四輪轉向液壓底盤自動駕駛系統設計
2017-12-16 09:15:59范曉冬魏新華
農機化研究 2017年5期
關鍵詞:系統
范曉冬,魏新華
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
?
四輪轉向液壓底盤自動駕駛系統設計
范曉冬,魏新華
(江蘇大學 現代農業裝備與技術教育部重點實驗室,江蘇 鎮江 212013)
針對“精準農業”的作業需求,為提高植保機械的作業精度,降低駕駛人員的工作強度,設計了一種四輪轉向液壓底盤自動駕駛系統。該系統主要由車載電腦、行車控制器、RTK-DGPS采集裝置、電控液壓轉向裝置及行車狀態采集裝置等組成。行車狀態采集裝置采集行車參數信息并基于iCAN通信協議進行系統通信。車載電腦根據導航控制模型和各傳感器實時參數生成控制指令,行車控制器根據車載電腦指令根據四輪車運動模型生成電控信號,并通過各電磁閥控制液壓馬達和轉向油缸實現對底盤4個輪的轉向。試驗結果表明:當底盤前進速度為2m/s時,平均跟蹤誤差不超過0.04m。
四輪轉向;液壓系統;CAN總線;RTK-DGPS;自動駕駛
0 引言
農業機械智能化、自動化是“精準農業”的發展方向。農用拖拉機自動駕駛技術的應用可大大減輕駕駛人員的勞動負荷,有效避免作業過程中銜接行產生的遺漏和重疊現象,提高了作業精度和作業效率[1-2]。
