均勻化育苗研究平臺的設計與試驗
2017-12-16 02:48:46徐立青高建敏崔永杰
農機化研究 2017年4期
徐立青,高建敏,崔永杰
(西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100)
?
均勻化育苗研究平臺的設計與試驗
徐立青,高建敏,崔永杰
(西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100)
標準苗的培育是機械嫁接過程的關鍵技術之一。為解決日光溫室內植物幼苗向光彎曲的問題,且為探究不同LED光質對幼苗外觀特征的影響,設計并研制了均勻化育苗研究平臺。該研究平臺由4個不同光質的培養小室組成,可根據幼苗生長期的不同,調節光源距離幼苗的高度,并利用機器視覺實時檢測幼苗外觀特征。以“北農亮砧”嫁接砧木為研究對象,在不同光照條件下進行了驗證試驗。試驗結果表明:在不同光照條件下均可培育出長勢均勻的幼苗,株高標準差小于7mm,莖粗標準差小于0.3mm,可用于培育外觀特征一致的嫁接用幼苗;系統可實現對單株幼苗的外觀特征無損檢測,操作簡單。
育苗;外觀特征;無損檢測;LED光源;機器視覺
0 引言
隨著設施園藝的迅速發展,溫室蔬菜栽培面積不斷擴大,工廠化育苗越來越受到人們的關注。為解決溫室連作帶來的病蟲害等問題,通常對蔬菜進行嫁接[1]。人工嫁接勞動強度大、效率低,阻礙了工廠化育苗的發展,因此嫁接機械化是實現工廠化育苗的保障。但由于現階段育苗模式的不同,培養的幼苗存在生長不均勻及幼苗莖稈彎曲等問題,造成嫁接機過度切削或者切削不足,降低了機械嫁接的成功率。因此,只有在提供的嫁接幼苗外觀特征達到均勻的條件下,才可保證機械嫁接有較高的成功率及成活率[2]。
