智能軌跡控制割草機器人設計—基于FPGA神經網絡
2017-12-16 02:49:09袁路路張娓娓
農機化研究 2017年4期
袁路路,張娓娓
(河南工業職業技術學院,河南 南陽 473000)
?
智能軌跡控制割草機器人設計—基于FPGA神經網絡
袁路路,張娓娓
(河南工業職業技術學院,河南 南陽 473000)
為了提高割草機器人自主導航和定位的精確性和智能性,設計了一種新型的基于FPGA神經網絡算法的割草機器人。該設計采用FPGA可重構技術,以3層誤差反向傳播神經網絡作為典型的模型來展開;利用成熟的BP算法公式,設計了割草機器人智能控制的模型;利用FPGA技術,設計了割草機器人的硬件系統;最后采用文本輸入的設計方法,利用田間試驗的方式,對機器人的軌跡規劃能力和控制精度進行了驗證。試驗結果表明:利用FPGA和神經網絡模型可以有效地穿越5個障礙物,并可得到滿意的軌跡規劃結果。將普通的PID控制器和神經網絡PID控制器得到的控制結果誤差進行了對比,結果表明:神經網絡PID控制器得到的割草機器人控制誤差明顯比傳統的PID控制器誤差小。該方法為神經網絡的硬件實現提供了可靠的理論基礎。
割草機器人;神經網絡;軌跡規劃;FPGA重構;PID控制器
0 引言
隨著農業機械化程度的不斷推進,農業智能化和自動化也得到了飛速的發展,這期間涌現了各類智能作業機器人。割草機器人屬于新型的農業機器人,在國內的研究和實際應用還比較少。智能控制理論是一門綜合性很強的新興學科,屬于自動化領域的前沿學科之一,智能控制的發展為解決不確定性系統及復雜的非線性系統的控制開辟了新的途徑。