機采棉清雜系統的釘床式荷電裝置與試驗
2017-12-16 09:15:47張洪洲鄒樂樂范非凡劉媛杰
農機化研究 2017年5期
張洪洲,鄒樂樂,范非凡,李 勇,劉媛杰
(塔里木大學 機械電氣化工程學院,新疆 阿拉爾 843300)
?
機采棉清雜系統的釘床式荷電裝置與試驗
張洪洲,鄒樂樂,范非凡,李 勇,劉媛杰
(塔里木大學 機械電氣化工程學院,新疆 阿拉爾 843300)
針對機采籽棉清雜工序中荷電效果不佳的現實問題,提出了一種釘床式荷電方法。以MCU為主控制單元,設計了一款釘床式荷電控制系統。在荷電極板面上均勻分布且垂直于極板面的長度為5cm的金屬釘,控制器控制靜電發生器產生高壓靜電,通過荷電極板上的金屬釘放電,將平鋪在極板間的機采棉荷電。試驗結果表明:與無金屬釘的荷電極板相比,機采棉荷電均勻,荷電速度提高了8%,效果良好。該研究可為機采棉靜電清雜應用提供參考。
機采棉;清雜;釘床;荷電
0 引言
隨著新疆生產建設兵團籽棉種植面積逐年增加,手工采摘已經不能滿足需求,因而采棉機被廣泛的應用[1-4],機械采摘面積逐年增加。在采摘環節效率提高的同時[5-6],機采棉的雜質含量高而且清雜效果不佳的問題也隨之顯現[2-4]。現有的機采棉除雜清選機大多是鼓風式、振動式等機械清雜[7-9],機采棉靜電清雜方面的應用和研究相對較少,在靜電清雜過程中機采棉的荷電是整個清雜過程中的重要組成部分。機采棉荷電的效果直接影響到靜電清雜的效果[2-3,10-12]。