基于UG與Adams對高度可調式甘蔗運輸機的設計與仿真
2017-12-16 09:15:41盧煜海李昊達馬彥杰
農機化研究 2017年5期
關鍵詞:設計
盧煜海,孟 強,畢 偉,李昊達,馬彥杰
(廣西大學 機械工程學院,南寧 530004)
?
基于UG與Adams對高度可調式甘蔗運輸機的設計與仿真
盧煜海,孟 強,畢 偉,李昊達,馬彥杰
(廣西大學 機械工程學院,南寧 530004)
對于甘蔗在運輸上車目前均為人工作業,并應對運輸汽車的車廂底板高度不一的問題,提出一種甘蔗運輸機用于實現甘蔗運輸車的半機械、半人力作業。通過虛擬樣機Adams動態仿真,以及運用MatLab對仿真結果進行分析的方法,對甘蔗運輸機工作可行性進行分析,結果表明,甘蔗運輸機可以滿足農民對甘蔗運輸上車的要求。
高度可變;甘蔗;運輸上車;仿真;Adams
0 引言
目前,農民在甘蔗運輸上車作業均為人工,不僅耗費了不必要的人力,增加了運輸的成本,而且也加大了工作農民的勞動強度,易引發各種并發癥,影響勞動工人的生活質量。由于汽車噸位不一而導致的運輸高度不一,難以實現良好的、可靠的機械工作性能,也是亟需解決的問題。
針對上述兩個問題,本文設計了高度可調式甘蔗運輸機,用于實現甘蔗運輸上車的半機械、半人力操作,以減少人工的數量及工作強度,并良好地應對運輸汽車的車廂底板高度不一的問題。