采摘機(jī)器人機(jī)械手夾緊裝置優(yōu)化設(shè)計(jì)——基于Pro/E和ADAMS聯(lián)合仿真
2017-12-16 09:15:57董其維
農(nóng)機(jī)化研究 2017年5期
董其維
(四川機(jī)電職業(yè)技術(shù)學(xué)院, 四川 攀枝花 617000)
?
采摘機(jī)器人機(jī)械手夾緊裝置優(yōu)化設(shè)計(jì)
——基于Pro/E和ADAMS聯(lián)合仿真
董其維
(四川機(jī)電職業(yè)技術(shù)學(xué)院, 四川 攀枝花 617000)
采摘機(jī)器人作業(yè)過(guò)程中,果實(shí)的機(jī)械損傷是影響采摘效果的主要因素之一。為了降低采摘機(jī)械手對(duì)果實(shí)的傷害、縮短設(shè)計(jì)周期、降低實(shí)驗(yàn)成本,提出了一種新的機(jī)械手夾緊裝置的優(yōu)化設(shè)計(jì)方法。該方法利用軟件的聯(lián)合虛擬仿真功能,實(shí)現(xiàn)了虛擬環(huán)境下夾持機(jī)構(gòu)夾緊力的計(jì)算與同步優(yōu)化。同時(shí),構(gòu)建了采摘機(jī)械手虛擬樣機(jī)多體系統(tǒng)框架,設(shè)計(jì)了采摘機(jī)械手仿真計(jì)算的多體動(dòng)力學(xué)模型,利用Pro/E軟件建立了機(jī)械手的數(shù)字化模型,并導(dǎo)入ADAMS中進(jìn)行了模擬仿真分析;通過(guò)計(jì)算得到了不同機(jī)械手手指尺寸的夾緊力大小。由夾緊力的多組仿真結(jié)果可以得到:在不超過(guò)水果破碎夾緊力閾值時(shí),最大夾緊力所對(duì)應(yīng)的機(jī)械手手指長(zhǎng)寬比,從而有效縮短了機(jī)械手的設(shè)計(jì)周期,提高了設(shè)計(jì)效率,為采摘機(jī)器人的研究提供了重要的數(shù)據(jù)參考。
采摘機(jī)械手;聯(lián)合仿真;夾緊裝置;優(yōu)化設(shè)計(jì);ADMAS
0 引言
