花生收獲機智能工況測控系統設計
2017-12-16 02:49:10趙艷華龔麗農李瑞川
農機化研究 2017年4期
關鍵詞:系統
趙艷華,龔麗農,于 艷 ,李瑞川
(1.青島農業大學 機電工程學院,山東 青島 266109;2.山東五征集團有限公司,山東 日照 262306)
?
花生收獲機智能工況測控系統設計
趙艷華1,龔麗農1,于 艷1,李瑞川2
(1.青島農業大學 機電工程學院,山東 青島 266109;2.山東五征集團有限公司,山東 日照 262306)
針對花生收獲機智能化的需求,介紹了一種花生收獲機工況檢測與控制系統的設計方案。該系統對花生收獲機工作狀況進行監測與信息反饋,可在手動和自動兩種工作模式下完成工作機構控制。其主控制器采用力士樂控制器,通過CAN總線與各工作機構檢測部件通訊,根據當前的運行模式和運行狀況做出控制決策,控制電液系統驅動的執行機構完成收獲作業。經田間試驗驗證,系統功能良好。
花生收獲機;工況;監測;智能
0 引言
我國花生機械收獲的研究雖然起步較早,但目前應用普及率仍較低,主要原因在于目前收獲機械的收獲率低、破損率高、牽引動力要求高及不適應小型地塊作業等。目前,市面上可實現挖掘、清土、鋪放等功能的小型花生收獲機無需自帶動力,結構簡單,已能夠適應農村小地塊需求,但適用于大面積作業花生聯合收獲機尚待發展。提高測控系統的智能化水平是花生聯合收獲機進一步發展的前提,也是其能夠廣泛普及的基本條件。本文所述的花生聯合收獲機智能工況測控系統采用電液系統來驅動工作部件,初步實現了聯動收獲功能,經田間試驗驗證,收獲效果良好。
1 系統構成
智能工況測控系統包括主控制器、各工作部件檢測傳感器和驅動工作部件的電液系統。花生收獲機的工作執行機構包括:扶秧器、夾持鏈、挖掘鏟、拍土器、摘果輥、振動篩、風機及升運裝置等。上述工作機構由比例閥和液壓馬達構成的電液系統驅動,系統動力由柴油發動機提供,并由發電機向蓄電池充電,提供整車24V直流電源。系統電控部分電路結構圖如圖1所示。各工作部件傳感器包括:對各部件進行驅動的液壓馬達的轉速傳感器、夾持鏈喂入量傳感器、風道內的風壓傳感器、出秧口監控攝像頭、振動篩震動傳感器及摘果輥負荷傳感器等。對馬達轉速的檢測采用EMD轉速傳感器,該傳感器信號輸出采用CAN總線接口,數據傳輸遵循CAN總線SAE J1939 CAN 2.0B通訊協議。