但是,盲目的依靠經驗和技巧對機械進行設計與制造,必定會造成不必要的材料和時間的損失。為此,本文運用UG三維造型進行結構設計與分析,并運用虛擬樣機Adams進行動態仿真并運用MatLab對仿真結果進行分析,設計出可靠運行的高度可調式甘蔗運輸機。
1 結構與工作原理
1.1 結構
高度可調式甘蔗運輸機由4部分主成,分別為機架部分、動力傳輸部分、運輸部分及高度調節部分。其三維造型圖紙如圖1所示。
1.2 高度可調式甘蔗運輸機工作原理分析
高度可調式甘蔗運輸機由電動機提供動力,通過變數器進行速度與扭矩的調節;然后,通過鏈系結構,將動力傳輸到運輸架上;最后,由運輸架帶動甘蔗運動,實現甘蔗的運輸上車。
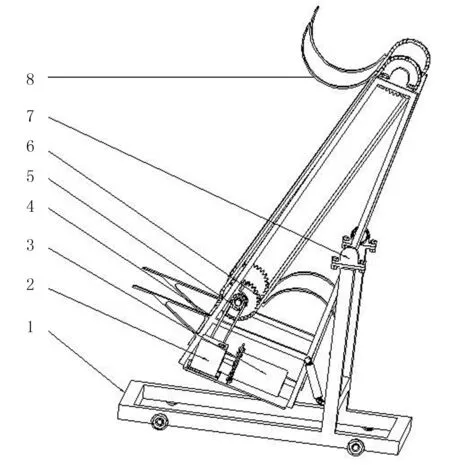
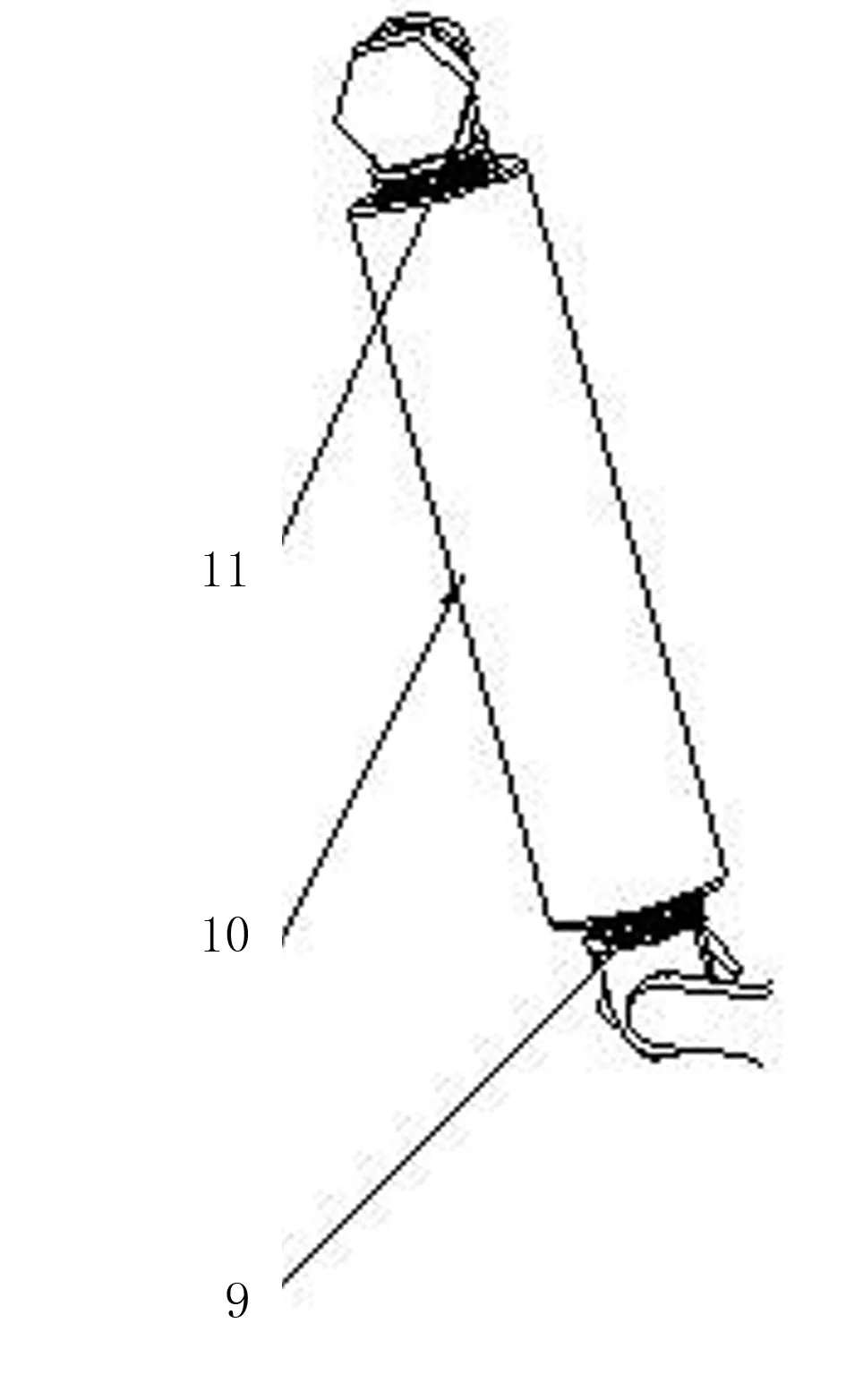
1.底座機架 2.變速箱 3.電動機 4.運輸支架 5.鏈條 6.鏈輪 7.支撐軸承 8.運輸架 9、10.調劑絲杠 11.調節套筒
在設計過程中,考慮到各種運輸汽車的車廂底板的高度不一致及甘蔗運輸上車過程的摔傷問題,設計了由絲杠和調節套筒組成的高度調節裝置。該裝置由兩個反向的螺紋副組成,通過旋轉調節套筒,使得調節絲桿從調節套筒內伸出或縮進,以達到調節高度的目的。
2 高度可調式甘蔗運輸機動態仿真