在復(fù)雜機(jī)械產(chǎn)品的設(shè)計(jì)開發(fā)過(guò)程中,虛擬樣機(jī)技術(shù)已經(jīng)成為一種重要的研發(fā)手段,為產(chǎn)品的開發(fā)提供了一種虛擬化的模式,可以很好地解決物理實(shí)體樣機(jī)開發(fā)模式帶來(lái)的各種弊端。采摘機(jī)械手屬于較為復(fù)雜的機(jī)械模型,如單純采用CAD軟件,其建模能力會(huì)顯得不足;而Pro/E軟件具有強(qiáng)大的建模能力,且與ADAMS軟件有良好的兼容接口,可以方便地實(shí)現(xiàn)模型的轉(zhuǎn)換和數(shù)據(jù)傳輸。利用聯(lián)合仿真方法可以充分地發(fā)揮兩種軟件各自的專長(zhǎng),實(shí)現(xiàn)高效率的機(jī)械產(chǎn)品仿真設(shè)計(jì)。本研究將Pro/E和ADAMS軟件的聯(lián)合仿真功能應(yīng)用到了機(jī)械手的夾緊力計(jì)算和同步優(yōu)化設(shè)計(jì)過(guò)程中,通過(guò)對(duì)仿真模擬結(jié)果的對(duì)比,以期得到合理的機(jī)械手結(jié)構(gòu)尺寸。
1 采摘機(jī)械手夾緊裝置優(yōu)化
采摘機(jī)械人機(jī)械手夾緊裝置的夾緊力設(shè)計(jì)不合理,極易造成采摘果實(shí)的機(jī)械損傷,影響采摘效率和采摘質(zhì)量。為了避免機(jī)械手對(duì)果實(shí)造成的損失,一般采用質(zhì)地較軟的材料對(duì)果實(shí)進(jìn)行保護(hù)。但是,影響夾緊力的根本因素是機(jī)械手的尺寸,機(jī)械手指的長(zhǎng)寬比對(duì)果實(shí)和機(jī)械手的接觸力影響較大。如果采用物理實(shí)驗(yàn)方法對(duì)其進(jìn)行優(yōu)化設(shè)計(jì),需要制作多組機(jī)械手,開發(fā)周期長(zhǎng)、實(shí)驗(yàn)成本高;而如果采用圖1所示的優(yōu)化設(shè)計(jì)流程,可以解決這個(gè)問(wèn)題。
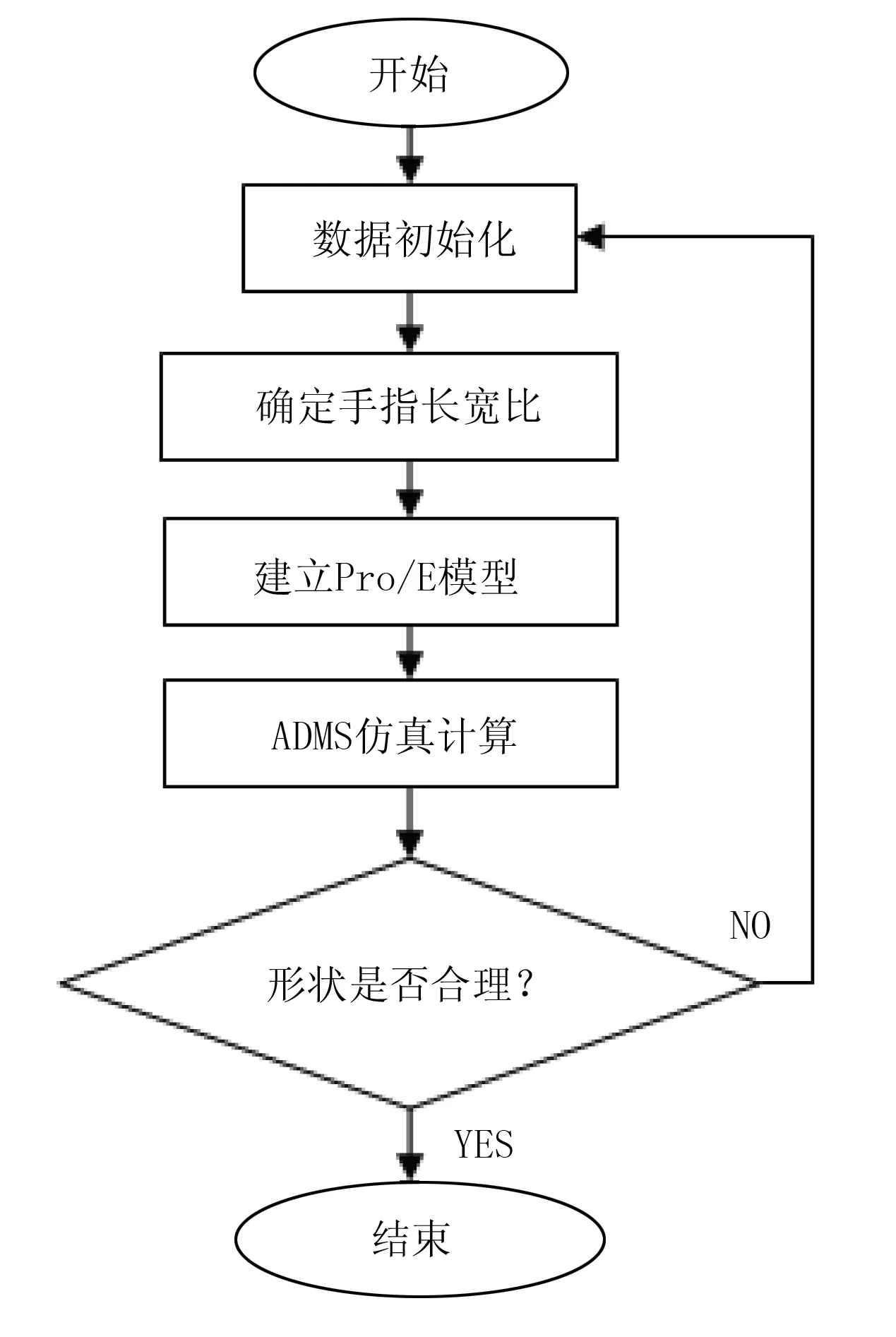
圖1 夾緊裝置優(yōu)化設(shè)計(jì)流程