光照是影響幼苗生長的最重要因素,對植物的外觀特征、光合作用、物質積累均有影響作用[3-5]。傳統日光溫室太陽光照射不均勻,幼苗會出現向光彎曲的問題,并且受陰雨及霧霾天氣的影響,幼苗根莖生長較弱,達不到嫁接的要求。隨著LED照明技術的發展,LED光源被應用到工廠化育苗生產中[6-7]。人工光型植物工廠最早是由日本提出的,千葉大學的古在豐樹等人成功開發出研究型密閉式植物工廠[8];魏靈玲等人利用不透光材料搭建了人工光型密閉植物工廠[9],利用常規方法測量光環境對幼苗生理指標及形態的影響;北京京鵬環球科技股份有限公司等人開發了一種閉鎖型育苗系統[10],系統配備紅藍相間的植物生長熒光燈和LED燈兩種方案提供光源,探究不同光源對生菜生長的影響。為了更好地獲取植物生長外觀特征參數,國內外對機器視覺無損檢測進行了研究。崔永杰等人提出了一種基于機器視覺的幼苗外觀特征自動檢測方法[11],該方法可實現對幼苗株高、莖粗、子葉展開角及彎曲方向等參數的無損檢測;馬稚昱等人設計了一套基于圖像處理的幼苗生長測量及分析的系統[12],用于反映幼苗日生長動態;楊思思等提出了一種針對植物工廠內LED人工光偏色檢測失效的圖像處理方法[13]。綜上所述,目前光源對幼苗生長影響的研究多采用常規損壞幼苗的方法測量,對圖像無損檢測的研究多為圖像處理方法的提出,對利用機器視覺自動采集幼苗圖像的人工光型植物工廠的研究較少。
本文以南瓜幼苗為研究對象,設計并研制了一種無損檢測幼苗外觀特征的人工光型均勻幼苗培育研究平臺。
1 試驗平臺的設計
1.1 功能需求
為了培育出株高、莖粗、子葉展開角等外觀特征參數均勻的南瓜砧木幼苗,本文設計的幼苗培育平臺需滿足以下4個功能要求:
1)探討不同LED光質處理對嫁接幼苗外觀特征的影響,且可根據幼苗不同生長階段所需光照強度調節光源與幼苗之間的距離;
2)需對培育幼苗的外觀特征進行無損檢測,利用機器視覺對試驗平臺培育的幼苗進行圖像采集,進一步利用圖像處理技術獲取幼苗外觀特征參數;
3)利用數字傳感器獲取幼苗生長的外界環境參數,并反饋給上位機進行部分環境參數的調節。