FPGA現場可編程邏輯門陣列應用技術是當前的一個研究熱點,而對于基于FPGA的神經網絡智能算法的研究具有重要的現實意義,將其作為嵌入式系統嵌入到割草機器人的軌跡規劃和控制系統中,將會發揮重要的作用。
1 智能割草機器人機械結構和運動模型
本文中智能割草機器人的姿態控制采用碼盤讀數的方式。一般機器人使用碼盤讀數是利用一定的間隔時間讀數1次,然后從最底層得到上一次的輪角度數據,數據需要經過換算。在割草機器人智能控制系統中,由于只能將得到的角度值和坐標軸值進行累加,因此只能間隔一定時間讀出碼盤的測算值,然后將測算值和前一秒的位置進行比較,從而獲得偏移量,進而補充寫入機器人的內部姿態存儲區,控制機器人的運動。機器人的坐標位置模型如圖1所示。
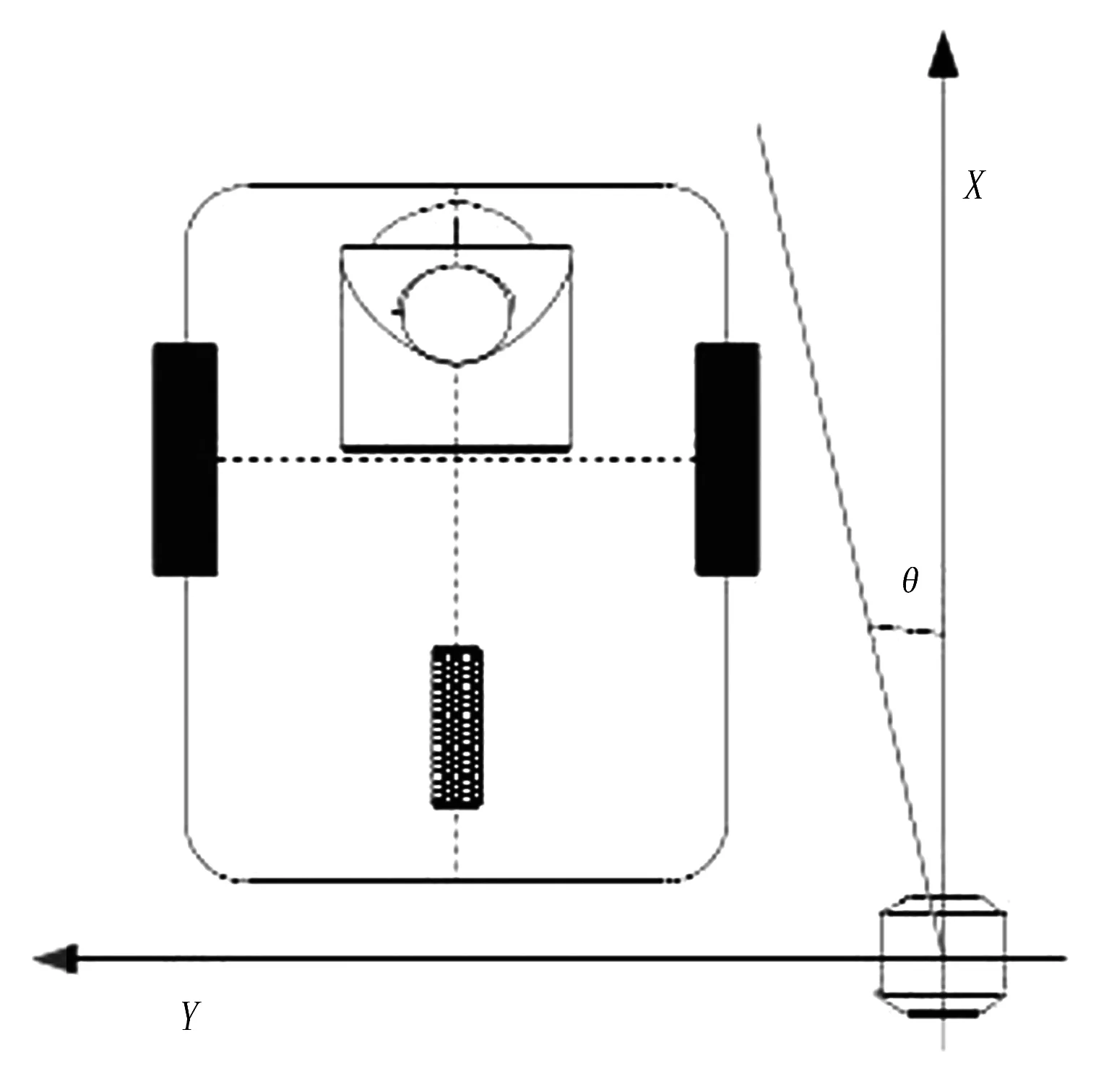
圖1 機器人坐標位置模型
cm=πDn/nCe
(1)
其中,Dn為機器人移動輪的直徑;Cg為編碼器的分辨率,該分辨率表示1個脈沖輪子轉過的角度;n為輪軸到碼盤軸的傳動比;Cg為割草機器人移動距離和碼盤脈沖的轉換系數。因此,左輪和右輪之間的位移Δl、Δr和機器人的位移Δs分別為
Δl=cmNL
Δr=cmNR
Δs=(Δr+Δl)/2
(2)
其中,x、y向和轉角的基本公式為
x′=x+Δscosθ
y′=y+Δssinθ
θ′=θ+Δθ
(3)
割草機器人通過左右輪移動距離的不同來改變方向。假設移動方向定義為Δθ,碼盤的采樣周期是20ms,當量比較小時有Δθ=(Δr+Δl),則機器人的位置變化如圖2所示。