機采棉荷電裝置是集荷電與控制一體的,要求機采棉荷電均勻、精度高、可控性強及魯棒性強。原有的荷電裝置只是在兩個極板上通高壓直流電[13-14],使分布在下極板上的機采棉電化,從而達到荷電的效果,功能簡單、不易控制、精度低、荷電效果不佳。利用釘床式荷電裝置,能較好地解決傳統荷電裝置的不足,還可減小不必要的電能損失。另外,采用中央控制單元集中控制,實現了實時在線控制,滿足了清雜設備對機采棉的清雜需要。
本文著重介紹一個采用釘床方式的機采棉荷電系統,對于改進現有的機采棉靜電清雜的荷電不足之處,促進機采棉清雜系統的自動化發展有重要的意義。
1 釘床式荷電裝置構成及工作原理
1.1 設計思路
機采棉電磁清雜工序之前,需要對待清雜的機采棉進行預處理,即在高壓直流電作用下使機采棉進行荷電工作。機采棉荷電工作要求機采棉荷電均勻,荷電時間短,快速達到荷電飽和狀態。通過對荷電極板的改進,使其中一塊極板均勻分布固定的金屬釘,通過控制電路,利用輸送帶速度控制模塊、自動刮平模塊、釘板控制模塊、電源模塊及顯示模塊等,設計了一個通過金屬釘均勻放電的床式機采棉荷電控制系統。
1.2 清雜裝置設計原理
本文針對傳統的機采棉荷電時間長、荷電不均勻的弱點,設計出了以51單片機和PID控制方法的釘床式荷電系統設計的方案。該系統由STC單片機、輸送帶速度控制模塊、自動刮平模塊、釘板控制模塊、電源模塊及顯示模塊等部分組成,控制系統框圖如圖1所示。