基于FPA控制系統的多指多關節采摘機械手設計
2017-12-16 09:15:58申一歌
農機化研究 2017年5期
申一歌,袁 鑄
(河南工業職業技術學院,河南 南陽 473000)
?
基于FPA控制系統的多指多關節采摘機械手設計
申一歌,袁 鑄
(河南工業職業技術學院,河南 南陽 473000)
針對傳統機械手爪存在抓持動作單一、自由度少及通用性較差等缺點,設計了一種新型的由FPA直接驅動的多指多關節采摘機械手,有效地提高了機械手的靈活性和對不同果實采摘的自適應能力。從靜力學的角度,建立了彎曲關節的轉角及輸出力的靜態模型,并利用多目標優化方法對各個關鍵受力的均勻性進行了優化設計,分析了三自由度手指的輸出力特性。最后,通過實驗方法建立了機械手的蘋果抓持實驗,分析了氣壓值與抓持能力之間的關系。實驗結果表明:隨著待采摘果實目標半徑的增大,機械手抓取關節角度有所減小,機械手抓取關節手指內腔的壓力有所降低,為新型采摘機械手的研究提供了理論借鑒和技術參考。
多指機械手;多目標優化;FPA驅動;抓持能力;自由度
0 引言
農業的機械化實現了用機械動力和電力代替人力和畜力,以工作機械代替人的手工工具的目標。20世紀70年代以來,農業逐漸推廣應用自動控制、電子計算機、系統工程、遙感等技術,實現部分生產作業和管理自動化,取得了提高作業質量、效率和安全、省力等效果。在果蔬采收作業時,采摘機器人是最常用的自動化和智能化機械工具之一,但在作業過程中,傳統的采摘機械手的抓取動作比較單一,手指關節自由度較少,通用性較差,制約了采摘機器人的發展和應用。多指采摘機械手手指關節靈活,可以實現復雜的抓取動作,如果將其作為在采摘機器人與外界作業環境的末端執行部件,必然會提高采摘機器人的自動化水平,提高其作業范圍和作業能力。
1 基于FPA的多指采摘機械手設計