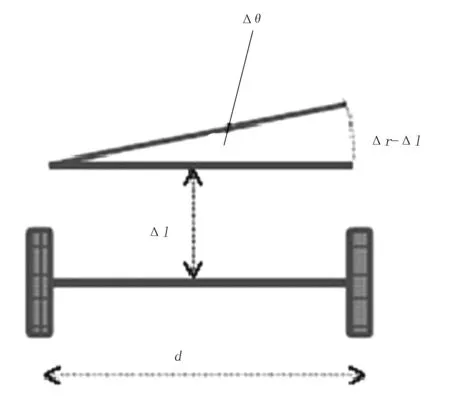
圖2 機器人的運動模型
本設計中的割草機器人采用雙差速進行驅動,驅動輪安裝有高轉矩、高速可逆直流電機驅動,驅動器上有高分辨率的光電碼盤,碼盤用于高精度的位置測量。
圖3為機器人的運動軌跡控制曲線。軌跡控制包括位移和轉角的控制,控制方式采用FPGA控制系統。FPGA是一種專用的集成控制電路,克服了傳統控制電路可編程器件電路數有限的缺點,配合神經網絡控制算法,可大大提高割草機器人的控制精度及機器人的設計效率。
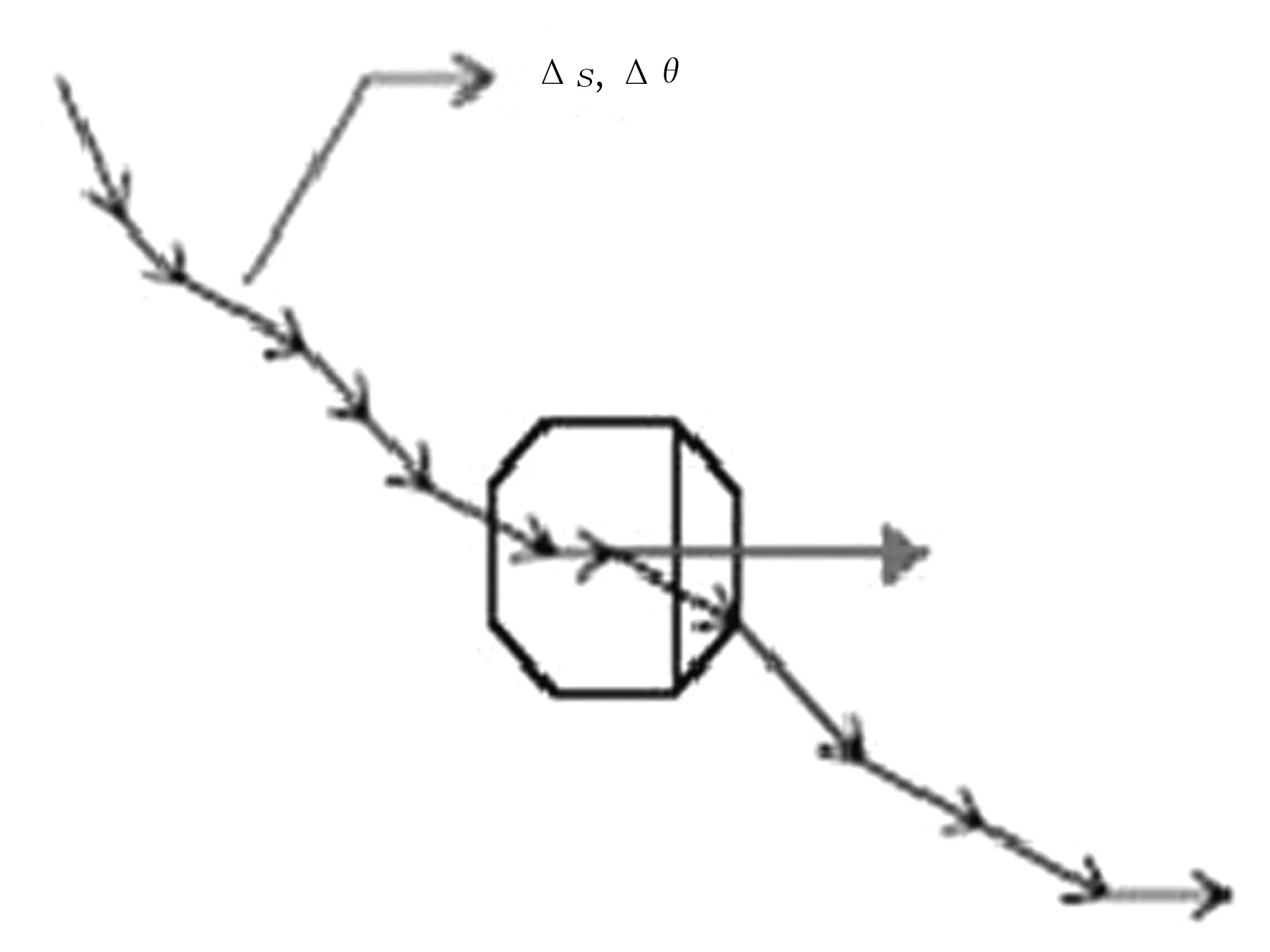
圖3 機器人運動軌跡
2 FPGA和神經網絡智能控制算法
人工神經網絡是人工建立的網絡拓撲,以連續或者斷續的輸入和輸出進行信息的加工和處理,是基于人的認知過程的一種新型算法。假如現在只有一些輸入和輸出數據,而對于輸入如果得到輸出的機理并不清楚,因此可以將輸入和輸出之間的關系看作是一個未知的網絡,通過不斷的訓練輸入和輸出網絡,調節各節點的權值,來獲得滿足需求的輸出,其結構模型如圖4所示。
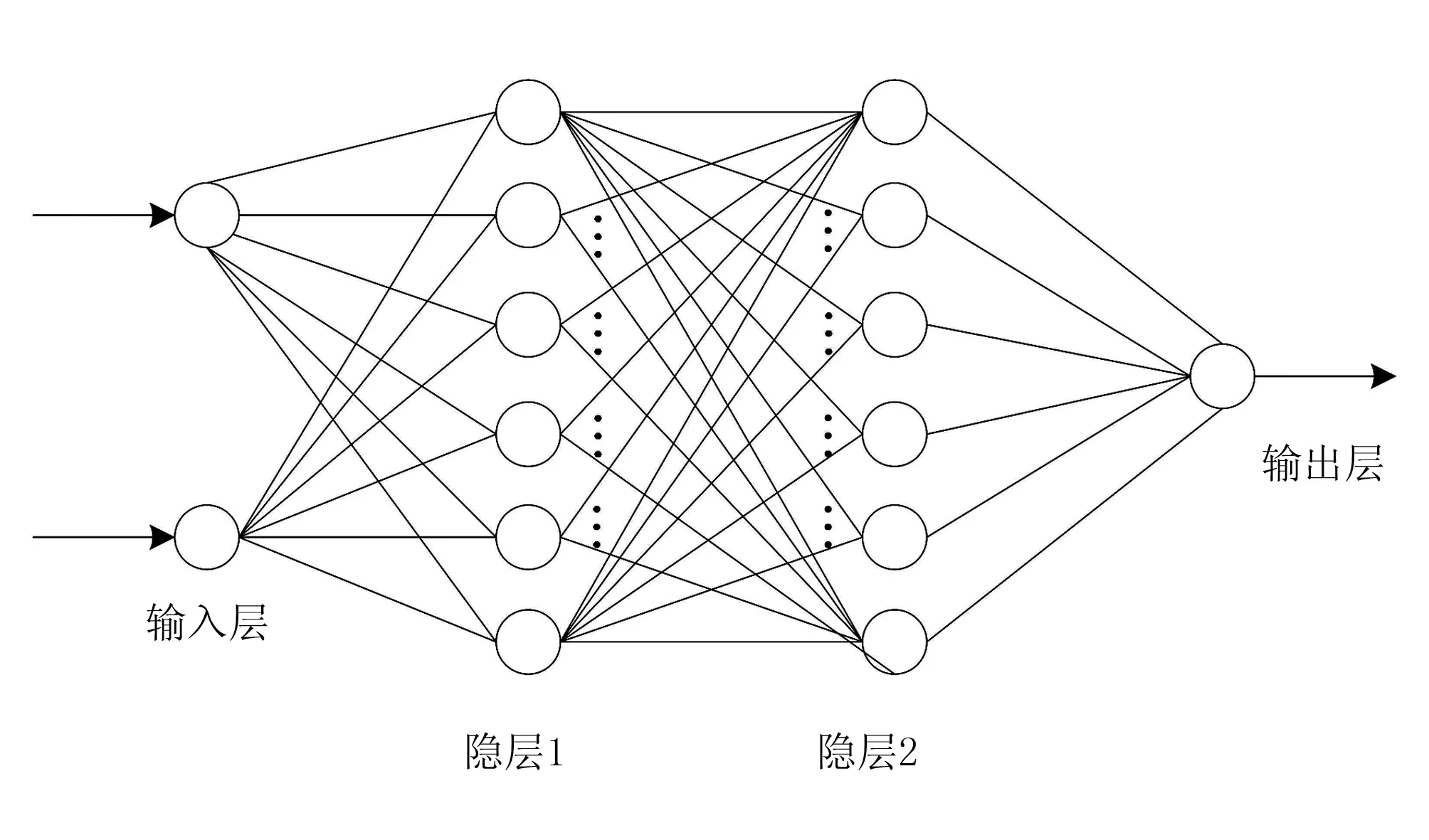
圖4 神經網絡基本模型
模型由3層構成,包括輸入層、輸出層和隱含層,層數越多表示計算越精確,但需要的計算時間也越長,因此在實際應用時需要根據實際需求來設置層數。由大腦的神經元工作機理,人們構造了人工神經網絡的數學模型,是大腦的模擬和簡化,其結構如圖5所示。