為滿足上述功能要求,本文結合穴盤育苗方式研制了一種基于機器視覺的實現側面連續采集幼苗圖像的研究平臺,如圖1所示。該研究平臺的生產栽培架由鋁型材搭建,外圍由黑色不透光的PC板圍護,以保證完全隔絕外界自然光的進入。該栽培架尺寸為1 000mm×500mm×900mm,共分為兩層栽培空間,適用于穴盤基質無土栽培。該育苗平臺由4部分組成,主要包括栽培區、高度可調節LED光源機構、幼苗外觀特征無損檢測機構、環境信息采集及控制模塊。
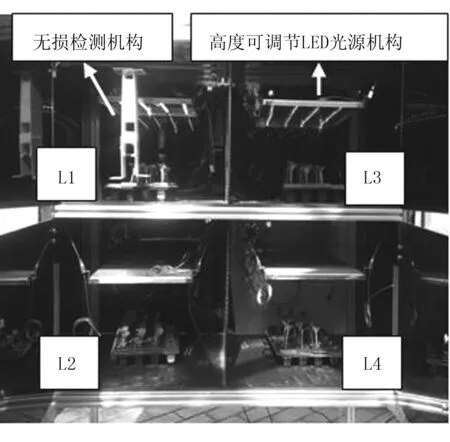
圖1 人工光型育苗箱的總體結構
1.2 高度可調節LED光源機構
1.2.1 光源設置
該育苗平臺設計了4個LED光源小區,分別為:L1—白色LED光源小區;L2—單色紅光LED光源小區;L3—紅藍光組合(紅光:藍光為8:1)LED光源小區;L4—單色藍光LED光源小區。每個光源小區的隔層均用黑色不透光PC板進行隔斷,以防止其他組光源對該試驗組的影響。如圖2所示,每個小區內安裝一塊LED光源板,光源板粘貼4條規格相同的LED燈帶,每條燈帶間隔距離為70mm。LED光源光照時間由定時器控制,可根據植物的需要設置不同的光照周期。一般來說,光照時間越長,越利于培育外觀粗壯的幼苗[5],但綜合考慮能源消耗問題,本文設置明期、暗期各12h。
1.2.2 高度調節機構
由于作物在不同階段的生長、光合作用和物質積累方面存在差異,導致了作物不同生長階段所需的光照強度也不盡相同。本文根據作物生長特點設計了光源高度調節機構。圖2(b)中,該機構由LED光源板、可調節長度鋼絲繩及高度標尺3個部分組成。LED光源板由4條可調節長度的鋼絲繩懸掛于育苗箱頂部,通過對鋼絲繩長度的縮放,完成光源板高度調節。
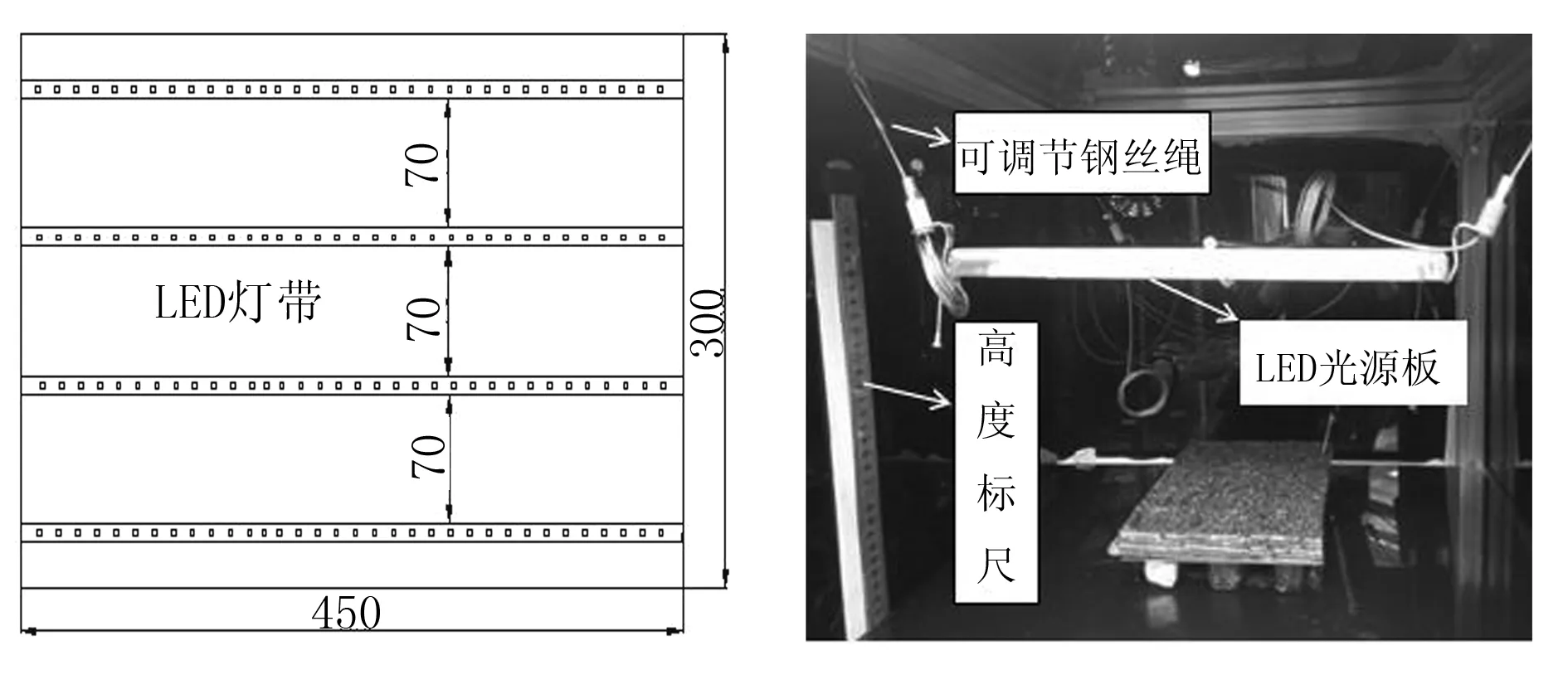
(a)LED光源板粘貼示意圖 (b)高度調節機構
1.3 幼苗外觀特征無損檢測機構
1.3.1 硬件設計