采摘機器人設計的最重要部分之一是機械手的設計,機械手設計的好壞直接影響機械人的作業性能和工作效率。機械手指的驅動是機械手設計的一個難題,要在小的空間內實現多自由度的靈活動作,且還要保證機械手指具有足夠的抓取力。在此背景下,各國的農業機器人專家和學者都在積極探討和研究一種既具有對大部分果實自適應采摘能力,又對大部分果實損傷較小的采摘機械手。其中,典型的代表是Monta等人研制的番茄采摘機械手,其結構如圖1所示。

圖1 機械手番茄采摘照片
該末端執行器由4個90°間隔分布的手指和1個吸盤組成,在采摘番茄過程中,機械手對果實的損傷較小,其工作原理如圖2所示。其每個手指都是使用橡膠軟管進行連接,軟管使用纜繩連接,拉動纜繩時,手指向內彎曲,放開纜繩,手指放松,配合壓力傳感器和吸盤,可以完成整個果實采摘動作。為了提高手指關節的靈活程度,設計了多關節靈活動作的機械手指,結構如圖3所示。
由于果實形狀各異,為了滿足機械手指的自適應能力,將其設計成模塊化結構,手指數量設計為3個,單個手指的關節數量設計為3個,手指間的距離可以根據不同的果實調節。
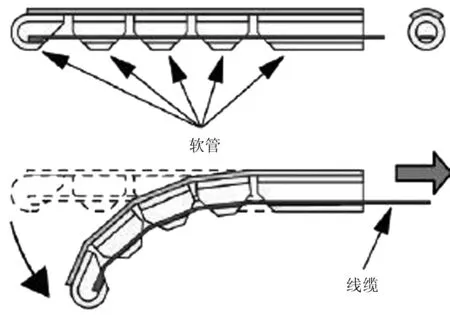
圖2 機械手末端執行器原理圖
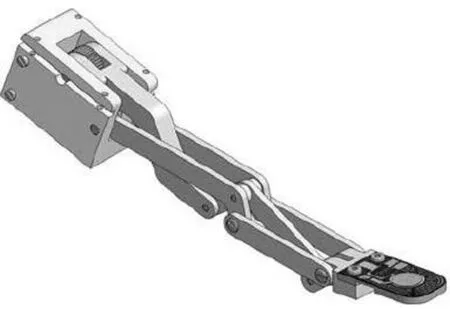
圖3 多關節機械手指結構
多指采摘機械手的控制系統分為上位機和下位機兩部分:上位機主要負責手指各個關節和多個手指的協調工作,包括運動學計算、軌跡計算和關節控制;下位機主要負責壓力和角度的測量與控制,包括各種傳感器和數據采集設備,如圖4所示。上位機和下位機由CAN總線連接,可以有效地提高系統的控制速度和性能,關節控制系統框架如圖5所示。
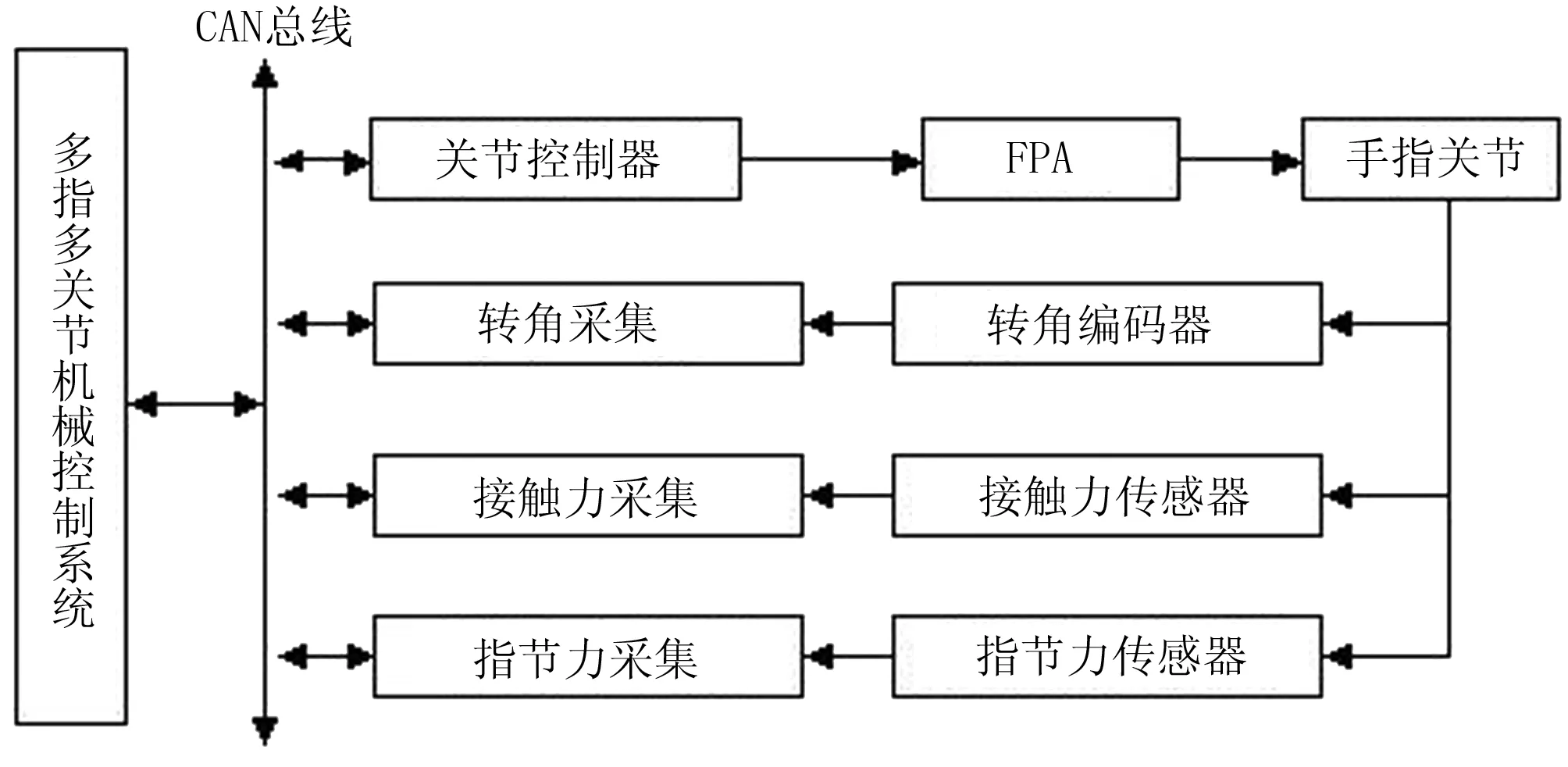
圖4 多指多關節采摘機械手控制系統
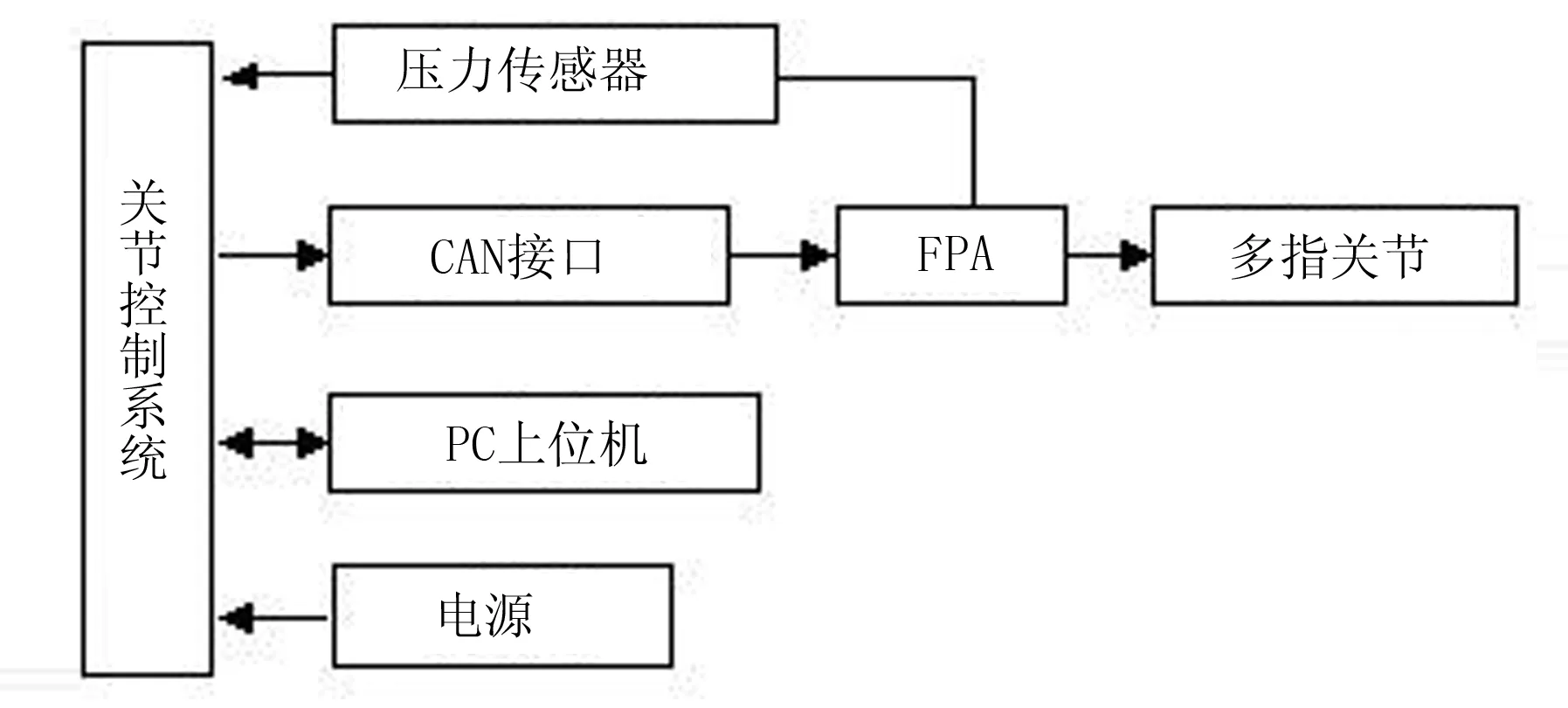
