薰衣草收割機(jī)切割高度可調(diào)節(jié)機(jī)構(gòu)的設(shè)計(jì)及運(yùn)動(dòng)仿真
2017-12-16 09:15:51田東洋劉姣娣李衛(wèi)敏
農(nóng)機(jī)化研究 2017年5期
田東洋,劉姣娣,李衛(wèi)敏
(石河子大學(xué) 機(jī)械電氣工程學(xué)院,新疆 石河子 832000)
?
薰衣草收割機(jī)切割高度可調(diào)節(jié)機(jī)構(gòu)的設(shè)計(jì)及運(yùn)動(dòng)仿真
田東洋,劉姣娣,李衛(wèi)敏
(石河子大學(xué) 機(jī)械電氣工程學(xué)院,新疆 石河子 832000)
薰衣草生長期長達(dá)十幾年,長期農(nóng)機(jī)入地作業(yè)造成了地面高低不平,既要花穗收割干凈,同時(shí)不能傷害保留的莖稈,確保薰衣草后續(xù)的生長。為此,設(shè)計(jì)了高度可調(diào)節(jié)機(jī)構(gòu)使薰衣草切割后的莖稈保留高度一致。同時(shí),對(duì)仿形機(jī)構(gòu)進(jìn)行了受力分析,確定了影響仿形性能的初始作用角度α、上仿形角α1、連桿長度L1。根據(jù)初始工作角和最大下仿形量,設(shè)計(jì)出的仿形桿長度為 440mm,最大上仿形量為 214mm。最后,應(yīng)用仿真分析軟件Adams進(jìn)行運(yùn)動(dòng)模擬,結(jié)果表明:仿形機(jī)構(gòu)可實(shí)現(xiàn)上下仿形和翻轉(zhuǎn),上下仿形量可達(dá)到290 mm,翻轉(zhuǎn)角度達(dá)到90°,滿足薰衣草收割機(jī)的切割仿形量。該機(jī)構(gòu)為研制薰衣草收獲機(jī)的研制提供了依據(jù)。
薰衣草收割機(jī);切割裝置;仿形;運(yùn)動(dòng)仿真
0 引言
薰衣草屬于無性繁殖,一般采用3~4年生植株作為母株,于秋天植株停止生長后或早春植株萌動(dòng)前,將母株地上部分的枝條距地面80~100mm剪去(如圖1中a),然后堆擁肥土使枝子稍露出土面,如圖1所示[7]。這一生長狀況,造成地面不平整,而目前的收割機(jī)械,并不適用于收割薰衣草。長年的人工收割及機(jī)器進(jìn)地作業(yè)也造成了地面的不平整。薰衣草的采花部位過高,有花收不回來,會(huì)減少產(chǎn)花量,造成浪費(fèi);剪切部位過低,會(huì)影響薰衣草植株的生長。這就要求收割后的薰衣草莖稈高度保持一致性,且能達(dá)到最低高度要求。平行四桿仿形機(jī)構(gòu)是一種可以根據(jù)地形調(diào)節(jié)作業(yè)高度的機(jī)構(gòu):崔濤[1]等設(shè)計(jì)了平行四桿機(jī)構(gòu),實(shí)現(xiàn)同位仿形;趙淑紅[2]等設(shè)計(jì)的平行四桿機(jī)構(gòu)能實(shí)現(xiàn)上下和左右雙向仿形。