關注營養。營養是衡量創新菜的標準,如果菜品具備的色、香、味達到一定的標準,但營養與衛生方面存在問題,也會阻礙創新菜的研發與使用。所以,在創新中國菜時,需要結合營養搭配的理念,實現膳食均衡,不僅體現出創新菜的特色,還要體現出菜品的營養與原料的合理配制,才能保證創新菜足夠環保,為享用者提供健康安全食用的條件[1]。
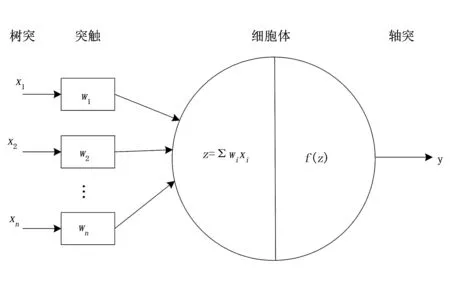
圖5 神經網絡生物學模型
圖5中,神經元xi對輸入信息的感知能力用wi表示,稱為關聯權;f(z)表示輸出函數。其中,輸出函數的表達式為
(4)
其中,sgn(.)為符號函數;θ為閾值。一般來說,一個神經網絡是由多個輸入和輸出構成的,當wi確定時,不管什么樣的輸入xi,(i=1,2,…,n),都很容易得到輸出值。確定wi的過程也是訓練的過程,本次設計采用單層前向神經網絡模型,表達式為
Y=f(WTX-θ)
(5)
其中,W=(wij)mxn為權重系數的矩陣;X、Y、θ分別為輸入向量、輸出向量和閾值向量。為了確定權數wij,修正輸入輸出偏差,權值的修正公式為
W(t+1)=W(t)+δW(t)
δW(t)=(δwij(t))
δwij(t)=εt((dj(t)-yj(t))xi(t))m×n
(6)
其中,xi(t)、dj(t)(i=1,2,…,m,j=1,2,…,n)分別為t組的輸入和輸出的期望數據;εt為學習的效率,可以調整計算的速度。同權值的修正公式類似,閾值的修正公式可以表示為
θ(t+1)=θ(t)+δθ(t)
δθ(t)=εt((dj(t)-yj(t))n×1