其具體步驟:首先,根據(jù)設(shè)計(jì)經(jīng)驗(yàn)初步確定機(jī)械手手指的長(zhǎng)寬比,采用Pro/E軟件建立機(jī)械手的仿真模型,將模型導(dǎo)入到ADAMS軟件中進(jìn)行運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)仿真,得到夾緊力的計(jì)算結(jié)果;在建立多組不同的手指形狀,重新計(jì)算夾緊力;通過(guò)結(jié)果的對(duì)比,優(yōu)化裝置形狀的設(shè)計(jì)。其中,最重要的步驟是ADAMS的仿真計(jì)算過(guò)程,其詳細(xì)框架如圖2所示。
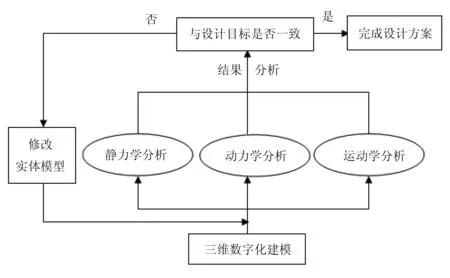
圖2 機(jī)械手虛擬樣機(jī)系統(tǒng)結(jié)構(gòu)框圖
該系統(tǒng)由靜力學(xué)仿真、動(dòng)力學(xué)仿真、運(yùn)動(dòng)學(xué)仿真3大模塊組成,仿真方法主要是通過(guò)添加約束、施加驅(qū)動(dòng)和載荷來(lái)實(shí)現(xiàn)。機(jī)械手虛擬樣機(jī)系統(tǒng)的自由度與構(gòu)成機(jī)械的構(gòu)件數(shù)量、運(yùn)動(dòng)副的類型和數(shù)量、原動(dòng)機(jī)的類型和數(shù)量,以及其它約束條件有關(guān)。在ADAMS軟件中,常用的運(yùn)動(dòng)副和自由度的約束個(gè)數(shù)如表1所示。
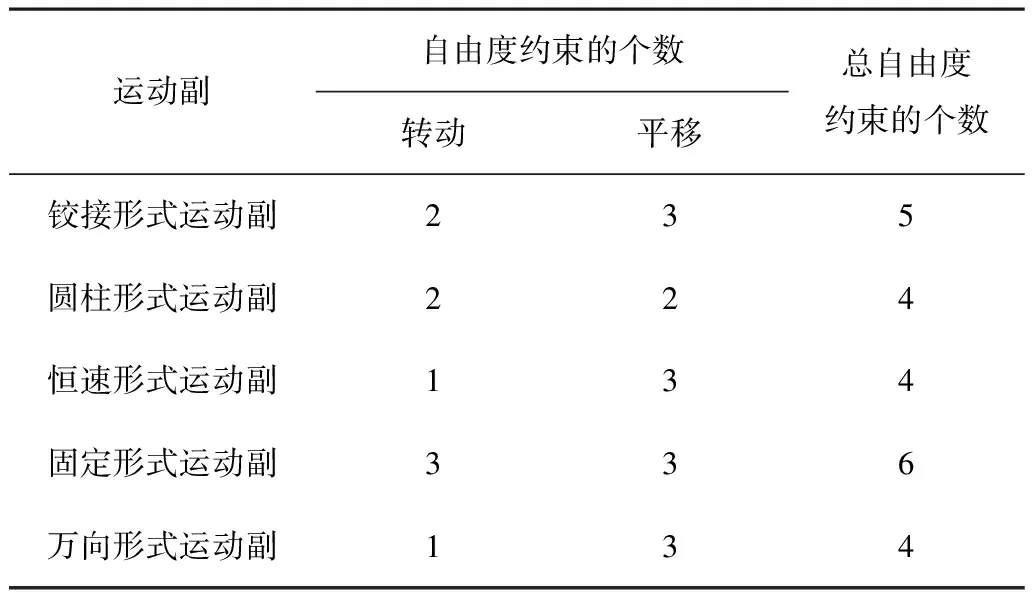
表1 ADAMS常用的運(yùn)動(dòng)副和自由度約束的個(gè)數(shù)
采摘機(jī)械手的自由度個(gè)數(shù)可以通過(guò)式(1)進(jìn)行計(jì)算,有
(1)
其中,n表示裝置中活動(dòng)構(gòu)件的個(gè)數(shù);pi表示第i個(gè)運(yùn)動(dòng)副的約束個(gè)數(shù);m表示運(yùn)動(dòng)副的總個(gè)數(shù);qj表示第j個(gè)驅(qū)動(dòng)約束的個(gè)數(shù);x表示總驅(qū)動(dòng)約束個(gè)數(shù);Rk表示其他形式的約束條件個(gè)數(shù)。在采摘機(jī)器人機(jī)械手動(dòng)力學(xué)計(jì)算過(guò)程中,自由度和驅(qū)動(dòng)約束和系統(tǒng)的動(dòng)力學(xué)特性具有密切的聯(lián)系,在ADAMS軟件中,夾緊裝置的自由度決定了機(jī)構(gòu)的夾緊特性。
