穴盤苗溫室多末端移栽機運動定位裝置設計與試驗
2017-12-16 02:48:46毛罕平韓綠化胡建平王留柱
農機化研究 2017年4期
關鍵詞:設計
嚴 蕾,毛罕平,韓綠化,胡建平,王留柱
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
?
穴盤苗溫室多末端移栽機運動定位裝置設計與試驗
嚴 蕾,毛罕平,韓綠化,胡建平,王留柱
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
為了提高穴盤苗溫室移栽機械的自動化程度和移栽效率,對溫室穴盤苗多末端移栽機運動定位裝置進行了設計。基于多末端執行器聯合作業的要求,對其分散裝置進行力學分析計算,以實現多個末端執行器等間距移動。對系統進行移位檢測試驗,檢測移栽過程中位置精度,結果表明:128穴盤、4孔花盆自動取苗移位平均值分別為32.291 1、206.324 6mm;通過單樣本t檢驗發現,在0.05顯著性水平下,實測取苗移位間隔與設計的穴孔間隔無顯著性差異,驗證了所設計自動取苗移位裝置的可靠性。
溫室;自動移栽;運動定位裝置;移位檢測
0 引言
目前,我國設施園藝生產面積已超過3 500khm2,但溫室生產裝備技術水平與發達國家相比非常低[1-3]。面對如此嚴峻的勞動力現狀,解決的有效途徑是大力改善設施農業生產裝備的技術水平,提高勞動生產率,降低生產成本。歐美、日韓許多國家已成功研制出多種類型的溫室穴盤苗移栽機械[4-7],作業效率達成800~1 000次。由于國外的溫室移栽機械主要應用于大型集約化農業生產模式,直接采購不但成本高,而且與我國農業生產模式不相適應。