薰衣草生長在壟臺(tái)上,至成熟期采收時(shí)間緊迫。每年大規(guī)模采收兩次,夏花一般在6月下旬至7月中旬,秋花在9月下旬至10月上旬。由于盛花期短,過早或過晚采收都會(huì)影響薰衣草品質(zhì)。因此,采用機(jī)械收割以提高采收效率,且使收割過程中收割高度一致。本文根據(jù)國內(nèi)薰衣草種植模式,采用一種側(cè)懸掛于拖拉機(jī)上的收割裝置,設(shè)計(jì)一種固定于拖拉機(jī)一側(cè)的調(diào)節(jié)高度的三液壓活塞桿仿形機(jī)構(gòu)。該機(jī)構(gòu)能人為適時(shí)調(diào)節(jié)收割裝置距離地面的高度,完成薰衣草的收割,也能在收割裝置不工作時(shí)使其向上翻轉(zhuǎn),便于拖拉機(jī)行走。
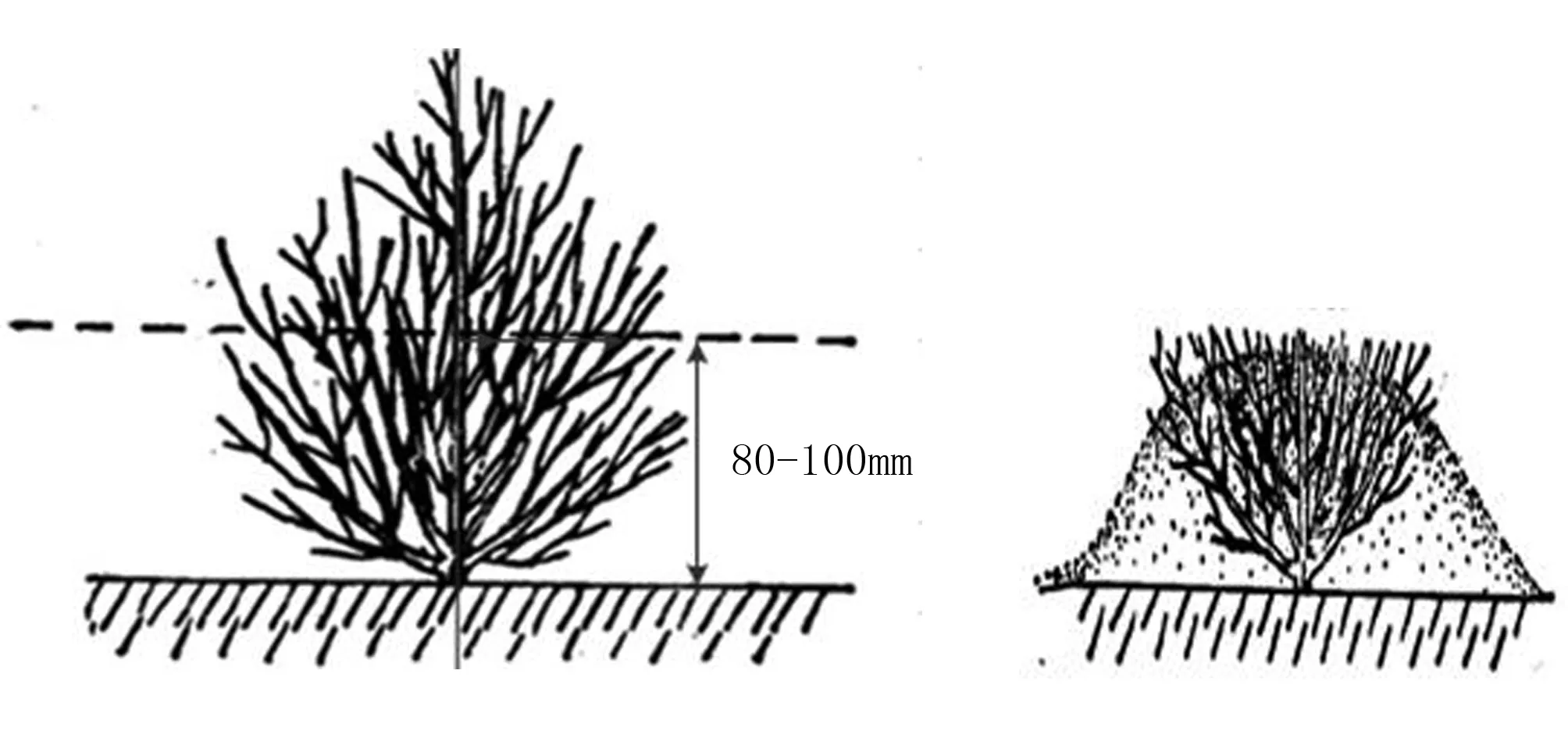
(a) 剪枝 (b) 堆擁肥土
1 整機(jī)工作原理及機(jī)構(gòu)設(shè)計(jì)
1.1 工作原理
整個(gè)收割裝置側(cè)懸掛于拖拉機(jī)一側(cè),仿形機(jī)構(gòu)連接拖拉機(jī)和收割機(jī)割臺(tái)。拖拉機(jī)前進(jìn)時(shí),液壓馬達(dá)轉(zhuǎn)動(dòng),帶動(dòng)往復(fù)式切割器工作,往復(fù)式切割器上方的皮帶鏈也由液壓馬達(dá)帶動(dòng);轉(zhuǎn)動(dòng)中的皮帶鏈能收攏薰衣草,往復(fù)式切割器切割薰衣草,切掉的薰衣草由傳送裝置進(jìn)行輸送,如圖2所示。
1.2 仿形機(jī)構(gòu)
仿形機(jī)構(gòu)主要由主臂活塞桿、輔臂活塞桿及連桿組成[3],如圖3所示。左邊連接架與切割臺(tái)部分成為一體,右邊連接架固定于拖拉機(jī)上;主臂活塞桿通過軸銷與左右連接架分別鉸接于F點(diǎn)和E點(diǎn),兩個(gè)輔臂活塞桿與連接架鉸接于A點(diǎn)、B點(diǎn)、C點(diǎn)、D點(diǎn)[4];兩連桿與連接架為鉸接。工作過程中,液壓控制主、輔臂活塞桿,兩主臂活塞桿繞A、D點(diǎn)轉(zhuǎn)動(dòng),輔臂活塞桿繞E點(diǎn)轉(zhuǎn)動(dòng),兩連桿繞H、K點(diǎn)轉(zhuǎn)動(dòng);收割工作臺(tái)可向上或者向下移動(dòng),從而調(diào)整距離地面的高度;當(dāng)輔臂活塞桿不動(dòng),兩主臂活塞桿工作時(shí),可調(diào)整收割臺(tái)與地面所成角度,即整個(gè)收割裝置可進(jìn)行翻轉(zhuǎn)。
