非線性尺度空間的特征點(diǎn)檢測算法[7],相對于 Harris、SIFT等傳統(tǒng)算法,其魯棒性、局部精度及匹配性能更高,具有尺度、仿射、視角、光照不變性, 在目標(biāo)的運(yùn)動、遮擋、噪聲等因素影響下也能保持較好的檢測效果,適合于巡線機(jī)器人的障礙物圖像背景復(fù)雜的特點(diǎn).
1 KAZE特征點(diǎn)檢測
KAZE算法是基于非線性尺度空間的算法,其特征點(diǎn)檢測主要包括4個(gè)步驟:構(gòu)造非線性尺度空間、非線性尺度空間特征點(diǎn)的檢測、特征點(diǎn)精確定位、特征向量符生成[7].
1.1 非線性尺度空間的構(gòu)造
尺度空間理論最早出現(xiàn)于計(jì)算機(jī)視覺領(lǐng)域,其目的是模擬圖像數(shù)據(jù)的多尺度特征,主要思想是將圖像與某種變換核進(jìn)行卷積運(yùn)算,得到基于該變換的圖像序列.
KAZE算法首先進(jìn)行高斯卷積,降低圖像噪聲、幾何變形和輻射畸變等干擾;再計(jì)算圖像的梯度直方圖以得到非線性擴(kuò)散方程中控制擴(kuò)散級別的對比度參數(shù) k,確定邊緣信息保留量;最后根據(jù)尺度參數(shù)時(shí)間t構(gòu)造非線性空間,利用AOS算法求解得到非線性尺度空間的所有圖像[8].
非線性擴(kuò)散方程可由非線性偏微分方程

表達(dá),其中u圖像亮度div為散度算子,時(shí)間t為尺度參數(shù),▽uσ為高斯濾波后的圖像梯度,為傳導(dǎo)函數(shù)

其中k是控制擴(kuò)散級別的對比度參數(shù),其值越小,保留的邊緣信息越多.
在構(gòu)建非線性尺度空間時(shí),KAZE算法非線性尺度空間分為o組(octave),每組有 S層(level),每組圖像都采用和原始圖像相同的分辨率.組數(shù)o、層數(shù)S與尺度參數(shù)σ的對應(yīng)關(guān)系為
其中iσ為以像素為單位的尺度參數(shù);σ0是尺度參數(shù)的初始基準(zhǔn)值;N=o*S是整個(gè)尺度空間包含的圖像總數(shù).
由于Perona-Malik非線性擴(kuò)散方程是以時(shí)間t為尺度參數(shù)的,需要將iσ轉(zhuǎn)換為時(shí)間單位.在高斯尺度空間下,使用標(biāo)準(zhǔn)差為σ的高斯核對圖像進(jìn)行卷積,相當(dāng)于對圖像進(jìn)行持續(xù)時(shí)間為的濾波,因此其轉(zhuǎn)換公式為

只要使傳導(dǎo)函數(shù)g()恒等于1(即g()是一個(gè)常量函數(shù)),非線性尺度空間就等同于高斯尺度空間.而且隨著尺度層級的提升,除了那些對應(yīng)于目標(biāo)輪廓的圖像邊緣像素外,大部分像素對應(yīng)的傳導(dǎo)函數(shù)值將趨于一個(gè)常量值.
1.2 非線性尺度空間的特征點(diǎn)檢測
KAZE的特征點(diǎn)檢測是通過尋找不同尺度的Hessian局部極大值點(diǎn)來實(shí)現(xiàn)的.Hessian矩陣的計(jì)算公式為

