六氟化硫回收處理中心搬運鋼瓶機器人開發及應用
2017-12-14 09:35:54姚京松劉曉芳
湖北電力 2017年5期
關鍵詞:機械
姚京松,林 磊,陳 東,劉曉芳,楊 旭
(1.國網湖北省電力公司檢修公司,湖北 武漢 430050;2.武漢大學,湖北 武漢 430072)
六氟化硫回收處理中心搬運鋼瓶機器人開發及應用
姚京松1,林 磊1,陳 東2,劉曉芳,楊 旭1
(1.國網湖北省電力公司檢修公司,湖北 武漢 430050;2.武漢大學,湖北 武漢 430072)
針對國網湖北省電力公司六氟化硫氣體回收處理中心的需求,設計開發了一種搬運鋼瓶的機器人。介紹了機器人的結構和設計方法,規劃了倉庫的布局,詳細分析了機器人的控制要求和實現方法。機器人使用后基本實現了無人化,滿足了六氟化硫氣體鋼瓶倉儲的智能化管理和無人化作業的要求。搬運鋼瓶機器人是在通用AGV基礎上開發而成,實用性強,安全性高,經濟性好,便于推廣使用。
六氟化硫倉庫;搬運鋼瓶機器人;開發
0 引言
六氟化硫氣體(SF6)是一種理想的絕緣介質,具有極好的絕緣滅弧性能,廣泛應用在電力行業中。雖然六氟化硫本身對人體無毒、無害,但它卻是一種溫室效應氣體,其單分子的溫室效應是二氧化碳的2.2萬倍,是《京都議定書》中被禁止排放的6種溫室氣體之一。同時,SF6氣體在電氣設備中使用時,在電弧或異常局部放電的作用下,會分解出有劇毒或強腐蝕性質的物質,這些廢氣對人和環境都有不同程度的危害[1]。SF6氣體儲存在氣體鋼瓶之中,鋼瓶直徑220 mm,高1 480 mm,滿氣重量100 kg左右,使用人工搬運時需要多人協作完成;另外,SF6氣體鋼瓶屬于高壓薄壁容器,搬運過程存在一定的危險性,泄漏的化學氣體還可能對工作人員造成傷害。
1 搬運鋼瓶機器人總體設計方案
國網湖北省電力公司六氟化硫氣體回收處理中心(以下簡稱處理中心)是在國家電網公司“減少污染物和廢棄物排放,回收再利用SF6氣體”的要求下建立的,實現了國網湖北省電力公司對公司內部SF6氣體回收、處理再利用的集中管理,有效的實現了控制和杜絕SF6氣體排放,對加快綠色電網建設、履行國家電網公司的社會責任具有重要意義。
隨著現代電力管理技術水平的發展,迫切要求對處理中心六氟化硫鋼瓶倉儲進行智能化管理[2],實現無人化運行,因此提出開發一種可用于處理中心的搬運鋼瓶機器人,替代人工作業,實現在倉庫內外搬運氣體鋼瓶。搬運鋼瓶機器人能夠替代人工將SF6鋼瓶進行存取、搬運和碼垛。搬運鋼瓶機器人由AGV導航車、機械臂、主框架、底盤、控制系統等模塊構成[3]。它的特點是可通過編程來完成各種預期的作業任務,在構造和性能上兼有人和機器的優點。
1.1 機器人需要完成的工作
(1)輔助裝、卸貨功能。可以自動行駛至運貨車指定停車區域,在工作人員操控下完成裝貨或者卸貨。
(2)存放鋼瓶。機器人在抓取鋼瓶之后,按照庫管軟件的要求,通過磁條路徑將鋼瓶運送至專用貨架前,自動將氣體鋼瓶放置在貨架上。
(3)取出鋼瓶。機器人在收到庫管系統取貨指令之后,按照庫管軟件的要求,通過磁條路徑自動進入倉庫,走行到鋼瓶專用貨架前,自動將放置在貨架上的氣體鋼瓶抓取,并且沿著磁條路徑走出倉庫,將氣體鋼瓶運送到接貨區。
1.2 機器人結構
搬運鋼瓶機器人屬于重載機器人,綜合考慮經濟性、功能實用性、機動性、承載力等多方面因素,采用導航背負式機器人。搬運鋼瓶機器人整體運行方式為磁條導航。
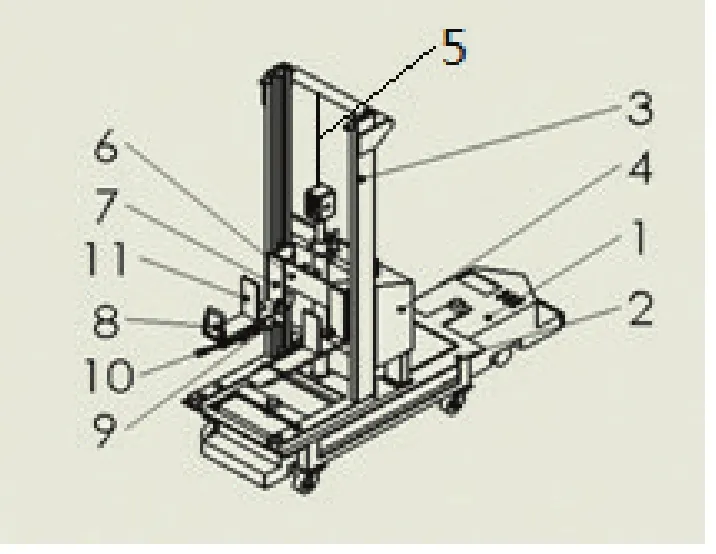
圖1 搬運鋼瓶機器人總體結構Fig.1 The overall structure of the cylinder robot
搬運鋼瓶機器人由磁條引導式AGV小車、升降機構、鋼瓶抓取機構、控制系統組成,總高度為1 971 mm,機械臂升降的有效行程為1 300 mm,機械臂處于最頂端時高1 750 mm,處于最低端時高450 mm,如圖1所示。搬運機器人的機械臂升降機構、鋼瓶抓取機構布置在磁導式AGV上面。AGV小車1與主框架2通過銷軸連接并用軸套固定,連接處安裝有燕尾螺栓限制主框架2的自由度,主框架2與升降架3以及液壓泵站4通過螺栓連接在一起;升降架3的兩側U型導槽上安裝有多個行程開關用于檢測叉架上升的位置;液壓泵站為頂升油缸和夾緊油缸提供動力,頂升油缸的最大推力為2 000 kg,有效行程為750 mm,使用傳動鏈5與叉架6連接起來。機械臂7上安裝有鋼瓶的壓緊機構,防止運輸時鋼瓶晃動。壓緊機構由壓板8、夾緊油缸9、連桿10、擋板11組成,壓板8與機械臂7鉸接,夾緊油缸9與機械臂7通過法蘭連接,擋板11與機械臂7焊接。夾緊油缸9由電磁閥控制,通過連桿10將壓板8頂起從而壓緊鋼瓶。搬運機器人抓取鋼瓶的方式是橫向抓取,在運輸過程中鋼瓶處于升降架最低點。
