一種新型曲柄五連桿移栽機栽植機構平衡分析
2017-12-16 02:48:40任永飛林蜀云鮑向東
農機化研究 2017年4期
任永飛,李 杰,林蜀云,鮑向東
(貴州省山地農業機械研究所,貴陽 550002)
?
一種新型曲柄五連桿移栽機栽植機構平衡分析
任永飛,李 杰,林蜀云,鮑向東
(貴州省山地農業機械研究所,貴陽 550002)
針對貴州丘陵山地地塊小、坡度大的問題,設計了一種雙曲柄五連桿單鴨嘴栽植機構,并成功應用于2ZBZ-2A型移栽機。首先闡述了2ZBZ-2A型移栽機結構形式及栽植部機構的工作原理,然后再利用質量代換法分析了五連桿機構平衡條件,得出機構平衡公式;并根據l1、l2、l3、l4、l5的原始長度、l2桿質量,計算出l1桿飛輪配重質量矩為3.15kg·mm,l4桿飛輪配重質量矩為6.24kg·mm,栽植臂鴨嘴質量矩為21.4kg·mm,可實現機構運動平衡。最后,采用Adams得出機構栽植點速度、位移仿真曲線,結合驗證性試驗數據,結果表明:該機構具有較強的穩定和適應性,滿足設計要求。
栽植機構;質量代換;雙曲柄;五連桿
0 引言
栽植部結構是蔬菜移栽機的核心部件,其作業時運行的穩定性決定移栽秧苗的質量和效率,栽植機構的大小和質量也會影響移栽機在田間的作業效果及適應性。貴州省屬于典型丘陵山地,由于蔬菜種植坡度大、地塊小,其蔬菜手工種植生產效低、勞動強度大,不能形成規模化種植,經濟效益低下。為此,采用質量代換法設計了一種雙曲柄五連桿單鴨嘴移栽機構,并對機構進行平衡分析。該機構運動更靈活,用于2ZBZ-2A型蔬菜移栽機,能夠更好地適應小地塊、大坡度等地形條件作業。