2 機(jī)械手夾緊裝置多體動(dòng)力學(xué)模型
在ADAMS中采用多體系統(tǒng)動(dòng)力學(xué)的拉格朗日乘子法建立系統(tǒng)運(yùn)動(dòng)方程。采用拉格朗日方程可以避免出現(xiàn)不做功的理想約束反力,使未知變量的數(shù)目減少到最低程度。ADAMS軟件中采用的動(dòng)力學(xué)方程的普遍形式為
(2)
(3)
其中,λ表示采摘機(jī)器人機(jī)械手夾緊力矩陣;F表示系統(tǒng)的動(dòng)力學(xué)微分方程;y表示完整的代數(shù)約束方程;G表示非完整的約束方程。對(duì)于該方程的求解,由于系統(tǒng)的自由度為0,因此只需要求解系統(tǒng)的約束方程,則有
(4)
該方程的求解需要采用預(yù)估校正方法,利用Taylor級(jí)數(shù)根據(jù)當(dāng)前系統(tǒng)的狀態(tài)可以預(yù)估下一個(gè)時(shí)刻系統(tǒng)的狀態(tài)矢量值,由
(5)
其中,h=tn+1-tn表示時(shí)間步長(zhǎng),為了提高計(jì)算的準(zhǔn)確性,利用吉爾k+1階積分求解程序來(lái)進(jìn)行校正,有
(6)
其中,β0、ai表示吉爾積分程序的系數(shù)值,公式還可以寫成
(7)
將式(3)在t=tn+1時(shí)刻展開可得
(8)
對(duì)于tn時(shí)刻速度、加速度的確定,可由約束方程求一階、二階時(shí)間導(dǎo)數(shù)得到,則有
(9)
對(duì)于tn時(shí)采摘機(jī)器人機(jī)械手夾緊力的確定,可由帶乘子拉格朗日方程得到,則有
(10)
將公式在t=tn+1時(shí)刻展開,得
(11)
ADAMS使用修正的牛頓-拉夫森迭代方法求解上面的非線性方程,其迭代校正公式為
(12)
其中,j表示第j次迭代,則有
Δqj=qj+1-qj,Δvj=vj+1-vj,Δλj-λj+1-λj
(13)
3 Pro/E建模和ADAMS仿真優(yōu)化設(shè)計(jì)
