彈齒滾筒式撿拾裝置彈齒的靜力學分析
2017-12-16 02:48:38郁志宏吳淑紅王文明張建超
農機化研究 2017年4期
郁志宏,吳淑紅,王文明,張建超
(1.內蒙古農業大學 機電工程學院,呼和浩特 010018;2.邢臺職業技術學院 機電工程系,河北 邢臺 054035)
?
彈齒滾筒式撿拾裝置彈齒的靜力學分析
郁志宏1,吳淑紅1,王文明2,張建超1
(1.內蒙古農業大學 機電工程學院,呼和浩特 010018;2.邢臺職業技術學院 機電工程系,河北 邢臺 054035)
針對彈齒滾筒式撿拾裝置在工作過程中彈齒變形現象,對彈齒滾筒式撿拾裝置彈齒進行靜力學分析,以尋求解決的途徑。通過對撿拾裝置彈齒在3個工作階段上的載荷進行分析后,獲得各工作階段彈齒的受力簡圖,通過比較判斷出在撿拾升運階段彈齒受力比較復雜。以9KJ-1.4A型壓捆機撿拾裝置為實例,經過計算在有隨機載荷和無隨機載荷時彈齒齒臂末端的應力情況,得出結論:在沒有隨機載荷的情況下,齒根處應力遠小于其許用應力,彈齒產生彈性變形,有足夠的強度;當有隨機載荷時,對彈齒產生沖擊,若隨機載荷過大,垂直于彈齒軸向的分力大于24N,則彈齒會產生塑性變形。對撿拾裝置進行靜力分析,可為撿拾裝置整體結構優化設計供理論依據。
撿拾裝置;彈齒;壓捆機;靜力分析
0 引言
彈齒滾筒式撿拾裝置相對于偏心式撿拾裝置,因其使用彈性齒,可以近距離地撿拾地面上的作物;彈齒的運動軌跡由凸輪滑道控制,可以實現預想的復雜運動,且彈齒和滾筒保護罩之間不存在運動副,彈齒在此處不受力;彈齒和保護罩之間有比較大的間隙,當彈齒碰到石塊,受到沖擊力產生小的變形后也能縮回到保護罩內,不至于引起撿拾裝置停止工作[1]。所以,彈齒滾筒式撿拾裝置普遍應用于農作物收獲機械,尤其是打捆機。