國內科研人員針對穴盤苗溫室移栽機械進行了相關研究[8-12],主要基于單個末端執行器的移栽,無法大幅度提高移栽效率,而對于多末端聯合作業的研究卻很少。馮青春等人設計了4個末端執行器聯合作業的花卉幼苗自動移栽機,但對于產業化要求還有許多技術瓶頸要突破。
為此,本課題組開展了多個末端執行器聯合取苗移栽作業的研究,設計了基于PLC控制、由電機和氣壓驅動的自動移栽機,并對其中分散裝置、運動控制裝置進行設計,實現準確、高效移栽作業,降低成本。
1 多末端移栽系統總體方案的設計
穴盤苗溫室多末端移栽機械主要由穴盤輸送裝置、運動定位機構、分散裝置及控制單元組成,整體結構如圖1所示。
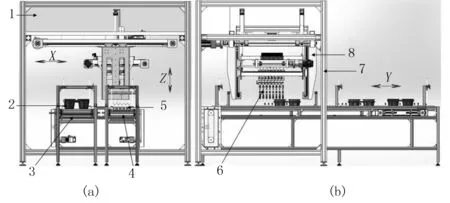
1.控制柜 2.目標盤 3.目標盤輸送裝置 4.來源盤輸送裝置 5.來源盤 6.末端執行器 7.外框架 8.取苗運動部件
移栽作業時,來源盤輸送裝置將來源盤輸送到移栽區域,目標盤經輸送裝置輸送到植苗區域。末端執行器由運動控制裝置驅動至來源盤的穴孔中心上方,沿Z方向垂直下降夾取缽體;接著,機構抬升一定高度,使得苗體脫離穴盤,運動部件再驅動末端執行器沿X方向到達目標盤穴孔中心上方,垂直下降將穴盤苗放入目標盤中,然后再原路返回至來源盤上方,進入下一周期的缽苗移栽作業;8個末端執行器在取苗和植苗時根據穴盤規格的不同,通過分散裝置調整取苗爪之間的間距隔,實現自動取、放苗。
2 多末端運動部件的設計
2.1 分散裝置的設計
2.1.1 結構及工作原理