近年來,國內外學者在自動導航駕駛方面進行了深入研究。德國Hohenheim[3]大學在飼料收割機上開發了一套自動駕駛系統,采用天寶7400型RTK-GPS定位,以簡化三輪車模型為基礎設計了轉向控制器,實現自動轉向駕駛。羅錫文等[4]基于 RTK-DGPS在東方紅 X-804 拖拉機上開發了一套自動導航控制系統,建立了拖拉機直線跟蹤的導航控制傳遞函數模型。其中,轉向輪偏角檢測傳感器和電控液壓轉向裝置構成轉向輪偏角的閉環控制回路,該回路可根據導航控制器提供的期望轉向輪偏角實現偏轉角的隨動控制。周建軍等[5]在四輪電動車上開發一套自動駕駛系統,采用模糊控制算法進行轉向控制,基于CAN總線通信,由脈沖信號控制步進電機實現電動車的轉向控制。
當前,自動導航自動駕駛技術已比較成熟,如拓普康System150自動駕駛系統、合眾思壯公司推出的Hemisphere“壁虎”農機自動駕駛系統及中海達公司推出的基于北斗導航的農用拖拉機自動導航駕駛系統。但以上系統大多針對的是兩輪驅動兩輪轉向的農用機械。四輪驅動四輪轉向底盤相較于兩輪轉向底盤通過性強、轉向半徑小、操作靈活,但對四輪驅動四輪轉向底盤自動駕駛系統未的研究報道較少。因此,本文在國內現有研究的基礎上,設計了一套四輪轉向的液壓底盤自動駕駛系統[5-8]。
1 系統整體結構
自動駕駛底盤主要包括動力系統、制動系統、轉向控制系統及自動駕駛控制系統等,如圖1所示。動力系統主要包括液壓馬達和減速機。該底盤為四輪驅動,故每個車輪都配有一個插入式液壓馬達。轉向控制系統由機械轉向裝置和轉向油缸組成。由轉向油缸的伸縮變化帶動轉向搖臂,使車輪圍繞轉向節軸線旋轉, 實現四輪獨立轉向。