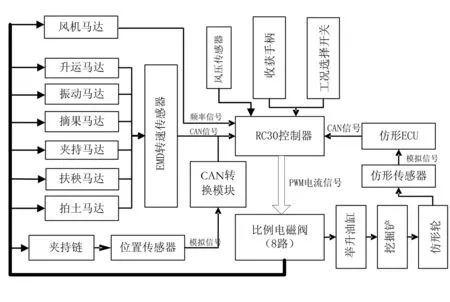
圖1 電控電路結構圖
測控系統電源由車載24V蓄電池供電,并通過控制器中的穩壓模塊,向各傳感器提供穩定的直流10V和5V電源。
2 工況測控系統方案
2.1 驅動馬達系統
驅動馬達由比例閥和液壓馬達組成,分別采用了力士樂公司的緊湊型直動式壓力補償比例電磁閥和薩奧丹佛斯公司的鋁合金齒輪馬達。
表1列出了系統中不同部位工作機構在一般工作條件下的所需功率和轉速。根據各工作機構的功率需求,確定了系統的馬達參數及型號。
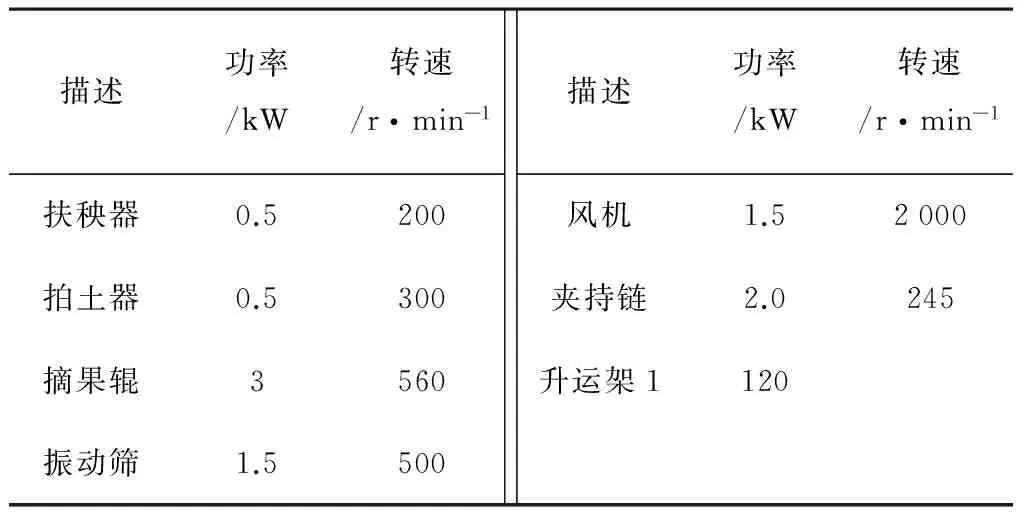
表1 常規工況下各工作機構所需功率及轉速
馬達輸出功率與輸入流量、馬達輸出扭矩與轉速之間的關系為
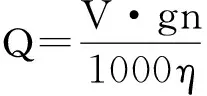
(1)
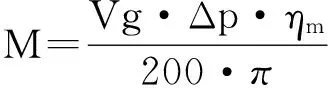
(2)
(3)
其中,Vg為每轉排量(cm3/r);po為出口壓力 (MPa);pi為入口壓力(MPa);Δp為po-pi(系統壓力)(MPa );n為轉速(r/min);ηv為容積效率;ηm為機械效率;ηt為總效率(ηv·ηm)。
依據上式和各馬達給定的參數說明,求取不同馬達的典型工作參數,如表2所示。按照工作部件的功率設計和扭矩及轉速需求,從表2中可獲得流量控制要求,作為比例閥開度控制的依據。在實驗室搭建的液壓系統平臺上,對液壓馬達和比例閥進行了測試。測試數據表明,功率、扭矩和轉速需求均能夠滿足系統設計要求。
2.2 風機測控系統
風機在風道內的風力變化趨勢直接影響秧蔓的吹送效果,因此測控系統需對花生收獲機風道內的風力進行測量,實時了解風力變化情況,以便準確驅動風機輸出功率。在風機出口(風道后部)、風道中部和秧蔓出口(前部)3處放置風速測量儀,并在風道內同一橫截面的上中下3個部分放置差壓力傳感器,以實時監測風壓。測試得到風道內風力隨風機轉速變化如表2所示。數據顯示,風機轉速在1 400~1 800r/min時,風道內獲得的風速較大。此后,風機轉速提升并不能帶來明顯的風力提升,且風壓差變大,表明風力在風道內的損耗加大。此數據可作為風機轉速控制的參考依據。
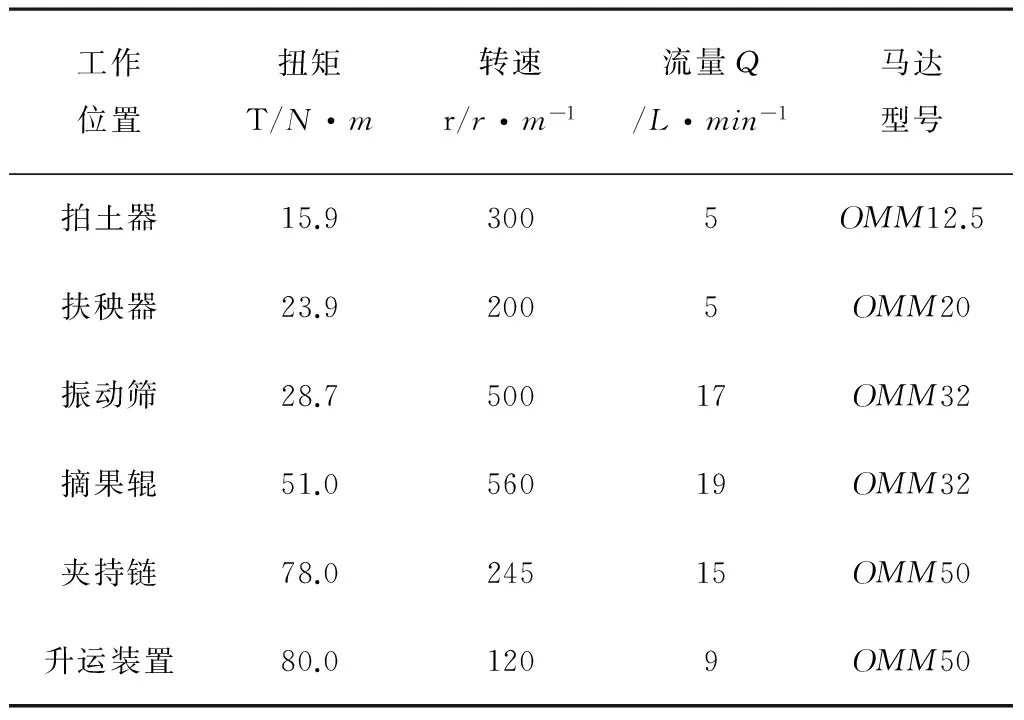