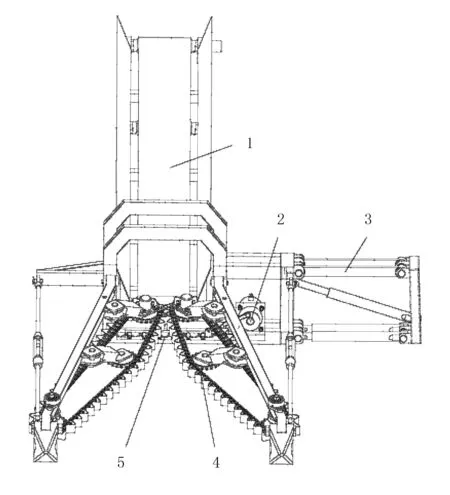
1.傳送裝置 2.液壓馬達(dá) 3.仿形機(jī)構(gòu) 4.皮帶鏈 5.往復(fù)式切割器
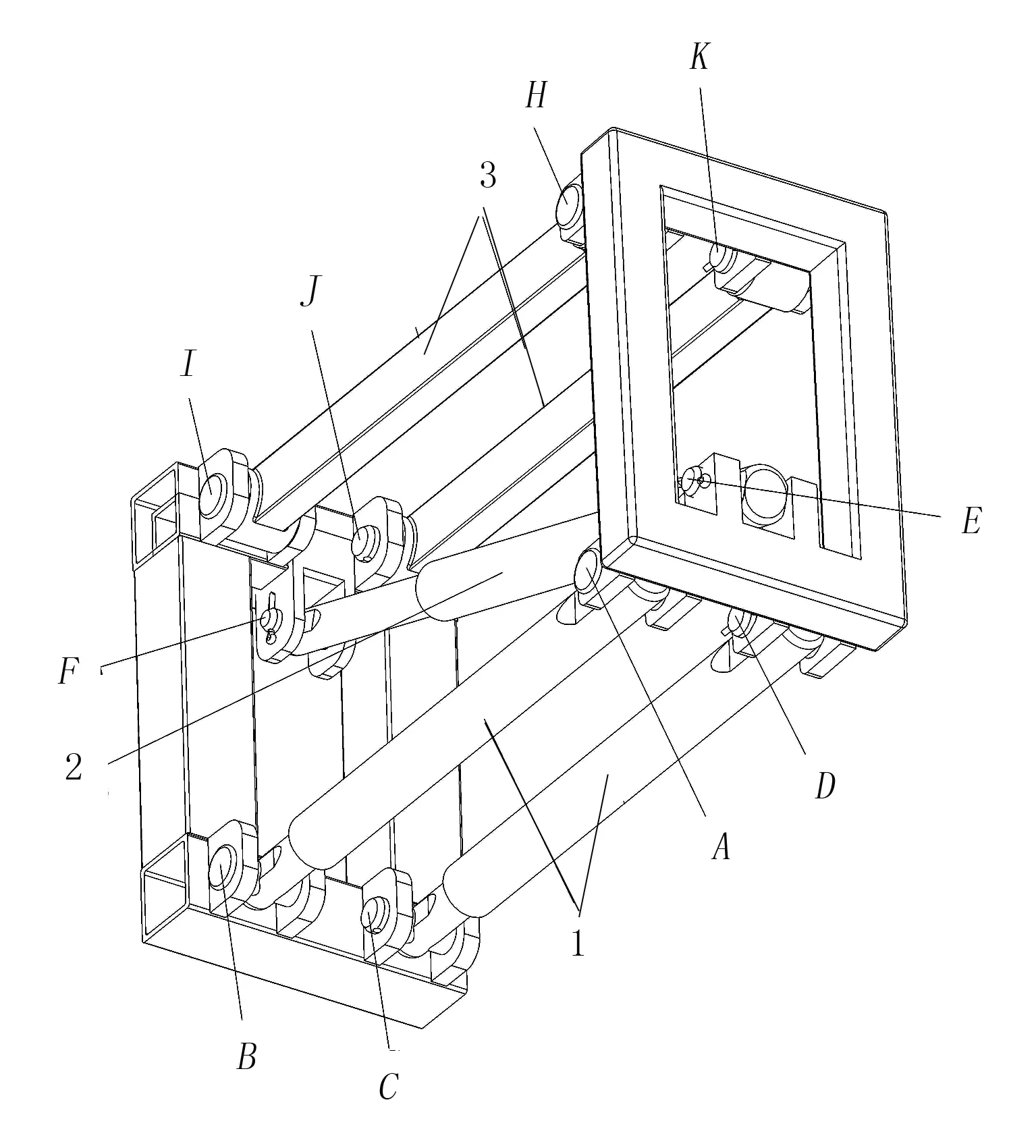
1.主臂活塞桿 2.輔臂活塞桿 3.連桿
2 仿形機(jī)構(gòu)的受力分析
為探究仿形機(jī)構(gòu)施加的作用力與整個(gè)裝置的質(zhì)量之間的關(guān)系,現(xiàn)對(duì)其進(jìn)行受力分析,找出各參數(shù)變化的影響。
2.1 上下仿形時(shí)受力分析
仿形機(jī)構(gòu)受力分析如圖4所示。
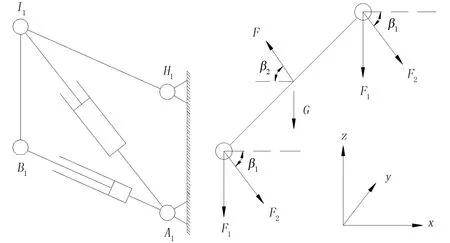
(a) 仿形機(jī)構(gòu)簡(jiǎn)圖 (b) IJ桿空間受力圖
當(dāng)輔臂活塞桿施加作用力而主臂活塞桿作為連桿用時(shí),可使I1B1桿上下移動(dòng),即收割裝置離地面的距離可實(shí)現(xiàn)上下調(diào)整。對(duì)IJ桿進(jìn)行受力分析,如圖3(b)所示。由在xy平面上穩(wěn)定工作的受力平衡條件可得
Fsinβ2-2F1-2F2sinβ1-G=0
(1)
Fcosβ2-2F2cosβ1=0
(2)
令I(lǐng)J桿長為a,由力矩平衡可得
(3)
由式(1)、式(2)、式(3)可得
(4)
式(4)中:β1為IH桿、JK桿在運(yùn)動(dòng)過程中與地面所成的夾角;β2為EF桿所代表的輔臂活塞桿在運(yùn)動(dòng)過程中與地面所成的夾角;F為輔臂活塞桿對(duì)IJ桿施加的作用力;F1為IB桿、JC桿分別對(duì)IJ桿的作用力;F2為IH桿、JK桿分別對(duì)IJ桿的作用力;G為整個(gè)側(cè)懸掛裝置對(duì)IJ桿施加的重力。
由式(4)知:輔臂活塞桿所要施加的力F,主要與β2、G有關(guān)。當(dāng)β2緩慢變大時(shí),F(xiàn)也隨之增大;反之,F(xiàn)變小。當(dāng)G變大時(shí),F(xiàn)也隨之增大;反之,F(xiàn)變小。另外,F(xiàn)還與角β2、β1之差有關(guān),差越大,F(xiàn)越小;差越小,F(xiàn)越大。當(dāng)G一定時(shí),F(xiàn)1變化不大,在整個(gè)裝置上升過程中,β2變大,角β2、β1之差變小,F(xiàn)相應(yīng)變大,即整個(gè)側(cè)懸掛裝置在上升過程中,所要施加的作用力不斷變大。