我國現使用的打捆機多數是進口國外機械或在進口機械的基礎上進行改進研制的,沒有完整的設計理論[2]。很多學者對撿拾裝置工作參數及運動過程進行了大量研究,僅有少數學者對彈齒的受力情況進行研究[3-7],而針對撿拾裝置在撿拾牧草過程中的受力情況進行研究的文獻則更少。
彈齒上的載荷是撿拾裝置設計的重要依據,在進行零件強度和剛度計算時,首先要確定作用在零件上載荷的種類和大小,才能更合理地確定所設計零件的結構與尺寸;另外,載荷也是撿拾器機械系統進行動力計算的重要依據,選擇動力機的類型和容量都要考慮載荷的大小和特性;更進一步,為了提高所設計機械的可靠性,在設計階段預測其可靠度、合理確定其載荷狀態特性極為關鍵。因此,本文對撿拾裝置撿拾牧草的工作過程進行靜力學分析,并將所受各載荷進行參數化表示,為撿拾器的結構設計及參數優化提供力學依據。
1 撿拾裝置的結構及工作原理
圖1為彈齒滾筒式撿拾裝置的結構圖,圖2為彈齒的3D實體圖。撿拾壓捆機工作過程中,機器前進的同時,撿拾裝置中間軸逆前進方向回轉,通過兩側的滾筒盤帶動周向幾個彈齒梁轉動;彈齒梁的一端連接曲柄,帶動滾輪沿凸輪凹槽滾動;彈齒沿軸向固定在彈齒梁上,因此彈齒的運動同時受彈齒梁的圓周旋轉運動和滾輪沿凸輪凹槽運動的控制,既繞中間軸旋轉又繞彈齒梁的軸線擺動。
由于彈齒隨機器一起前進,所以彈齒的運動是擺動、轉動、移動的合成運動[8]。當彈齒運動到撿拾滾筒下方時,其端部從滾筒保護罩的縫隙間伸出,將地面的牧草撿起;隨著中心軸的轉動,彈齒將牧草穩定地提升到撿拾滾筒的上方,并推向傳送帶,同時彈齒垂直縮進滾筒護板內,與牧草脫離。撿拾裝置的一個運動周期需要完成放齒、撿拾、升運、推送和收齒幾個動作。撿拾裝置通過彈齒的一系列運動來完成對牧草的撿拾,并將其輸送到下一個工作部件。