(7)
通過更新權數和閾值使得輸入輸出偏差趨于零。假設學習步驟的序號為t,t=0表示神經網絡的初始狀態,則割草機器人神經網絡智能控制的算法實現步驟如下:
1)初始賦值。指定割草機器人的初始位置,將神經網絡的權值和閾值分別賦值。
2)計算樣本的輸出值。選擇一個軌跡控制樣本為網絡輸入,計算軌跡的實際輸出。對于第p個控制軌跡,其輸出為Y(p)=[Y1(p),…,Yn(p)]。其中,Yi(p)=f(∑wijxj-θi),i=1,…,n。
3)計算輸出誤差,根據實際輸出結果和期望結果的差值,確定輸出誤差。
4)對權數進行修正。如果δt=0,則不用調整;如果其值不為零,則根據權值的調整公式(6)進行調整。
5)訓練樣本。對輸入或者輸出誤差進行干預,通過一定的學習算法,提高計算精度,從而可以提高割草機器人軌跡控制的準確性。
軌跡的控制以位移和轉角為控制對象,控制器使用FPGA神經網絡控制器。該控制器可以實現位移和轉角的測量,并根據設定的值對位移和轉角進行調節,其中調節算法選用神經網絡算法。整個控制系統的硬件由FPGA核心控制器、光電編碼器、傳感器、信號放大電路、A/D轉換模塊和控制執行件組成。FPGA采用通斷控制來計算,其控制器按照PID算法,通過FPGA輸出一定周期的PWM波,調節繼電器的導通時間,實現執行部件的開關,達到控制軌跡的目的,其結構如圖6所示。
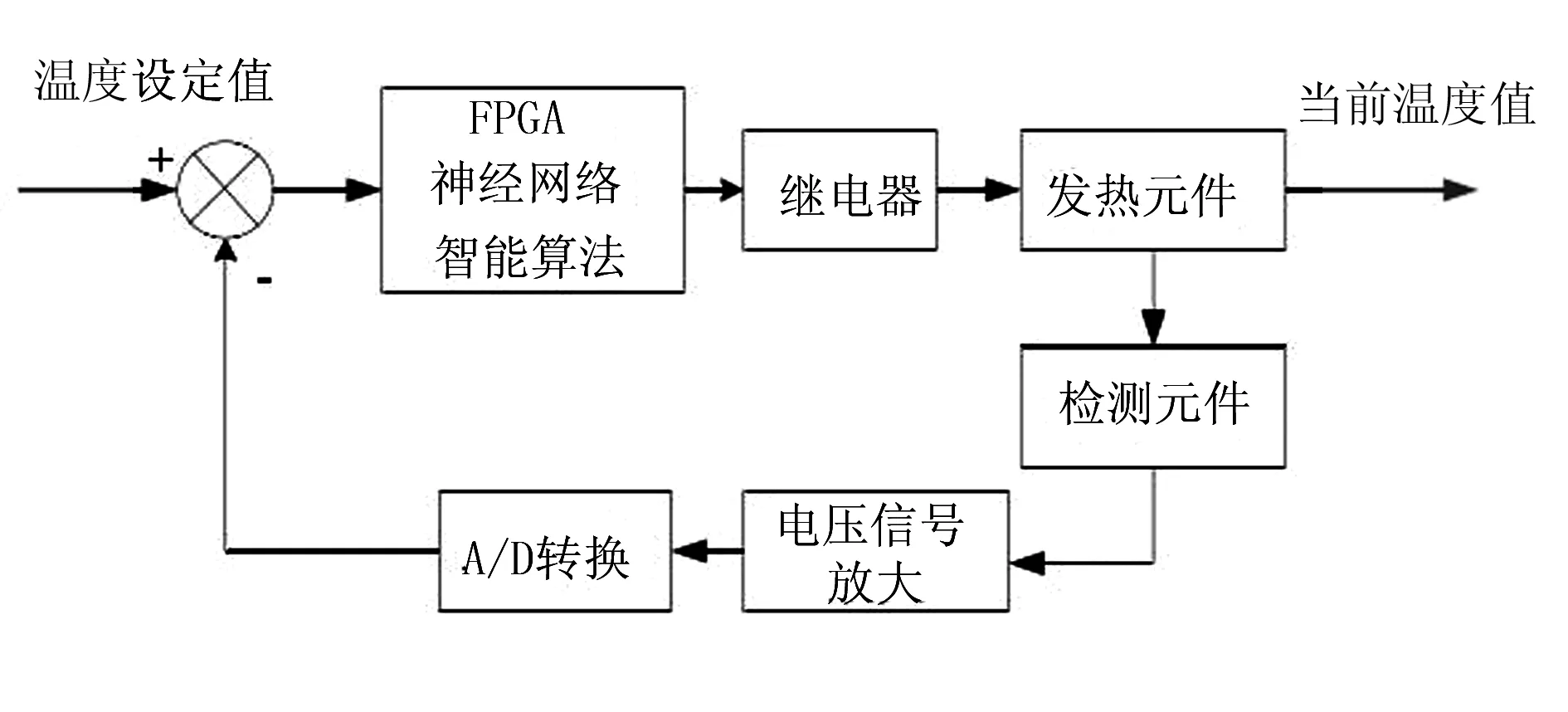
圖6 軌跡控制系統控制框圖