軟件ADAMS不具有專業(yè)的建模功能,因此需要在一般的三維建模軟件中進(jìn)行建模后導(dǎo)入到ADAMS軟件中進(jìn)行仿真。本次研究以Pro/E作為建模軟件,并將模型保存為.x_t格式文件,模型導(dǎo)入界面如圖3所示。
利用ADAMS中的File-Import導(dǎo)入模型,文件類型選擇為Parasolid,在File To Read中找到建立好的模型,類型默認(rèn)為ASCLL,輸入模型的名字便可以導(dǎo)入模型,導(dǎo)入后的模型如圖4所示。
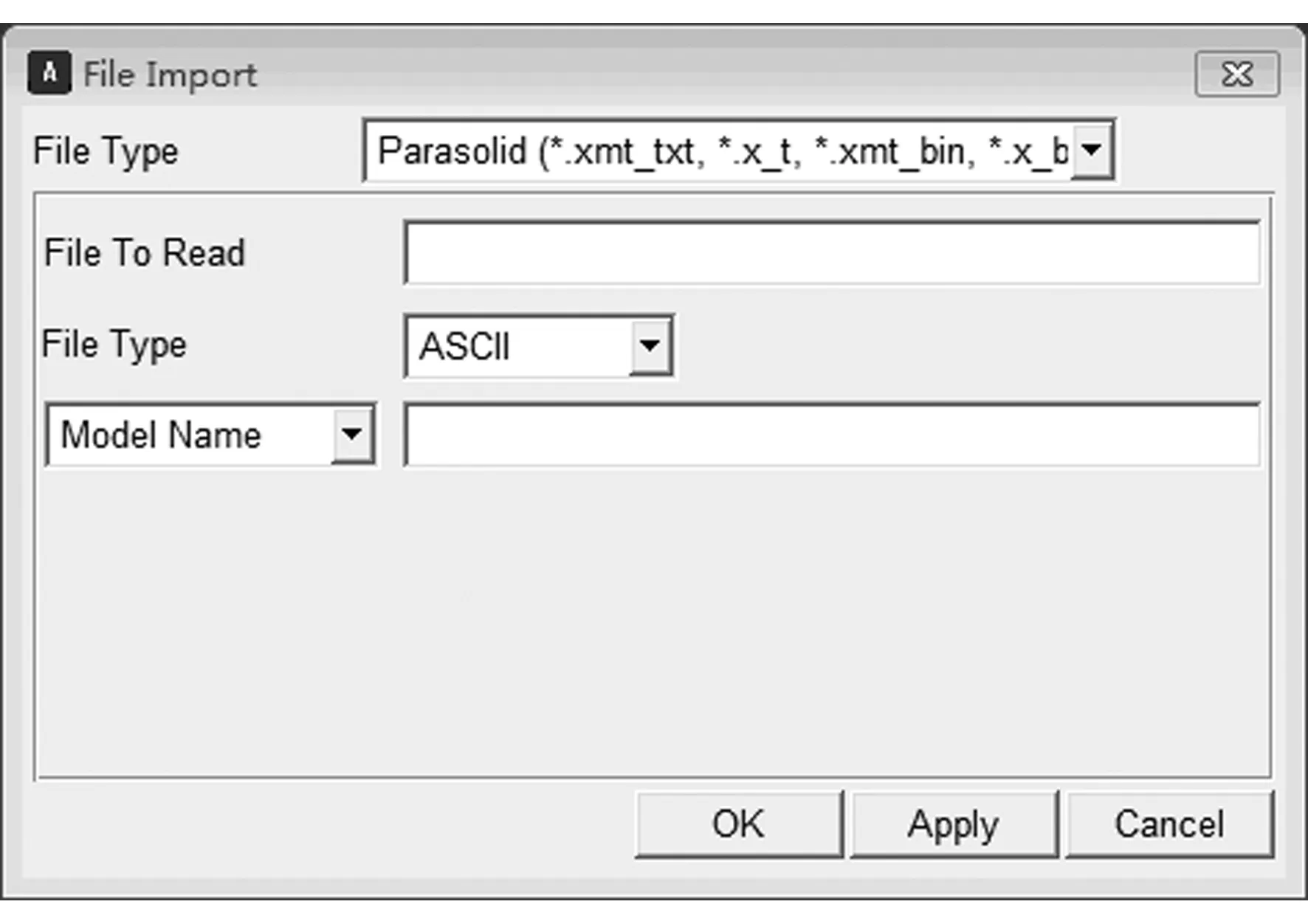
圖3 機(jī)械手模型導(dǎo)入界面
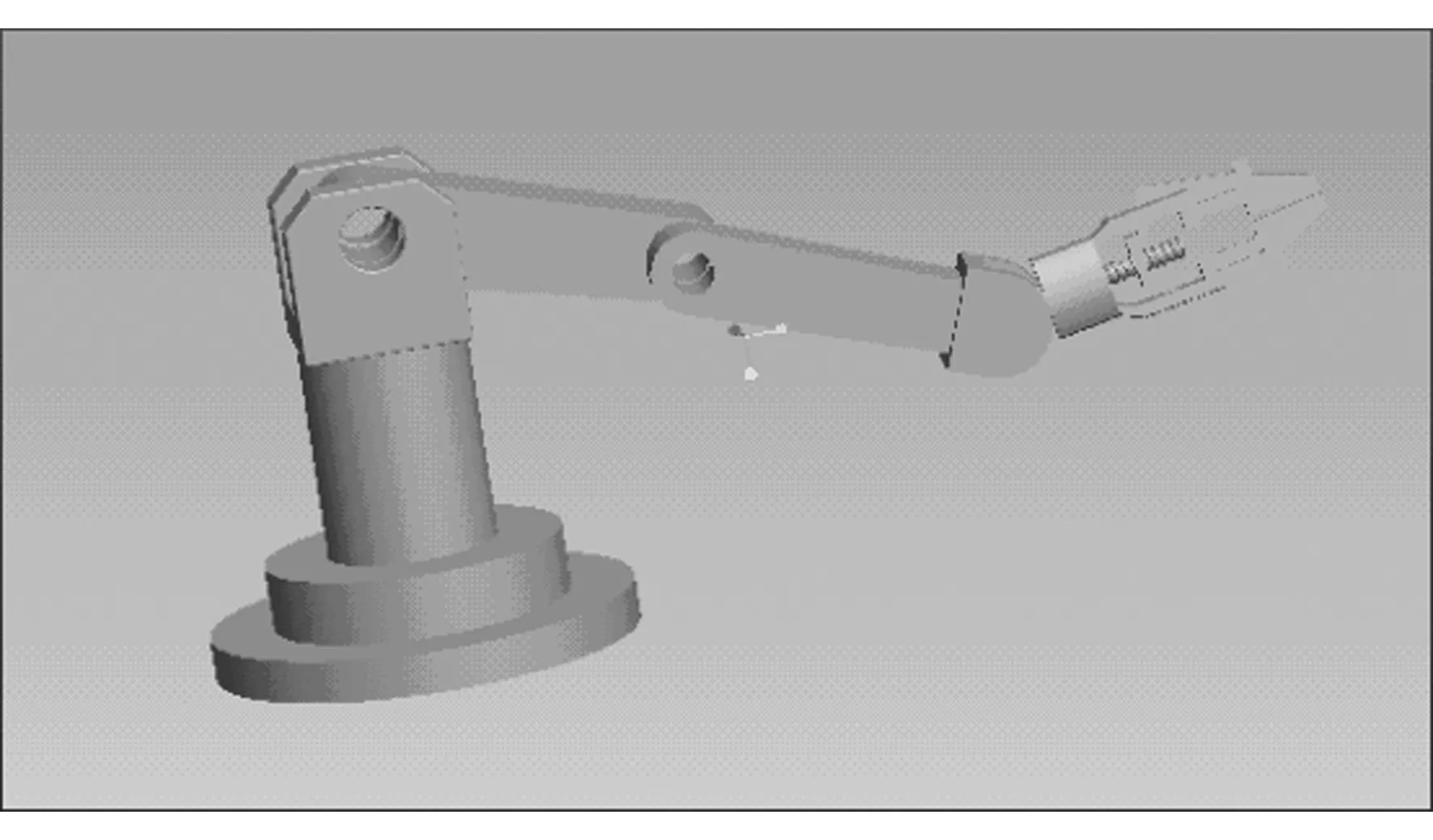
圖4 導(dǎo)入后的機(jī)械手模型
模型導(dǎo)入后可以在ADAMS軟件中設(shè)置轉(zhuǎn)動(dòng)副和移動(dòng)副,利用仿真計(jì)算功能可以得到機(jī)械手的力、力矩、位移、速度及加速度等。本次仿真主要是計(jì)算采摘機(jī)器人機(jī)械手指的末端夾緊力,因此在仿真計(jì)算過(guò)程中主要計(jì)算了機(jī)械手指的夾緊力,并利用ADAMS軟件的后處理功能輸出了夾緊力隨時(shí)間的變化曲線,如圖5所示。
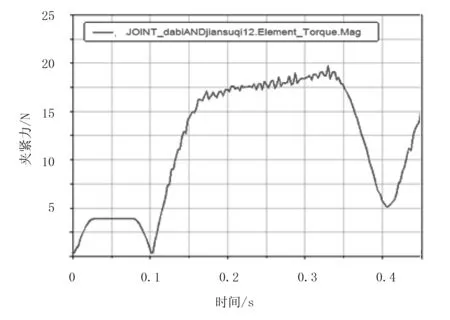
圖5 夾緊力計(jì)算曲線
由圖5可以得到:在果實(shí)采摘過(guò)程中,機(jī)械手指的最大夾緊力,而優(yōu)化設(shè)計(jì)過(guò)程需要在不超過(guò)果實(shí)破碎夾緊力閾值的前提下,得到最大的果實(shí)采摘力。據(jù)此,本次研究對(duì)不同采摘機(jī)器人機(jī)械手指的形狀進(jìn)行了優(yōu)化,并通過(guò)仿真計(jì)算得到了不同長(zhǎng)寬比夾緊手指的夾緊力,其計(jì)算結(jié)果如表2所示。
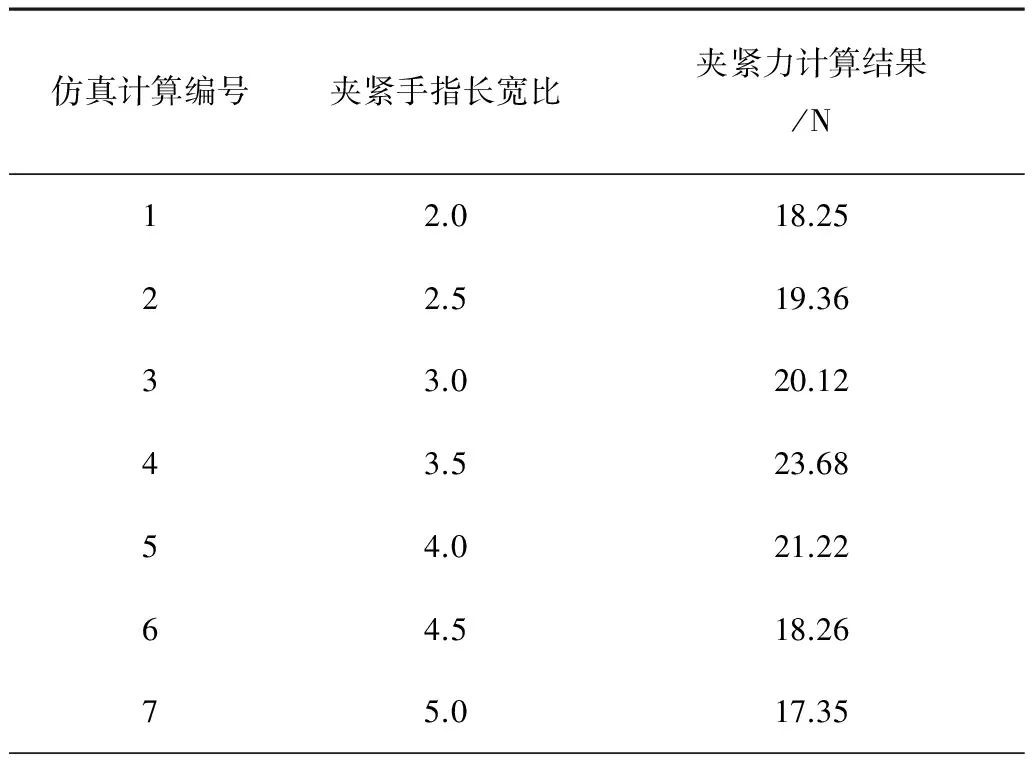
表2 夾緊裝置不同形狀下的夾緊力計(jì)算結(jié)果