2 導航設計及倉庫布局
搬運鋼瓶機器人整體運行方式為磁條導航。定制的AGV導航小車具有磁條導航的能力,根據需要在倉庫地面布置磁條導軌,在需要執行停止、轉彎、倒退等命令的位置安裝對應RFID定位芯片[4],在AGV導航小車底部安裝有磁傳感器,當AGV導航小車運動到RFID芯片安裝位置時,可在該位置對需要進行的動作做出判斷,并發出對應指令。搬運機器人采用AGV小車走行,走行軌跡采用磁條導向。因此,根據AGV的行走要求,以及鋼瓶的放置要求,需要在倉庫內安裝磁導條、位置傳感器等[5]。
圖2所示為處理中心倉庫布局圖。倉庫平面結構為長12.71 m、寬8.14 m,中間有隔斷墻,門高2.16 m。圖2中黑色輪廓線為倉庫墻壁,黃色線為AGV導航小車行走路線即磁導軌布置線路,藍色框為鋼瓶放置架放置處。
為了提高庫容,便于機器人存、取鋼瓶,需要設計專用的鋼瓶放置架。圖3所示為放置鋼瓶的貨架示意圖。該款鋼瓶放置架可放置3層鋼瓶,層間距為500 mm,貨架最外緣離墻壁距離為500 mm,貨架與貨架的間距為1 020 mm,中間位置留有700 mm的鏤空以方便機械叉臂的進入和退出。貨架的支腳和背部都通過地腳螺栓與地面和墻壁固定。
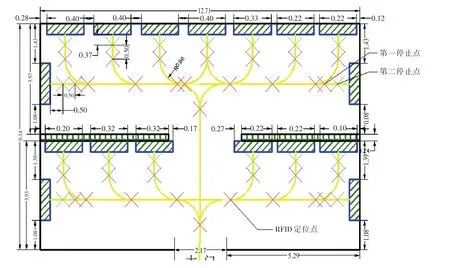
圖2 六氟化硫倉庫布局圖Fig.2 Layout of the sulfur hexafluoride warehouse
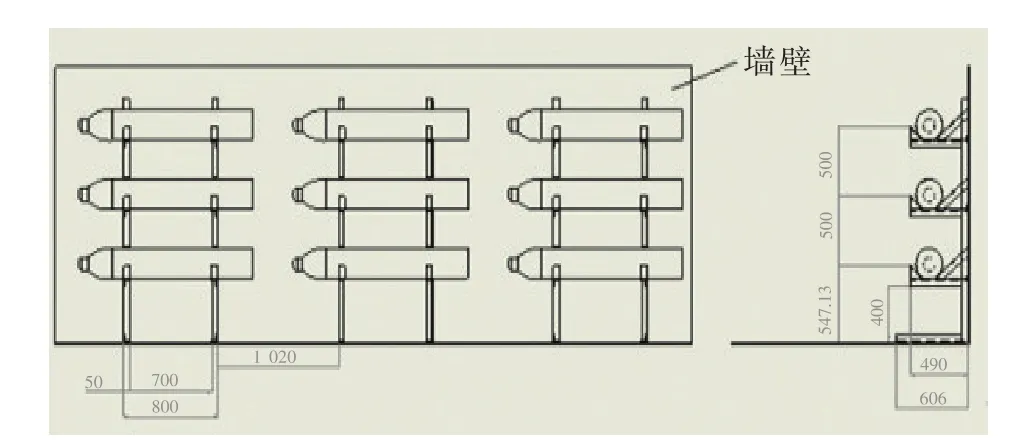
圖3 放置鋼瓶的貨架示意圖Fig.3 Schematic diagram of the shelves for placing cylinders
3 搬運鋼瓶機器人控制
3.1 鋼瓶搬運機器人運動控制系統設計
鋼瓶搬運機器人的動作由AGV與機械臂配合完成。AGV控制系統由AGV廠家完成。機械臂由電磁換向閥進行控制。機器人內部裝有X86架構工業計算機,控制機器人的運行狀態,協調AGV與機械臂的動作。機器人帶有8寸觸摸彩色液晶顯示器,可顯示機器人運行狀態,操作界面為全中文顯示,通過面板可實現以下功能:(1)手動操作執行搬運任務;(2)檢查設備狀態;(3)系統參數設置;(4)監視工作狀態和電池剩余電量。
機器人工作模式分為兩種,一種是全自動運行,按照調度系統指令進行自動工作[6];另一種是手動模式,通過人工手動選擇搬運任務,完成搬運工作,不經過機器人調度系統[7]。
3.2 鋼瓶存放過程
運貨車停至指定停車點后,工作人員通過簡易呼叫器呼叫搬運鋼瓶機器人,搬運機器人通過預先設定路徑到達指定地點后工作人員通過控制面板切換手動遙控模式,人工遙控升降架上升,在確定位置后,人工輔助將鋼瓶推至鋼瓶機器人上,并通過控制面板發出夾緊指令,然后機械臂上左、右小油缸運動驅動機構夾住鋼瓶,這時工作人員再在控制臺上選擇鋼瓶放置貨架,用條形碼打印機打印條形碼,再將條形碼貼在鋼瓶上。條形碼內錄有入庫時間、入庫貨架等信息。
完成上述工作后,工作人員在控制臺上發出入庫信號,搬運機器人沿預先設定路線行駛到指定貨架前(從卸貨點到任一貨架的路徑均為預先設置的路徑),在到達指定貨架后,控制器發出指令,機械臂先上升到一定距離后控制器發送指令給AGV,AGV接收到指令后再向前運動一定的距離(在貨架前設置有兩個AGV停止定位點),AGV到達第二停止定位點后反饋信息給控制器,控制器接收到反饋信息后,機械臂松開,升降架再緩慢下降,將鋼瓶放置在貨架上,然后AGV退回第一停止定位點,完成放貨,搬運機器人原地等待10 s,確定無新指令后返回倉庫門口,原地等待20 s,確定無新指令后返回充電站充電。
3.3 鋼瓶取出過程