1 2ZBZ-2A型移栽機簡介
2ZBZ-2A型自走式雙壟移栽機,長、寬、高為2100mm×1200mm×690mm,機型小巧,結構簡單,適用于山區、丘陵、塑料大棚內等小地塊區域的煙草、辣椒、茄子、西紅柿、甜菜等多種帶營養缽體育苗作物的移栽作業。
該機型配套汽油發動機,匹配動力3.68kW,通過變速箱、結合凸輪、離合器分別控制各個部件實現不同運動要求。發動機動力輸出軸經過變速箱帶動主軸,主軸通過鏈傳動帶動驅動輪運動,實現移栽機自走,并可通過改變變速箱檔位以達到不同的行駛速度的目的,具有自動行駛、移栽及橫向投苗等多種實用性功能。
移栽部件通過鏈傳動實現與主軸的同步運行,通過移栽主板上的各個傳動軸傳動,使雙曲柄連桿機構旋轉,從而帶動移栽鴨嘴動作,完成往復圓周運動。這種運動與機器的前進運動相復合,可保證鴨嘴的垂直起落,實現作物的垂直栽植。移栽鴨嘴的開閉由拉線控制,在非移栽作業區,可根據需要調節離合器,控制機器是否進行移栽作業,操作方便。更換不同齒數的栽植傳動機構的調節鏈輪,可以調節作物的栽植距離,實現株距可調,以滿足不同作物的栽植需要。秧苗投放采用橫向投苗裝置,保證作業人員有足夠時間投放秧苗,有效地減少了移栽漏苗率。
2 栽植機構與工作原理