由計(jì)算結(jié)果可以看出,不同長(zhǎng)寬比形狀的機(jī)械手指獲得的夾緊力均有所不同。對(duì)于一般類型的果實(shí),假設(shè)果實(shí)破碎的夾緊力閾值為30N,從總體數(shù)據(jù)可以看出,機(jī)械手指的夾緊力均未超過(guò)水果破碎的夾緊力閾值。在手指長(zhǎng)寬比為3.5時(shí),在不超過(guò)果實(shí)破碎夾緊力閾值的前提下,可以產(chǎn)生最大的夾緊力。
4 結(jié)論
依據(jù)ADAMS中拉格朗日乘子法系統(tǒng)運(yùn)動(dòng)方程,建立了采摘機(jī)器人機(jī)械手的多體系統(tǒng)動(dòng)力學(xué)模型,并利用Pro/E軟件建立了機(jī)械手的數(shù)值化模型,將模型導(dǎo)入到ADAMS軟件中進(jìn)行了仿真計(jì)算,最后利用ADAMS軟件的后處理功能輸出了夾緊力隨時(shí)間的變化曲線。由仿真計(jì)算結(jié)果可以看出:對(duì)于不同長(zhǎng)寬比形狀的機(jī)械手指獲得的夾緊力均有所不同,當(dāng)手指長(zhǎng)寬比為3.5時(shí),在不超過(guò)果實(shí)破碎夾緊力閾值的前提下,可以產(chǎn)生最大的夾緊力。可以利用該結(jié)果對(duì)機(jī)械手進(jìn)行優(yōu)化設(shè)計(jì),而水果的破碎夾緊力閾值可以人為進(jìn)行設(shè)定。該方法有效地縮短了產(chǎn)品的研發(fā)周期,節(jié)省了物理實(shí)驗(yàn)成本,對(duì)采摘機(jī)器人的優(yōu)化設(shè)計(jì)具有重要的意義。
[1] 王文慶,張濤,龔娜.基于多傳感器融合的自主移動(dòng)機(jī)器人測(cè)距系統(tǒng)[J].計(jì)算機(jī)測(cè)量與控制,2013,21(2): 343-345.
[2] 韋偉,周凌翱,劉青.一種便攜式的紅外測(cè)距系統(tǒng)[J].電子設(shè)計(jì)工程,2011,19(21):40-42.
[3] 劉金帥,賴惠成,賈振紅.基于YCbCr顏色空間和Fisher判別分析的棉花圖像分割研究[J].作物學(xué)報(bào),2011,37(7):1274-1279.
[4] 朱群峰,黃磊.溫室移動(dòng)機(jī)器人軌跡控制系統(tǒng)的設(shè)計(jì)[J].農(nóng)機(jī)化研究,2009,31(4):73-75.