2.2 側(cè)懸掛裝置翻轉(zhuǎn)時(shí)受力分析
薰衣草收割結(jié)束或不工作時(shí),該機(jī)構(gòu)可使其向上翻轉(zhuǎn),便于拖拉機(jī)行走。側(cè)懸掛裝置翻轉(zhuǎn)時(shí)受力分析如圖5所示。當(dāng)主臂活塞桿施加作用力而輔臂活塞桿作為連桿時(shí),可使I1B1桿繞I1點(diǎn)轉(zhuǎn)動(dòng),即收割裝置上BI、CJ桿分別繞I、J點(diǎn)轉(zhuǎn)動(dòng),BCJI面不再與地面垂直而是成一銳角,整個(gè)收割裝置實(shí)現(xiàn)完全翻轉(zhuǎn),理想狀態(tài)下的結(jié)果是BCJI面轉(zhuǎn)動(dòng)到與地面平行。
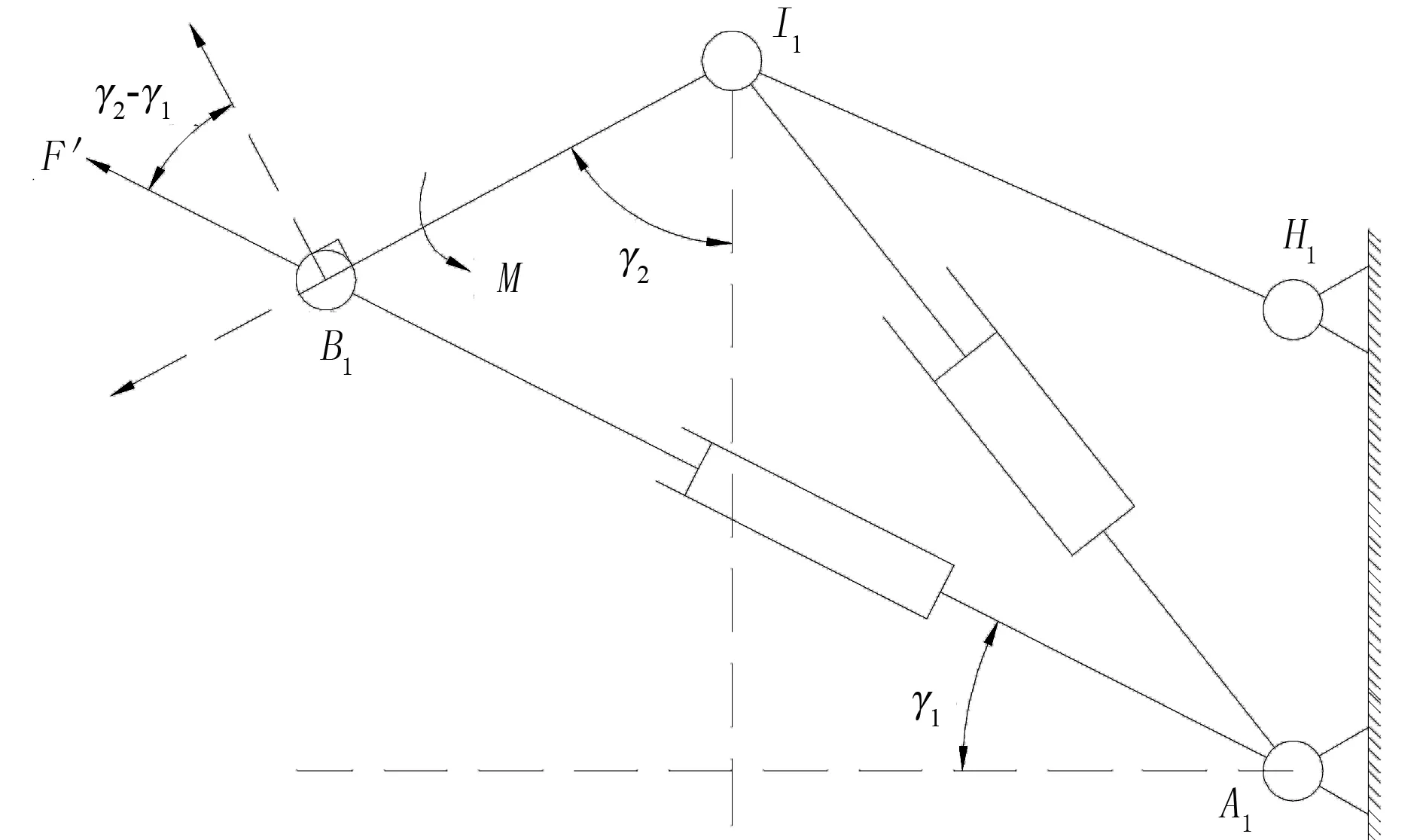
圖5 側(cè)懸掛裝置翻轉(zhuǎn)過程中受力分析圖
取BI、CJ桿長為b,由力矩平衡可得
(5)
(6)
其中,M為整個(gè)側(cè)懸掛機(jī)構(gòu)對(duì)BI、CJ桿施加的總力矩;F′為兩個(gè)主臂活塞桿所代表的BA、CD桿分別對(duì)BC桿的作用力;γ1為仿形機(jī)構(gòu)作折疊動(dòng)作時(shí)主臂活塞桿與地面所成的夾角;γ2為BI、CJ桿與豎直面所成的夾角。
由式(6)可知:F′主要與M和角γ2、γ1之差有關(guān)。當(dāng)M不變,γ2-γ1從負(fù)值到零再到正值,F(xiàn)′由小變大,再由大變小。
3 仿形機(jī)構(gòu)主要尺寸及相關(guān)參數(shù)確定
輔臂活塞桿在收割臺(tái)距離地面的距離為零時(shí)的初始作用角度α,桿長L1為主臂活塞桿所代表的液壓缸在下極限位置的伸長長度,桿長L2為輔臂活塞桿代表的液壓缸體的長度。仿形機(jī)構(gòu)上下移動(dòng)參數(shù)如圖6所示。
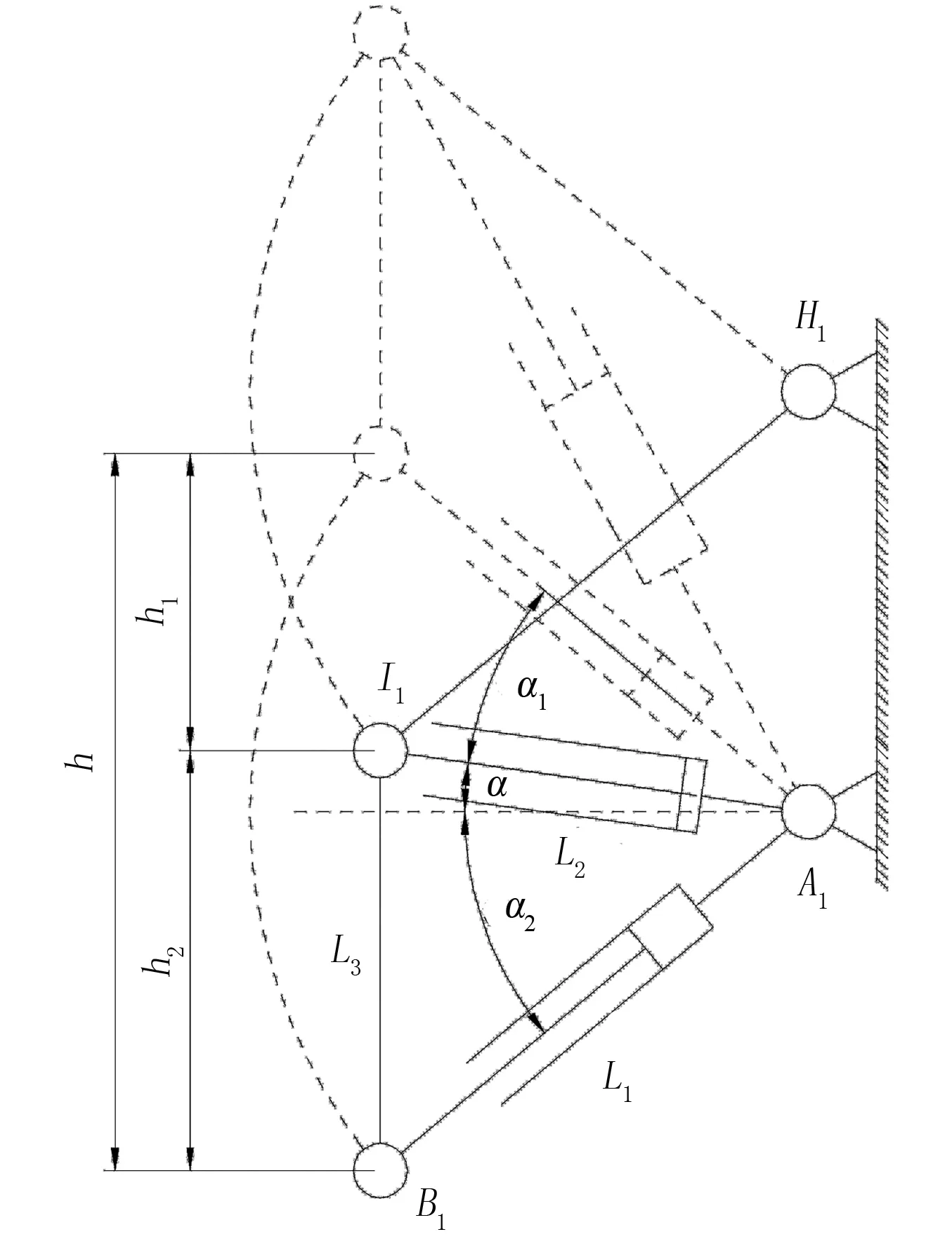
圖6 上下移動(dòng)中的參數(shù)
3.1 初始作用角度α
為使整個(gè)懸掛裝置穩(wěn)定工作且能達(dá)到設(shè)計(jì)所要求的仿形量,即收割臺(tái)距離地面的變動(dòng)范圍,需確定各個(gè)桿件的長度。整個(gè)側(cè)懸掛機(jī)構(gòu)穩(wěn)定升起,需確定適當(dāng)?shù)某跏甲饔媒嵌圈痢?/p>