撿拾裝置的工作要求:①應該把留在茬上的所有草料都撿拾干凈;②在撿拾過程中,不要撕破豆科草料最有營養價值的細嫩葉片;③撿拾的物料應無阻礙地輸送到機器的下一個工作部件。
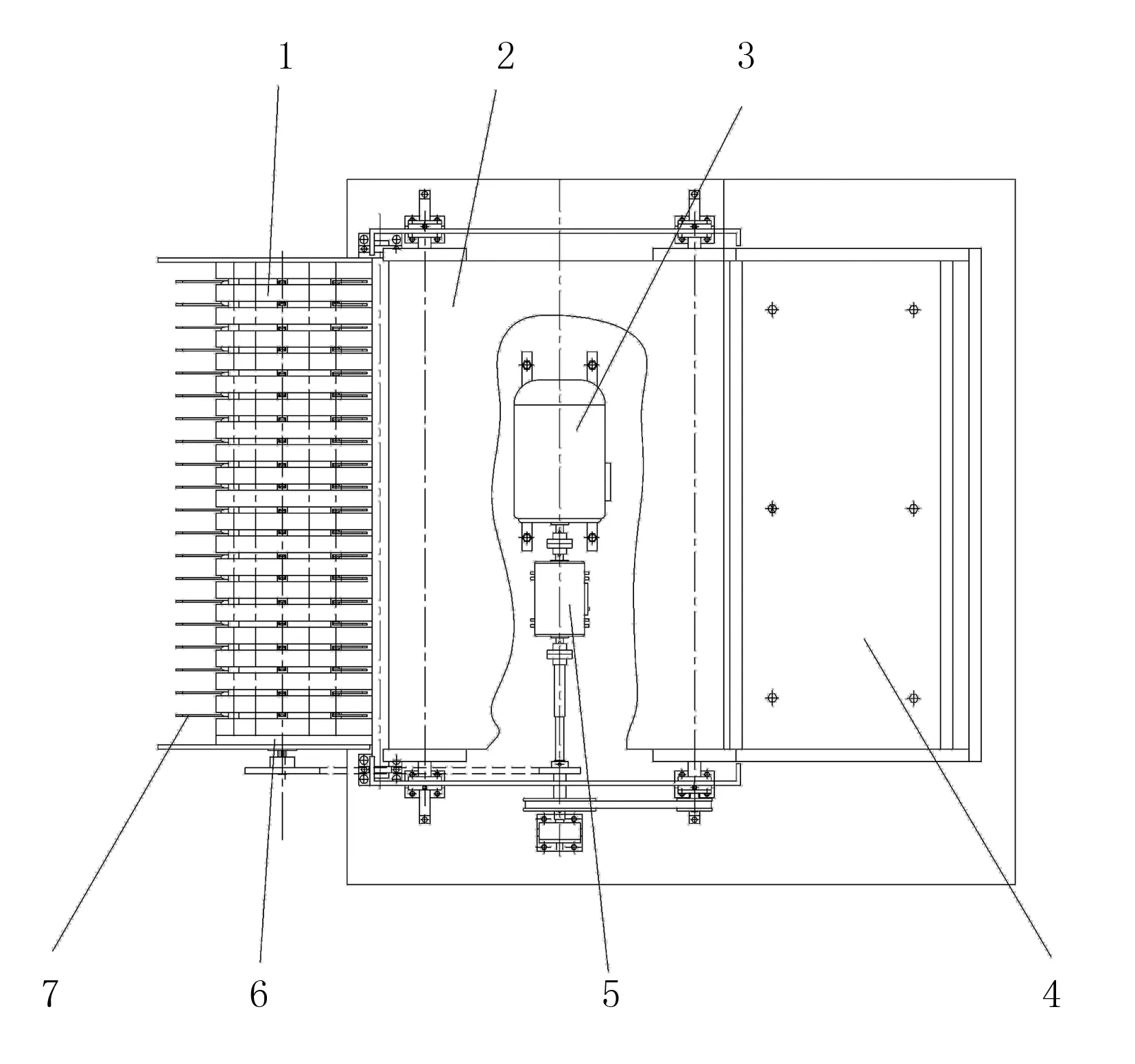
1.滾筒 2.輸送帶 3.電機 4.集草箱 5.JN338型轉速轉矩測量儀 6.彈齒 7.凸輪軌道
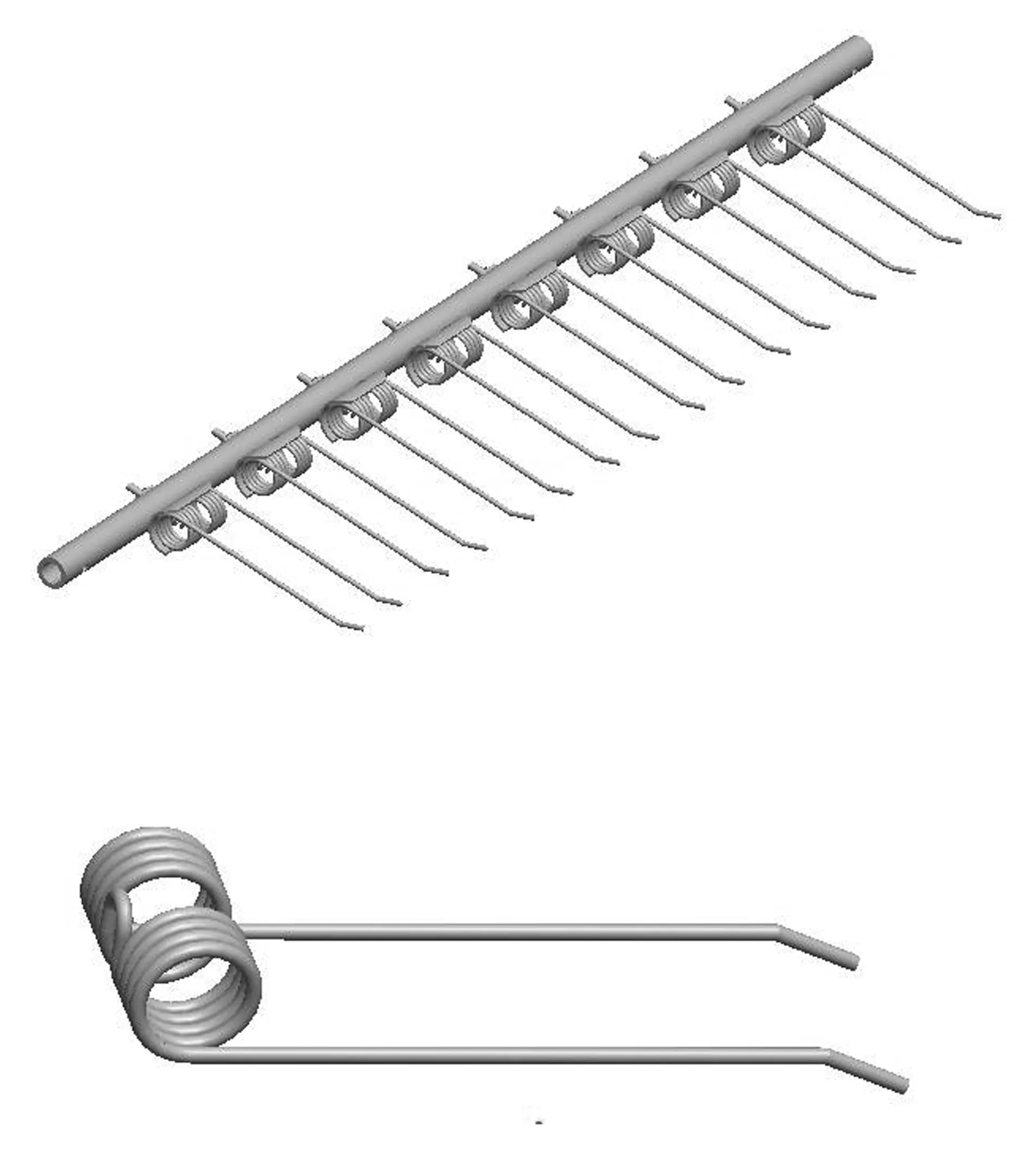
圖2 彈齒3D實體圖
2 工作過程各階段彈齒受力情況
彈齒滾筒式撿拾裝置的一個工作周期分為放齒階段、撿拾升運階段及收齒階段。作用在彈齒上的載荷一般有:①周期載荷,撿拾裝置滾筒回轉1周,撿拾升運牧草時,牧草對彈齒的作用力,包括摩擦力和壓力等;②隨機載荷,彈齒碰到地面石塊時,石塊對彈齒的作用力。彈齒滾筒式撿拾裝置在各工作階段中彈齒所受載荷情況有一定的區別,分析如下。
2.1 放齒階段
隨著中心軸的轉動,彈齒迅速伸出滾筒保護罩,齒端有較大的線速度,此時彈齒還沒有接觸牧草,只受到自身的重力G1,G1由彈齒的材質及體積決定。其力學模型如圖3所示。
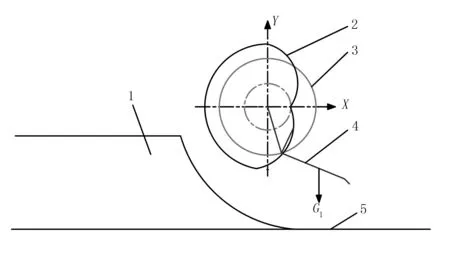
1.草層 2.凸輪滑道 3.滾筒 4.彈齒 5.地面
G1為彈齒齒臂重力,則
G1=ρvg
(1)
式中 ρ—彈齒的密度;
v—彈齒齒臂體積;
g—重力加速度。
2.2 撿拾升運階段
撿拾升運階段前部分彈齒開始接觸牧草,齒端插入草層,隨著中心軸的旋轉,彈齒逐漸將牧草撿起。此時,彈齒既受到自身的重力G1,又受到牧草對其的阻力F1、壓力、摩擦力T及隨機載荷F2的作用。力學模型如圖4所示。