根據需要檢測的幼苗外觀特征參數、穴盤尺寸、攝像機的分辨率、攝像機活動范圍等條件,綜合考慮提出一種可以實現側面連續拍攝單株幼苗的圖像采集機構,如圖3所示。該機構由步進電機、驅動器、絲杠、滑塊、直線導軌,以及霍爾傳感器Ⅰ、Ⅱ、連桿和相機組成。本研究選用德國映美精產的DFKAFU130-L53彩色相機,待測物體持續移動,仍可以精準的對焦抓取影像。相機通過CA-USB30-AMB-BLS/3連接線與計算機相連,獲取分辨率為640×480pixels的圖像。相機通過連桿與滑塊連接,控制器通過單片機I/O口控制步進電機的旋轉,實現滑塊帶動連桿及相機沿直線導軌水平移動,完成對幼苗圖像的采集。
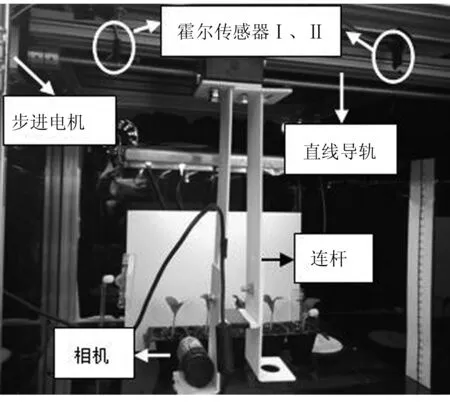
圖3 圖像自動采集裝置
1.3.2 軟件設計
外觀無損檢測流程如圖4所示。結合前期基礎研究,本系統軟件采用C語言開發編程,便于可視化編程和調試。電機行進安全行程與初始位置原點由安裝在步進電機直線導軌上的一對霍爾傳感器Ⅰ、Ⅱ實現;自初始位置開始,步進電機帶動相機沿直線導軌自動實現向右行進50mm的距離,控制軟件控制相機對單株幼苗采集一張圖像;在采集完第5株幼苗圖像后,到達設置終點,步進電機帶動相機反向行進250mm回到初始位置待機,等待下一個循環的開始。圖像拍攝由軟件IC capture2.3對相機進行控制,將直線導軌和工業相機配合后,首先根據步進電機的行進速度及幼苗之間的距離,來確定相機在兩株幼苗之間的行進時間;再利用相機控制軟件設置相機抓取圖像時間間隔及圖像儲存位置,確保自動采集的圖像清晰、完整;最后利用MatLab程序對幼苗圖像進行圖像處理,獲取幼苗外觀特征參數[11]。圖5(a)、(b)分別為相機控制界面、采集到的單株幼苗圖像;圖6為MatLab圖像處理得到的結果界面,包括幼苗生長狀態的判斷、株高和莖粗的測量值。
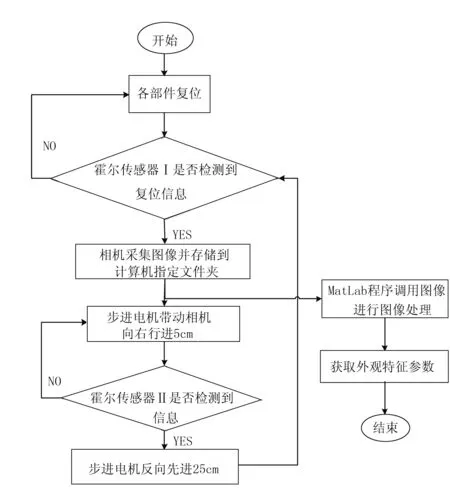