圖5 關節控制系統框架
關節控制器系統主要是控制關節的彎曲驅動和彎曲力的大小,是機械手控制的基礎構件。本設計的控制器使用的是壓力比例控制閥,并利用壓力反饋信號實現關節運動的調節。采摘機械手總體的控制電路如圖 6所示。
采摘機械手的總體控制電路可以根據采摘果實的數量和形狀進行設定,通過實驗標定機械手的采摘姿態、關節角度和FPA中的壓力值,通過綜合評估后確定各個關節合適的壓力值。在采摘作業過程中,對FPA中的壓力值進行閉環控制,通過閉環控制調節壓力值,使其適應不同的待采摘果實作業對象,從而有效地提高采摘質量和采摘效率。
2 多指采摘機械手幾何和運動學模型
多指采摘機械手設計的關鍵是多指幾何結構,幾何形狀關系到手指的運動角度和內腔的壓力,幾何形狀的優化可以合理地設計出對果實損失較小的采摘機械手。假設待采摘果實的結合方程為
x2+y2=rg2
(1)
其中,rg表示待采摘果實的半徑。假設機械手關節1的轉動中心O1的坐標為
(x1,y1)=(a,-rg-Hb)
(2)
其中,Hb表示待采摘果實到底板的距離;a表示關節1的長度。關節2繞中心O1轉動的坐標為
(x2,y2)=(a+L1cosθ1,-rg-Hb+L1sinθ1)
(3)
其中,關節L1表示關節2的長度;θ1表示關節2轉過的角度。關節3繞中心O3轉動的坐標為
(4)
其中,關節L2表示關節3的長度;θ2表示關節3轉過的角度,則指節的幾何方程可以表示為
(5)
綜合以上公式可得,各個指節和待采摘果實之間接觸點的縱坐標為
(6)
在機械手采摘果實時,手指與目標果實相切的切線斜率,其表達式為
(7)
因此,可得各關節彎曲角為
(8)
為了使多指機械手可以抓住果實,需要向果實的接觸點施加壓力,其中接觸點的坐標為
(9)
由于果實采摘作業時果實較為容易發生損傷,因此需要各個手指的力保持盡量均勻,使果實的傷害降低到最小。針對果實的抓取模型,建立了如公式(10)所示的優化方程。