表2 各工作機構的驅動馬達常規工作狀態下的流量需求參數取值表
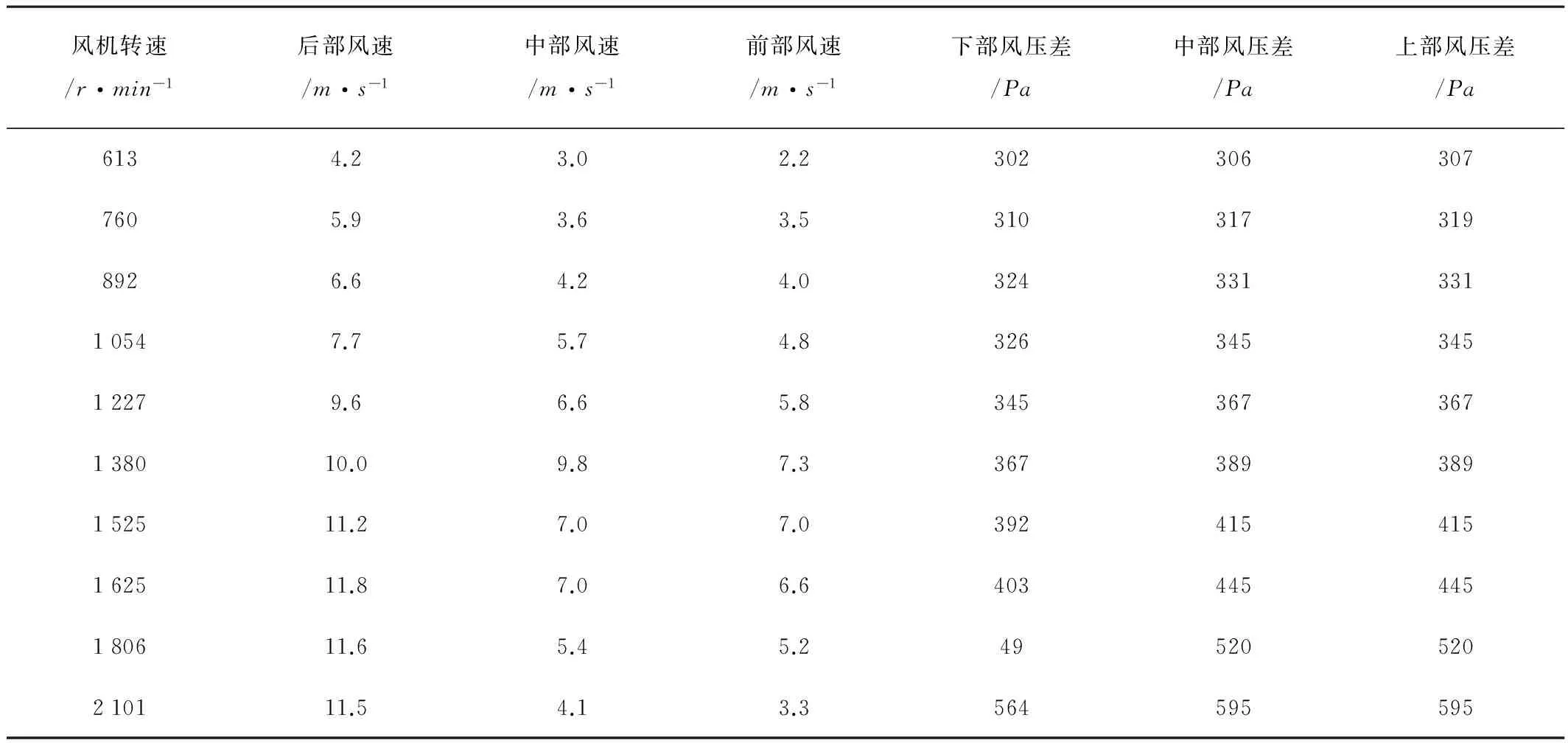
表3 風道內風機轉速與風壓實測表
為檢查測秧蔓堵塞情況,需對出秧通道的前端和末端進行風壓檢測。采用差壓力傳感器,對風壓差變送產生4~20mA儀表電流信號,經過電阻轉換成電壓信號,送到控制器的電壓采集端,轉換為數字量,進行相應處理。將風壓傳感器的兩個送風管分別安裝在風機出風口和秧蔓輸出口處。高壓側安裝在風機出口,低壓側安裝在秧蔓出口,依據兩端形成的壓差即可監測秧蔓的堵塞情況。根據實驗數據預先測定閾值,當風壓差高出閾值時,認為秧蔓開始擁堵,逐步提升風力并加強振動篩震動,以提高秧蔓輸出速度。當秧蔓持續堵塞時,則需降低夾持鏈輸運速度和收獲機挖掘速度。操作手通過視頻監控實時了解秧蔓輸出口的堵塞情況,當堵塞嚴重、難以通過機械運轉解決時,由操作手人工干預。
2.3 馬達測速系統
系統采用EMD轉速傳感器實時采集花生收獲機各馬達轉速,并將數據通過CAN總線傳輸至控制器。CAN總線通信應用層協議所規定的數據幀中,包括了幀起始位、仲裁場、控制場、數據場、CRC場、ACK場、幀結束,總計108 位,其中數據場包括8個字節。在力士樂控制器開發軟件中,提供了CAN通信的函數,能夠將數據幀中的數據場識別出來并緩存在數據盒(databox)中。不同數據盒中存放不同節點傳回的數據信息,具體節點ID值與物理位置和消息盒的對應關系如表4所示。
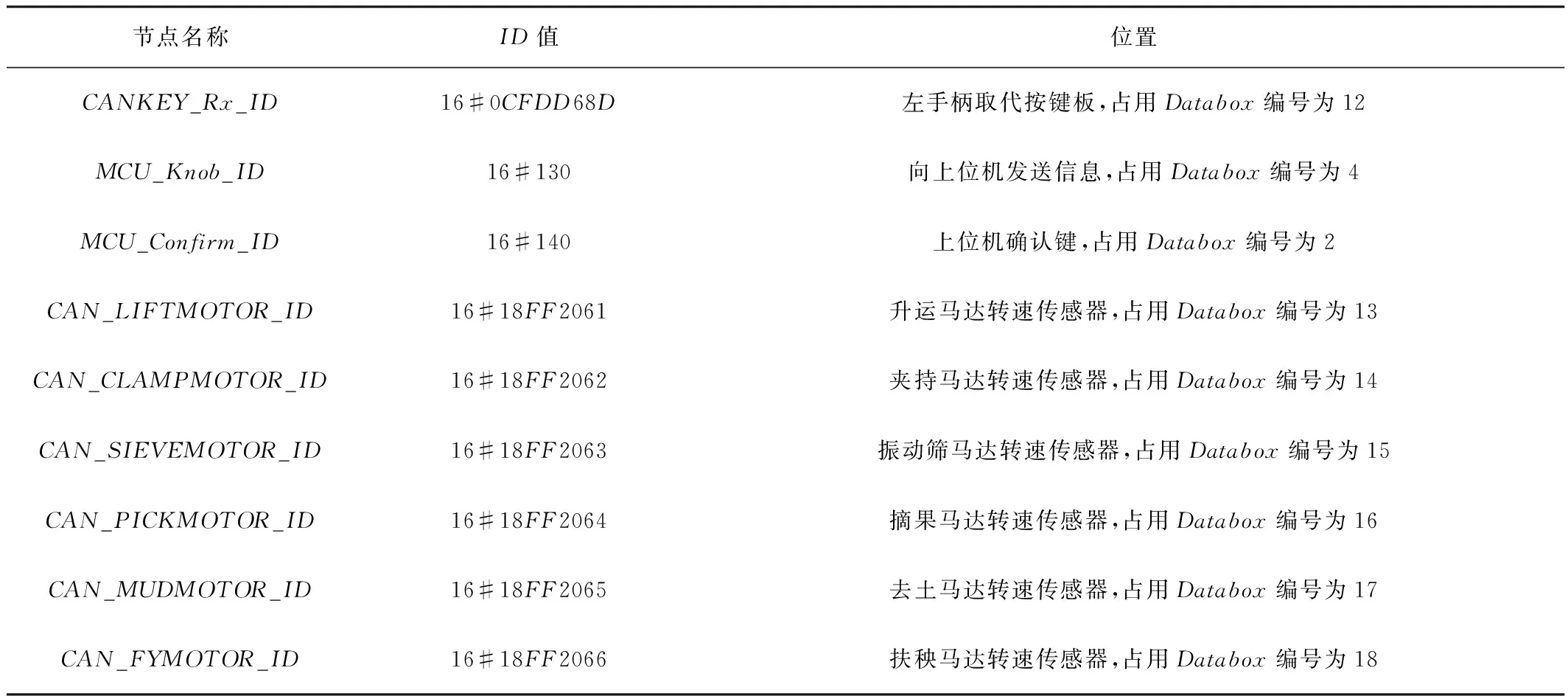
表4 CAN總線上各節點ID值對應表
2.4 挖掘鏟控制系統
挖掘鏟由液壓油缸驅動,采用2000P/R的光電編碼器對挖掘深度進行角度測量,根據轉角產生的脈沖個數確定當前的挖掘深度。將光電編碼器的兩條脈沖輸出線經CAN模塊轉換后接入控制器的CAN總線接口。挖掘鏟上下運動時,在光電編碼器上會相應產生正轉或反轉的脈沖,對脈沖個數進行計數,對應出挖掘鏟的準確位置。根據機械設計,挖掘鏟最大行程時在其支撐的轉角機構上產生的轉角是15°,光電編碼器可對應產生83個脈沖分度值。據此,可以得出挖掘鏟當前的挖掘深度,并結合夾持鏈上的夾持鏈位置、秧蔓輸送和堵塞情況,從而合理調節液壓油缸位置,達到調整挖掘鏟挖掘深度的目的。
2.5 夾持鏈堵塞測控系統