將UG三維造型完成的模型導入到Adams虛擬樣機中,進行動態仿真,目的在于是否存在機械運動過程的零件干涉問題,并得出高度可調式甘蔗運輸機兩種極限位置的運輸架運動軌跡及甘蔗的運輸軌跡的相關數據,為高度可調式甘蔗運輸機的工作性能分析做鋪墊。
Adams虛擬樣機仿真結果表明:該機結構可行,并得到相關數據。以運輸最高點為例,此時運輸支架為垂直狀態,其仿真模型如圖2所示。對于運輸最低點,只需改變運輸支架與地面法線的角度至30°即可。
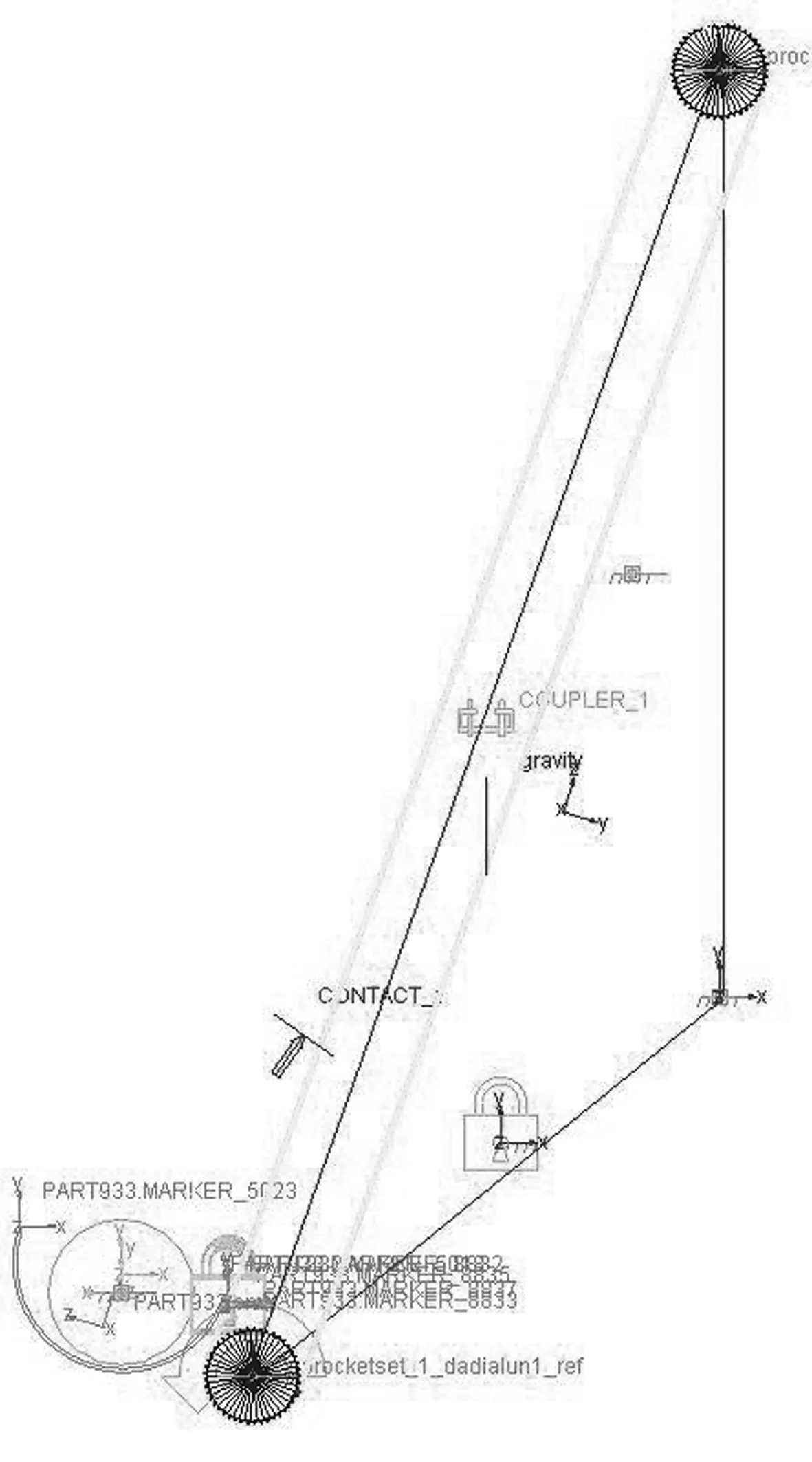
圖2 高度可調式甘蔗運輸機仿真圖
2.1 高度可調式甘蔗運輸機位于高度最低時
經過動態仿真后,對于甘蔗及運輸架,得到其運動過程中運動軌跡的X、Y隨時間變化曲線及甘蔗與運輸架接觸點力在X、Y上的力隨時間的變化的曲線,如圖3~圖8所示。

圖3 甘蔗運動軌跡X坐標圖
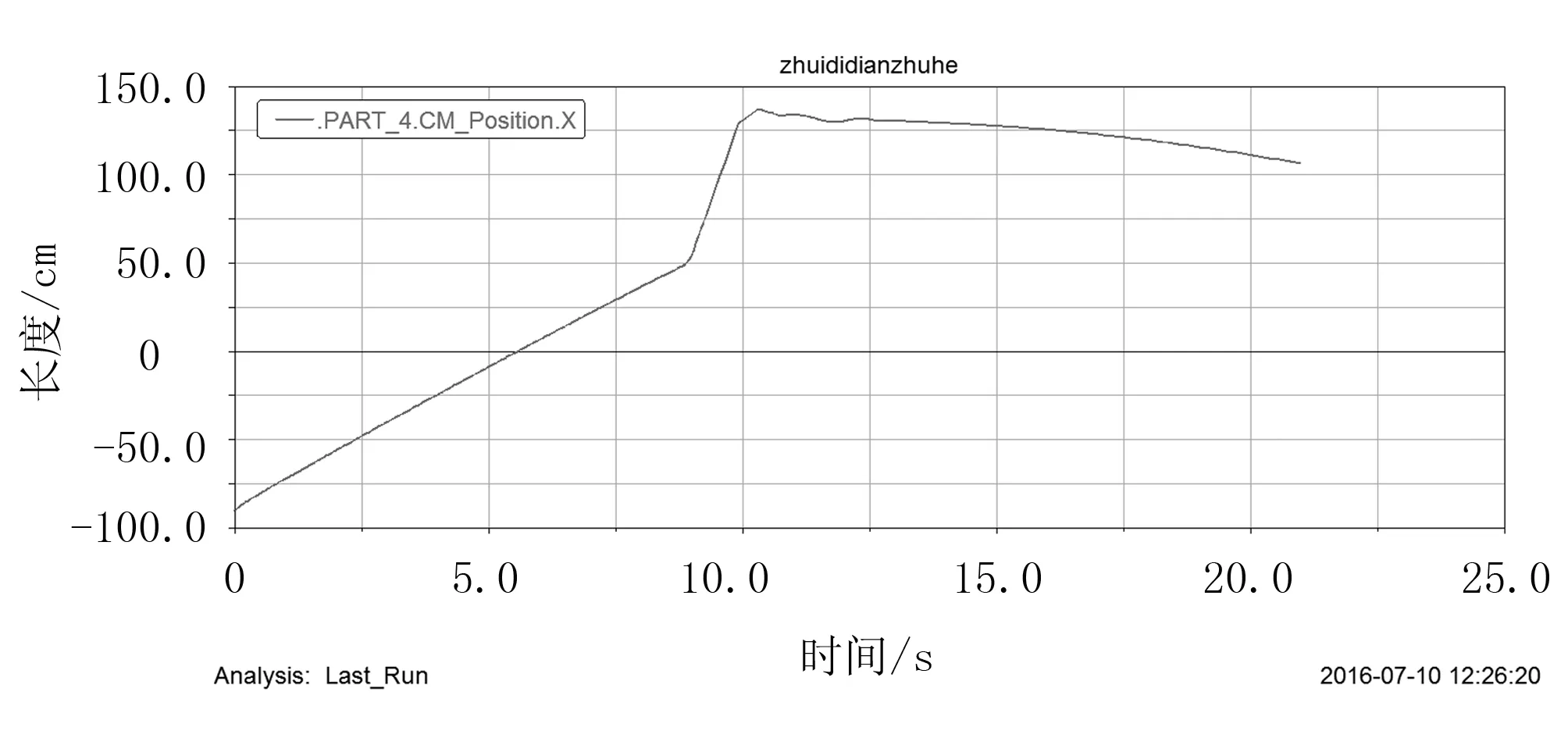
圖4 甘蔗運動軌跡Y坐標圖
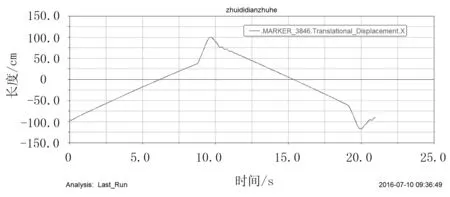
圖5 運輸架運動軌跡X坐標圖
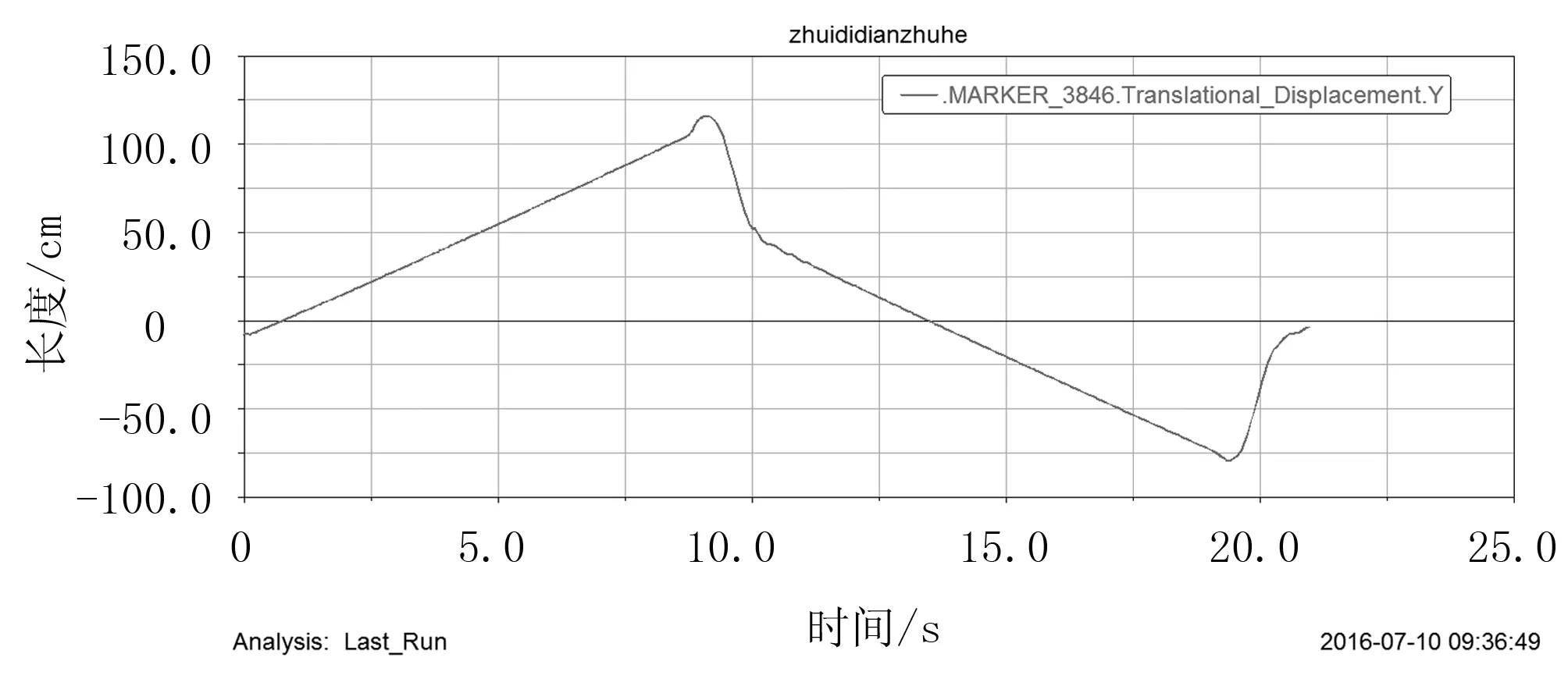
圖6 運輸架運動軌跡Y坐標圖
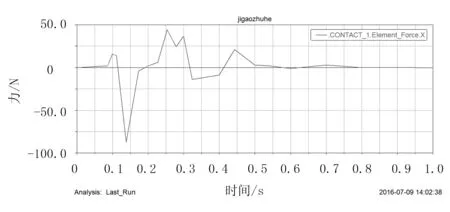
圖7 甘蔗與運輸架接觸點力X方向圖