工作人員通過簡易呼叫器將搬運鋼瓶機器人呼叫到倉庫門口,并在控制面板上選擇需要的鋼瓶,搬運機器人沿預定路徑到達指定貨架前的第一停止定位點,到達第一停止定位點后反饋信息給控制器,升降架上升到指定位置,控制器發送信息給AGV,AGV向前運動到第二停止定位點而后反饋信息給控制器,然后機械臂緩緩上升,夾緊油缸驅動機構夾緊鋼瓶,上升到一定距離后控制器發送信息給AGV,AGV向后運動到第一停止定位點,在搬運機器人完成上述流程后沿設定路徑前往指定卸貨點,在到達卸貨點后,工作人員通過控制面板轉換為手動操作模式,人工遙控叉架升到指定高度,再發出卸貨指令,機械臂松開將鋼瓶放置在運貨車上,完成取出過程。
4 應用
國網湖北省電力公司六氟化硫氣體回收處理中心承擔著國網湖北省電力公司系統內部SF6氣體日常廢氣凈化處理、再生氣配發、設備維修及維護等工作,高峰時段日處理氣體500 kg以上。在使用機器人之前,SF6氣體鋼瓶的上下車、出入庫、氣體回收處理等工作處于人工搬運、操作以及人工統計記錄的人力工作階段,每次搬運鋼瓶或者對鋼瓶氣體進行處理至少需要2名工人;高強度的鋼瓶搬運,不僅使得運輸工人疲憊不堪,也增加了企業、員工的安全風險。
在使用鋼瓶搬運機器人之后,不但節省了人力,保障了人身安全,實現了SF6氣體鋼瓶倉儲的無人化作業,而且做到了資料、檔案管理電子化,做到舊氣入庫、氣體再生、鋼瓶維護管理、氣體灌裝、氣體檢測、氣體出入庫的全過程閉環管理,規范了制氣工藝及檢測方法。在工藝改進前共制氣45瓶,合格18瓶,不合格27瓶,合格率為40%;工藝改進后制氣23瓶,合格19瓶,不合格4瓶,合格率有效提高到82.6%以上。
5 結語
搬運鋼瓶機器人是在通用AGV基礎上開發的產品,將AGV小車的結構與機械臂的結構相互融合,使二者結構件相互補充,符合國內外現階段科技發展潮流,結構簡單,安全可靠,易于使用,經濟性好,利于推廣。通過在處理中心的使用可有效解決人員的安全保障問題,同時可有效減輕人工作業量,減少人力資源消耗。
(References)
[1] 楊師斌.六氟化硫氣體的危害與預防[J].重慶工商大學學報:自然科學版,2009,26(1):22-26.YANG Shibin.The harm and prevention of sulfur hexafluoride gas[J].Journal of Chongqing Technology and Business University:Natural Science Edition,2009,26(1):22-26.
[2] 袁平,戈洋.六氟化硫氣體全面質量監督管理系統軟件設計[J]. 湖北電力,2000,24(3):53-54.YUAN Ping,GE Yang.Design discussion of SF6gas quality supervision management software[J].Hubei Electric Power,2000,24(3):53-54.
[3] 吳雄喜.AGV自主導引機器人應用現狀及發展趨勢[J].機器人技術與應用,2012(3):16-17.WU Xiongxi.Application status and development trend of AGV autonomous guidance robot[J].Robotic Technology&Applications,2012(3):16-17.
[4] 馮瑋,陳明.射頻識別技術在車輛智能化管理系統中的應用[J].供用電,2010,27(6):88-90.FENG Wei,CHEN Ming.Applicationofradiofrequency identification in the intelligent vehicle management system[J].Power Supply and Use of Electricity,2010,27(6):88-90.
[5] 董平,趙海伶.AGV及AGVS方案研究[J].組合機床與自動化加工技術,2002(2):21-24.DONG Ping,ZHAO Hailing.Study on AGV and AGVS scheme[J].Combined Machine Tool and Automation Processing Technology,2002(2):21-24.