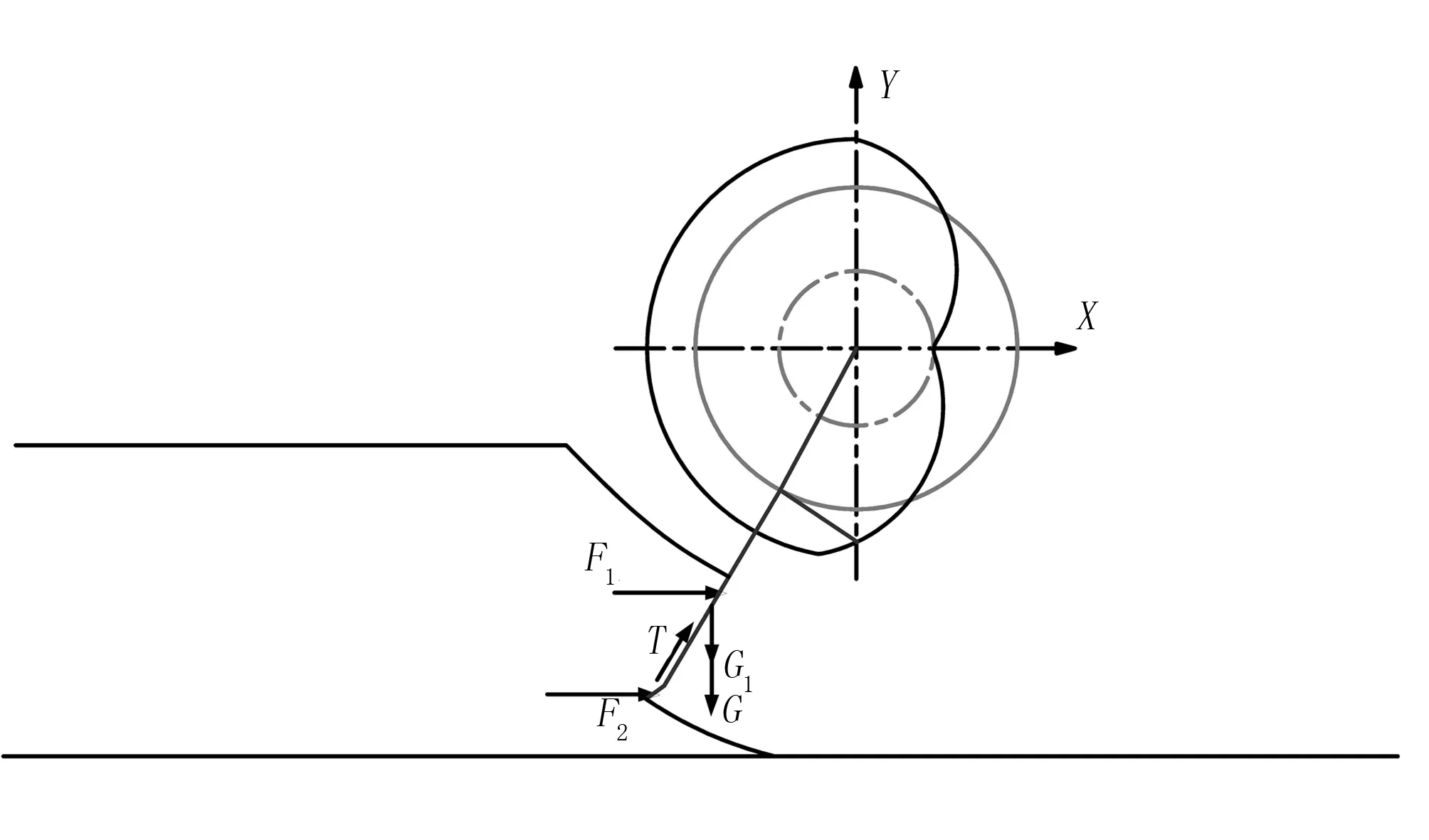
圖4 撿拾牧草時彈齒受力簡圖
其中,G為彈齒撿拾起的牧草的重力,由牧草的含水率、品種、草層密度和所撿拾牧草的體積決定,則
G=mg
(2)
式中 m—彈齒拾起的牧草質量;
g—重力加速度。
F1為牧草對彈齒的阻力。在撿拾階段,彈齒隨著機器有一個前進的速度,彈齒自身繞中心軸旋轉還有一個速度,撿拾牧草時對其有一定的作用力,牧草受力壓縮,對彈齒產生一個反作用力,牧草的特性和牧草與地面間的摩擦會影響阻力的大小;在收齒階段,彈齒推送牧草,由于牧草與撿拾裝置的保護罩之間有滑動摩擦力,所以對彈齒有一定的阻力。
T為牧草與彈齒間的摩擦力,摩擦力由牧草與彈齒間的摩擦因數和牧草對彈齒的正壓力決定。牧草的含水率、品種及彈齒表面的粗糙程度都會影響摩擦系數的大小[9],需要通過試驗測量,則
(3)
α—彈齒與x軸負向夾角。
F2為隨機載荷,是地上的石塊等對彈齒的阻力。小石塊對彈齒端部只產生沖擊作用,而大石塊對彈齒的影響比較大[10]。一般情況下,大石塊不會出現,一旦出現就會引起撿拾裝置零部件較大的塑性變形,對彈齒的疲勞強度有很大影響。彈齒產生塑性變形會直接影響撿拾裝置,大的變形會使滾筒卡住,嚴重情況甚至會損壞其他工作部件。
一般認為106次循環能包括在惡劣工況下發生的極值載荷,現在最大載荷的確定方法一般都是依據Conover等人提出的概率準則估算出來的,即認為概率106所對應的載荷為最大載荷。設測試對象共有K種典型工況,第i種工況的作業時間為Ti,平均幅值變化率(頻率權)為Fi;在第i種工況下,每個載荷循環中載荷幅值不小于SA的概率為Pi(SA),在合成累計頻次達到106次時,i工況下載荷循環的總頻次為Ki×106,第i種工況經過Ki×106次循環,則其幅值不小于SA的次數為