圖1 底盤總體布置示意圖
自動駕駛電控系統主要由車載電腦、RTK-DGPS信號接收單元、底盤姿態信息采集單元(四輪轉向角、橫擺角速度等)、底盤瞬時速度采集單元、行車控制單元及轉向控制單元等組成,如圖2所示。各模塊單元通過CAN總線進行連接,形成分布式控制系統。車載電腦預裝有WinCE5.0和嵌入式GIS系統(北京超圖軟件Supermap5.0),RTK-DGPS采集底盤實時位置信息,并通過RS-232接口將信息傳輸給車載電腦,車載電腦通過GIS系統將當前位置信息和規劃行車路徑進行比較,并由導航控制模型計算車輪的期望轉角,將該期望轉角和角度傳感器測得的轉向輪實際偏角輸入到行車控制器內;行車控制器根據運動學模型計算轉向控制量,進而控制液壓元件,使其按期望的轉角進行轉動,從而實現自動駕駛。
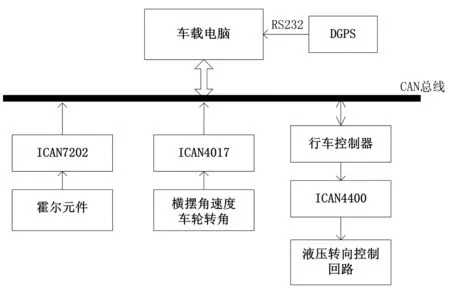
圖2 自動駕駛控制系統總體設計框圖
1.1 RTK-DGPS信號接收單元
為滿足“精準農業”的作業精度需求,本系統采用天寶公司5700型 GPS 接收機系統,其支持RTK-DGPS 定位,水平定位精度誤差為固定誤差1cm加每公里動態誤差1mm,垂直定位精度誤差為固定誤差2cm加每公里動態誤差1mm,動態延遲小于20ms。
1.2 速度采集單元
由于是四輪驅動轉向底盤,所以需檢測所有車輪轉速,在每個車輪上均勻布置磁鋼,霍爾傳感器分別固定在底盤機架上。當車輪轉過一個磁鋼時,就會輸出一個脈沖信號,iCAN-7202模塊可檢測脈沖信號,并由CAN總線接口傳輸到車載電腦中,可得底盤車輪瞬時前進速度為