[5] 張衛(wèi)東.我國(guó)溫室發(fā)展的現(xiàn)狀及發(fā)展建議[J].科技信息,2013(10):439.
[6] 李明,李旭,孫松林,等.基于全方位視覺傳感器的農(nóng)業(yè)機(jī)械定位系統(tǒng)[J].農(nóng)業(yè)工程學(xué)報(bào),2010,26(2): 170-174.
[7] 傅錫敏,薛新宇.基于我國(guó)施藥技術(shù)與裝備現(xiàn)狀的發(fā)展思路[J].中國(guó)農(nóng)機(jī)化,2008(6):72-76.
[8] 傅澤田,祁力鈞,王俊紅.精確施藥拉術(shù)研究進(jìn)展與對(duì)策[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2007,38(1):189-192.
[9] 郭輝,韓長(zhǎng)杰.精確施藥技術(shù)的研究與應(yīng)用現(xiàn)狀[J].農(nóng)業(yè)技術(shù)與裝備,2009(10):42-46.
[10] 呂太國(guó).靜電噴霧系統(tǒng)特性研究[J].農(nóng)機(jī)化研究,2009,31(5):54-70.
[11] 燕明德,賈衛(wèi)東,張斌,等.國(guó)內(nèi)外靜電噴霧施藥技術(shù)及機(jī)具研究[J].農(nóng)業(yè)機(jī)械,2008(8):53-54.
[12] 劉金龍,丁為民,鄧巍.果園對(duì)靶噴霧紅外探測(cè)系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J].江蘇農(nóng)業(yè)科學(xué),2012,40(12):370-372.
[13] 吳崇友,丁為民,張敏,等. 油菜分段收獲脫粒清選試驗(yàn)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2010,41(8):72-76.
[14] 李耀明,李洪昌,徐立章.短紋桿-板齒與釘齒脫粒滾筒的脫粒對(duì)比試驗(yàn)研究[J].農(nóng)業(yè)工程學(xué)報(bào),2008, 24(3):139-142.