優化變量為
FN(X)=[FN1,FN2,FN3,FN4,FN5,FN6]T
(10)
目標函數為
(11)
該模型為有約束的線性規劃模型,可以通過輸入手指的轉角和接觸點壓力值,對每個輸出壓力進行優化,從而得到均勻分布的采摘抓取力。
3 基于FPA的多指采摘機械手實驗研究
為了驗證FPA多指采摘機械手的可靠性,對機械手進行了實驗測試,包括關節的角度變化和關節的內腔壓力狀況。實驗機械手采用多指三關節機械手,其實物如圖7所示。
為了降低機械關節結構對果實的傷害,給機械手配置了橡膠套。該機械手的手指關節靈活,具有較強的適應能力,各項參數指標如表1所示。
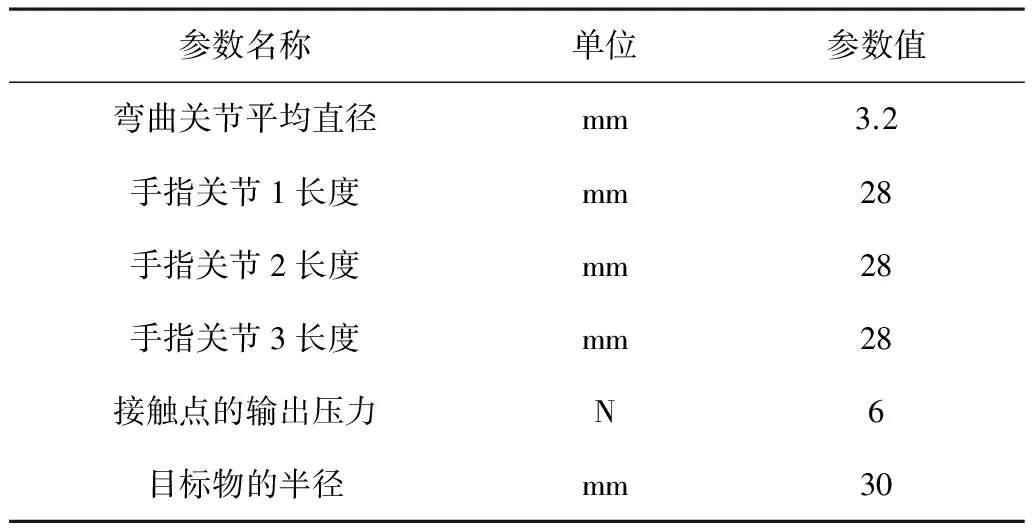
表1 采摘機械手各項參數指標
對機械手定量分析可以得到待采摘果實的半徑對手指關節角的影響,通過對3個手指關節的測試,得到了如圖8所示的結果曲線。
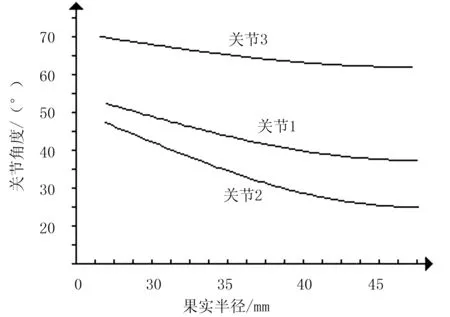
圖8 不同果實半徑下關節彎曲角度曲線
由圖8可以看出:隨著待采摘果實目標半徑的增大,機械手抓取關節角度有所減小。為了進一步研究待采摘果實半徑和機械手指抓取關節的形狀關系,計算了不同果實半徑下的關節內腔壓力曲線,如圖9所示。

圖9 不同果實半徑下手指內腔的壓力曲線
由圖9可以看出:隨著待采摘果實目標半徑的增大,機械手抓取關節手指內腔的壓力有所降低,因此在進行手指優化時,可以結合壓力和果實的半徑進行結構尺寸的優化。
4 結論與討論
為了提高采摘機械手對不同果實的自適應能力,使采摘手指具有動作靈活好多自由度等特性,設計了一種新型的多指多關節采摘機械手,并從靜力學的角度建立了彎曲關節的轉角及輸出力的靜態模型,對多指和多關節的受力進行了多目標優化。