分散裝置主要由8個兩指四針式末端執行器[15]、展合板及同步帶傳動機構組成。由于穴盤規格不同,末端執行器在移栽過程中能自動調整間距滿足間隔要求。機構中利用電機驅動同步帶傳動機構帶動展合板沿X方向橫移,取苗爪在展合板滑槽內沿Y方向分散,如圖2所示。
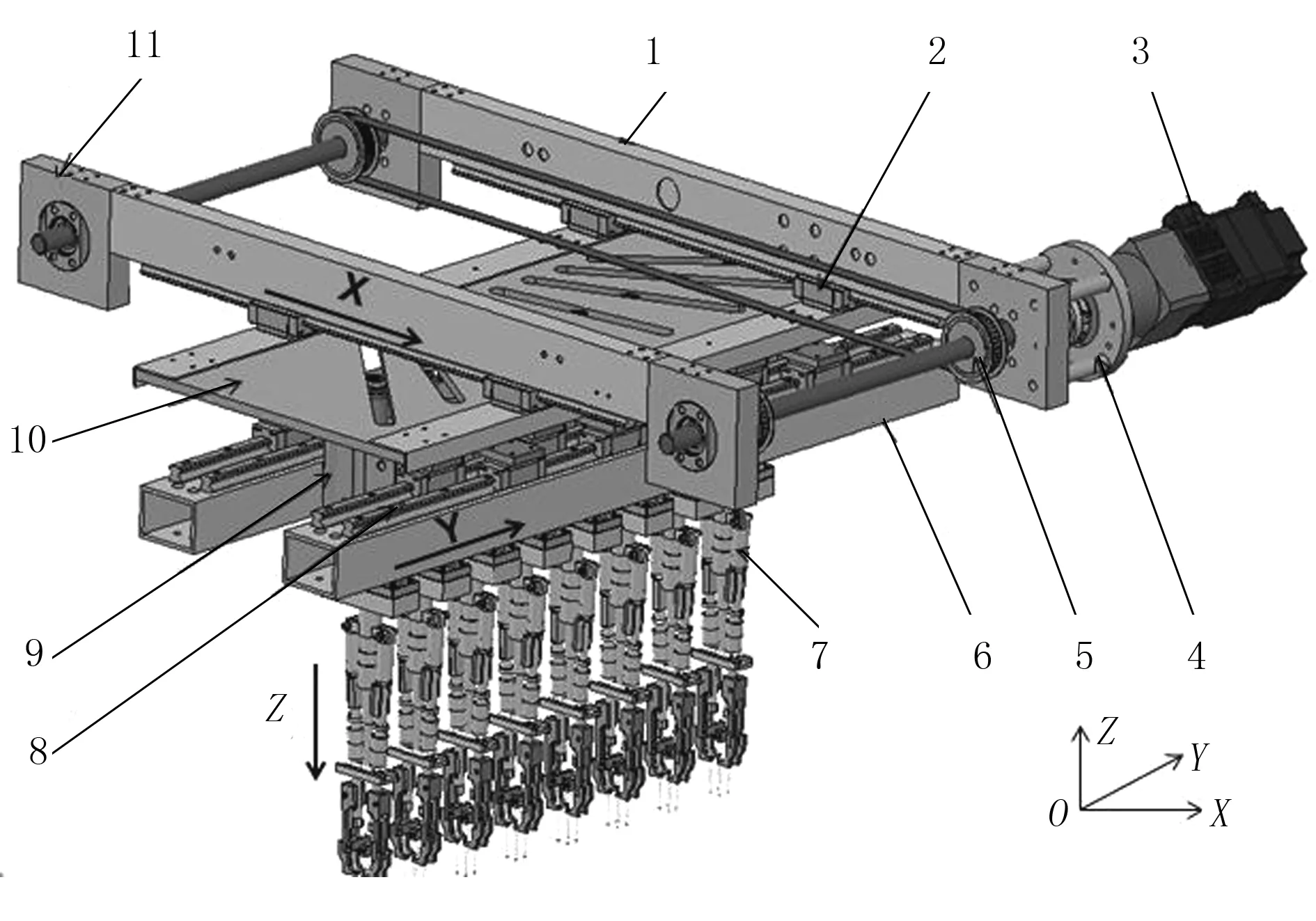
1.導軌支架Ⅰ 2.導軌Ⅰ 3.伺服電機 4.電機架 5.同步帶傳動機構 6.導軌支架Ⅱ 7.取苗爪 8.導軌Ⅱ 9.雙軸氣缸 10.分散板 11.軸架
2.1.2 展合板滑槽傾斜角度確定
展合板上的滑槽以一定規律的傾斜角度對稱分布(見圖3),每個滑槽的中心線AA’、BB’、CC’、DD’延長后匯聚一點O,滑槽分布對稱軸線為OO’;等間隔展開或合攏取苗末端執行器時,對稱軸線OO’與各滑槽中心線的夾角滿足
tanα1:tanα2:tanα3:tanα4=1:3:5:7
該機構通過斜滑槽將展合板的水平X方向平移運動轉化為取苗爪Y方向分散運動,改變了受力方向。已知穴盤最小中心距32mm,由于取苗爪的最大寬度25mm,預留氣缸接頭安裝的空間,AB=45mm,花盤的設計中心距206mm,可以采用取苗爪隔一個放苗,則A’B’的中心距可以減小1倍,即103mm。
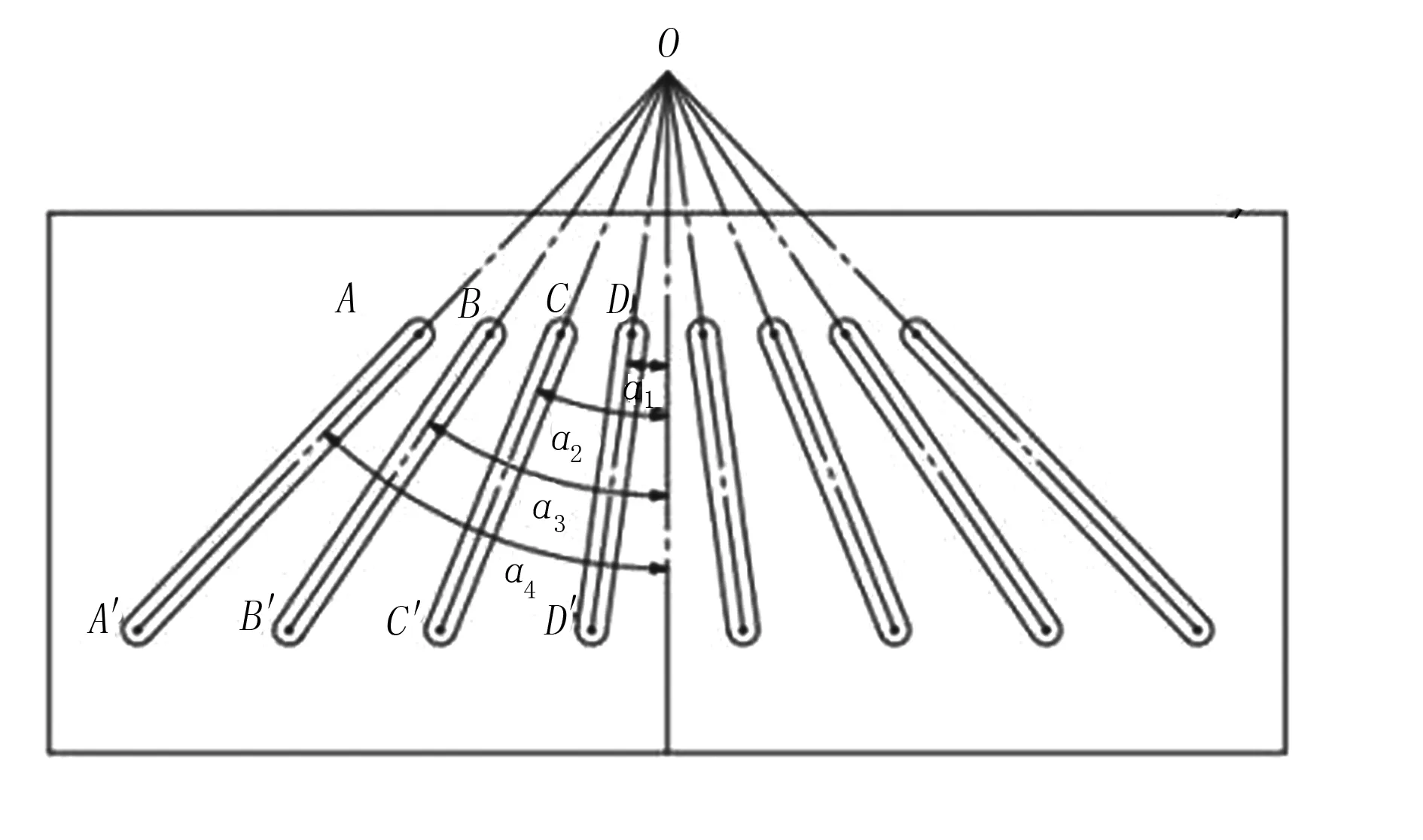
圖3 展合板示意圖
對滑槽DD’受力分析,如圖4(a)所示。由受力分析可知
F=f2+f1cosα1+N1sinα1
(1)
N+f1cosα1=N1sinα1
(2)