[15] 王顯仁,李耀明.脫粒原理與脫粒過(guò)程的研究現(xiàn)狀與趨勢(shì)[J].農(nóng)機(jī)化研究,2010,32(1):218-221.
[16] 劉德軍,趙秀榮,高連興,等.不同收獲方式含水率對(duì)油菜收獲物流損失的影響[J].農(nóng)業(yè)工程學(xué)報(bào),2011, 27(10):339-342.
[17] 金城謙,吳崇友,袁文勝.鏈夾式移栽機(jī)栽植作業(yè)質(zhì)量影響因素分析[J].農(nóng)業(yè)工程學(xué)報(bào),2008,39(9):196- 198.
[18] 劉婷婷,羅娟,侯書林.基手MATLAB的移栽機(jī)栽插機(jī)構(gòu)的運(yùn)動(dòng)學(xué)分析[J].農(nóng)機(jī)化研究,2009,31(9): 68-71.
[19] 韓青松,尚士友,王志國(guó),等.基于Pro/E的水草收割機(jī)明輪裝置建模與仿真[J].農(nóng)機(jī)化研究,2006(6):95-97.
[20] 封俊,秦貴.移栽機(jī)的吊杯運(yùn)動(dòng)分析與設(shè)計(jì)準(zhǔn)則[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2002(9):48-50.
[21] 秦國(guó)華,張衛(wèi)紅,周孝倫,等.夾緊方案的數(shù)學(xué)建模及夾緊力的優(yōu)化設(shè)計(jì)[J].機(jī)械科學(xué)與技術(shù),2005,24(4): 438-442,446.
[22] 田韶鵬,黃正東,吳森,等.基于特征的加工件定位配置的優(yōu)化方法[J].拖拉機(jī)與農(nóng)用運(yùn)輸車,2005(4): 80-82.
[23] 周良墉. 星光至尊 4LL-2.0D 型全喂入履帶收割機(jī)[J].現(xiàn)代農(nóng)機(jī),2011(6):41.
[24] 張敏,吳崇友,盧晏,等. 油菜分段收獲脫粒分離功率消耗試驗(yàn)研究[J]. 中國(guó)農(nóng)業(yè)大學(xué)學(xué)報(bào),2010,15(4): 120-123.
[25] 李麗,李恒,何雄奎.紅外靶標(biāo)自動(dòng)探測(cè)器的研制及試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2012,28(12):159-162.
[26] 馬锃宏,李南,王漢斌,等.溫室株間電驅(qū)鋤草控制系統(tǒng)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2015,46(1):89-93.
[27] 陳運(yùn)鵬,龍慧,劉志杰.我國(guó)施肥技術(shù)與施肥機(jī)械的研究現(xiàn)狀及對(duì)策[J].農(nóng)機(jī)化研究,2015,37(4):255-260.
[28] 姬江濤,鄭治華,杜蒙蒙.農(nóng)業(yè)機(jī)器人的發(fā)展現(xiàn)狀及趨勢(shì)[J].農(nóng)機(jī)化研究,2014,36(12):1-4.
[29] 喬永亮,何東鍵,趙川源,等.基于多光譜圖像和SVM的玉米田間雜草識(shí)別[J].農(nóng)機(jī)化研究,2013,35(8):30-34.
Optimization Design for Clamping Device of Picking Robot Manipulator Based on the Co-simulation of ADAMS and Pro/E
Dong Qiwei
(Sichuan Electromechanical Institute of Vocation and Technology, Panzhihua 617000, China)
In the operation process of the picking robot, the mechanical damage of fruit is one of the main factors that affect the picking effect. In order to reduce the picking manipulator on fruit damage, shorten the design cycle, reduce the experimental cost, it puts forward the optimization design method of a new manipulator clamping device. The method uses the software of virtual simulation function to realize the virtual environment under the clamping bodies clamping force calculation and synchronous optimization. By constructing the picking manipulator virtual prototype of multi agent system frame, it designs the picking manipulator simulation of multi body dynamics model. And the digital model of the manipulator is established by Pro / E, which is imported to Adams were simulation analysis. By calculating the clamping force of the different manipulator finger size and the clamping force of the simulation results,it can get in no more than fruit broken clamping force threshold, which corresponds to the maximum clamping force of the mechanical finger length to width ratio, to effective relationship manipulator design cycle, improve the design efficiency, which provides important reference data for the picking robot research.
manipulator; co-simulation; clamping device; optimization design; ADMAS
2016-03-10
四川省自然科學(xué)基金項(xiàng)目(2015NZG446)
董其維(1972-),男,四川攀枝花人,講師,碩士,(E-mail)dqw1972@qq.com。
S225;TP241
A
1003-188X(2017)05-0226-05
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