Ni=Ki·106·Pi(SA)
(4)
Pi=∫SAfi(x)dx
式中 Noi—最小幅值;
Nai—特征參數;
bi—形狀參數。
當合成累計頻次達到106次時,所有K種工況下發生的幅值大于SA的總次數為
很多媽媽認為發燒會燒壞腦子,其實這是誤解,只有腦炎才會對大腦有影響,并且也不是發燒引起的。還有人說幼兒急疹要燒到一定的溫度疹子才會出來,也是誤解,幼兒急疹是自限性疾病,沒有特效藥,用不用藥都是發燒3天左右,對癥治療即可。
(5)
令N(SA)=1,得
(6)
滿足上式的解就是所求的最大幅值SAmax,可以用下降法求解該超越方程。
小石塊對彈齒端部只有沖擊作用,根據相對運動原理,在此可以假設小石塊是運動的,速度為v,沿水平方向撞擊彈齒端部。根據能量守恒定律,在沖擊的過程中,沖擊能量轉化為彈性體的變形能,即轉化為彈齒的變形能。其計算公式為
(7)
式中 δd—變形量;
E—彈齒材料的彈性模量;
I—慣性矩;
l—彈齒長度;
m—石塊的質量;
ξ—石塊在土壤中運動的阻力系數;
v—彈齒齒端線速度。
由式(7)可知:彈齒所受到沖擊載荷的大小主要由彈齒齒端的線速度及所碰到石塊的計算質量決定。
撿拾升運階段后,部分彈齒齒端的線速度及彈齒擺角基本保持不變,這樣才能平穩地將牧草升運至滾筒上方。此時,彈齒受到自身的重力G1、牧草對其的壓力及和牧草間的摩擦力T的作用,力學模型如圖5所示。
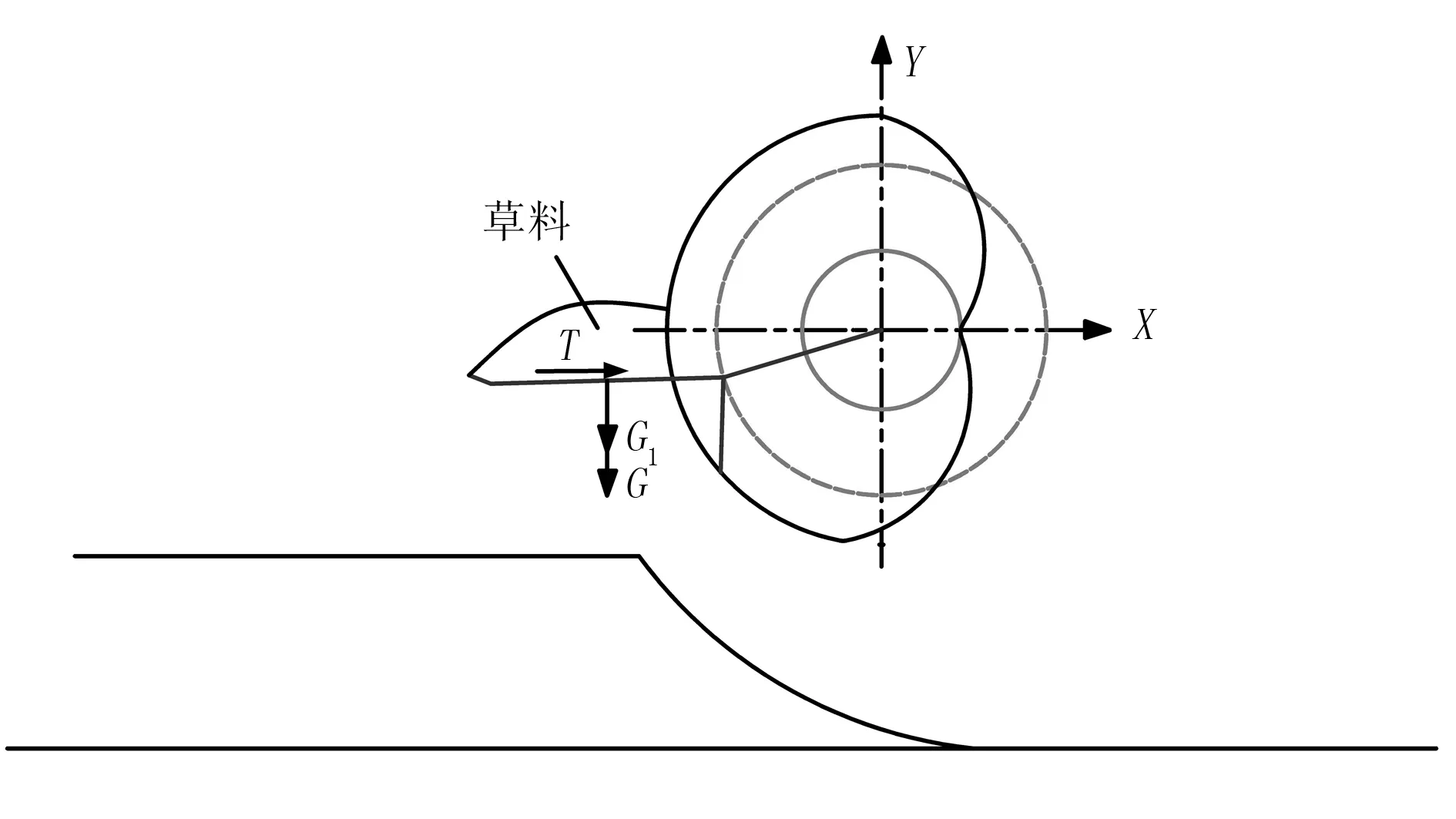
圖5 升運牧草時彈齒受力簡圖
2.3 收齒階段
收齒階段彈齒將牧草推送至下一工作部件,并迅速縮進護板內。此時,彈齒齒端在豎直方向有較大速度,水平方向速度接近零,彈齒受到自身重力G1和推送牧草時牧草對其的阻力F1的作用,力學模型如圖6所示。