設備啟動,電機低速轉動帶動輸送帶運行,從喂料口將待荷電的機采棉送至荷電區;同時,安裝在輸送帶兩側刮板將機采棉刮平,使機采棉均勻分布在輸送帶上,輸送帶上的機采棉完全進入荷電區,傳送帶停止運行;STC單片機做出決策,控制步進電機,使釘床極板下降,直至釘床上的釘子和棉花充分接觸,步進電機停止運行;MCU控制高壓發生器,使荷電極板達到35kV的直流高壓,開始荷電,待荷電完成后,MCU控制步進電機使釘床極板升起,直流電機運行,輸送帶將荷電后的機采棉送入下一道工序的設備。

圖1 系統框圖
2 控制單元及軟件設計
2.1 各控制模塊設計
中央處理單元選用51系列通用的STC系列的89C58,該款單片機內部有20kB的閃存,1 280B的隨機存儲器,16kB的程序存儲器,能夠滿足荷電裝置控制的需要[15]。輸送帶電機選用型號為57BL-1030H1-LS-B,升降電機選用步進電機35BYG250C-0081,顯示模塊采用16×8點陣字符的LCD12864液晶顯示,電源采用直流交流混合供電電源。
2.2 軟件設計
設備上電時,從行列式鍵盤輸入閾值電壓的期望值和步進電壓作為輸入量,單片機控制輸送帶電機低速旋轉,從喂料口將待荷電的機采棉送至荷電區;同時,安裝在輸送帶兩側刮板將機采棉刮平,使機采棉均勻分布在輸送帶上,輸送帶上的機采棉完全進入荷電區,傳送帶停止運行。檢測模塊初始化并開始采集釘床極板實際測出的電壓值,將測得的電壓值經變送器變送和歸一化處理后,作為控制系統的反饋值;輸入的期望值與反饋值產生一個控制系統偏差量,偏差量值經信號放大、積分和微分處理后,經單片機送入高壓發生器模