2.1 機構組成
2ZBZ-2A型蔬菜移栽機的栽植部主要由前曲柄、后曲柄、前曲柄飛輪、后曲柄飛輪、前傳動齒輪、后傳動齒輪、連桿、栽植臂、鴨嘴及機架組成,如圖1所示。
2.2 機構工作原理
蔬菜種植對缽苗栽植質量具有直立度要求,要保證栽植缽苗具有理想直立度,需要栽植器的定植點在水平方向上瞬時速度矢量相對地面為零,即“零速投苗原理”[1-4]。本機構是根據零速投苗原理設計,具體工作原理如下:前曲柄、后曲柄與機架上固定軸承相連,汽油發動機通過鏈條傳動驅動雙曲柄同步轉動,從而驅動整個雙曲柄連桿機構旋轉,并帶動連桿、栽植臂及移栽鴨嘴規律動作,完成往復圓周運動。由于前曲柄連接連桿到栽植臂,后曲柄較短,栽植臂可實現兩端搖擺運動,這種運動與機器的前進運動相復合,可保證鴨嘴的垂直起落,實現作物的垂直栽植。鴨嘴的開閉由拉線控制,拉線端與凸輪機構相連接,凸輪旋轉1周,即完成1個投苗動作。
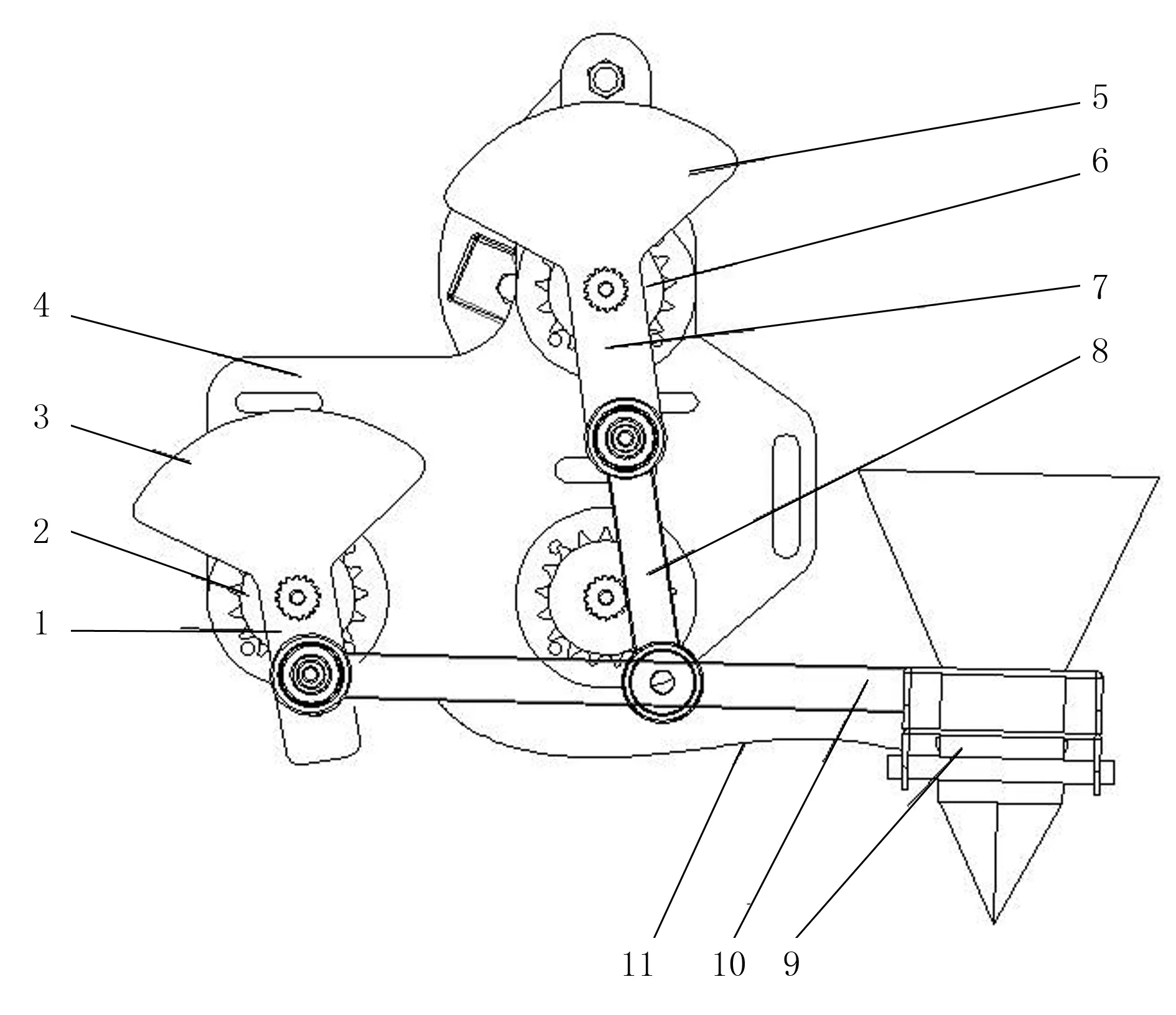
1.后曲柄 2.后傳動齒輪 3.后曲柄飛輪 4.機架 5.前曲柄飛輪 6.前傳動齒輪 7.前曲柄 8.連桿 9.鴨嘴 10.栽植臂 11.拉線
3 機構的平衡理論分析
通過圖1分析,得出圖2所示的運動簡圖。其中,桿l3、l4為曲柄,l5是固定在機架上。蔬菜移栽機栽植過程中,栽植部結構為雙曲柄5桿機構,雙曲柄的轉速、轉角均同步,在分析過程中,將雙曲柄視為單曲柄進行分析。