其中,F為展合板驅動力(N);f1為軸銷對展合板滑槽的摩擦阻力(N);f1=μ1N1;N1為軸銷對展合板滑槽的約束力(N);N2為導軌Ⅰ對展合板滑槽的約束力(N);f2為導軌Ⅰ對展合板滑槽的摩擦阻力(N),f2=μ2N2。
為便于以后的分析和求解,設θ為摩擦角,則μ1=tgθ,μ2=tgβ。
對軸銷受力分析,如圖4(b)所示。
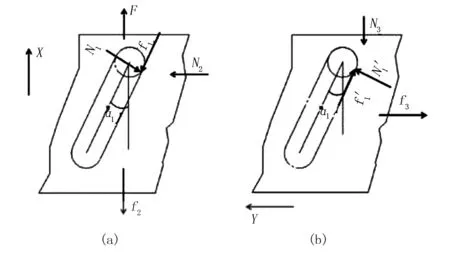
圖4 受力分析圖
由受力分析可知
(3)
(4)
其中,f3為展合板滑槽對軸銷的驅動力(N),f3=μ2N3;N3為導軌Ⅱ對軸銷的約束力(N);N1和N1’、F1和F1’為作用力與反作用力之間的關系。
由式(1)~式(4),經整理得
F/f3=tan(α1+θ)+tanβ
(5)
(6)
由于展合板一般使用塑料制成,它的滑動摩擦因數μ1遠大于導軌的滾動摩擦因數μ2,可忽略不計,則
F/f3=tan(α1+θ)
(7)
(8)
由式(7)可以看出:驅動力F隨滑槽角度的增大而增大。展合板取摩擦因數為0.5,則摩擦角θ=26.57°。對式(7)進行分析可得:
1)當α1+θ>45°,即α1<18.43°時,所需的驅動力小于滑動阻力。
2)當α1+θ>45°,即α1>18.43°時,所需的驅動力大于滑動阻力。
3)當α1+θ=90°,即α1=63.43°時,F趨向于無窮大,機構無法運行,成鎖死狀態。所以,當α1<63.43°時,可以實現展合板斜滑槽傳動。
由式(8)可以看出:當所需推力f3確定后,推力摩擦力隨著傾斜角的增大而增大(0°<α1<90°)。由于展合板上對稱分布了8個滑槽,從結構的緊湊性、省力性及摩擦力綜合考慮,α1取為7.5°合理。