對采摘機械手的采摘性能進行了實驗研究,結果表明:隨著待采摘果實目標半徑的增大,機械手抓取關節角度有所減小,機械手抓取關節手指內腔的壓力有所降低。由于時間和篇幅的限制,本研究只進行了初步的手指關節角度和內腔壓力的測試,從后續的研究中,將通過大量的實驗來優化機械手的尺寸,使其可以在實際生產中應用。
[1] 熊俊濤,鄒湘軍,陳麗娟,等.采摘機械手對擾動荔枝的視覺定位[J].農業工程學報,2012,28(14):36-41.
[2] 呂繼東,趙德安,姬偉,等.采摘機器人振蕩果實動態識別[J].農業機械學報,2012,43(5):173-196.
[3] 錢建平,楊信廷,吳曉明,等.自然場景下基于混合顏色空間的成熟期蘋果識別方法[J].農業工程學報,2012,28(17):137-142.
[4] 顧寶興,姬長英,王海青,等.智能移動水果采摘機器人設計與試驗[J].農業機械學報,2012,43(6):153- 160.
[5] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012, 43(3):163-167.
[6] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12): 165-170.
[7] 李寒,王庫,曹倩,等.基于機器視覺的番茄多目標提取與匹配[J].農業工程學報,2012,28(5):168-172.
[8] 王祖溫, 隋立明, 包鋼.氣動肌肉驅動關節的輸入整形研究[J]. 機械工程學報, 2005, 41(1):66-70.
[9] 于蓮芝, 顏國正, 王瑞祥.用于呼吸道直接監測的柔性微機器人系統[J].機器人,2006,28(3):269-274.
[10] 章軍,須文波.一種氣-液復合驅動柔性關節的建模與動態仿真[J].中國機械工程,2006,17(15):1567- 1571.