塊環節,根據處理后的矢量值,通過單片機做出相應的決策來控制高壓發生裝置;高壓發生裝置產生高電壓,最后作用于釘床極板;同時,51單片機將測得的實測值和鍵入的期望值,送至液晶顯示屏,實現了數據的實時顯示。
根據荷電裝置實際運行情況的要求,給定電壓的步進量與實際電壓的步進量之差為誤差e及其誤差變化率ec的選取范圍為e∈[0,0.9],ec∈[-4.60,0]。將e和ec兩個參量經模糊控制的模糊化處理后,分別得到模糊語言變量E和EC,這兩個語言變量的模糊集合均為{ 負大,負中,負小,零,正小,正中,正大},論域均為{ -9,-6,-3,0,3,6,9}。兩集合的隸屬函數均選擇三角形隸屬度函數。
模糊PID選用的模糊控制規則語句為“if E is ? and EC is β,then U is γ ”。其中,?、β、γ為各變量參數所對應的模糊子集。根據前人的經驗數據庫和相應的認知處理后,得到49條模糊PID控制規則,如表1 所示。
模糊PID控制器各個變量參數選取: 通過計算給定高壓的步進量與實際電壓步進量的誤差e和誤差變化率ec,e和ec通過模糊化、模糊推理及模糊清晰化得到PID控制器3個參數:比例系數增量ΔKP、積分系數增量ΔKi、微分系數增量ΔKd;與當前時刻PID控制器參數初值相疊加,得到下一時刻的PID控制器的參變量,得以實現PID 參數KP、Ki和Kd的在線自動調整。利用模糊函數計算求出PID3個參數的增量KP、Ki、Kd。本文所設計的控制系統在前人長期實踐積累的經驗知識的基礎上建立相應的模糊規則表,如表1~表4所示。