(1)
式中vi—所測車輪瞬時線速度(m/s);
d—所測車輪的直徑(m);
f—脈沖頻率(Hz);
n—每個車輪上磁鋼數;
δ—檢測車輪的滑轉率(%)。
底盤設計行駛速度不大于7.5 km/h,且采用四輪驅動、四輪轉向,主要在低速區行駛,可用2個iCAN-7202測頻模塊采集4個車輪瞬時線速度,將采集的4個車輪的平均線速度作為車輛行駛速度V,則有
(2)
其中,vi為各車輪瞬時轉速。
1.3 行車控制器及信號采集單元
行車控制器需運行農機運動學模型,輸出液壓轉向電流控制參數,需有較強的計算能力并具備CAN總線接口。因此,采用DSP56F805芯片,該芯片融合微控制器和DSP的點,具有較快的運算能力,并配置8路12位精度的A/D轉換模塊,支持CAN2.0B協議。
iCAN-4017模塊具有8路模擬量輸入通道,模擬量信號的分辨率為16位[9],用于采集車輪轉角信息。
iCAN-7202模塊具有2路正脈沖計數器,最大檢測脈沖頻率為100kHz,用于采集霍爾傳感器的脈沖信號。
iCAN-4400模塊具有4路模擬量輸出通道,可輸出電壓或者電流信號,用于輸出各比例電磁閥的控制信號。
底盤實時參數采集和行車控制程序基于微軟公司的Embedded visual C++4.0軟件開發平臺進行開發。
2 液壓轉向控制系統