圖4 外觀無損檢測流程
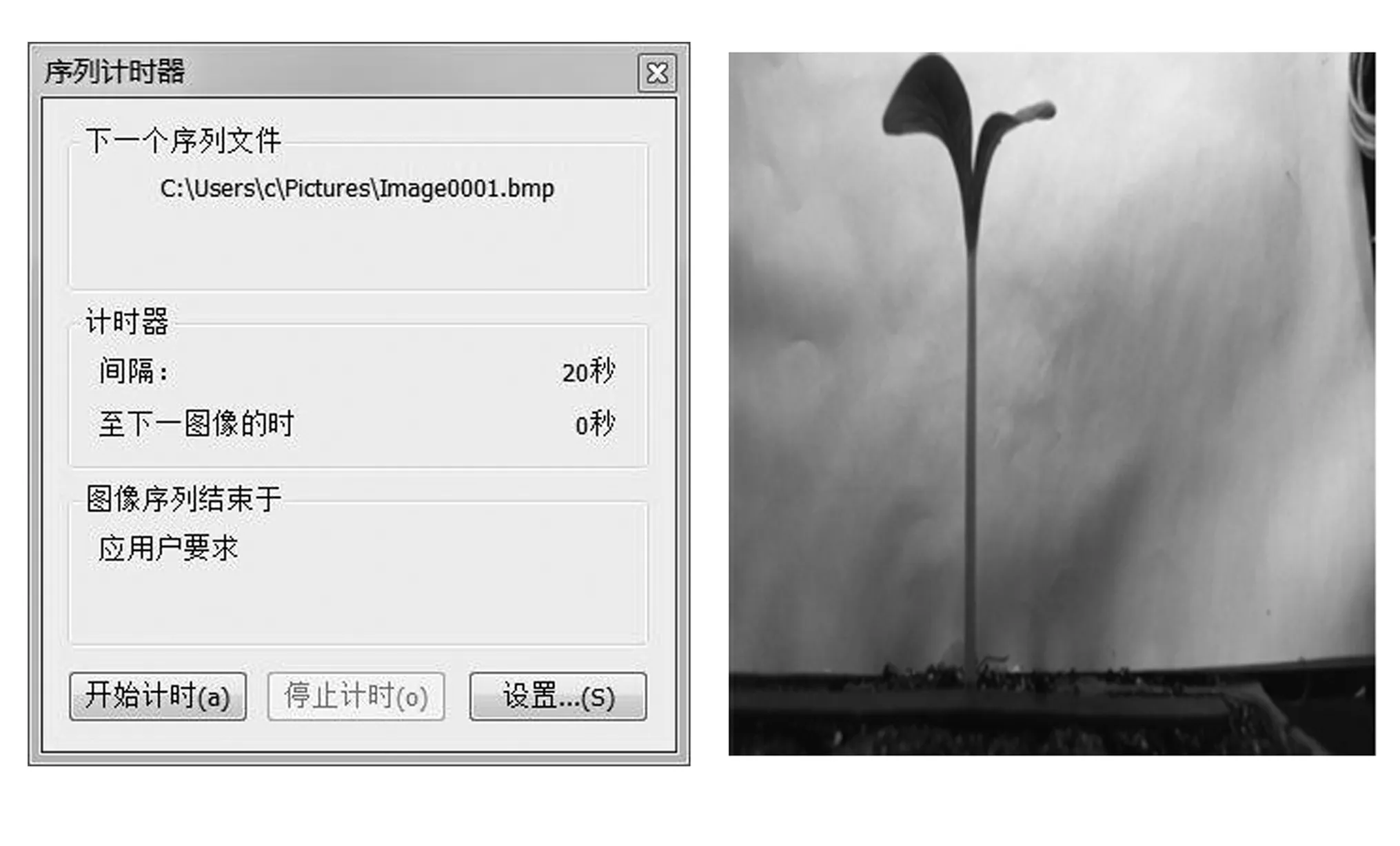
(a)相機控制界面 (b)原始圖像
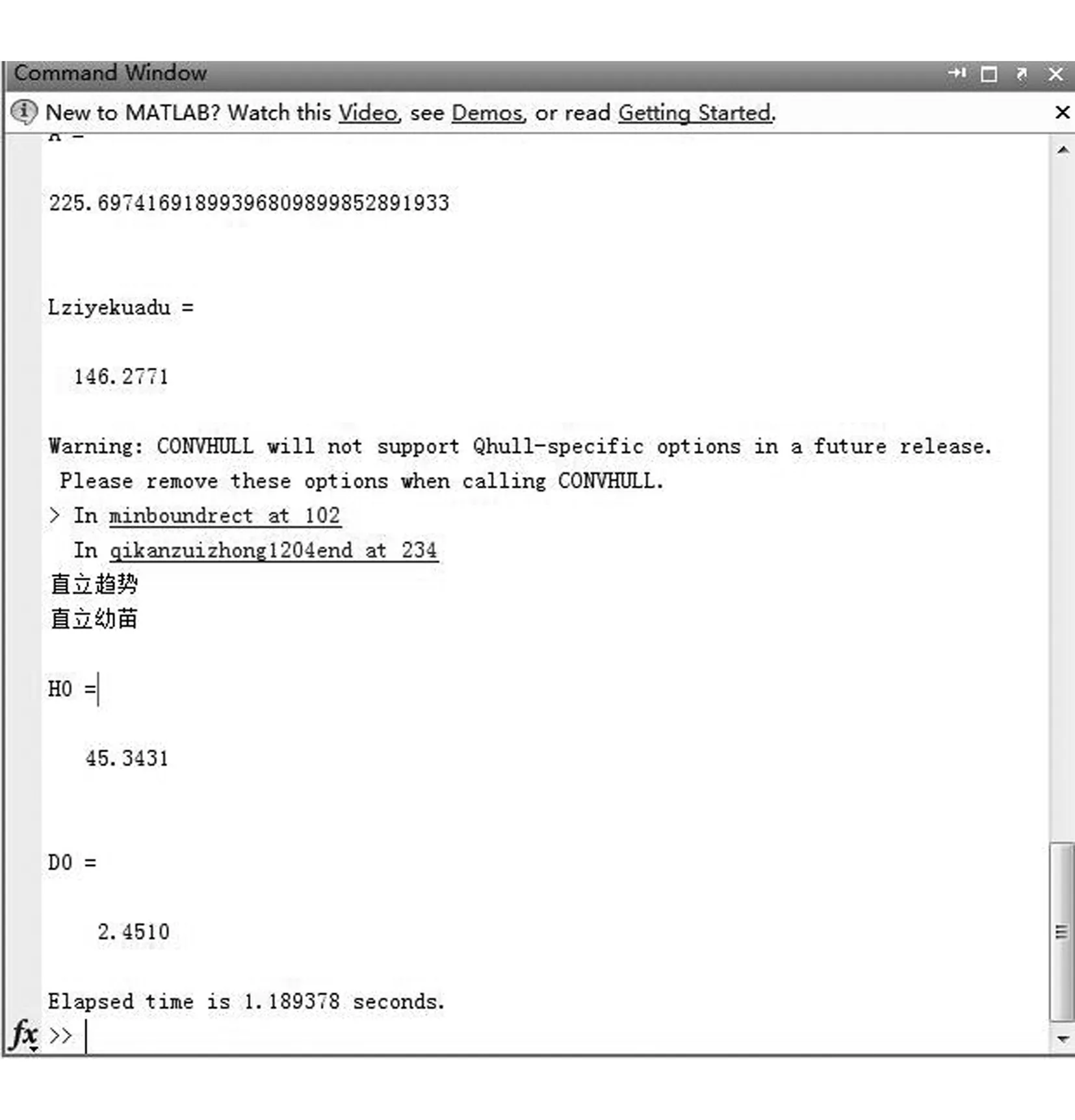
圖6 MATLAB處理界面
1.4 環境信息采集及控制系統
該系統采用Arduino pro mini單片機,采用C/C++語言開發編程。育苗箱內的環境信息采集系統主要利用空氣溫濕度傳感器AM2302、土壤濕度傳感器YL-69對育苗箱內的空氣溫度、濕度及土壤濕度進行監測,并通過單片機將采集到的數據每隔10s傳遞到上位PC機。育苗箱內的控制系統主要控制人工光源光照時間、光源小區內通風機構,以及圖像采集機構步進電機的行進、停止及正反向行進。單片機對采集的數據與設定值進行比較,當育苗箱內的溫度過高或者濕度過大時,控制器將控制微型風扇打開,通過將育苗箱內的氣體與外界空氣進行交換,以達到降低溫度和濕度的目的。
2 性能測試
為了檢驗人工光型育苗箱的光照設置、無損檢測裝置和整體運行效果,在育苗平臺內進行了幼苗培育試驗。
2.1 試驗材料及方法
本試驗于2015年6月1日-2015年6月9日在陜西省楊凌區西北農林科技大學南校區連棟日光溫室中進行。在4種光譜能量分布的LED光源培養小區L1、L2、L3、L4內進行嫁接砧木南瓜苗的培育。試驗以黃瓜專用砧木“北農亮砧”為研究對象,采用基質(蛭石:草炭:腐熟雞糞=2:1:1)栽培,每組光源小區內栽培幼苗15株,共60株;南瓜種子經催芽后定向播種,培養條件如下:溫度為白天25℃、夜間18℃,相對濕度80%,光照周期為明期/暗期=12h/12h。
幼苗圖像由圖像采集裝置從出芽第1天開始進行采集,至幼苗生長至兩葉一芯時停止。
根據前期的研究基礎,測量的幼苗外觀參數包括株高、莖粗及生長狀態。測量結果利用SPSS-Statistics19.0進行統計分析,利用函數繪圖軟件Origin進行數據處理及作圖。