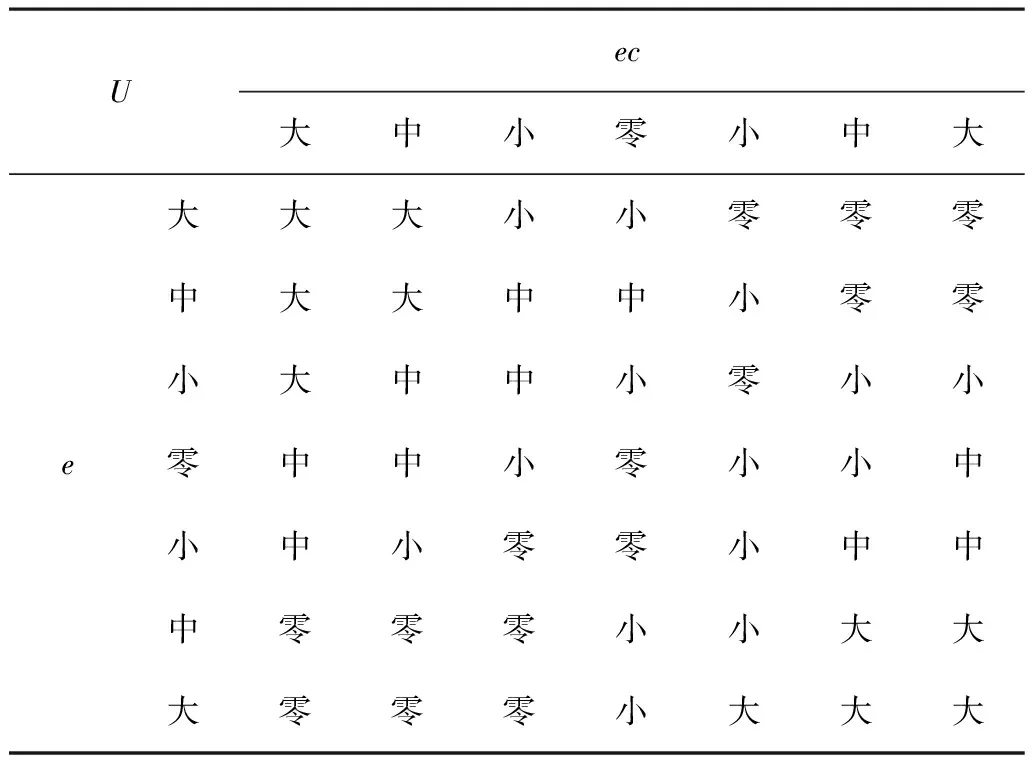
表1 控制規則表
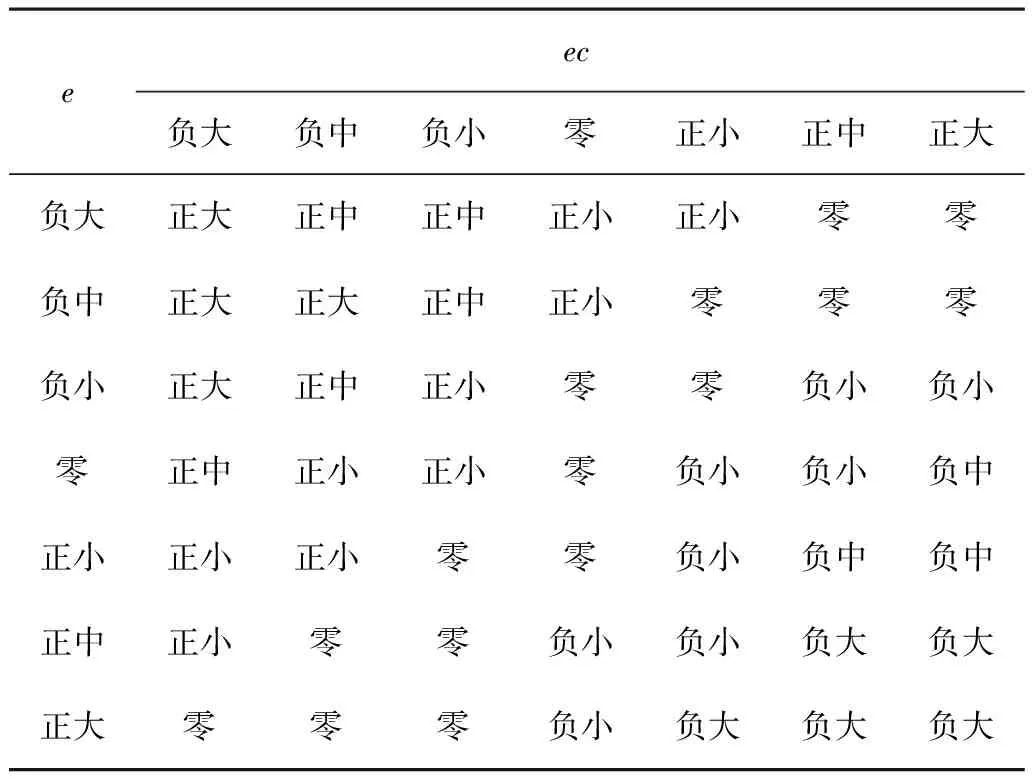
表2 比例增益增量模糊控制規則表
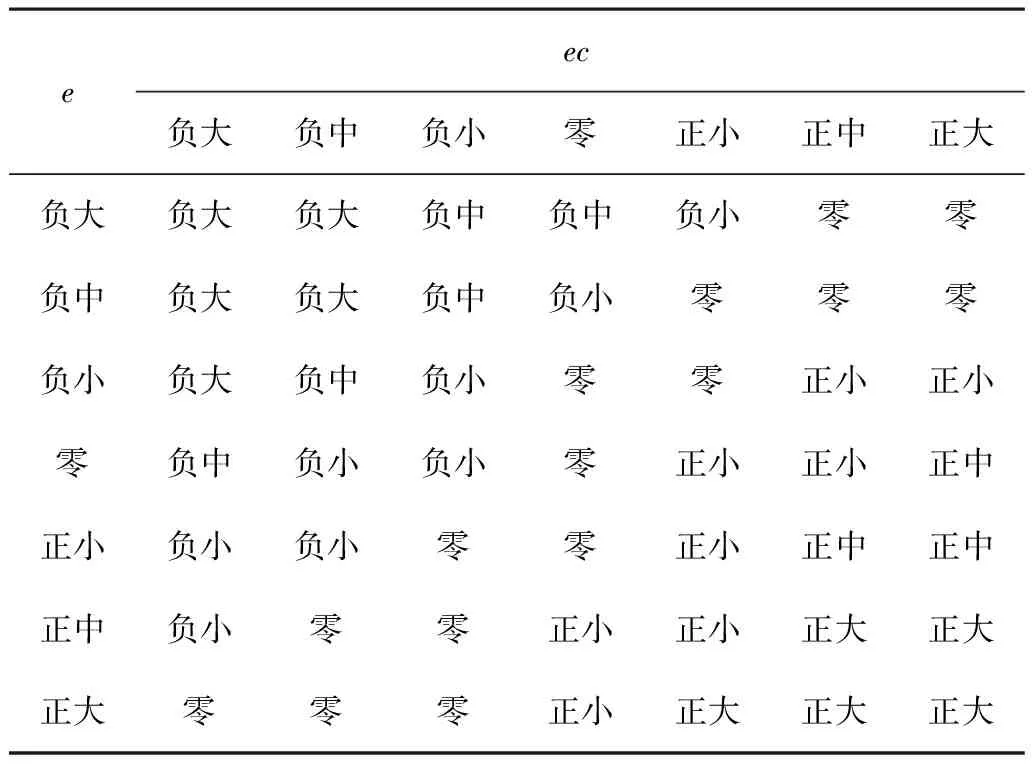
表3 積分增益增量模糊控制規則表
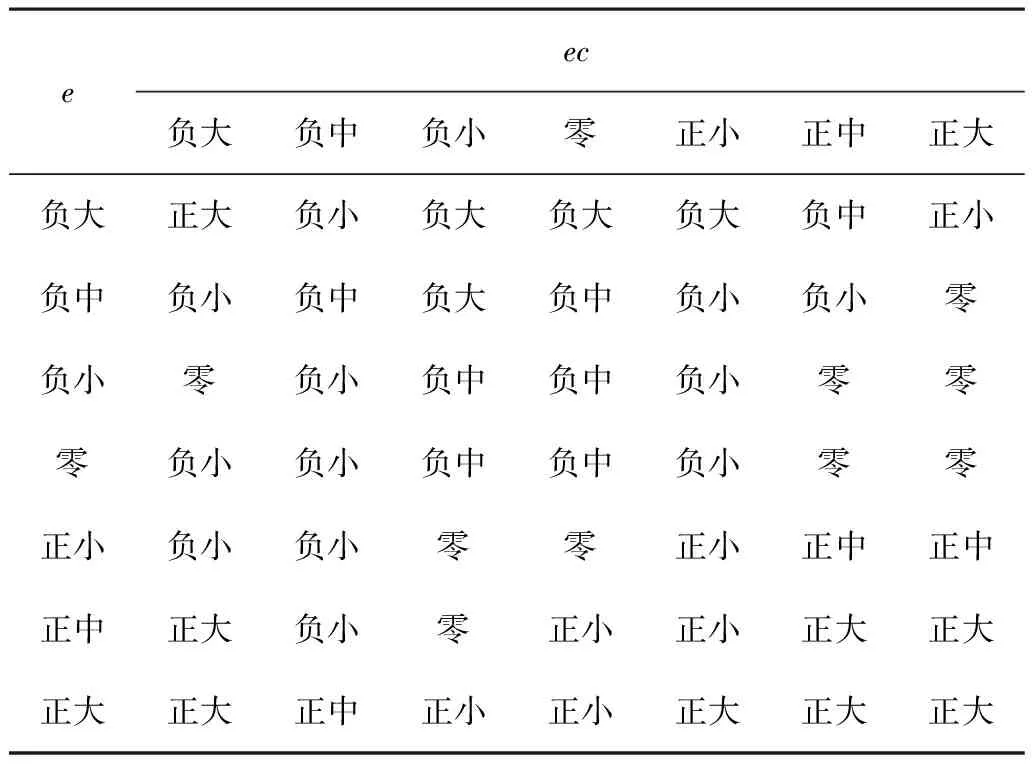
表4 微分增益增量模糊控制規則表
用匯編語言編程實現控制,在QX-mini51開發板上進行實物仿真,對軟硬件各參數進行調試,直至輸出達到期望值為止,直流高壓發生控制程序流程圖如圖2所示。初始化程序代碼如下:
ORG 0000H
MOV R0,#5
QD:JNB P3.0,MAIN
AJMP QD
MAIN:MOV A,R0
MOV DPTR,#TAB
MOVC A,@A+DPTR
SETB P1.0
ACALL DEL
MOV A,R0
MOV DPTR,#TAB1
MOVC A,@A+DPTR
CLR P1.0
ACALL DEL
JNB P3.1,K1
則稱算法A滿足ε-差分隱私.其中,Pr[.]表示隱私被披露的概率,它是由算法A的隨機性所控制(與攻擊者的背景知識無關);ε是隱私保護參數,表示隱私保護的力度,ε越小意味著隱私保護力度越強.定義3本質上刻畫了基于隨機算法A輸出的兩個相鄰矩陣的不可分程度.