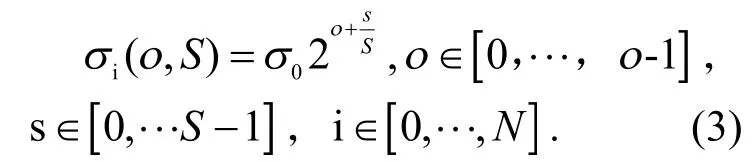
其中σ是尺度參數(shù)σi的整數(shù)值.在尋找極值點(diǎn)時(shí),計(jì)算每一個(gè)像素點(diǎn)在各個(gè)層級的 Hessian行列式值,和它所有的相鄰點(diǎn)比較,當(dāng)其大于它的圖像域和尺度域的所有相鄰點(diǎn)時(shí),即為極值點(diǎn).理論上其比較的范圍是當(dāng)前尺度、上一尺度和下一尺度上的3個(gè)大小為σi×σi的矩形窗口.不過為了加快搜索速度,窗口大小固定為3×3,如圖1所示,中間的點(diǎn)與它同尺度的8個(gè)相鄰點(diǎn)以及上下相鄰尺度對應(yīng)的的9*2個(gè)點(diǎn)共26個(gè)點(diǎn)比較.
圖1 特征點(diǎn)檢測
1.3 特征點(diǎn)的精確定位
KAZE算法特征點(diǎn)的精確定位采用的是Lowe在BMVC2002提出的方法[11],即通過空間尺度函數(shù)泰勒展開式以精確確定關(guān)鍵點(diǎn)的位置和尺度,同時(shí)去除低對比度的關(guān)鍵點(diǎn)和不穩(wěn)定的邊緣響應(yīng)點(diǎn),以增強(qiáng)匹配穩(wěn)定性、提高抗噪聲能力.空間尺度函數(shù)[12]泰勒展開式為

對上式求導(dǎo),并令其為 0,求解得到特征點(diǎn)的亞像素坐標(biāo)

在已經(jīng)檢測到的特征點(diǎn)中,要去除低對比度的關(guān)鍵點(diǎn),將式(7)代入式(6),只取前兩項(xiàng)可得
求出,導(dǎo)數(shù)由采樣點(diǎn)相鄰差估計(jì)得到.
U的主曲率和H的特征值成正比,設(shè)α為較大的特征值,β為較小的特征值,則

令α=γβ,則


1.4 特征向量符生成
1.4.1 特征點(diǎn)主方向確定
特征點(diǎn)的尺度參數(shù)為iσ,則對其半徑為6iσ的搜索圈內(nèi)所有鄰點(diǎn)的一階微分值ux和uy進(jìn)行高斯加權(quán),使得靠近特征點(diǎn)的響應(yīng)貢獻(xiàn)大,而遠(yuǎn)離特征點(diǎn)的響應(yīng)貢獻(xiàn)小;將這些微分值視作向量空間中的點(diǎn)集,在一個(gè)角度為 60°的扇形滑動窗口內(nèi)對點(diǎn)集進(jìn)行向量疊加,遍歷整個(gè)圓形區(qū)域(如圖2所示)獲得最長向量的角度就是主方向.
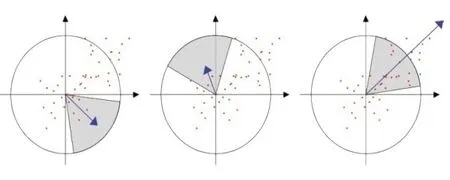
圖2 特征點(diǎn)主方向確定
1.4.2 構(gòu)造特征描述向量
利用M-SURF算法[13-14],具體方法如下:對于尺度參數(shù)為σi的特征點(diǎn),在梯度圖像上以特征點(diǎn)為中心取一個(gè) 24σi×24σi的窗口,并將窗口劃分為 4×4 個(gè)子區(qū)域,每個(gè)子區(qū)域大小為 9σi×9σi,相鄰的子區(qū)域有寬度為2σi的交疊帶.每個(gè)子區(qū)域都用一個(gè)高斯核(σ1=2.5σi)進(jìn)行加權(quán),然后計(jì)算出長度為4的子區(qū)域描述向量:

再通過另一個(gè)大小為4×4的高斯窗口(σ2=1.5σi)對每個(gè)子區(qū)域的向量dv進(jìn)行加權(quán)并進(jìn)行歸一化處理,去除光照影響.因此,對每一個(gè)特征點(diǎn),形成4×4×4=64維的描述向量.
1.5 特征向量匹配
生成KAZE特征向量后進(jìn)行特征匹配.對巡線機(jī)器人障礙物圖像而言,希望能確定盡量多的、比較精確且分布均勻的關(guān)鍵點(diǎn),然后通過數(shù)據(jù)擬合來減少整體誤差.依照 Lowe[12]的思路,首先如果特征點(diǎn)最近鄰與次近鄰的歐氏距離之比小于某個(gè)閾值,則接受這一對匹配點(diǎn).其次采用模型參數(shù)魯棒估計(jì)的RANSAC算法,利用特征集合的內(nèi)在幾何約束關(guān)系進(jìn)一步剔除錯誤的匹配點(diǎn).
2 實(shí)驗(yàn)結(jié)果及分析
實(shí)驗(yàn)使用主頻3.6 GHz的win7電腦,實(shí)驗(yàn)環(huán)境為VS2010.為充分驗(yàn)證KAZE算法在巡線機(jī)器人障礙物檢測應(yīng)用中的優(yōu)越性能,本文選用60幅不同類型的障礙物圖像對(絕緣子、防震錘、懸垂線夾)與SIFT算法進(jìn)行對比實(shí)驗(yàn),圖像均受不同程度的亮度、噪聲、旋轉(zhuǎn)、縮放以及視點(diǎn)變化的影響且背景復(fù)雜.4組實(shí)驗(yàn)結(jié)果圖像大小均為470×500,第1組為光照影響下的絕緣子的檢測結(jié)果見圖3,第2組為向右旋轉(zhuǎn)10°后絕緣子的檢測結(jié)果見圖4,第3組為水平拉伸1.2倍后絕緣子的檢測結(jié)果見圖5,第4組為向左旋轉(zhuǎn)5°水平拉伸1.1倍后絕緣子的檢測結(jié)果見圖6.
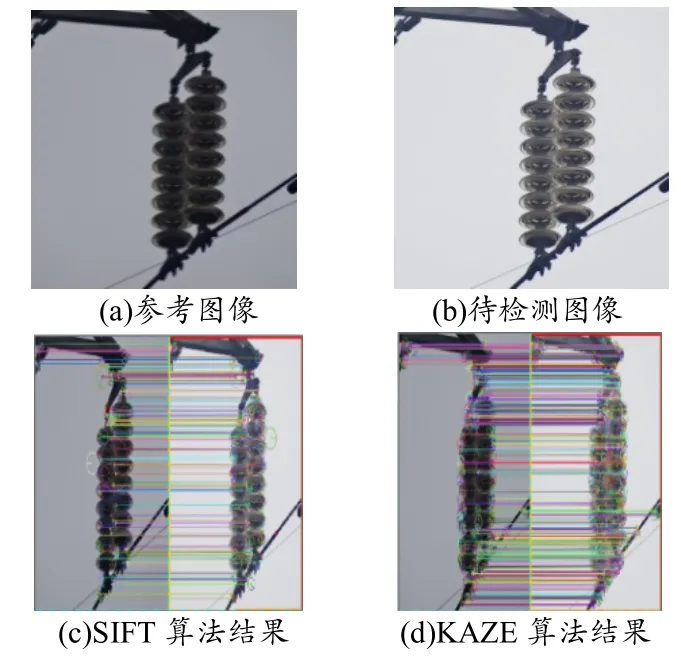
圖3 第1組光照影響下檢測結(jié)果對比