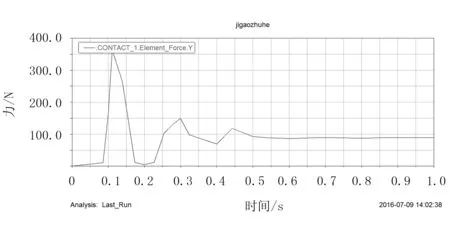
圖8 甘蔗與運輸架接觸點力Y方向圖
2.2 高度可調式甘蔗運輸機位于高度最高時
經過動態仿真后,對于甘蔗以及運輸架,得到其運動過程中運動軌跡的X、Y隨時間變化曲線以及甘蔗與運輸架接觸點在X、Y方向的力隨時間變化的曲線,如圖9~圖14所示。
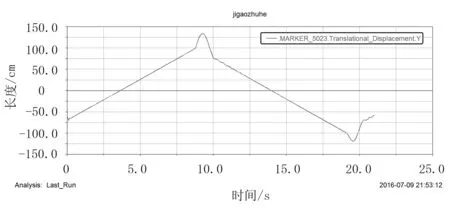
圖9 甘蔗運動軌跡X坐標圖
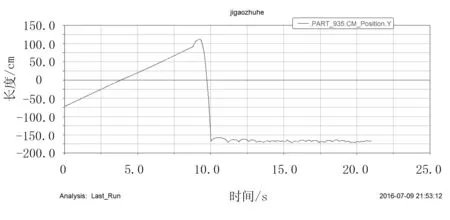
圖10 甘蔗運動軌跡Y坐標圖
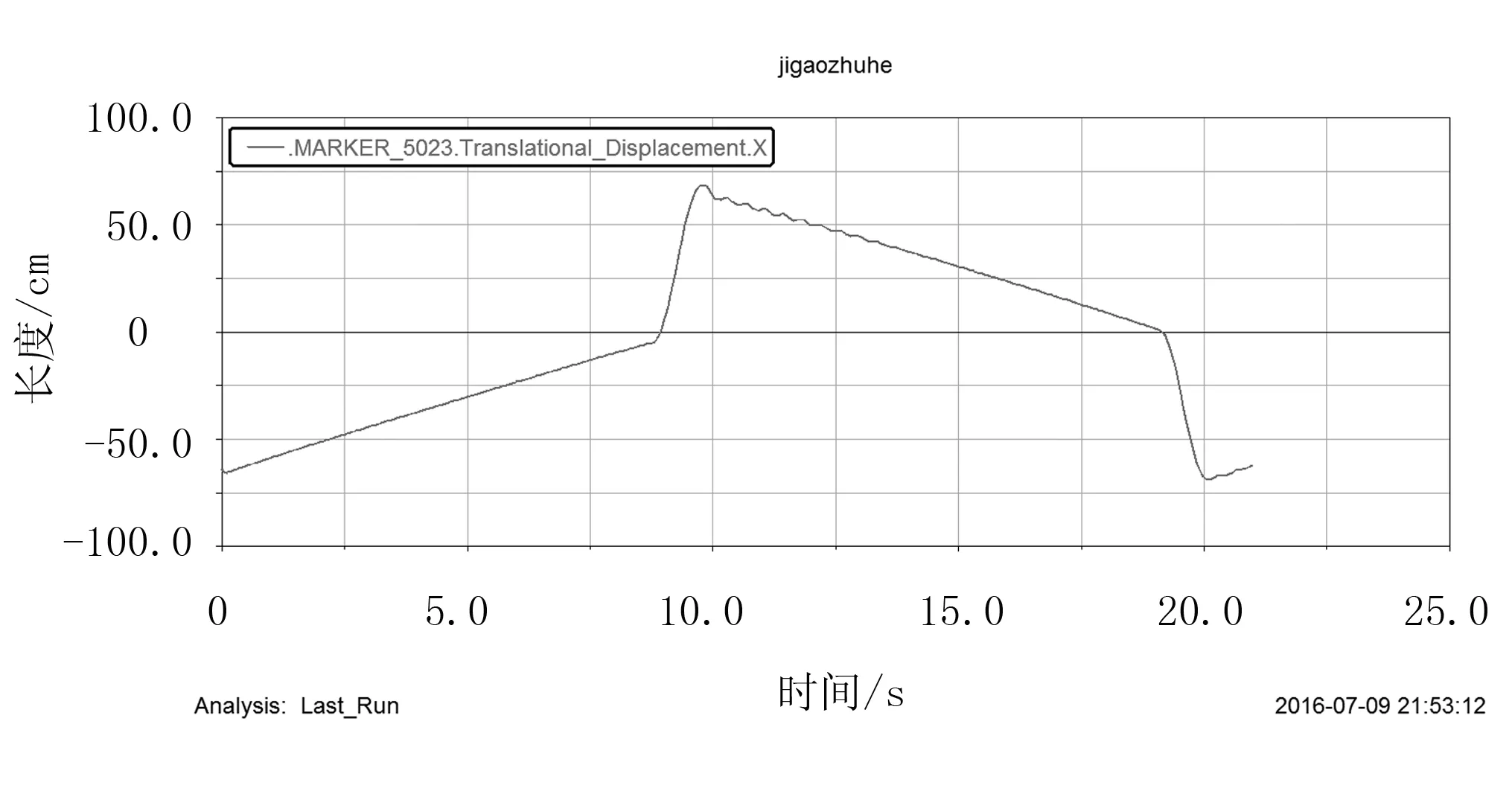
圖11 運輸架運動軌跡Y坐標圖
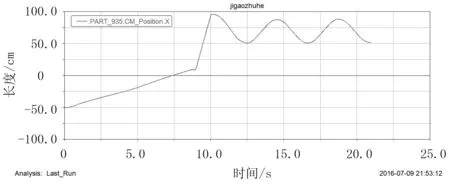
圖12 運輸架運動軌跡X坐標圖
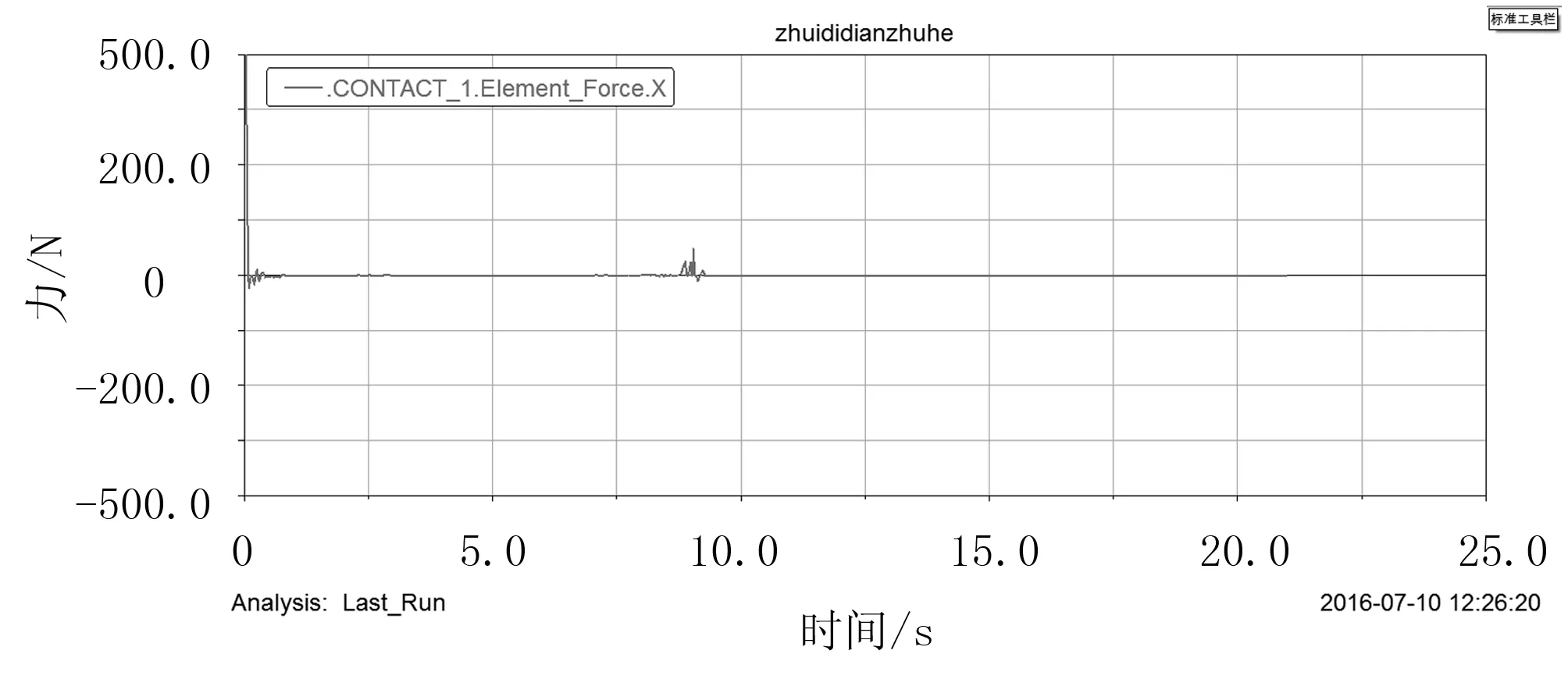
圖13 甘蔗與運輸架接觸點力X方向圖
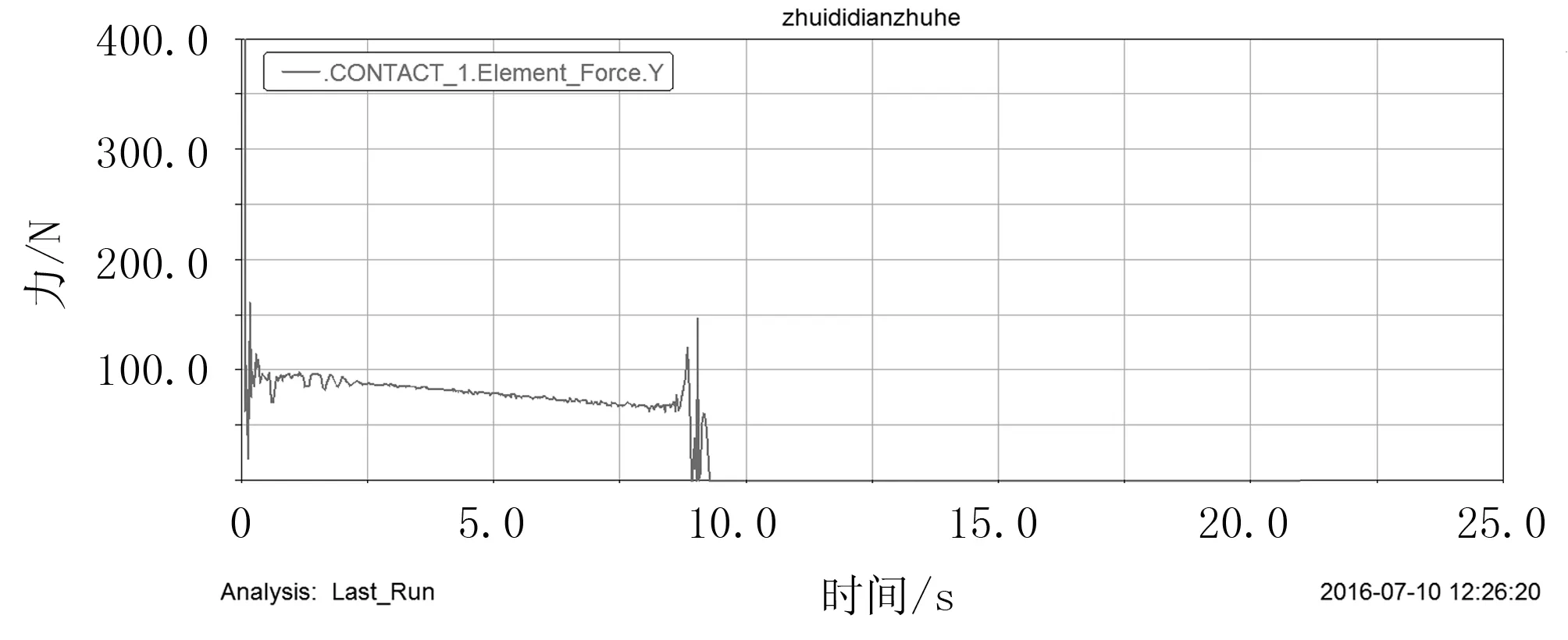
圖14 甘蔗與運輸架接觸點力Y方向圖
3 甘蔗運輸架仿真結果分析