JNB P3.2,K2
JNB P3.3,K3
AJMP MAIN
K1:CJNE R0,#8,K11
AJMP MAIN
K11:INC R0
AJMP MAIN
K2:MOV A,R0
DEC R0
AJMP MAIN
K3:CLR P1.0
AJMP QD
TAB:DB 01H,02H,03H,04H,05H,06H,07H,08H,09H
TAB1:DB 09H,08H,07H,06H,05H,04H,03H,02H,01H
DEL:MOV R7,A
DEL0:MOV R6,#0
DJNZ R6,$
DJNZ R7,DEL0
RET
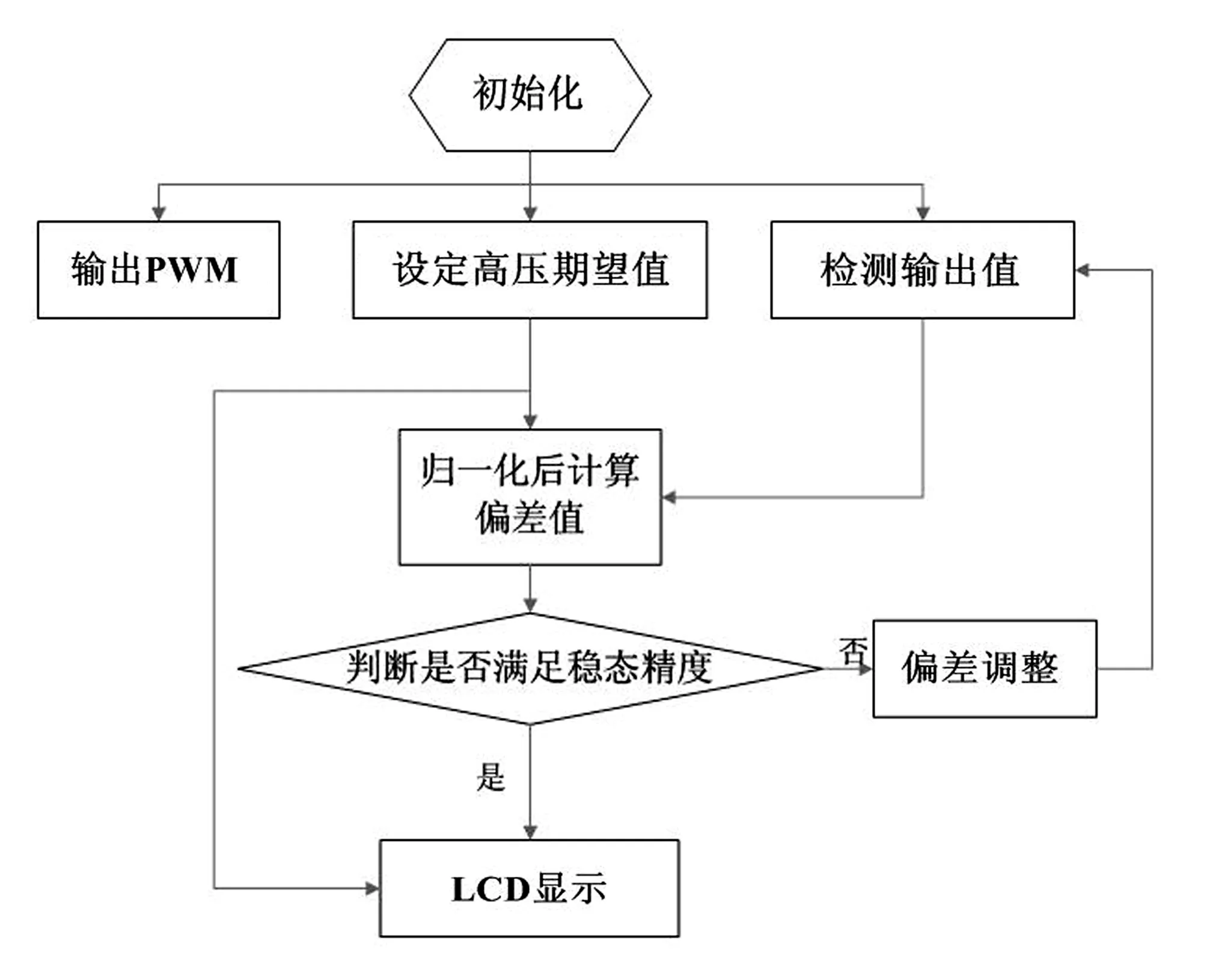
圖2 直流高壓發生控制程序流程圖
3 試驗與分析
取機采棉600kg,分成24等份,將24等份再分成兩組。