圖4 第2組旋轉(zhuǎn)變化下檢測結(jié)果對比
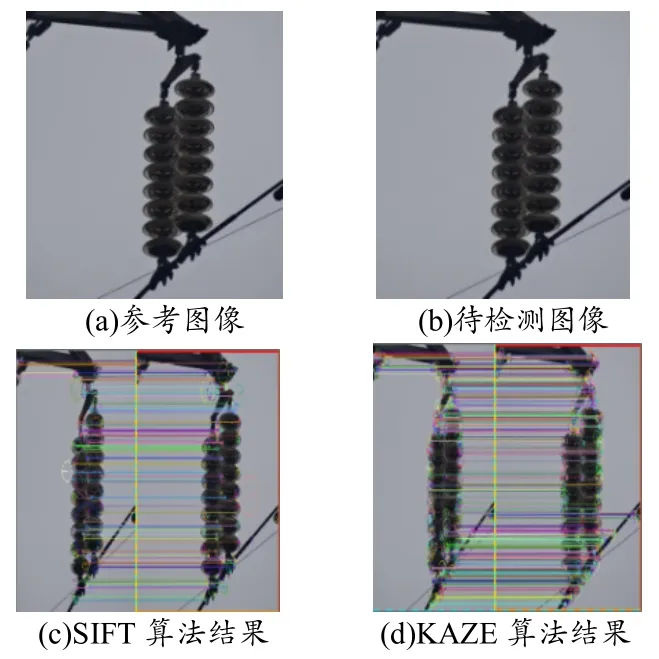
圖5 第3組尺度變化下檢測結(jié)果對比