為保證五桿機構在工作過程中完全平衡,則在雙曲柄l2、l4桿(BA延長線、DE延長線)上配重飛輪,在已知l5桿(DC延長線上)安裝鴨嘴。本文利用質量代換法[5-7]列出質心守恒方程式,算出l1、l4桿上飛輪配重質量矩及l3桿上鴨嘴的質量矩。
設機構總質心所在位置為S,則原點S的矢量為
(1)

(2)
將式(2)帶入式(1),得
m2l1)eiφ1+m2r2eiθ2eiφ2+m3r3eiθ3eiφ3+
(m4r4eiθ4+m2l4)eiφ4+2m3l5eiθ5]
(3)
其中,eiφ1、eiφ2、eiφ3、eiφ4為與時間有關的矢量。
滿足機構的封閉矢量方程式為
l1eiφ1+l2eiφ2=l3eiφ3+l4eiφ4-l5eiθ5
(4)
將式(4)帶入式(3)消去eiφ2,得
(5)

m1r1eiθ1+m2l1-m2r2l12eiθ2=0
m3r3eiθ3+m2r2l32eiθ2=0
m4r4eiθ4+m2l4+m2r2l42eiθ2=0
(6)
由于桿l1、l2、l3、l4都是直桿件,桿件的質心都在兩鉸鏈連線上,則θ1=θ2=θ3=θ4=0°,可以得到平衡條件為
m1r1=m2l1-m2r2l12
m3r3=m2r2l32
m4r4=m2l4-m2r2l42
(7)

=3.15kg·mm
=21.4kg·mm
=6.24kg·mm