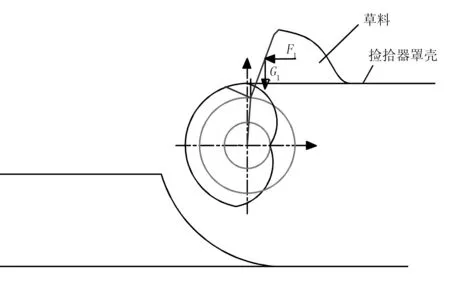
圖6 收齒階段彈齒受力簡圖
3 彈齒的強度校核
觀察以上撿拾器的3個工作階段,在撿拾升運階段,彈齒受到的外力值比較大,對彈齒的影響較大,所以選取此階段對彈齒進行強度校核。以9KJ-1.4A型壓捆機撿拾裝置為例,對其彈齒進行分析,彈齒參數如表1所示。

表1 彈齒參數

直徑d/mm 齒臂長l/mm 彈簧中徑D/mm 5 195 31
彈齒材料為各向同性[11]。
1)強度校核。判斷構件是否具有足夠的靜態強度的檢驗條件為
σmax≤[σ]
(8)
[σ]≤σs/n
其中,[σ]是材料的許用應力;σmax是實際計算出的最大應力;n是材料的安全系數,取n=1.5(n=1.2~2.5)。
經查65Mn的屈服極限應力為785MPa,得[σ]=785/2=523.33MPa。
2)升運階段載荷條件。機器的工作參數:滾筒轉速ω=60r/min,機器前進速度vt=3.5km/h。
在升運階段,當彈齒處于水平位置時受力最大,此時垂直方向受到牧草的壓力及自身重力為
G1=ρvg≈0.29N
Fy=G+G1=0.69N
(9)
其中,G為單個彈齒上的牧草的重力,實驗所用牧草為含水率15%的紫花苜蓿。將質量為6kg的紫花苜蓿鋪成草條,滾筒旋轉2.5圈能將其撿拾干凈,撿拾裝置周向均布5排彈齒,每排均布10組彈齒,G為平均值。
Fy在齒根產生的彎矩為
Mz=Fy×0.15=0.07N·m
齒根的彎曲應力為
σ1=Mz/Wz=5.7MPa
Fy在齒根產生的彎矩即為彈簧所受扭矩,所以彈簧絲中的彎曲應力為
(10)