2.2 結果及分析
2.2.1 無損檢測效果
將催芽后的南瓜種子播種在穴盤內,經過48h后出芽后,開始對幼苗進行圖像自動采集,直至幼苗生長到符合嫁接標準結束圖像采集。圖7為出芽第1天至幼苗符合嫁接期間自動采集的圖像及利用MatLab程序[11]處理得到相應的圖像處理效果。
以出芽后第3天的60株幼苗為對象,將手工測量的株高、莖粗與無損檢測到的株高、莖粗的數值進行比較,計算其絕對誤差,來衡量無損檢測效果。由表1可知:株高的圖像測量值與手工測量值的絕對誤差小于4mm,莖粗的圖像測量值與手工測量值的絕對誤差小于0.6mm。
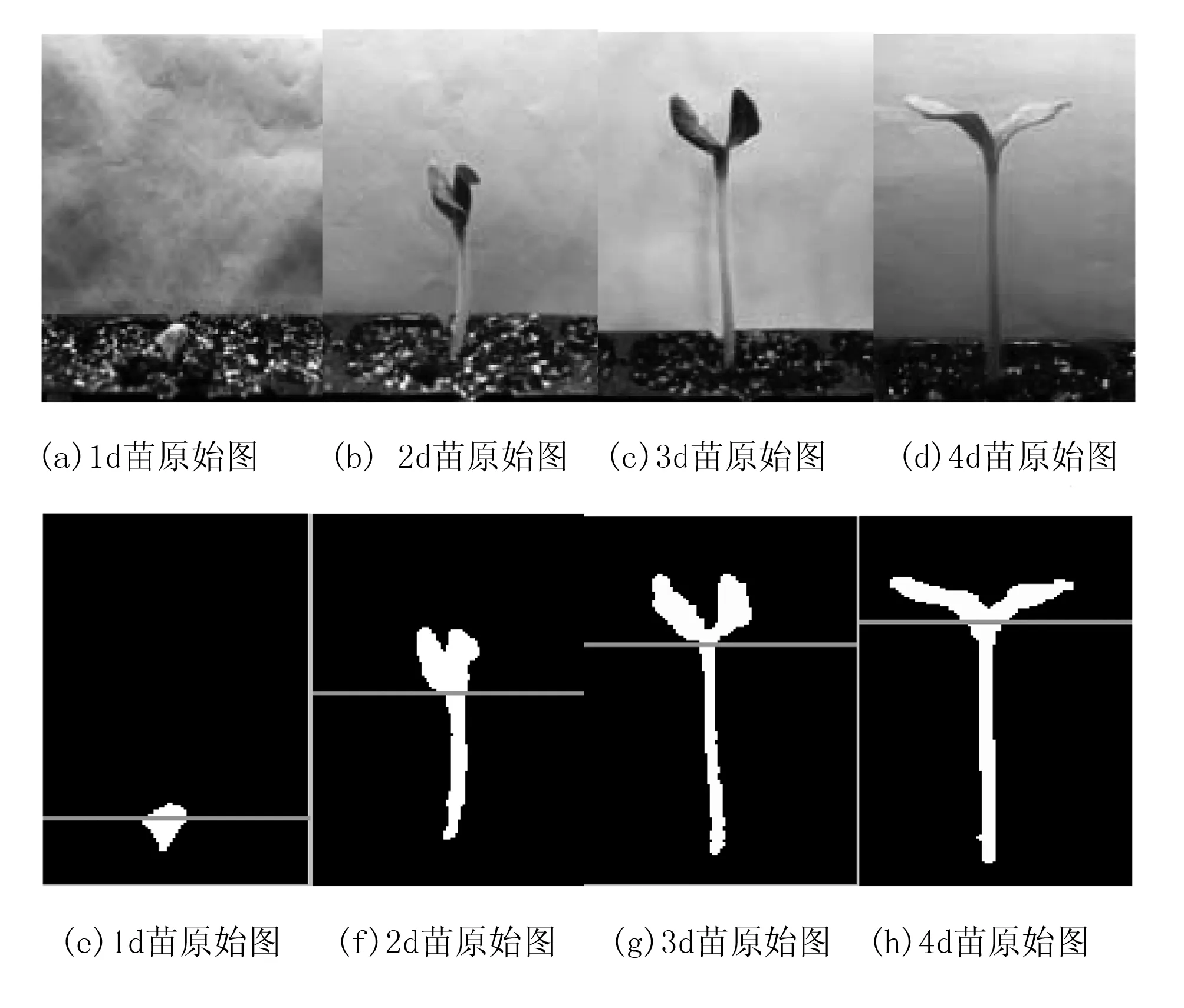
圖7 幼苗原始圖及圖像處理結果
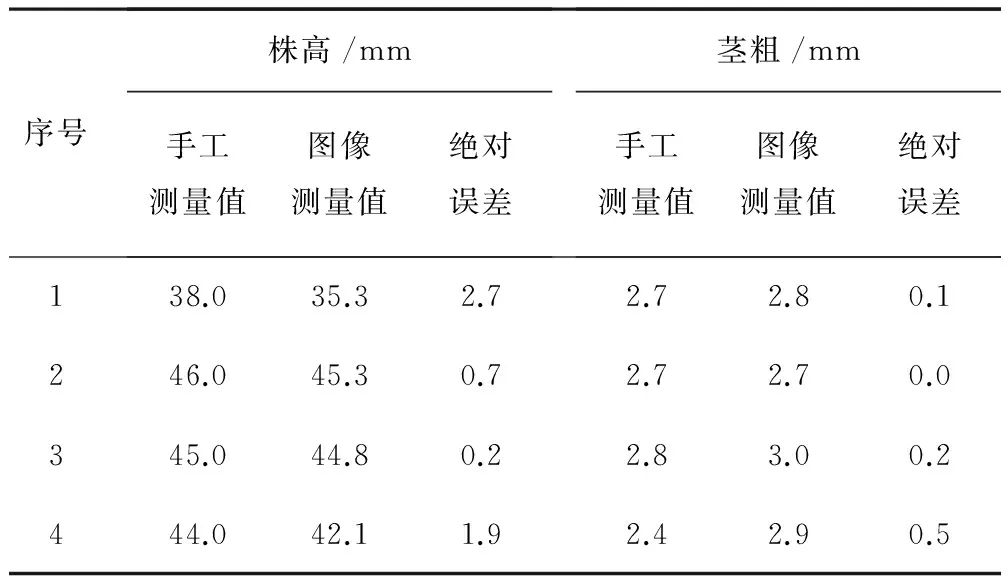
序號株高/mm手工測量值圖像測量值絕對誤差莖粗/mm手工測量值圖像測量值絕對誤差138.035.32.72.72.80.1246.045.30.72.72.70.0345.044.80.22.83.00.2444.042.11.92.42.90.5
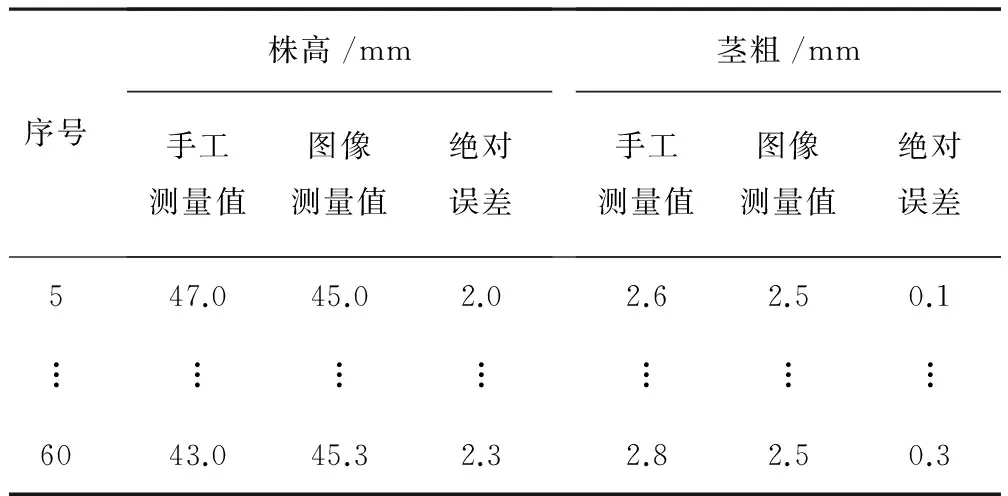
續表1
2.2.2 光源設置效果判定
不同的光源環境下,幼苗的生長狀態有所不同。首先根據對幼苗生長狀態的判定,來確定光源設置是否均勻。幼苗根據生長狀態分為直立幼苗、斜直幼苗和彎曲幼苗3種,統計3種幼苗的株數如表2所示。
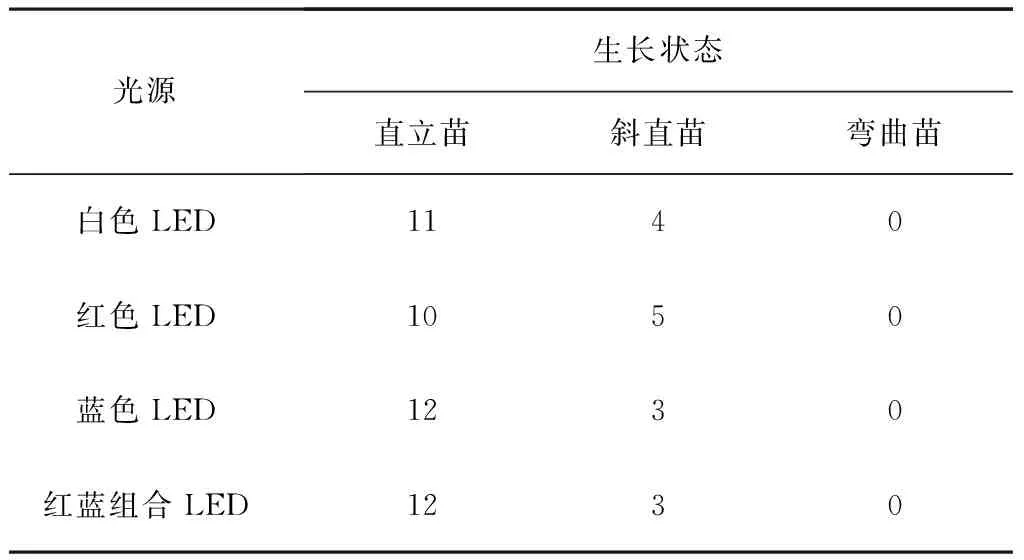
表2 幼苗生長狀態判定
斜直幼苗在嫁接過程中對機械嫁接的成功率影響較小,可以不予考慮;而彎曲幼苗因彎曲度較大,會造成機械嫁接中切割過度或不充分,從而導致機械嫁接的成功率降低。因此,在培育幼苗時壞苗率只考慮彎曲苗。當光源布置不均勻時,幼苗會出現向光彎曲的現象。由表2可以看出:4組幼苗中均未出現彎曲苗,因此該育苗箱光源布置均勻,適合培育用于機械嫁接的幼苗。