最后,得出飛輪與鴨嘴的質量配置,即l1桿飛輪配重質量矩為3.15kg·mm,l4桿飛輪配重質量矩為6.24kg·mm,栽植臂鴨嘴質量矩為21.4kg·mm。
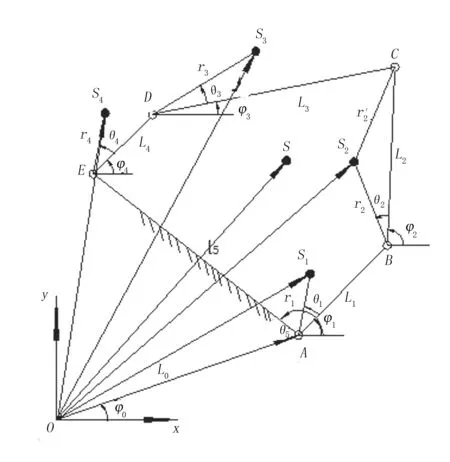
圖2 擺動力完全平衡的線性矢量法
4 陣仿真分析
通過數學模型,計算出l1桿飛輪配重質量矩為3.15kg·mm,l4桿飛輪配重質量矩為6.24kg·mm,栽植臂鴨嘴質量矩為21.4kgmm。在Adams中定義畫出桿件長度、飛輪質量及各桿的質量,進行仿真分析、結論驗證,結果如圖3所示。
根據圖3(b)速度、位移分析曲線,A點為初始點,B、C、D、E點速度為零,此時是栽植點與土壤接觸時刻或投苗時刻,其對應的位移最小。列出A、B、C、D、E點的時間表進行分析,如表1所示。
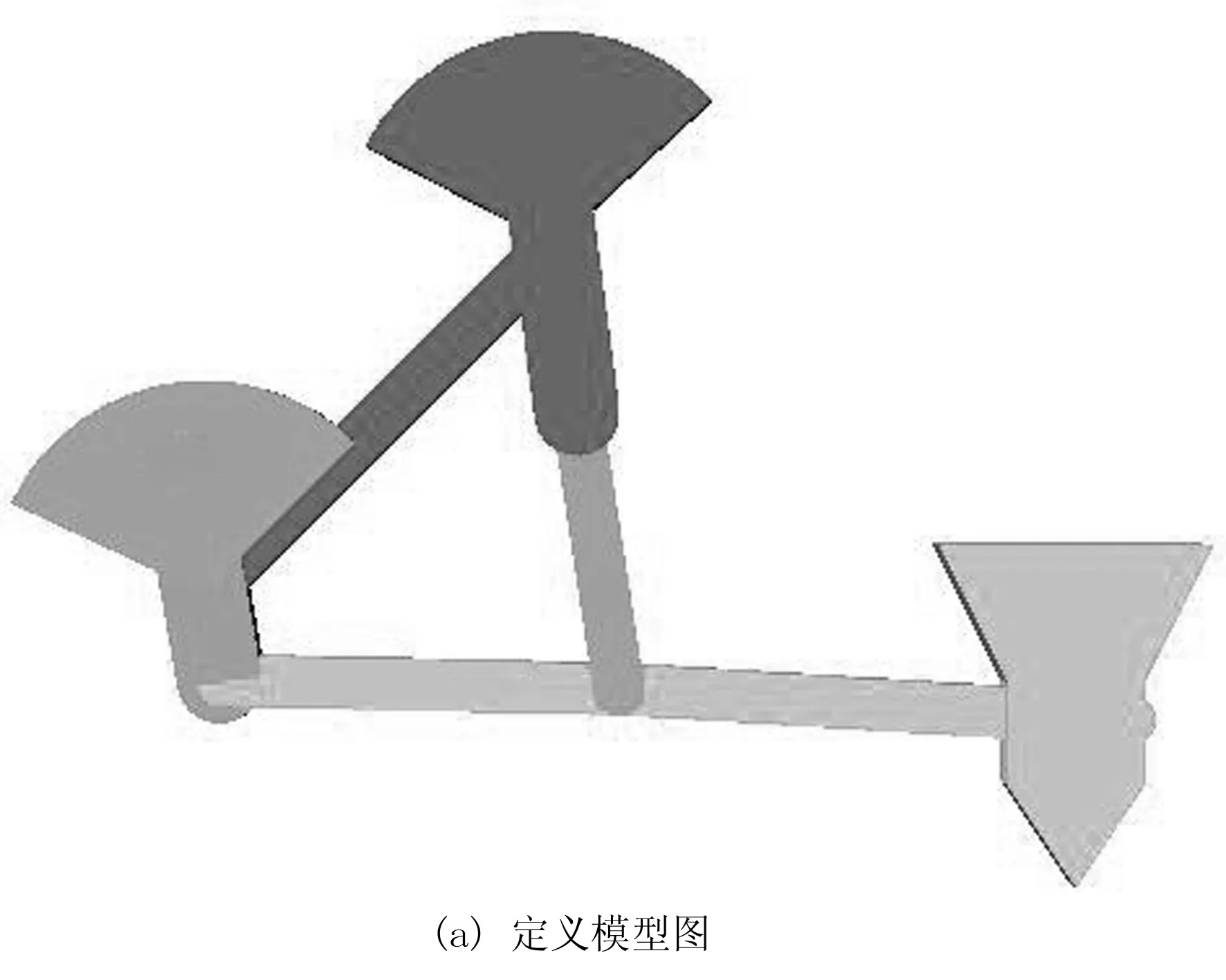
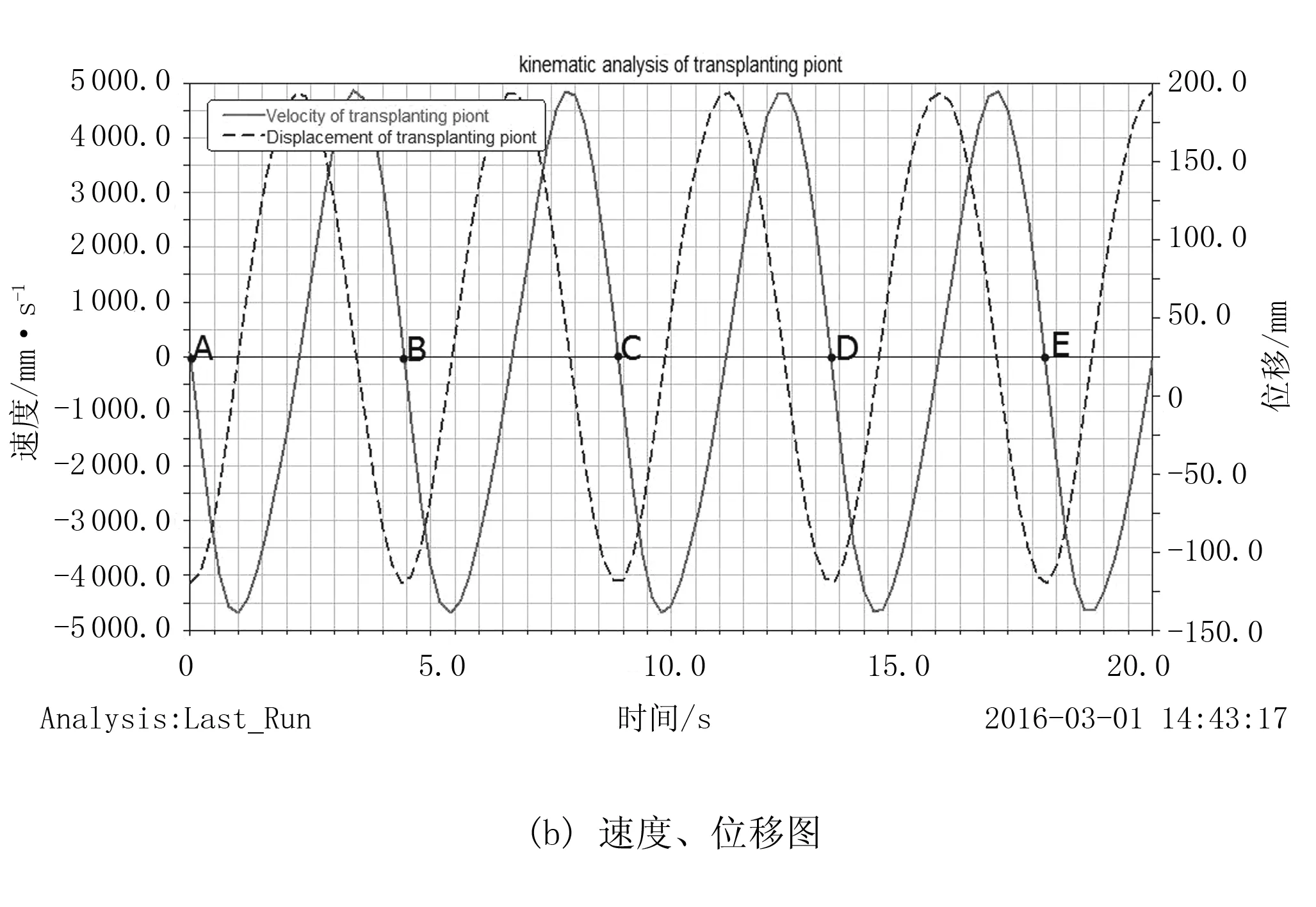
圖3 機構平衡分析
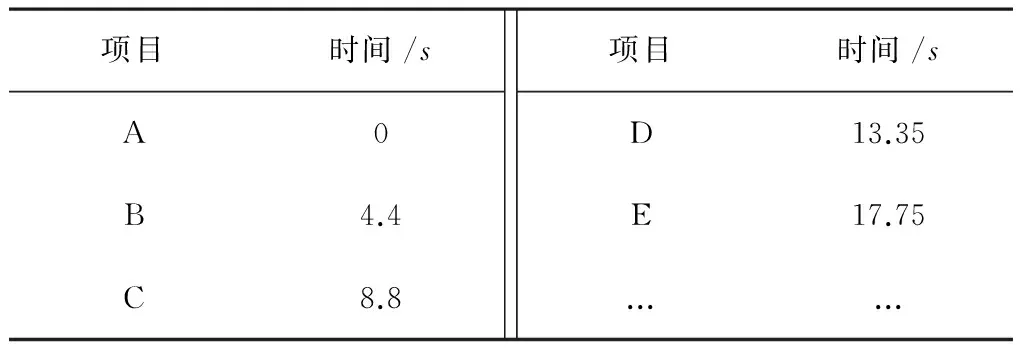
項目時間/s項目時間/sA0B4.4C8.8D13.35E17.75......
由表1可知:B、C、D、E點都是下一個投苗時間,AB時間為4.4s,BC時間為4.4s,CD時間為4.55,DE時間為4.4s,…,每次到下一投苗時間約為4.4s,時間誤差范圍很小,說明投苗時間穩定,則栽植機構運行穩定,機構平衡。