圖6 第4組旋轉(zhuǎn)尺度變化下檢測結(jié)果對比
實(shí)驗(yàn)表明,在背景復(fù)雜且障礙物圖像存在各種畸變的情況下,KAZE算法能提取較多的特征點(diǎn),為巡線機(jī)器人后續(xù)的立體匹配奠定基礎(chǔ),更準(zhǔn)確地實(shí)現(xiàn)障礙物的檢測.在匹配率方面,光照、旋轉(zhuǎn)影響下SIFT和KAZE算法均表現(xiàn)良好,但在尺度變化及多種因素綜合影響下,KAZE算法的匹配率均高于SIFT算法,魯棒性更好,在60幅障礙物實(shí)驗(yàn)中KAZE算法的平均匹配率達(dá)85%以上,將KAZE算法應(yīng)用于巡線機(jī)器人中能夠有效提高機(jī)器人的自主導(dǎo)航與避障的可靠性與準(zhǔn)確率.圖3~圖6實(shí)驗(yàn)的詳細(xì)數(shù)據(jù)見表1.
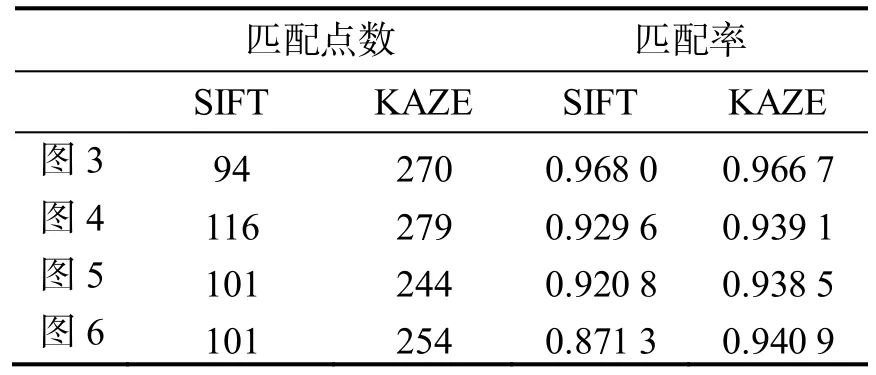
表1 絕緣子檢測結(jié)果對比
4 結(jié)語
本文提出了將KAZE算法應(yīng)用于巡線機(jī)器人應(yīng)用的方法,該方法在非線性尺度空間中提取障礙物的特征點(diǎn),其次利用M-SURF算法生成特征向量,最后通過最近鄰準(zhǔn)則和RANSC算法進(jìn)行特征向量匹配,從而獲得檢測結(jié)果.實(shí)驗(yàn)結(jié)果表明,該方法具有魯棒性好、匹配率高等特點(diǎn),對巡線機(jī)器人的障礙物檢測能達(dá)到較好的結(jié)果.
[1]KATRASNIK J, PERNUS F, LIKAR B. A survey of mobile robots for distribution power line inspection[C]. IEEE Transactions on Power Delivery, 2010, 25(1): 485-493.
[2]王長濱, 葉詠梅, 陳永輝, 等. 采用直升機(jī)開展500kV輸電線路巡視及事故搶修探討[J]. 黑龍江電力技術(shù), 1999, 21(2):44-47.
[3]周風(fēng)余, 吳愛國, 李貽斌, 等. 高壓架空輸電線路自動巡線機(jī)器人的研制[J]. 電力系統(tǒng)自動化, 2004, 28(23): 89-91.
[4]陳中偉, 肖華, 吳功平. 高壓巡線機(jī)器人電磁傳感器導(dǎo)航方法[J]. 傳感器與微系統(tǒng), 2006, 25(9): 33-35.
[5]王慧燕. 圖像邊緣檢測和圖像匹配研究及應(yīng)用[D]. 杭州: 浙江大學(xué), 2003.
[6]林國, 李偉超. 輸電線路巡線機(jī)器人障礙物識別綜述[J]. 鄭州輕工業(yè)學(xué)院學(xué)報(bào): 自然科學(xué)版, 2012, 27(3): 93-97.
[7]ALCANTARILLA P F, BARTOLI A, DAVISON A J. KAZE Features[C]. European Conference on Computer Vision,Springer-Verlag, 2012: 214-227.
[8]JIANG M, GUO R, ZHANG Z,et al. Parallel implementation for AOS scheme on a dual-core cluster[C]. International Conference on Intelligent Networks and Intelligent Systems, IEEE Computer Society, 2010: 362-365.
[9]SONKA M, HLAVAC V, BOYLE R. 圖像處理分析與機(jī)器視覺[M]. 2版. 北京: 人民郵電出版社, 2003.
[10]VURAL M F, YARDIMCI Y, TEMLZEL A. Registration of multispectral satellite image with gradient-corrected SIFT[C].Geoscience and Remote Sensing Symposium, 2009 IEEE International, igarss. IEEE, 2010: III-243-III-246.
[11]BROWN M, LOWE D G. Invariant features from interest point groups[C]. British Machine Vision Conference, Cardiff, Uk,DBLP, 2002: 656-665.
[12]LOWE D. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004,60(2): 91-110.
[13]PIZARRO D, BARTOLI A. Feature-based deformable surface detection with self-occlusion reasoning[J]. International Journal of Computer Vision, 2012, 97(1): 54-70.
[14]CECH J, MATAS J, PERDOCH M. Efficient sequential correspondence selection by cosegmentation[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2010,32(9): 1568-1581.
(責(zé)任編校:蔣冬初)
Inspection Robot Obstacle Detection Based on KAZE Algorithm
ZHANG Meng
(School of Electrical Information Engineering, HoHai University WenTian College, Maanshan, Anhui 243000, China)
Inspection robot obstacle detection technology is one of the hot spots of computer vision and autonomous inspection system . It is important for ensuring the safe and reliable operation of transmission system. Low robustness of traditional detection algorithm can not meet the requirements on obstacle detection when dealing with complex environment. To solve the above problem, an inspection robot obstacle detection method based on KAZE algorithm is given. The feature extraction is done in the nonlinear scale space, and feature vectors are formed with M-SURF algorithm. Feature vectors detecting is worked through the nearest neighbor algorithm as matching criteria and RANSC generated algorithm. Experimental results show that the effect of inspection robot obstacle detection algorithm based on KAZE can make a good performance with better robustness.
kaze algorithm; inspection robot; obstacle detection; robustness
TP312
A
10.3969/j.issn.1672-7304.2017.03.0014
1672–7304(2017)03–0061–04
2017-05-07
張蒙(1989-),女,河南漯河人,助教,碩士,主要從事計(jì)算機(jī)視覺研究﹒E-mail: 983654234@qq.com.
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54