2.2.3 整體運行效果
根據前期調研可知:嫁接砧木株高達到70.0~80.0mm左右、莖粗達到2.5~3.0mm左右、真葉有兩葉一芯、顏色為深綠色、開角平展在100°~120°之間時,就可認為是符合機械嫁接用的幼苗。如圖8所示,4組LED光源處理下的幼苗株高測量值分別為75.6±6.9mm、76.8±5.8mm、68.7±4.5mm、73.1±5.9mm,而莖粗測量值分別為2.8±0.2mm、2.7±0.2mm、2.6±0.3mm、2.8±0.4mm。除紅色LED小區內培養的幼苗株高值低于可嫁接株高范圍外,其他3個光源小區內培養的幼苗株高和莖粗均達到了可嫁接范圍。馬稚昱[3]等人提出光質對植物的影響與植物種類有關,因此不同光照條件對南瓜幼苗的影響還需要進一步探討,以培育出適合機械嫁接的均勻化幼苗。
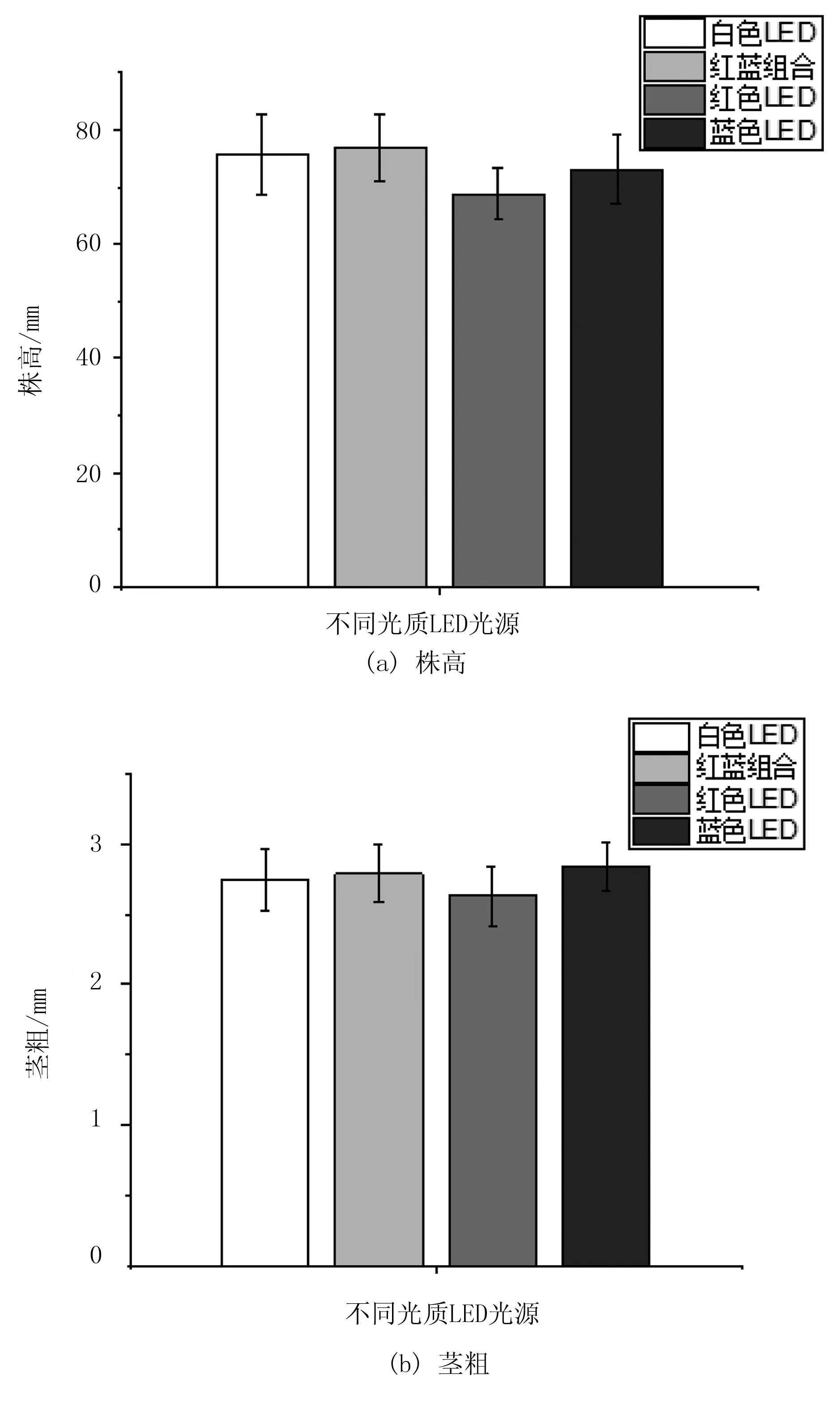
數據為平均值,誤差線的表示使用標準差。
3 結論
1)本文通過前期的試驗及方法研究,確定了主要的機構參數,設計并研制了一種培育外觀特征均勻的幼苗的研究平臺,詳細介紹了高度可調節LED光源機構、幼苗外觀特征無損檢測機構、環境信息采集及控制機構的各個組成部分。
2)在育苗箱內進行了育苗試驗,結果表明:4組光源小區內無彎曲苗出現。該研究平臺內光源設置合理,苗株長勢均勻,株高標準差小于7mm,莖粗標準差小于0.3mm。該研究平臺可作為不同LED光源影響試驗研究平臺,為培育外觀均勻的南瓜幼苗提供技術支持。
3)利用圖像無損檢測幼苗外觀生長狀態,結合環境條件控制,縮短幼苗培育周期成為下一步的研究目
標。作為前期試驗研究,樣本數量較少,后期應該增加樣本數量,對培育外觀特征均勻的南瓜幼苗作進一步深入探究。
[1] 辜松.蔬菜工廠化嫁接育苗生產裝備與技術[M].北京:中國農業出版社,2006.