由圖5可知:上下總仿形量的大小為
(7)
其中,α2為收割臺(tái)距離地面的距離為零時(shí)L1桿與地面所成的角度;α為初始作用角度;α+α2為下仿形角;α1為上仿形角。
由式(7)可知:若要上下仿形量相同,仿形機(jī)構(gòu)的上下拉桿越長,則輔臂活塞桿與地面所成角度變化范圍越小;上下拉桿越短,輔臂活塞桿與地面所成角度變化范圍越大。為使側(cè)懸掛機(jī)構(gòu)能夠穩(wěn)定工作,角度變化范圍越小越好。因此,上下拉桿長一些有利;但拉桿加長,會(huì)使結(jié)構(gòu)不緊湊,重心偏移,對(duì)于懸掛式的收割裝置橫向穩(wěn)定性不利。
一般播種機(jī)上的仿形機(jī)構(gòu)的牽引角α為0°~10°,為使輔臂活塞桿能夠施加初始作用力,現(xiàn)取α為5°,理想條件下α=0°。L2為所選輔臂活塞桿所代表的液壓缸體的長度L;L3為拖拉機(jī)的離地間隙H,tanα2=H/L。選東方紅SE250拖拉機(jī)離地間隙為325mm,L2液壓缸體長度為400mm,則α2=arctan(H/L)=38.66°。要想達(dá)到此理想角度,割臺(tái)與地面距離為0,則下仿形角為α+α2=5°+38.66°=43.66°。現(xiàn)α為5°,仿形機(jī)構(gòu)所要求的收割臺(tái)距離地面的距離在0~30cm范圍內(nèi)變動(dòng),L=400mm,h1=h2=150mm,則tan(α+α1)=(h1+Lsinα)/Lcosα,α+α1=arctan(h1+Lsinα/Lcosα)。上仿形角α1為19.89°。
3.2 確定桿長L1、L2、L3
設(shè)計(jì)上下總仿形量h=300mm,L2為初選液壓缸體的長度L,取L=400mm。L1cosα2=Lcosα,L1=Lcosα/cosα2=400×cos5°/cos38.66°=510.30mm;L1sinα2=510.30×sin38.66°=318.78mm>h2=150mm;L1sin(α+α1)=510.30×sin(5°+19.89°)=214.65>h1=150mm。
由公式(7)得

取BI、CJ桿長度L3=300mm。當(dāng)左連接桿翻轉(zhuǎn)至與地面平行時(shí),且L1桿轉(zhuǎn)至上仿形角,令伸長后的桿長為C,則有
經(jīng)計(jì)算優(yōu)化,最后取得主臂活塞桿長度L1=440mm,輔臂活塞桿長度L2=350mm,BI、CJ桿長度L3=250mm。
4 基于ADAMS的運(yùn)動(dòng)模擬分析