位移和角度信號通過A/D轉換器由模擬量轉換為數字量,將軌跡的檢測值和設定值進行比較。如果不符合設定值,FPGA神經網絡PID算法根據給定值和檢測值求出PID控制需要的3個參數;然后,利用PID公式求控制量;最后,將控制量轉換為波控制繼電器。如果檢測的值和設定值比較低于設定值,則將PWM的波占空比降低,提高軌跡的控制量的數值。
3 鋤草機器人運動軌跡智能控制測試
為了驗證基于FPGA和神經網絡算法的鋤草機器人的智能軌跡控制能力,在田間對鋤草機器人進行了測試。設計的機器人樣機具有三指手爪結構,可實現苗間鋤草和行間鋤草,并可有效地避開禾苗,其結構和作業過程如圖7所示。
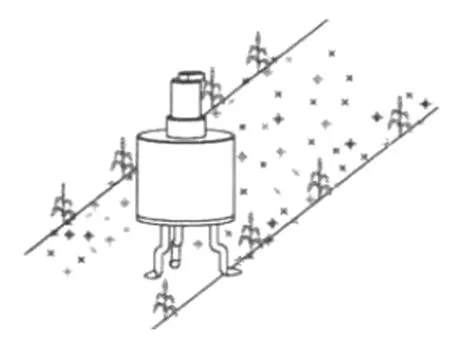
圖7 鋤草機器人測試示意圖
工作時,機器人的兩個割刀連續入土切割,從而實現鋤草功能。系統根據機器視覺來定位苗草的位置信息,并利用FPGA和神經網絡算法進行精確定位與導航。為了驗證鋤草機器人的導航功能,在禾苗間和田間設置了許多障礙物,障礙物在三維空間的神經網絡模型如圖8所示。
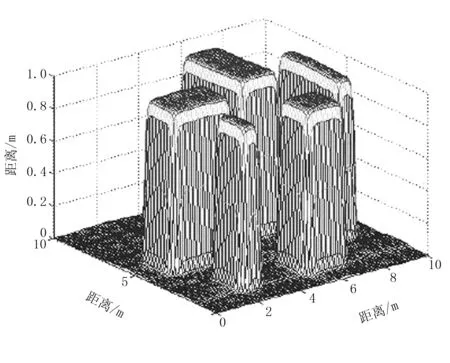
圖8 多個障礙物神經網絡模型
圖8中,每一層表示中間的路徑點,每個方框都代表了一個障礙物,將各中間點的x和y坐標輸入神經網絡各層,模型就可以輸出待調整的路徑。調整后的路徑如圖9所示。
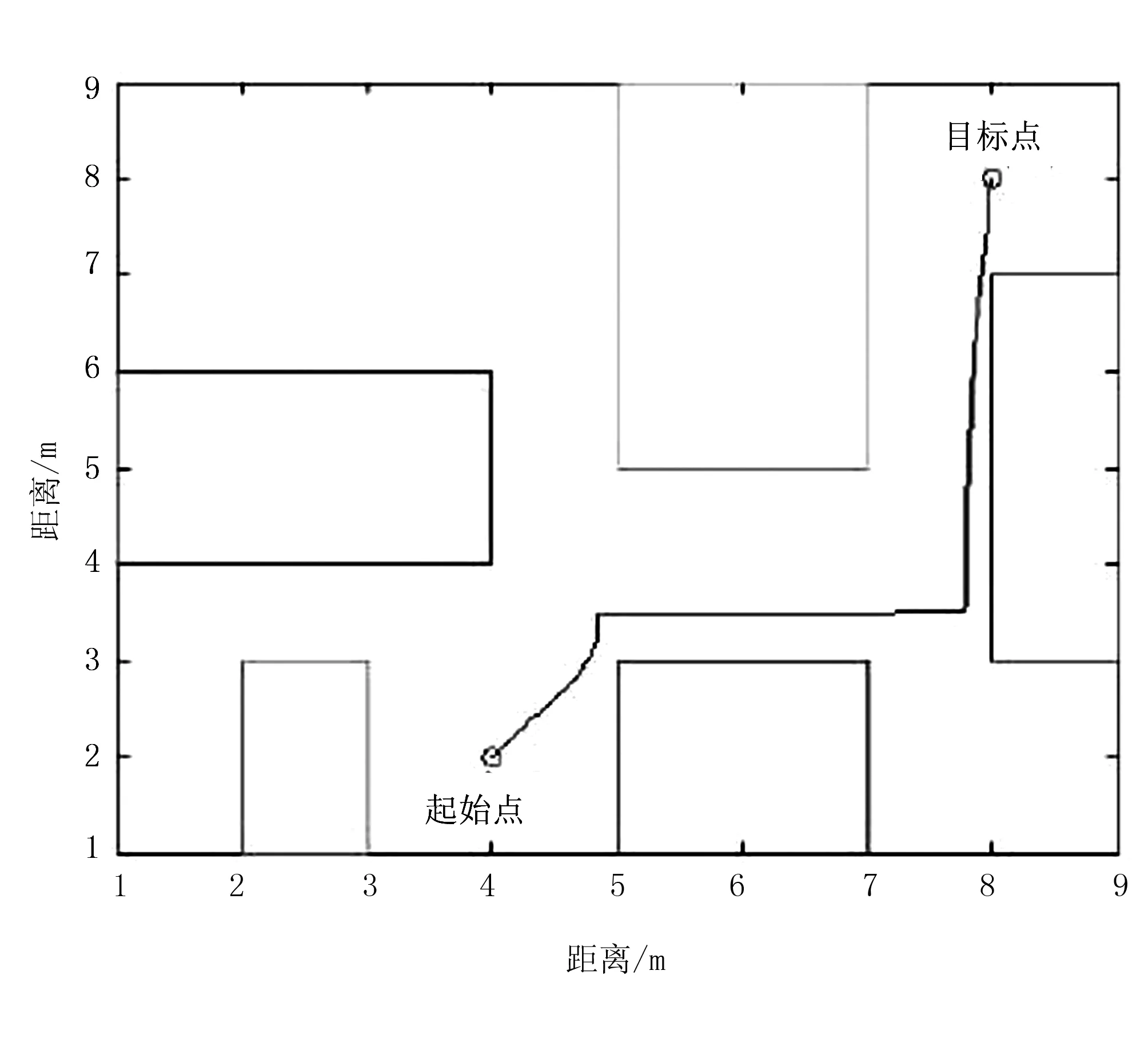
圖9 穿越障礙物軌跡規劃
圖9中共有5個障礙物,各個障礙物靠得比較近,機器人可以看作是一個質點。不同算法的誤差曲線如圖10所示。由圖10的最終收斂結果可以看出,利用FPGA和神經網絡模型可以得到滿意的結果。