當夾持鏈上花生秧喂入量過多時,會造成堵塞,使夾持鏈無法正常運轉。在夾持鏈一側的3個等間隔位置上放置位移傳感器,用以檢測夾持鏈在夾持花生秧蔓時向外推動擴展的距離。當位移量小于1.2cm時,說明花生秧蔓量少,可繼續正常工作,按照設定標準值1驅動夾持鏈馬達運轉;當位移量為1.2~2.4cm時,說明當前花生秧蔓處于正常量值,保持當前工作狀態,按照標準值2驅動夾持鏈馬達;當位移量為2.4~3.6cm時,說明秧蔓夾持量較大,則提高夾持鏈運轉速度至高速值1;當位移量大于3.6cm時,說明當前秧蔓量過大已造成堵塞,應發出超限報警,停止夾持鏈輸運進行處理。馬達驅動時的速度調整采用PID算法進行控制。
2.6 工況控制系統
工況控制系統將花生收獲機的工作方式設置成調試狀態和工作狀態,其中工作狀態又按照不同工作模式進行劃分,如圖2所示。
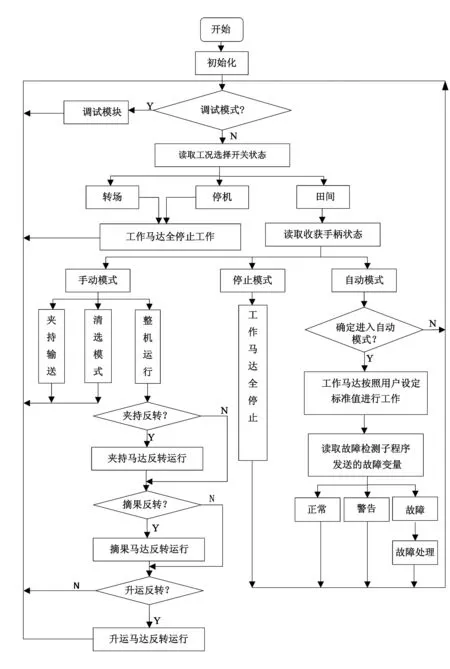
圖2 工況監測與控制主程序流程圖
為方便系統調試,設置了調試狀態,用以對系統硬件進行測試。在工作狀態,根據工況選擇開關對不同工作模式進行選擇切換。在轉場和停機模式下,各工作部件均處于停止位置;在田間模式下,根據操作手的手柄動作進行啟停控制。工作手柄啟動時,分成兩種操控模式,即手動模式和自動模式。手動模式下,可以執行部分工作機構作業的夾持輸送和清選模式,也可以執行整機運行模式;自動模式下,各工作部件按照用戶預設的標準速度值進行收獲作業。作業過程中,系統根據各個工作馬達的速度進行實時調整和故障檢測與處理。系統的各馬達驅動控制單元結合轉速信息并采用PID算法實時控制各馬達轉速,確保收獲機運行穩定。
3 整機調試與田間試驗
系統集成后,分別進行整機調試和田間試驗。整
機調試中,在調試狀態下對各個工作部件進行基本測試和部分聯調測試,為整機運行參數選取提供了依據。通過調試,解決了信號傳輸驅動不足、馬達測速不穩定、馬達流量與動力不足等問題。在充分調試的基礎上,確定了各個工作部件在不同工況下的標準運行速度。聯調完畢后,進入田間試驗。在田間試驗中,對工作部件參數進行了進一步的修正,優化了系統軟件設計,最終達到了花生收獲機的實時工況監測和智能化運轉的設計目標。
4 結論