液壓轉向控制系統主要由定量齒輪泵、電液比例換向閥和轉向油缸組成,如圖3所示。由定量齒輪泵經過濾器對轉向油缸供油,定差溢流閥的作用是調節泵出口壓力與負載壓力相匹配。行車控制器通過iCAN-4400輸出模擬量控制信號給4路電液比例換向閥,換向閥動作,使得控制車輪的轉向油缸行程改變,推動轉向搖臂,實現車輪圍繞轉向軸轉動,進行轉向。
3 行車控制模型
3.1 四輪轉向二自由度力學模型
傳統的2WS汽車只有前輪作主動轉向動作,后輪只作隨動運動,使汽車的轉彎半徑較大,轉向不靈活。在田間作業時,作業環境復雜,較大的轉彎半徑可能造成作業過程中的遺漏和重疊現象。四輪轉向的目的在于使汽車低速轉向行駛時前后輪作逆向偏轉,可減小汽車的轉彎半徑,獲得良好的機動性。本文涉及的底盤主要在田間作業,設計最高行駛速度為7.5km/h,在低速區工作,因此在田間作業時采用四輪轉向系統,可有效增加機組作業穩定性,減小轉彎半徑。
由于本文的控制對象是4WS移動底盤,以二自由度的4WS動力學模型作為研究基礎,該模型雖經過簡化,但經證實可以反映4WS汽車的基本運動特性[10]。
該模型如圖4所示。
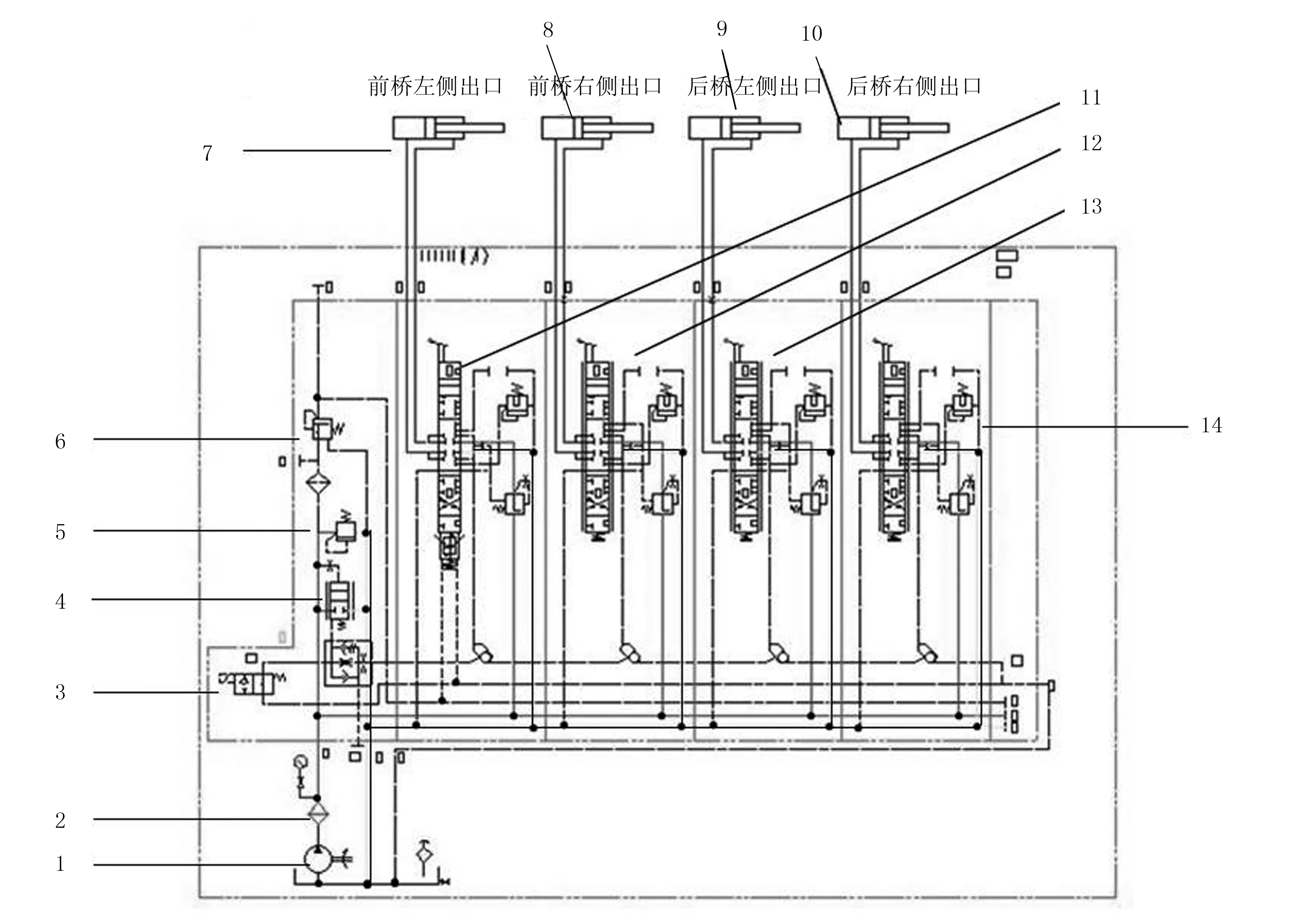
1.定量齒輪泵 2.過濾器 3.電磁球閥緊急泄荷 4.定差溢流閥 5.安全閥 6.三通減壓閥 7.轉向油缸1 8.轉向油缸2 9.轉向油缸3 10.轉向油缸4 11.電液比例換向閥1 12.電液比例換向閥2 13.電液比例換向閥3 14.電液比例換向閥4
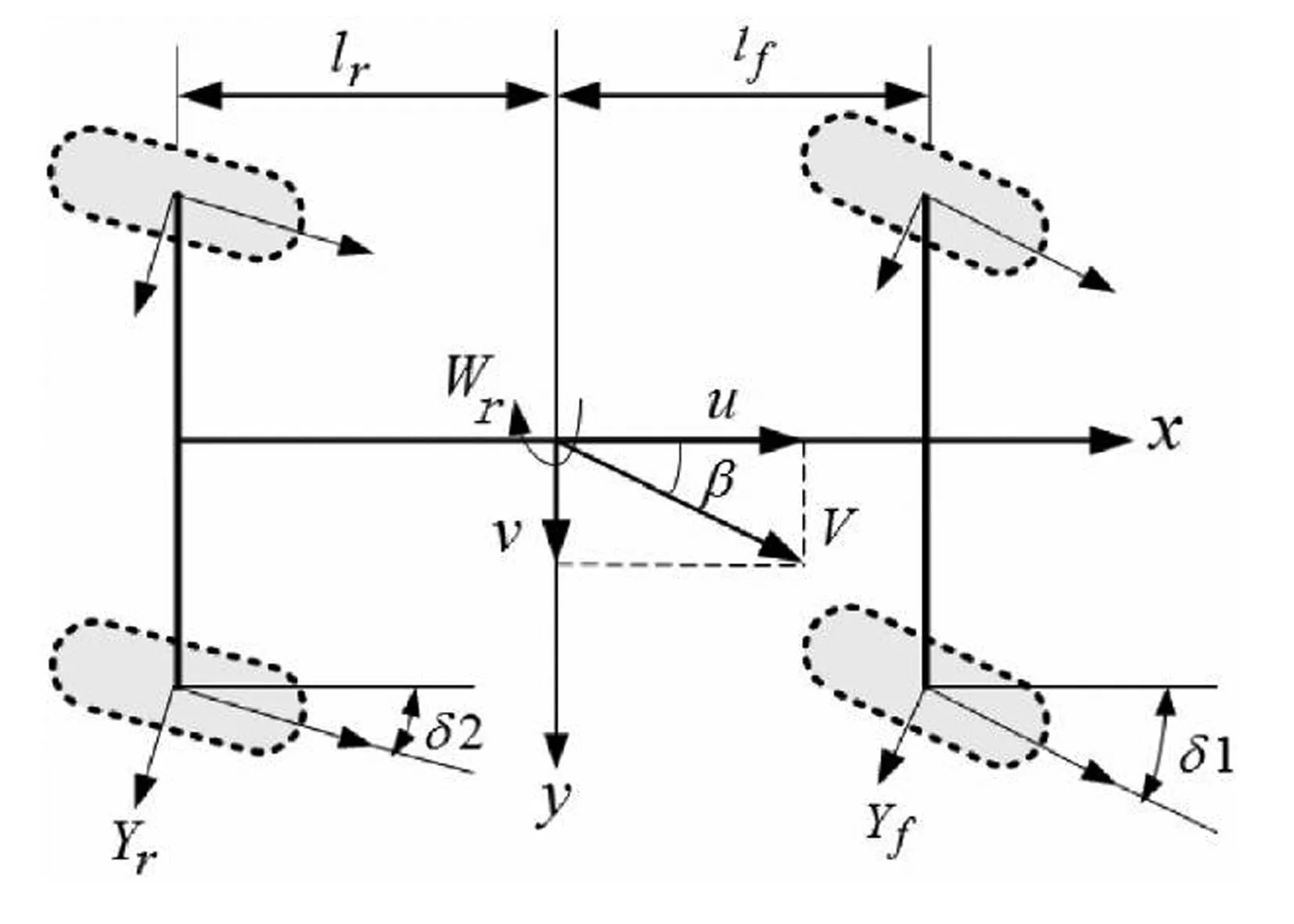