為了驗證神經網絡算法的計算精度,將普通的PID控制器和神經網絡PID控制器得到的結果進行了對比,結果表明:神經網絡PID控制器得到的割草機器人控制誤差要明顯比傳統的PID控制器誤差小,從而驗證了神經網絡算法在割草機器人軌跡規劃中的優越性,可以將其在控制系統中進行應用和推廣。
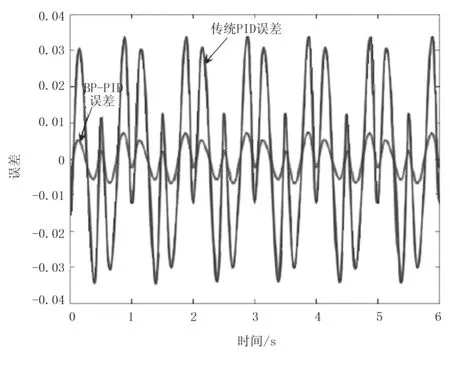
圖10 不同算法的誤差曲線
4 結論和討論
基于FPGA技術和神經網絡算法設計了一種新型的割草機器人,并采用成熟的BP算法公式,建立了割草機器人智能控制的數學模型。同時,利用FPGA構建了機器人的硬件控制系統,最后采用田間試驗和文本輸入的方式對機器人的軌跡規劃能力和控制精度進行了試驗測試。試驗結果表明:割草機器人使用FPGA和神經網絡算法后可以有效地穿越障礙物。將傳統的PID算法和神經網絡PID控制算法進行對比發現,神經網絡算法可以有效地提高控制精度。由于時間和試驗條件的限制,本研究沒有引入其他算法進行驗證。FPGA具有較強的拓撲功能,可以在其基礎上開發各種智能算法,在今后的研究中可以采用更多的智能算法對機器人進行設計,從而提高割草機器人自動控制的智能化和控制精度。
[1] 陳運鵬,龍慧,劉志杰.我國施肥技術與施肥機械的研究現狀及對策[J].農機化研究,2015,37(4):255-260.
[2] 姬江濤,鄭治華,杜蒙蒙.農業機器人的發展現狀及趨勢[J].農機化研究,2014,36(12):1-4.