[11] 馬履中,楊文亮,王成軍,等.蘋果采摘機器人末端執行器的結構設計與試驗[J].農機化研究,2009,31(12): 65-67.
[12] 楊慶華,金寅德,錢少明,等.基于氣動柔性蘋果采摘末端執行器研究[J].農業機械學報,2010,41(9): 154-158.
[13] 周兵,何晶.模擬手枸杞采摘機設計[J].農業工程學報, 2010, 39(增刊): 13-16.
[14] 魏澤鼎,賈俊國,王占永.基于視覺傳感器的棉花果實定位方法[J].農機化研究,2012,34(6):66-68.
[15] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012,43(3): 163-167.
[16] 馬锃宏,李南,王漢斌,等.溫室株間電驅鋤草控制系統設計與試驗[J].農業機械學報,2015,46(1):89-93.
[17] 張二鵬,馬锃宏,耿長興,等.溫室懸掛噴施機跨壟作業控制系統設計[J].中國農業大學學報,2013,18(6): 170-174.
[18] 馬锃宏,李南,李濤,等.缽體苗帶式供苗移栽機的設計與試驗[J].中國農業大學學報,2015,20(3):216-222.
[19] 張春龍,黃小龍,劉衛東,等.苗間鋤草機器人信息獲取方法的研究[J].農業工程學報,2012,28(9):142- 146.
[20] 胡煉,羅錫文,曾山,等.基于機器視覺的株間機械除草裝置的作物識別與定位方法[J].農業工程學報,2013,29(10):12-18.
[21] 朱鳳武,于豐華,鄒麗娜,等.農業機器人研究現狀及發展趨勢[J].農業工程,2013,3(6):10-13.
[22] 吳巖,杜立宇,高明和,等.農業面源污染現狀及其防治措施[J].農業環境與發展,2011(1):64-67.
[23] 楊慧,劉立晶,劉忠軍,等.我國農田化肥施用現狀分析及建議[J].農機化研究,2014,36(9):260-264.
[24] 張霞,蔡宗壽,李歡.我國化肥生產能源消費現狀分析[J].現代化工,2014,34(10):12-15.
[25] 付麗霞,李云樂.農業面源污染的現狀、問題及對策探析[J].食品安全質量檢測學報,2014,5(7):2285- 2289.
[26] 欒江,仇煥廣,井月,等.我國化肥施用量持續增長的原因分解及趨勢預測[J].自然資源學報,2013,28 (11):1869-1878.
[27] 沈德軍.農作物葉面施肥的意義、機理及技術要點[J].安徽農學通報,2012,18(12):111-112.
[28] 魚彩彥.葉面施肥技術在農業生產中的應用.農業與技術,2013,33(12):30.Abstract ID:1003-188X(2017)05-0249-EA
Design for Multi-fingered Picking Manipulator Based on FPA Control System
Shen Yige, Yuan Zhu
(Henan Polytechnic Institute, Nanyang 473000,China)
In view of the traditional mechanical gripper are holding a single action, less degrees of freedom and general poor shortcomings, a model driven directly by the FPA of multi finger articulated picking manipulator is designed, so as to effectively improve the flexibility of the mechanical hand movements and of different fruit picking the adaptive ability. From the static point of view, the establishment of a joint bending angle and the output force of the static model, and the multi-objective optimization method was proposed to the optimization design of the uniformity of the force on each key, and output force characteristics of three degree of freedom finger was analyzed. The experimental method to establish the manipulator for Apple grasping experiments, experimental results of pressure value and the grasping ability between. The results show that with be picking fruit target radius increases, the manipulator joint angle decreases, manipulator finger joint cavity pressure decreases, is a new type of picking manipulator research provides a theoretical and technical reference for reference.
multi-fingered manipulator; multi-objective optimization; FPA driver; holding capacity; freedom degreeaz
2016-03-10
河南省自然科學基金項目(2015GZC155);南陽市科技攻關(KJGG36)
申一歌(1982-),女,河南南陽人,講師,碩士研究生。
袁 鑄(1982-),男,河南南陽人,講師,碩士,(E-mail)yuanzhu1982@hnpi.cn。
S225;TP273
A
1003-188X(2017)05-0249-04
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