[2] 辜松,江林斌.國內外蔬菜嫁接機的發展現狀[J].東北農業大學報,2007,38(6):847-851.
[3] 馬稚昱,辜松,羅錫文.不同光質對嫁接砧木下胚軸生長的影響[J].農機化研究,2010,32(11):185-187.
[4] 范志強,余霞,王軍,等.不同光強對油菜葉片生理活性的影響[J].安徽農學通報,2008,14(20):26-27.
[5] 高芳云,王芳,鄧漢文,等.不同光質LED燈育苗對設施番茄生長及產量的影響[J].長江蔬菜,2015,14(4):54-55.
[6] 劉文科,楊其長.植物工廠LED照明應用的幾點思考[J].照明工廠學報,2015,26(4):98-102.
[7] 趙啟蒙.用于植物生長補光的LED照明系統研究[D].上海:復旦大學,2012.
[8] Chun C,Kozai T. A closed-type transplant production system.In Proc. Molecular Breeding of Woody Plant[C]//N. Morohoshi and A. Komamine,eds. The Nether-lands: Elsevier Science, 2001:375-384.
[9] 魏靈玲,楊其長,劉水麗.密閉式植物種苗工廠的設計及其光環境研究[J].中國農學通報,2007,23(12):415-419.
[10] 尚守海,周增產,卜云龍,等.JPWZ-1 型微型植物工廠的研制[J].農業工程,2012,2(1):44-47.
[11] 崔永杰,王霞霞,徐立青,等.基于機器視覺的嫁接用苗外觀特征自動檢測[J].農業機械學報,2014,45(4):89-95.
[12] 馬稚昱,羅錫文,辜松.嫁接幼苗無損狀態測量技術的研究[J].中國科學,2010,40(S1):117-124.
[13] 楊思思,周泓,虞俠挺.基于機器視覺的人工光植物工廠植物生長狀況監測系統[J].傳感器與微系統,2014,33(12):88-90.
[14] 賀冬仙,朱本海,楊珀,等.人工光型密閉式植物工廠的設計與環境控制[J].農業工程學報,2007,23(3):151-157.
[15] 李海云,韓國徽,任秋萍,等.不同光周期對黃瓜幼苗生長的影響[J].西北農業學報,2009,18 (3) :201-203.
[16] Morimoto T, Torii T, Hashimoto Y. Optimal control of physiological processes of plants in a green plant factory[J].Control Eng.Practice,1995,3(4):505-511.
[17] 胡永光,李萍萍,堀部和雄.日本的植物工廠及其新技術[J].世界農業,2002(11):45-46.
[18] 劉文科,楊其長.植物工廠LED光源與光環境智能控制策略[J].照明工程學報,2014,25(4):6-8.Abstract ID:1003-188X(2017)04-0088-EA
Design and Experiment of Research Platform for Uniform Seedlings
Xu Liqing, Gao Jianmin, Cui Yongjie
(College of Mechanical and Electronic Engineering, Northwest A&Forestry University, Yangling 712100, China)
Abstract: Cultivation of standard seedlings is one of the key technologies in the process of mechanical grafting. A uniform seedling research platform was developed to solve the problem of bend seedlings in solar greenhouse, and study the influence of different LED lights to the external features of seedlings. It consists of 4 cultivated rooms with LED device adjusted to apply different growing periods and enables real time detection of seedling appearance characteristics by machine vision. By cultivating rootstock (Beinongliangzhen) under different LED lights in the seedling box, seedlings grew evenly under regular light with plant height standard deviation less than 7 mm and thick stems standard deviation less than 0.3 mm. These results indicate that this seedling box can foster seedling graft stocks with consistent appearance characteristics and the system may realize nondestructive testing of signal seedling’s appearance characteristics. The operation is simple.
seedlings; external features; non-destructive detection; artificial LED light; machine vision
2016-03-24
國家高技術研究發展計劃項目(2012AA10A506)
徐立青(1989-),女,山東冠縣人,碩士研究生,(E-mail)xuliqing0426@163.com。
崔永杰(1971-),男(朝鮮族),吉林圖們人,副教授,博士生導師,(E-mail)cuiyongjie@nwsuaf.edu.cn。
S223.1+3
A
1003-188X(2017)04-0088-05
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小讀者(2021年2期)2021-03-29 05:03:48
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
瘋狂英語·新悅讀(2019年11期)2019-12-18 05:14:16
華人時刊(2019年13期)2019-11-17 14:59:54
NBA特刊(2018年21期)2018-11-24 02:48:04
文苑(2018年22期)2018-11-19 02:54:14