2.2 X與Z方向移動機構動力與工作參數的確定
X方向平移實現從來源盤到目標盤的送苗過程。為達到高速送苗,水平方向平移采用一個伺服電機(2kW)驅動兩組同步帶直線傳動機構。當有動力輸入時,通過帶輪傳動皮帶而使滑塊運動實現取苗爪與穴孔的精確定位。由于末端執行器往復移動的距離應大于兩個穴盤/花盆的寬度(即660mm),因此水平移動的有效行程設為1 000mm。
Z方向上下運動采用同步帶傳動系統和氣動平衡系統共同實現。伺服電機(2kW)驅動兩組同步帶帶動部件運動,實現任意位置準確停靠。氣動平衡系統由精密減壓閥及快速排氣閥組成,當末端執行器上升時,精密減壓閥控制輸出壓力保持恒定;當末端執行器下降時,由于缸內壓力增大,快速排氣閥快速排氣維持壓力恒定。由于穴盤苗質量很小,相對于分散裝置可忽略不計,故不需要切換空載和滿載平衡。
分散裝置在靜態條件下受氣缸的拉力(FL)和自身重力(G)的影響,要想達到平衡,需滿足
(9)
其中,D為氣缸缸徑(mm);d為氣缸活塞桿直徑(mm);P為氣缸工作壓力(MPa)。已知參數G=450N,P=0.3(MPa),參照亞德客氣缸選型手冊和式(9)可求得:最小直徑D=40mm,d=16mm。
3 試驗
3.1 試驗方法
對取苗移位進行檢測,分析其運動特性,以考核系統的移栽效率和精度,同時為機構結構的進一步改進提供依據。測試裝置如圖5所示。
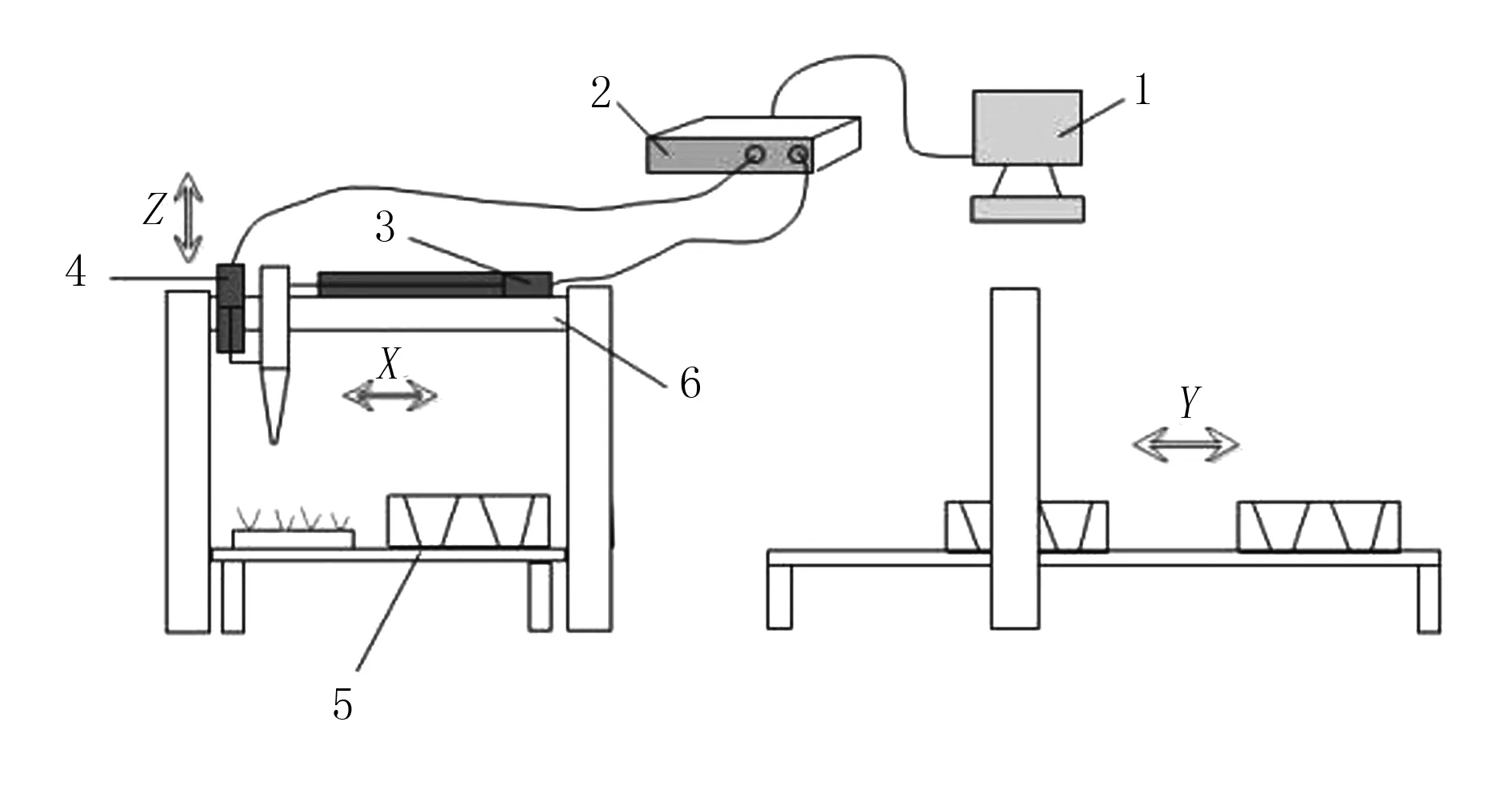