為了驗(yàn)證該機(jī)構(gòu)的仿形效果,應(yīng)用ADAMS軟件對(duì)該機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)模擬[5]。主臂活塞桿和輔臂活塞桿各施加一個(gè)移動(dòng)驅(qū)動(dòng),對(duì)該機(jī)構(gòu)左連接桿施加20 000N豎直向下的力和10 000N·m的轉(zhuǎn)矩,右連接桿與地面固定。對(duì)機(jī)構(gòu)進(jìn)行簡(jiǎn)化,建立其在ADAMS仿真環(huán)境下的模型,運(yùn)行仿真得到左連接架的運(yùn)動(dòng)軌跡[6]。圖7為左連接架相對(duì)于地面的運(yùn)動(dòng)軌跡圖,其位移量即為上下的總仿形量。圖8為左連接架的轉(zhuǎn)動(dòng)軌跡圖。
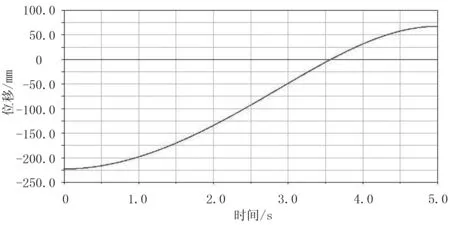
圖7 左連接架豎直向上位移圖
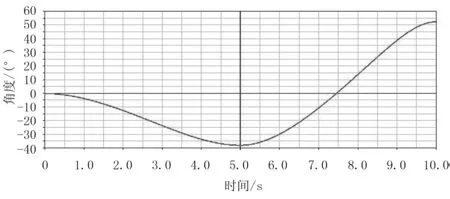
圖8 左連接架旋轉(zhuǎn)角度圖
圖7反映左連接架離地面的高度隨時(shí)間的變化情況。其最大位移量在280~300mm之間,而薰衣草剪切位置在距地面80~100mm剪去, 能滿足高度要求。圖8中,左連接架相對(duì)于IJ軸線的角度變化,其角度變動(dòng)范圍在0°~95°之間,也即左連接架能翻轉(zhuǎn)90°至與地面平行。在整個(gè)裝置上升過程中,由于受到自身重力和液壓缸作用力的影響,其位移變化為非線性變化,但沒有明顯的波動(dòng),穩(wěn)定性可靠。
5 結(jié)論
1)對(duì)仿形機(jī)構(gòu)進(jìn)行受力分析,影響作用力大小的主要因素有輔臂活塞桿與地面所成初始作用角度α,側(cè)懸掛裝置重量G及上仿形角α1、下仿形角α2。
2)對(duì)仿形機(jī)構(gòu)的尺寸及各參數(shù)進(jìn)行了設(shè)計(jì),在輔臂活塞桿與地面所成工作角為5°、初選輔臂活塞缸體的長度為400mm及拖拉機(jī)離地間隙已知的條件下,計(jì)算得出割臺(tái)距離地面為零時(shí)的上仿形量為214mm,總仿形量達(dá)到533mm,能滿足仿形要求。
3)用優(yōu)化后的數(shù)據(jù),運(yùn)用仿真分析軟件ADAMS軟件對(duì)仿形機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)分析,上下總仿形量達(dá)到290mm,整個(gè)側(cè)懸掛裝置能翻轉(zhuǎn)90°,表明該仿形機(jī)構(gòu)能滿足薰衣草收割高度要求。