經過以上仿真可知:高度可調式甘蔗運輸機運動穩定可靠性。以下將通過MatLab對仿真得到的相關軌跡進行分析,以便分析高度可調式甘蔗運輸機工作性能的可靠性。將Adams圖標數據導入MatLab,并進行編程處理,可得到高度可調式甘蔗運輸機的工作有效范圍圖,如圖15所示。
由圖15可知:其各曲線交點以下的甘蔗軌跡曲線,即為運輸汽車車廂底板所在位置,可根據汽車車廂底板高度的不同而選取不同的底板與甘蔗運動軌跡的交點;如地理位置所造成的高度變化超出單條軌跡可調節范圍時,可調節高度調節器。由圖15可知:A,B 高度極限差值為8cm,以0.4的比例進行還原可知,可變極限高度為20cm,最低交點到地面的高度設計為1.3m。由此可知,整體高度可調式甘蔗運輸機可運甘蔗高度范圍為1.3~1.5m。由于一般運輸汽車車廂底板高度為1~1.3m,可知高度可調式甘蔗運輸機工作可靠性良好。
4 實驗及其效率測試
經過嚴格設計參數的確定,試制了1臺高度可變式甘蔗運輸機,并對其的運輸能力及其運輸效率進行了測定。可變式甘蔗運輸機的實物拍攝圖,如圖16所示。
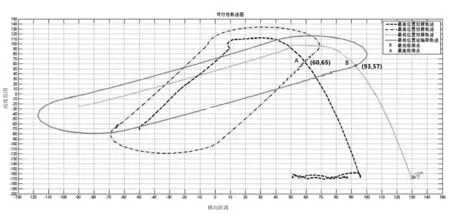
-·-:最高位置時運輸架運動軌跡 - - -:最高位置時甘蔗運動軌跡

圖16 實物圖
其相應試驗數據如表1所示。
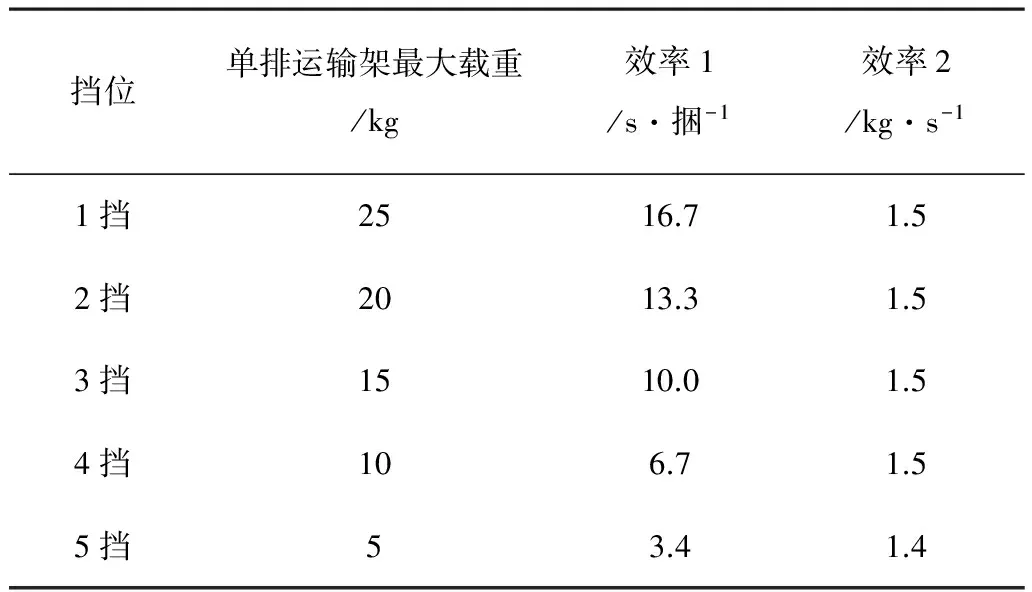
表1 效率測試表
由表1可知:單次總最大載量為50kg,最大輸出效率為1.5kg/s。