1.計算機 2.BZ7201數據采集儀 3.KTC-1250直線位移傳感器 4.KTC-350直線位移傳感器 5. 輸送裝置 6.機械臂
采用兩個直線位移傳感器分別對多末端執行機構移栽過程中水平和豎直兩個方向進行檢測,通過驅動多末端執行機構水平豎直方向往返移動從而帶動其上拉桿伸縮,引起傳感器阻值壓變,將機械位移轉化為電信號輸出,通過數據采集儀記錄位置的變化以及外界的振動干擾噪音信號。
3.2 移栽效果試驗
3.2.1 移栽試驗
假設試驗對象是從穴盤到花盆的移栽,穴盤規格是采用128孔穴盤(16×8),花盤采用4孔花盆(2×2),8個取苗爪同時工作。由于128穴孔穴盤相鄰兩個穴孔中心距小于相鄰連個取苗爪之間最小距離,花盆中心距又大于相鄰取苗爪之間最大距離,因此采用間隔取苗、間隔放苗的方式,1排取8株幼苗,分4次栽完,系統連續完成4排完整移栽動作,直線位移傳感器檢測整個移栽過程中位移變化情況。
3.2.2試驗結果與分析
圖6為末端執行器連續移栽4排幼苗到花盆中的取苗移位與時間的關系圖。
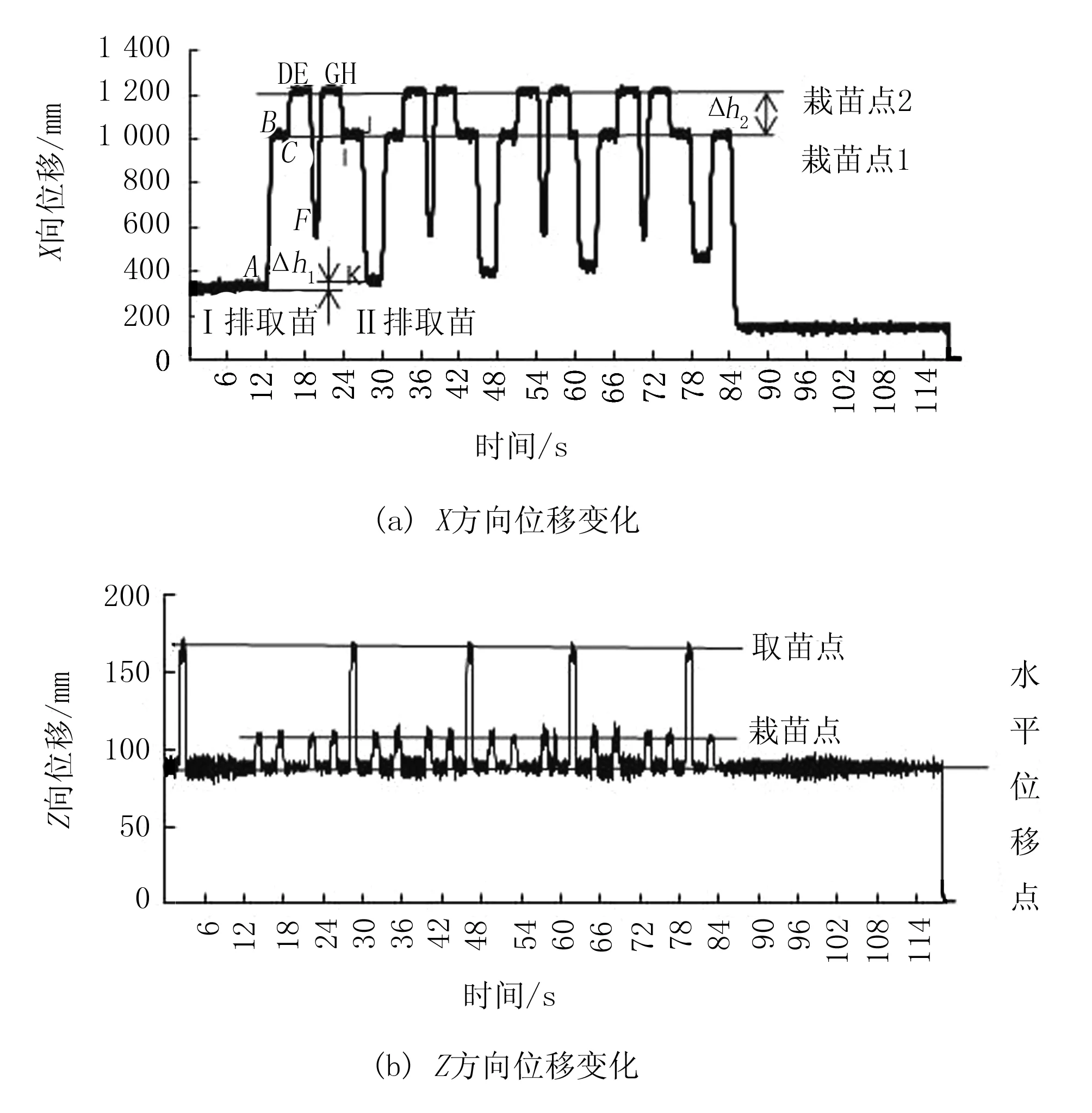
AB、CD、EF、FG、HI為水平移苗段,BC、DE、GH、IJ為豎直栽苗段。
從穴盤到花盆的移栽包括取苗和植苗兩個過程,在這一過程中取苗爪必定經過定位抓取、直線上升、直線平移、直線下降和定位移植的工作模式。在取苗點、栽苗點系統出現高頻振動信號,表現為噪音信號,而直線移位過程系統以平滑曲線運行,表明選用的控制器及移位參數設定較好。同時,在取苗點、植苗點應考慮降低振動,避免苗缽受損。