[1] 崔濤,張東興,楊麗,等.玉米精量播種機(jī)同位仿形半低位投種單體設(shè)計(jì)與試驗(yàn)(英文)[J].農(nóng)業(yè)工程學(xué)報(bào),2012(S2):18-23.
[2] 趙淑紅,蔣恩臣,閆以勛,等.小麥播種機(jī)開溝器雙向平行四桿仿形機(jī)構(gòu)的設(shè)計(jì)及運(yùn)動(dòng)仿真[J].農(nóng)業(yè)工程學(xué)報(bào),2013(14):26-32.
[3] 馮國勇,朱曼江,高瑞林,等.裝載機(jī)液壓臂活塞桿運(yùn)動(dòng)仿真分析[J].機(jī)械研究與應(yīng)用,2012(5):24-26.
[4] 馬華永,王衛(wèi)兵,王坤,等.平行四桿仿形機(jī)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)仿真[J].機(jī)械工程師,2014(7):121-123.
[5] 董江華,姜大成.基于ADAMS的虛擬樣機(jī)技術(shù)實(shí)踐[J].機(jī)械工程師,2009(1):85-86.
[6] 黨黨,湯軍社,賀春榮,等.機(jī)械系統(tǒng)的建模與仿真[J].中國制造業(yè)信息化,2008(7):26-29.
[7] 陜西省輕工業(yè)科學(xué)研究所日化研究室.薰衣草的栽培與加工[M].北京:輕工業(yè)出版社,1979:29-30.Abstract ID:1003-188X(2017)05-0159-EA
Motion Simulation and Design of Lavender Harvester Cutting Height Adjustment Mechanism
Tian Dongyang, Liu Jiaodi, Li Weimin
(College of Mechanical Electrical Engineering, Shihezi University, Shihezi 832003,China)
Lavender can grow for ten years, machines work into the ground long-term resulted uneven ground. In order to ensure that lavender harvesting machine cut lavender stems reservations highly consistent, we should spikes harvest clean, while not hurt the rest of the stem to ensure that lavender subsequent growth, this paper designed harvester cutting height adjustment mechanism which make stem keeping same height. The profiling performance parameters were determined through force analysis. According to the initial work angle and the maximum amount under the profile designed contoured rod length is 440 mm, the maximum amount of the profiling 214 mm. Finally, Adams software application for motion simulation optimization, by motion simulation shows that profiling mechanism can realize up and down and rotate, top and bottom profiling could reach 290 mm, rotate angle could reach 90°, to meet the cut like lavender harvester shaped volume. The agency for the development of lavender harvesting machine provided gist.
lavender harvesting machine; cutting device; profiling; motion simulation
2016-04-22
兵團(tuán)工業(yè)及高新技術(shù)科技攻關(guān)與成果轉(zhuǎn)化計(jì)劃項(xiàng)目(2015AB020);八師中小企業(yè)專項(xiàng)(2014QY04)
田東洋(1990-),男,河南駐馬店人,碩士研究生,(E-mail) tiandongyang@sina.com。
劉姣娣(1975-),女,湖北武岡人,副教授,碩士生導(dǎo)師,(E-mail)shzdxljd@163.com。
S817.11+1
A
1003-188X(2017)05-0159-04