式中 K1—應力集中系數。
由于此階段彈簧的彎曲應力遠小于材料的許用應力,彈齒產生彈性變形[12],具有足夠的強度。
3)撿拾階段載荷條件。撿拾階段,當彈齒垂直地面時隨機載荷對其作用效果最明顯,假設此時彈齒還未接觸牧草。草場地面石塊大小存在一定差異,假設存在一體積為30cm3的石塊,質量為72g,則
(11)
Fx在齒根產生的彎矩為
Mz=Fx×195=3.12N·m
Fy=G1=0.29N
齒根的彎曲應力為
σ2=Mz/Wz=254.24MPa
彈簧的彎曲應力為
(12)
式中 d—彈齒直徑;
D—彈齒彈簧中徑。
確定許用載荷,則
Mmax≤Wz[σ]
(13)
F≤Wz[σ]/l
F≤34N
彈齒承受的隨機載荷不能超過許用載荷,即
(14)
ξm≤(34/1.2)2×1953×
10-6/(3×196×30.7)=330g
由此得知:當引起沖擊載荷的石塊的計算質量不超過330g時,彈齒將產生彈性變形,離開石塊后,變形恢復,不會和滾筒保護罩發生干涉,不會影響撿拾裝置的正常工作;當石塊的計算質量超過330g時,彈齒將產生塑性變形,變形量不小于17mm。
4 結論
1)彈齒滾筒式撿拾裝置的3個工作階段中,撿拾升運階段受力比較復雜,包括牧草對彈齒的阻力F1、壓力、摩擦力T、彈齒自身的重力G1及隨機載荷。
2)隨機載荷主要由石塊的計算質量及撿拾器的工作參數決定,以65Mn為材料的彈齒,當d=5mm、D=31mm、l=195mm時,齒端能承受的極限載荷為34N,載荷超過34N時彈齒會發生塑性變形。
3)產生沖擊載荷的物體計算質量超過330g時,彈齒將發生塑性變形,變形量不小于17mm。
[1] 郭小軍. 殘膜清理滾筒運動學、動力學、強度及優化研究[D].烏魯木齊:新疆大學,2005.