其中,一組進行原始的平板荷電系統試驗,領機組進行釘床式荷電,步進電壓均為1、2kV,閾值電壓均為35、45、55、60kV,達到最大閾值電壓的時間為Tr,進行組合試驗,每組試驗做3次,記錄達到著火點時的荷電時間Ts0和Ts1,取平均值。試驗結果如表5所示。
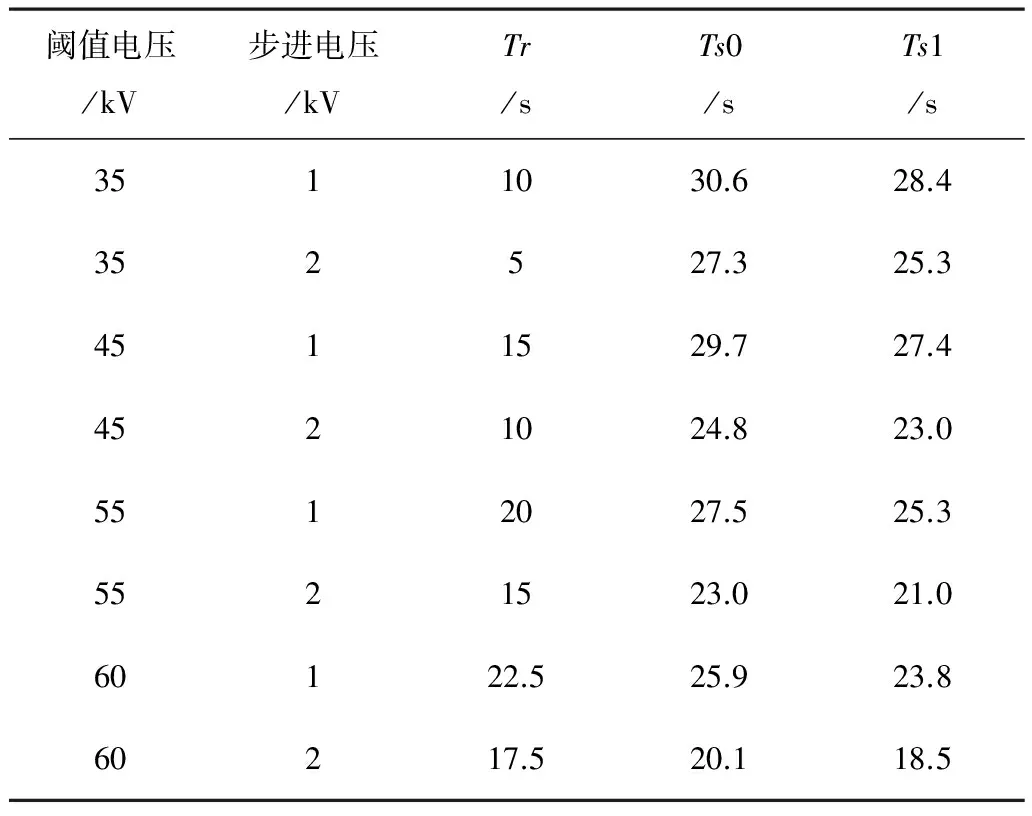
表5 兩種方法機采棉荷電指標數據
試驗表明:閾值電壓為35kV、步進電壓為1kV時,原始方法達到著火點時荷電時間為30.6s,釘床式荷電系統達到著火點時荷電時間為28.4s,閾值電壓為60kV,步進電壓為2kV時,兩種方法達到著火點時荷電時間為20.1、18.5s;隨著閾值電壓,步進電壓的增大,Ts越小;釘床式荷電系統荷電比原始方法速度提高了8%。
4 結論
本文設計的釘床式機采籽棉除雜荷電裝置,穩定性強、精度高、速度快,大大提高了機采棉荷電效率,可以滿足機采棉電磁除雜的荷電要求。
[1] 郭淑霞,坎雜,張若宇,等.機采籽棉殘膜靜電分離裝置分離試驗[J].農業工程學報,2011,27(S2):6-11.