采用工況監測與控制系統的智能化設計,可以充分提升花生收獲機械的自動化水平,有效降低人工勞動強度。配合上位機的北斗導航系統和聯合作業軟件系統,將能夠實現遠程調度、自動導航與駕駛及自動收獲等全自動控制功能。本系統設計中,主要的監測部件及操控手柄均采用CAN總線進行信息傳輸,穩定可靠。采用電磁閥控制的液壓系統,系統控制性能良好,能夠順利實現控制目標。該系統設計在我國農機裝備智能化方面具有示范意義。
[1] 尚書旗,王建剛,王方艷,等.4H-2型花生收獲機的設計原理及運動特性分析[J].農業工程學報,2005,21(1):87-91.
[2] 胡志超,陳有慶,王海鷗,等.振動篩式花生收獲機的設計與試驗[J].農業工程學報,2008,24(10):114-117.
[3] 胡彩旗,劉帥,尚書旗,等.基于ADAMS的花生收獲機清選機構運動仿真分析[J].農機化研究,2013,35(10):38-41.
[4] 孫韜,劉宗行,吳斌,等.基于CAN總線構成的分布式通信網絡的應用[J].重慶大學學報:自然科學版,2003,26(1):69-72.
[5] 尚書旗,劉曙光,梁潔,等.擺動式花生收獲機整體載荷的試驗與分析[J].農機化研究,2007(11):173-176.
[6] 趙大軍, 王延耀,楊然兵,等.4HBL-4型花生聯合收獲機懸浮式仿形機構的設計[J].農機化研究,2012,34(5):100-103.
[7] 張波屏. 播種機械設計原理[M].北京: 機械工業出版社,1982:347-348.
[8] 張利平.液壓傳動設計指南[M].北京:化學工業出版社,2009.Abstract ID:1003-188X(2017)04-0217-EA
Design of Working-condition Detecting and Controlling System for Peanut Harvester
Zhao Yanhua1, Gong Linong1, Yu Yan1, Li Ruichuan2
(1.College of Machinery and Electricity, Qingdao Agriculture University, Qingdao 266109, China; 2.Shandong Wuzheng Group Co. Ltd., Rizhao 262306, China)
To meet the need of peanut harvester intelligentization, a design scheme working-condition detecting and controlling system for peanut harvester is introduced in this paper. The system can monitor working condition of peanut harvester and feedback the information through CAN bus. The system can work in both manual and automatic control mode to accomplish the harvest work. Rexroth controller is used as the main controller, which communicate with detection components in different parts through CAN bus. According to the current operation mode and operation condition, the controller makes decisions to control actuator which is driven by electro-hydraulic system to complete harvest task. System function is tested by field experiment and proved to be good.
peanut harvester; working condition; detecting; intelligent
2016-04-01
山東省重點研發計劃項目(2015GNC112013) ;山東省自主創新專項(2013CXC90205-4)
趙艷華 (1977-),女,遼寧朝陽人,講師,碩士,(E-mail)zyh3398@163.com。
龔麗農(1963-),女,上海人,教授,碩士生導師,(E-mail)gln2135@163.com。
S225.7+3;S24
A
1003-188X(2017)04-0217-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