[2] 王文明,王春光.彈齒滾筒式撿拾裝置的研究與發展[J].農機化研究,2012,34(10):221-225.
[3] 盛凱,曾南宏.彈齒滾筒撿拾器的機構特性及其運動數學模型[J].農業機械學報,1991(1):51-57.
[4] 盧博友,楊青,薛少平,等.圓弧形彈齒滾筒式殘膜撿拾機構設計及撿膜性能分析[J].農業工程學報,2000(6):68-71.
[5] 白圣男,張惠友,楊曉麗,等.彈齒式收膜機的彈齒預選軌跡方程的建立[J].東北農業大學學報,2007(6):832-834.
[6] 丁海泉,郁志宏,劉偉峰,等.彈齒滾筒式撿拾裝置運動學特性的理論分析[J].農機化研究,2015,37(10):76-78,82.
[7] 袁彩云,刁培松,張道林.彈齒滾筒撿拾器的設計與運動仿真[J].農機化研究,2011,33(5):73-76.
[8] 王文明.彈齒滾筒式撿拾裝置參數分析和改進設計研究[D].呼和浩特:內蒙古農業大學,2012.
[9] 余友泰,蔣建鵬.土壤、作物種實和各種脫出物對鋼板、鑄鐵、和木板等的摩擦系數的測定[J]. 東北農學院學報,1957(1):117-127.
[10] 趙海軍.殘膜撿拾滾筒的運動學和動力學研究[D].烏魯木齊:新疆農業大學,2005.
[11] 中國農業機械化科學研究院.農業機械設計手冊:下冊[K].北京:中國農業科學技術出版社,2007.
[12] 曾立平,郭雪娥. 圓柱形扭轉彈簧的可靠性優化設計[J]. 機械設計與制造工程,1999(4):10-11,70.
Static Analysis for Spring-finger of 9KJ-1.4A Forage Baler Pickup Collector
Yu Zhihong1, Wu Shuhong1, Wang Wenming2, Zhang Jianchao1
(1.College of Mechanical and Electrical Engineering,Inner Mongolia Agricultural University,Hohhot 010018 ,China; 2.Institute of Mechanical and Electrical Engineering, Xingtai Polytechnic College, Xingtai 054035, China)
Doing static analysis is necessary for spring-finger cylinder pickup collector. Force diagrams show that the forces of spring-finger on pick up stage are more complex than the other stages. Without random force, the stress of spring-finger root is greatly less than allowable stress according to calculation results and spring-fingers have elastic deformation, they have enough strength; random force has impact to spring-fingers, when the component force perpendicular to spring-finger is greater than 24N, spring-fingers have plastic deformation. Doing the static analysis will provide theoretical basis for structural optimization of spring-finger cylinder pickup collector.
pickup collector; spring-finger; compression binding machine; static analysis
2016-03-23
國家自然科學基金項目(51365035);河北省自然科學基金項目(E2015108021)
郁志宏(1966-),女,河北邢臺人,教授,碩士生導師,(E-mail)yzhyqyzhyq@126.com。
吳淑紅(1992-),女,吉林公主嶺人,碩士研究生,(E-mail)995775147@qq.com。
S817.11+5
A
1003-188X(2017)04-0027-05