[2] 張洪洲.南疆機采棉除雜現狀分析及發展趨勢探究[J].農機化研究, 2015,37(1):242-245.
[3] 張洪洲,張風旗,張亞江,等.機采棉荷電系統優化控制[J].江蘇農業科學, 2014,42(7):409-410.
[4] 張洪洲,張亞江,張風旗,等.基于單片機的機采棉除雜系統優化喂料控制[J].江蘇農業科學, 2014,42(6):387-388.
[5] 張洪洲,白建國,張風旗,等.機采棉除雜機的穩壓電源設計與試驗[J].江蘇農業科學, 2014,42(12):448-449.
[6] 李碧丹,丁天懷,郟東耀.皮棉異性纖維剔除系統設計[J].農業機械學報,2006,37(1):107-110.
[7] 趙海軍,史建新.殘膜回收工藝探討[J].中國農機化,2004(6):68-71.
[8] 汪海濤,朱邦太,李勛.基于機器視覺技術的棉紡異性清除系統[J].河南科技大學學報:自然科學版,2009, 3(1):14-17.
[9] 周功明,周陳琛.基于AT89S51 單片機的數控電源設計[J].綿陽師范學院學報,2012,31(5):18-23.
[10] 朱貴憲.基于單片機的數控穩壓電源設計[J].自動化與儀表,2011(6):50-53.
[11] 祝敏.直流數控可調穩壓電源的設計[J].電子元器件應用,2008,10(4):62-64.
[12] 許艷惠.一種智能化高精度數控直流電源的設計與實現[J].微計算機信息,2007,32(11-2):136-138.
[13] 鄧堅,楊燕翔,齊剛.數控直流穩壓電源設計[J].計算機測量與控制,2007(12):1991-1993.
[14] 赫建國,鄭燕,薛延霞.單片機在電子電路設計中的應用[M].北京:清華大學出版社,2006.
[15] 蔡振江.單片機原理及應用[M].北京:電子工業出版社, 2011.
Design and Experiment of the Type Bed of Nails of Charged Equipment of Machine-harvested Cotton
Zhang Hongzhou, Zou Lele, Fan Feifan, Li Yong, Liu Yuanjie
(College of Mechanic and Electrical Engineering,Tarim University, Alaer 843300,China)
Aiming at the problem of real machine harvested cotton cleaning process of charging effect, put forward a type of nail bed charge method.With MCU as the main control unit, the design of a nail bed type charge control system. In the bearing surface of an electrode plate of the uniform distribution and the vertical plate surface has a length of 5cm metal nail, the controller controls the electrostatic generator to generate a high-voltage electrostatic, through pin bearing electrode plate metal discharge, will tile the plate between the machine pick up cotton charged; test results show that compared and no metal nail charged plate, machine pick up cotton charged uniformly, charging speed increased by 8%, the effect is good; the study can machine pick up cotton electrostatic cleaning can be used as a reference.
machine-harvested cotton; impurities; bed of nails; charge
2016-04-10
國家自然科學基金項目(61534005;11242012)
張洪洲(1982-),男,長春人,副教授,碩士,(E-mail)309011160@qq.com。
劉媛杰(1982-),女,陜西府谷人,講師,(E-mail)49948298@qq.com。
S225.91+1
A
1003-188X(2017)05-0118-04
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