試驗表明:最大裝運效率,可達到5.4t/h,就應對現行的農場生產和裝載效率來說,是可以達到所需的裝載目標。同時,應對大型農場,可根據生產需要,改變其電動機規格和相應的傳動系的結構參數,就可達到更高的生產效率與之相適應。
5 結論
該高度可調式甘蔗運輸機可實行甘蔗運輸上車的半機械、半人力操作,減少的數量及工作強度,其工作高度范圍為1.3~1.5m,具有良好對地面高度不等以及車廂底板高度不等的適應性,以及可靠的工作性能、就小型的高度可變式甘蔗運輸機來說,最大裝運效率來可達到5.4t/h,可良好地滿足現行的裝載效率。
[1] 張俊峰,李敬亞,張衍林,等.山地果園遙控單軌運輸機設計[J].農業機械學報,2012(2):90-95.
[2] 吳偉斌,趙奔,朱余清,等.丘陵山地果園運輸機的研究進展[J].華中農業大學學報,2013(4):135-142.
[3] 歐陽玉,洪添勝,焦富,等.山地果園拆裝單向牽引式雙軌運輸機的設計[J].華中農業大學學報,2015(1):128-135.
[4] 吳偉斌,廖勁威,洪添勝,等.山地果園輪式運輸機車架結構分析與優化[J].農業工程學報,2016(11):39-47.
[5] 龔志遠,李軼凡,劉燕德,等.山地果園軌道運輸機的研究及其應用進展[J].食品與機械,2016(1):202-206.
[6] 李敬亞.山地果園單軌運輸機的研制[D].武漢:華中農業大學,2011.