[6] 田朋云,董增文,胡利,等.基于物聯網射頻技術的倉管機器人設計與實現[J].內蒙古科技大學學報,2015,34(4):337-340.TIAN Pengyun,DONG Zengwen,HU Li,et al.Design and implementation of the warehouse robot based on IOT radio frequency technology[J].Journal of Inner Mongolia University of Science and Technology,2015,34(4):337-340.
[7] 李梅娟,陳雪波,劉臣奇.自動化立體倉庫存取設備優化調度方法研究[J].計算機工程與設計,2006,27(2):181-183.LI Meijuan,CHEN Xuebo,LIU Chenqi.Research of optimal scheduling approach on automatic houseware storage/retrievalvehicles[J].ComputerEngineering and Design,2006,27(2):181-183.
The Development of Handling Robot for Sulfur Hexafluoride Treatment Center
YAO Jingsong1,LIN Lei1,CHEN Dong2,LIU Xiaofang1,YANG Xu1
(1.State Grid Hubei Electric Power Company Maintenance Company,Wuhan Hubei 430050,China;2.Wuhan University,Wuhan Hubei 430072,China)
Aiming at the demand of sulfur hexafluoride recovery and treatment center in State Grid Hubei Electric Power Company,a kind of robot for handling cylinder is designed and developed.The structure and design method of the robot are introduced,the layout of the warehouse is planned,and the control requirements and implementation methods of the robot are analyzed in detail.Due to the use of robot,the warehouse unmanned is basically achieved,which meets the requirements of intelligent management and unmanned operation of sulfur hexafluoride gas cylinder storage.Handling robot is developed on the basis of AGV,which has high practicality,security and good economy,and is easy to promote to use.
sulfur hexafluoride warehouse;handling robot;development
TP242.3
A
1006-3986(2017)05-0047-04
10.19308/j.hep.2017.05.011
2017-04-08
姚京松(1975),男,湖北武漢人,學士,高級工程師。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