6 驗證性試驗與分析
為驗證該機構實際作業效果,于2015年11月26日在貴州省惠水縣三都鎮進行試驗,如圖4所示。

圖4 移栽機試驗
通過試驗,測量移栽株距評估移栽雙曲柄五桿機構的平衡性。試驗方法參照旱地栽植機械行業標準JB/T10291-2013性能實驗要求,每次每行連續測定株苗80株,算出株距平均值,重復5次,算出總平均值,栽植質量測量同時進行[1]。結果如表2所示。
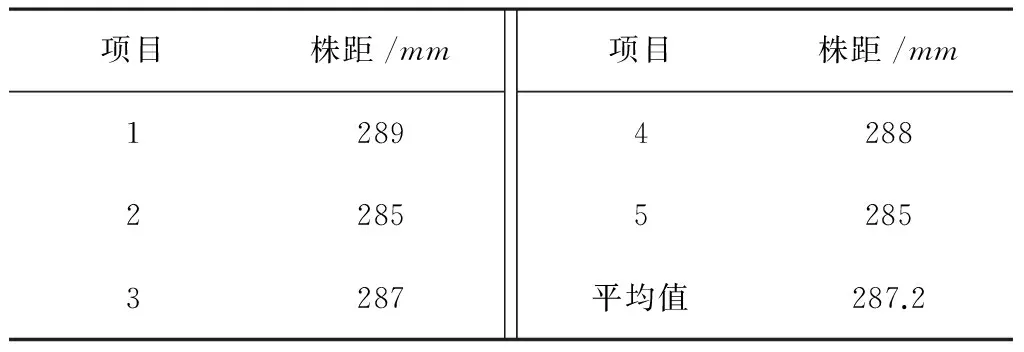
表2 栽植試驗數據
結果顯示:數據變化區間[1,4]mm,秧苗株距誤差小,則說明移栽頻率較穩定;排除在田間試驗時其他因素的影響,機構在田間的運動平穩,故此機構實現了完全平衡。
5 結論
在進行鉸鏈五桿機構擺動力完全平衡時,若1個運動構件的質量和質心位置已經確定,則另外3個運動構件的質量矩及其位置就能求出。利用質量動代換法分析桿件配重平衡,為移栽機的平面機構設計提供了理論依據。根據平衡方程,計算加在l1桿端的質量矩3.15kg·mm、l3桿端鴨嘴質量矩為6.24kg·mm、l4桿端質量矩為21.4kg·mm。
試驗結果表明:通過質量動代換法平衡的五桿機構,運動平穩、適用性強、效率高、作業質量好。
[1] 劉敏,張明,緒言,等.2ZBZ-2A型移栽機栽植機構運動學分析與試驗[J].農機化研究,2015,37(11):31-36.