[7] 孔德新.上山20°傾角混凝土皮帶運輸機設計與應用[C]//河南省科學技術協會.科技、工程與經濟社會協調發展—河南省第四屆青年學術年會論文集(上冊),河南省科學技術協會,2004.
Based on UG and Adams Simulation and Analysis of the Sugarcane Conveyor
Lu Yuhai, Meng Qiang, Bi Wei, Li Haoda, Ma Yanjie
(College of Mechanical Engineering, Guangxi University, Nanning 530004 , China)
For sugar cane and transportation are all artificial current problems, and to cope with the transportation vehicle platform floor height of the different problems, put forward in this paper a kind of sugar cane conveyor machine used to implement the sugar cane transport on machinery and manpower, and through the virtual prototype, Adams dynamic simulation and the method of using matleb analysis of simulation results, the feasibility analysis for sugarcane transport work.And from this article's final result, sugarcane conveyor can farmers on sugar cane transport on request.
height adjuutable; sugar cane; get in the car; transportation simulation
2016-07-18
廣西制造系統與先進制造技術重點實驗室項目(1305109S03);廣西大學國家級大學生創新創業訓練計劃項目(201410593052)
盧煜海(1970-),女,廣西桂平人,講師,(E-mail)lyuhai@163.com。
S229+.1
A
1003-188X(2017)05-0052-05
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