從移栽的精度來看:取苗點1和取苗點2之間的距離△h1應該等于穴孔中心距32mm,栽苗點1和栽苗點2之間的距離△h2應該等于花盆中心距206mm,才能保證準確取放苗。針對128孔穴盤,分別采集兩次取苗和栽苗△h1、△h2數據,各20組。把設計所用的穴盤穴孔、花盆間隔當作比較值,將測試所得取苗移位間隔數據△h1、△h2與穴孔間隔、花盆間隔進行單樣本t檢驗(α=0.05)。由單樣本統計數據得出,128穴盤自動取苗移位間隔平均值為32.291 1,花盆自動栽苗移位間隔平均值為206.324 5。標準差分別為0.440 5、0.164 6,檢驗結果如表1所示。
從表1中可以看出:128穴盤移位間隔距離t=2.090,臨界置信水平為0.066;花盆移位間隔距離t=1.972,臨界置信水平為0.080;臨界置信水平均大于0.05。這表明,實測的取苗移位間隔和栽苗移位間隔與設計的穴孔、盆孔間隔無顯著差異。通過試驗分析,進一步驗證了移位精度的可靠性。

表1 取苗移位單樣本t檢驗
4 結論
1)設計了一種多末端溫室移栽機械,整個系統將輸送裝置、移動定位機構、多末端執行機構及控制系統等關鍵技術融合在一起,可以適應各種規格穴盤到穴盤、穴盤到花盆的移栽,實現移栽的機械化、智能化、自動化。
2)主要以穴盤到花盆的移栽為例進行移苗試驗,整個系統能夠按照設計要求完成動作。移位間隔單樣本t檢驗分析表明:在0.05顯著性水平下,實際移位間隔與設計的穴孔、盆孔間隔無顯著差異,即移位精度滿足移栽要求。
[1] 張振國,曹衛彬,王僑,等.穴盤苗自動移栽機的發展現狀[J].農機化研究,2013,35 (5) :327-241.