[3] 喬永亮,何東鍵,趙川源,等.基于多光譜圖像和SVM的玉米田間雜草識別[J].農機化研究,2013,35(8):30-34.
[4] 姬長英,周俊.農業機械導航技術發展分析[J].農業機械學報,2014,45(9):44-54.
[5] 孟慶寬,何潔,仇瑞承,等.基于機器視覺的自然環境下作物行識別與導航線提取[J].光學學報,2014,34(7):1-7.
[6] 劉金龍,鄭澤鋒,丁為民,等.對靶噴霧紅外探測器的設計與探測距離測試[J].江蘇農業科學,2013,41 (7):368-370.
[7] 馬立新,李長樂.智能 PID 在變頻器控制系統中的應用研究[J].上海電力學院學報,2006(3):278-282.
[8] 馬立新,陳閩軒,李長樂.基于BP神經網絡的 PID 控制兩輪驅動機器人[J].自然科學研究:中文版,2007,12(4):65-72.
[9] 劉玲,王耀南.基于神經網絡和遺傳算法的移動機器人路徑規劃[J].計算機應用, 2007, 24(2):264-268.
[10] 劉金帥,賴惠成,賈振紅.基于YCbCr顏色空間和Fisher判別分析的棉花圖像分割研究[J].作物學報,2011,37(7):1274-1279.
[11] 高國琴,李明.基于 K-means 算法的溫室移動機器人導航路徑識別[J].農業工程學報,2014,30(7): 25-33.
[12] 方莉娜,楊必勝.車載激光掃描數據的結構化道路自動提取方法[J].測繪學報,2013,42(2):260-267.
[13] 熊愛武. 基于車載激光云點數據的道路模型重建[J].地理信息世界,2013,20(6):86-88.
[14] 魏澤鼎,賈俊國,王占永.基于視覺傳感器的棉花果實定位方法[J].農機化研究,2012,34(6):66-68.
[15] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012,43(3): 163-167.
[16] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12): 165-170.
[17] 李寒,王庫,曹倩,等.基于機器視覺的番茄多目標提取與匹配[J].農業工程學報,2012,28(5):168-172.
[18] 項榮,應義斌,蔣煥煜.田間環境下果蔬采摘快速識別與定位方法研究進展[J].農業機械學報,2013,44(11):208-223.
[19] 蔡健榮,孫海波,李永平,等.基于雙目立體視覺的果樹三維信息獲取與重構[J].農業機械學報,2012,43(3):153-156.
[20] 李立君,李昕,高自成,等.基于偏好免疫網絡的油茶果采摘機器人圖像識別算法[J].農業機械學報,2012,43(12):209-213.
[21] 王文慶,張濤,龔娜.基于多傳感器融合的自主移動機器人測距系統[J].計算機測量與控制,2013,21 (2):343-345.
[22] 韋偉,周凌翱,劉青.一種便攜式的紅外測距系統[J].電子設計工程,2011,19(21):40-42.
[23] 劉金龍,丁為民,鄧巍.果園對靶噴霧紅外探測系統的設計與試驗[J].江蘇農業科學,2012,40(12):370-372.
[24] 李麗,李恒,何雄奎.紅外靶標自動探測器的研制及試驗[J].農業工程學報,2012,28(12):159-162.
[25] 馬锃宏,李南,王漢斌,等.溫室株間電驅鋤草控制系統設計與試驗[J].農業機械學報,2015,46(1):89-93.
Design of Intelligent Control Trajectory FPGA and Neural Network —Based on Robot Mower
Yuan Lulu, Zhang Weiwei
(Henan Polytechnic Institute, Nanyang 473000, China)
In order to improve the accuracy and intelligence of the mowing robot autonomous navigation and localization, design a model of mowing robot based on FPGA (field programmable gate array) and the neural network algorithm, the design using FPGA reconfigurable technology, to three layer back-propagation neural network as a typical model. Using BP algorithm formula, the design of the Intelligent Robot Mower control model. By using the FPGA technology, design the hardware system of the mowing robot. Finally, the design method of the input text, using field experiment, the robot trajectory planning ability and control precision was verified. The experimental results show that using FPGA and the neural network model can effectively through five obstacles, and can get the satisfactory results of trajectory planning. Compared to the ordinary PID controller and neural network PID controller control the error, results can be seen from the, neural network PID controller of the mowing robot control error to be significantly better than the traditional PID controller error small, the method for neural network hardware implementation provides a reliable theoretical basis.
mowing robot; neural network; trajectory planning; FPGA reconstruction; PID controller
2016-01-18
河南省自然科學基金項目(2015ZCB115);南陽市科技攻關項目(2012GG029)
袁路路(1982-),女,河南南陽人,講師,碩士。
張娓娓(1985-),女,河南南陽人,助教,碩士,(E-mail)wwandll80@qq.com。
S24;TP391.41
A
1003-188X(2017)04-0212-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
光學精密工程(2016年6期)2016-11-07 09:07:19