[2] 金誠謙,吳崇友,袁文勝.鏈夾式移栽機栽植作業質量影響因素分析[J].農業機械學報,2008,39(9):196-198.
[3] 崔巍,趙亮,宋建農,等.吊環式移栽機栽植器運動學分析實驗[J].農業機械學報,2012,43(z1):35-38.
[4] 武科,畢新勝,陳永成.吊籃式移栽機栽植器的研究[J].農機化研究,2010,32(6):73-75.
[5] 張策.機械動力學[M].天津:天津大學,2007.
[6] 趙新華.平面連桿結構擺動力與擺動力矩完全平衡的質量動代替法[J].機械工程學報,1992,28(6):62-67.
[7] 楊延力,張明.平面連桿機構力與擺動力矩完全平衡的一般理論[J].機械工程學報,1992,28(6):99-102.
[8] 趙云.農業機械分析與綜合[M].北京:機械工業出版社,2008.
[9] 毛鵬軍,李晶,張松鴿,等.七桿式移栽機栽植機構運動學分析:基于MatLab[J].農機化研究,2015,35(12):59-62.
Balance Analysis of Planting Mechanism of a New Type of Crank Five-bar Linkages Transplanter
Ren Yongfei, Li Jie, Lin Shuyun, Bao Xiangdong
(Guizhou Mountain Agricultural Machinery Research Institute, Guiyang 550002, China)
To the problems of small massif and large slope in Guizhou, a type of double cranks five-bar linkages single duckbill plant mechanism was designed and successfully applied in 2ZBZ - 2A type transplanting machine. Firstly, the structure and working principle of 2ZBZ - 2A type transplanting machine was stated. Then, balance conditions of five-bar linkages was analyzed with mass substitution method, and the mechanism balance equation was derived. On the basis of original length of l1,l2,l3,l4,l5and mass of l2, the flywheel mass moment of l4and l5were working out as 3.15kg·mm, 6.24kgmm respectively, and 21.4kgmm for planting arm duckbill, the results indicated that the mechanism balance can be achieved. Finally, mechanism planting speed, displacement simulation curve were obtained through the software adams, combining with the verification test data, the results show that the mechanism has great stability and adaptability which satisfying design demands.
planting mechanism; mass substitution; double cranks; five-bar lingages
2016-03-31
貴州省科技計劃項目(黔科合農G字[2013]4002);中央補助地方科技基礎條件專項基金項目(黔科合條中補地[2015]4001)
任永飛(1987-),男,貴州遵義人,助理工程師,(E-mail)729634224@qq.com。
李 杰(1964-),男,貴陽人,工程師,(E-mail)1987819272@qq.com。
S223.9
A
1003-188X(2017)04-0047-04
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
電子制作(2018年18期)2018-11-14 01:48:24
產品可靠性報告(2017年7期)2017-09-05 09:49:12
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車觀察(2016年3期)2016-02-28 13:16:26
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
中國質量與標準導報(2014年1期)2014-02-28 22:21:28