[2] 李中華,王國占,齊飛.我國設施農業發展現狀及發展思路[J].中國農機化,2012(1):7-10.
[3] 杜學振,王麗紅,白人樸.我國農業勞動力需求的季節性研究[J]. 中國農業大學學報,2009,14(6):103-108.
[4] Choi W C, Kim D C, Ryu I H. Development of a seedling pick-up device for vegetable transplanting[J]. American Society of Agricultural Engineers, 2002, 45(1):13-19.
[5] 辜松,楊艷麗,張躍峰.荷蘭溫室盆花自動化生產裝備系統的發展現狀[J].農業工程學報,2012,28(19):1-8.
[6] 胡敏娟.穴盤苗自動移栽關鍵技術的研究[D]. 南京:南京農業大學,2011.
[7] 齊飛,周新群,張躍峰,等.世界現代化溫室裝備技術發展及對中國的啟示[J]. 農業工程學報,2008,24(10):279-285.
[8] 孫國祥,汪小旵,何國敏,等.穴盤苗移栽機末端執行器設計與虛擬樣機分析[J].農業機械學報,2010(10):48-53,47.
[9] 周婷,汪小旵,王超群,等.溫室穴盤苗移栽機的設計與仿真分析[J]. 機械設計與研究,2009,25(2):121-124.
[10] 高國華,馮天翔,李福.盆栽紅掌移栽手爪設計與工作參數優化[J].農業工程學報,2014,30(17):34-42.
[11] 韓長杰,楊宛章,張學軍,等. 穴盤苗移栽機自動取喂系統的設計與試驗[J].農業工程學報,2013,29(8):51-61.
[12] 馮青春,王秀,姜凱,等.花卉幼苗自動移栽機關鍵部件設計與試驗[J].農業工程學報,2013,29(6):21-27.
Design ang Test of Motion Control Device for Tray Seedings Multi-endingtransplanter in Greenhouse
Yan Lei, Mao Hanping, Han Lvhua, Hu Jianping, Wang Liuzhu
(Key Laboratory of Modern Agricultural Equipment and Technology,Ministry of Education,Jiangsu University,Zhenjiang 212013,China)
To improve the automation and efficiency of tray seedlings multi-ending transplanter in greenhouse ,amotion control device was designed.In order to achieve multiple end effectors move at equal intervals, the dispersion device was analyzed and calculated for mechanics based on requirements of joint operation for multiple end effectors. The whole system was controlled by PLC, and the position precision was detected by the linear displacement sensor. Testing results showed that in view of the 128-cell tray and 4-cell flower pot, the average step transmissions were 32.2911mm,206.3246mm.With one-sample t-test, it was found that there was no significant difference (at α=0.05) in the step transmissions between the testing value and the designed value, which demonstrated the reliability of automatic seedlings-picking device.
greenhouse; automatic transplanting; picking seedling mechanism; step transmission detection
2016-03-21
國家自然科學基金項目(51475216)
嚴 蕾(1990- ),女,江蘇如皋人,碩士研究生,(E-mail)yan_lei1990@126.com。
毛罕平(1961- ),男,浙江寧波人,教授,博士生導師,(E-mail)maohp@ujs.edu.cn。
S223.92
A
1003-188X(2017)04-0083-05
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