圖4 拖拉機二自由度四輪轉向模型
其由側向運動與橫擺運動方程構成,其動力學方程為[11]
k1δ1+k2δ2
(3)
lfk1δ1+lrk2δ2
(4)
式中k1—前輪輪胎剛度;
k2—后輪輪胎剛度;
u—縱向車速;
Iz—車身橫擺慣量;
lf—質心到前軸距離;
lr—質心到后軸距離;
ωr—橫擺角速度;
δ1—前輪轉角;
δ2—后輪轉角;
v—車身側向速度。
本文涉及的底盤,作業速度不超過7.5km/s,因此控制系統可采用前輪轉角比例前饋的控制方法:令δ2=kδ1[12],在低速時,k值應為負(前后輪偏轉方向相反)、有效減小了轉彎半徑,提高了操作靈活性。
(5)
由式(5)可知:為使農機在轉向時可以保持質心側偏角為0,k要跟隨u變化,采用前輪轉角比例前饋的控制方法,車輛質心側偏角為0,則有u=V(汽車實時車速)。
3.2 基于預瞄點的導航追蹤模型
在自動駕駛時,導航系統在擬合好的曲線上按一定步長選取節點,作為行駛的預描點[13]。直線行駛時,為了保持較穩定的行駛狀態,要求兩相鄰預瞄點之間的距離不能太小;在轉向行駛時,無人車以低速行駛確保安全性,相對于直行行駛需要更多預瞄點指引,要求兩相鄰預瞄點之間的距離不能太大。從節點中篩選出在導航中更有實用價值的轉向點,進而簡化直線道路的預瞄點,為后期的導航提供便捷。
假定篩選出的第n個轉向點用Pn表示,令無人車初始位置為第一個轉向點即P1,判定節點ai是否為轉向點的具體步驟如下:
1)前一轉向點Pn、當前節點ai和下一節點ai+1,依次構成向量Ai、Ai+1,并求兩向量夾角Φ;
2)比較Φ與預先設定閾值角度β的大小,若滿足條件Φ≤β,則ai不是轉向點;若Φ>β,則ai為轉向點Pn+1;
3)重復步驟 1)~2)依次判定各個節點是否為轉向點。
圖5舉例說明了轉向點篩選方法。由P1、a1、a2依次組成的兩向量夾角很小,不滿足轉向點條件,a1不是轉向點。接著,計算由a1、a2、a3構成兩向量的夾角Φ,結果Φ大于設定閾值角度β,a2為轉向點P2。P2、a3、a4組成的兩向量夾角滿足轉向點條件,a3為轉向點。
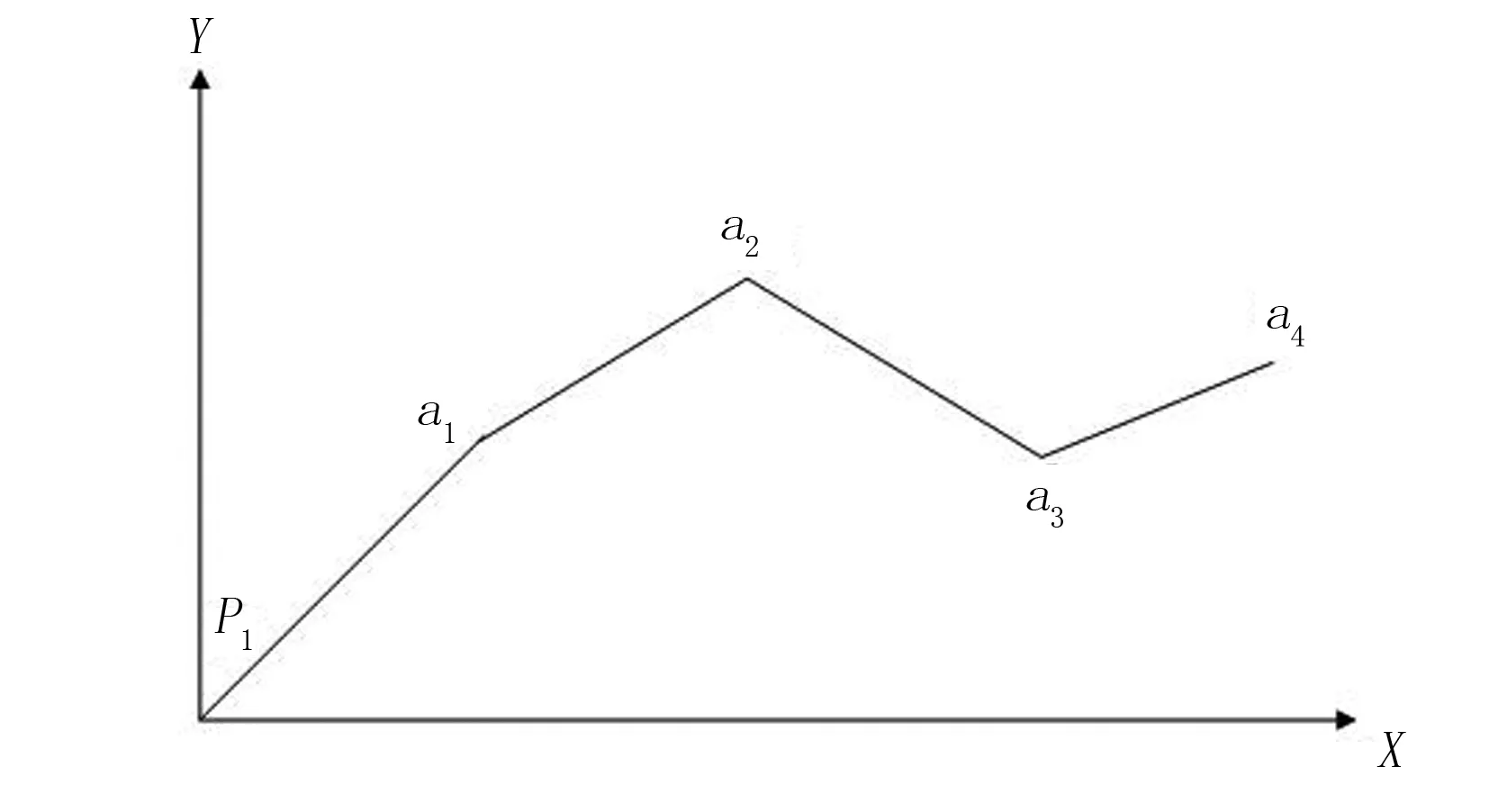
圖5 轉向節點篩選示意圖
3.2.1 直線導航
在當地水平坐標系中直線導航涉及無人車實時坐標點、上一時刻坐標點和預瞄點,假設無人車某一時刻坐標點(X,Y)位于已知上一時刻節點(X1,Y1)和預瞄點(X2,Y2)之間,如圖 6所示。Ψ代表理想行駛軌跡(X1,Y1)→(X2,Y2)與X軸正向夾角;β代表實際行駛軌跡(X1,Y1)→(X,Y)與X軸正向夾角;θ代表(X1,Y1)→(X,Y) 與X軸正向夾角;L代表無人車當前點(X,Y)到預瞄點(X2,Y2)的距離。
由圖6可知
(6)
(7)
各參數確定后可求得以下所需變量,車輛航向與期望行駛軌跡夾角為
ε=θ-β
(8)
無人車當前點到預瞄點的距離L為
(9)
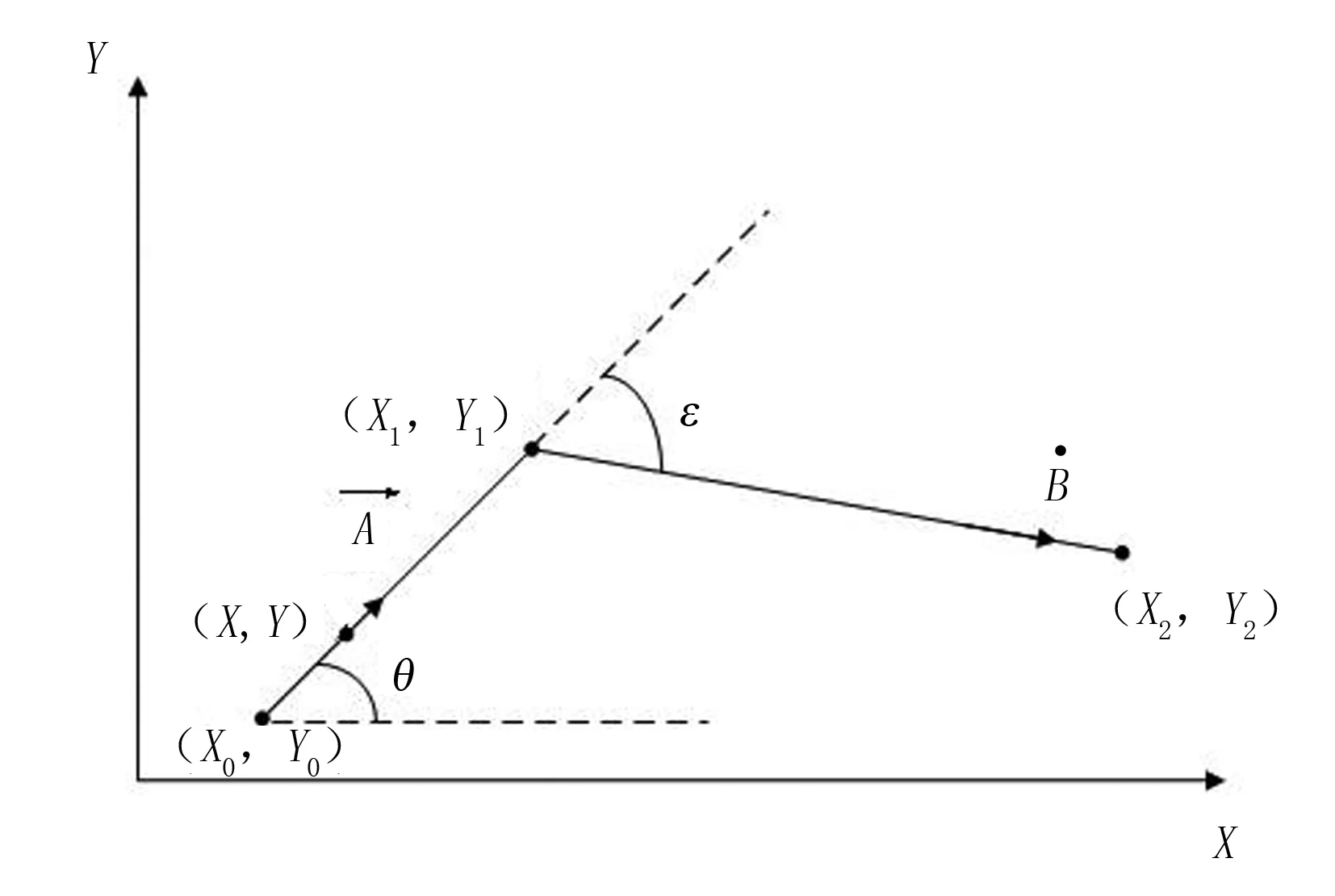
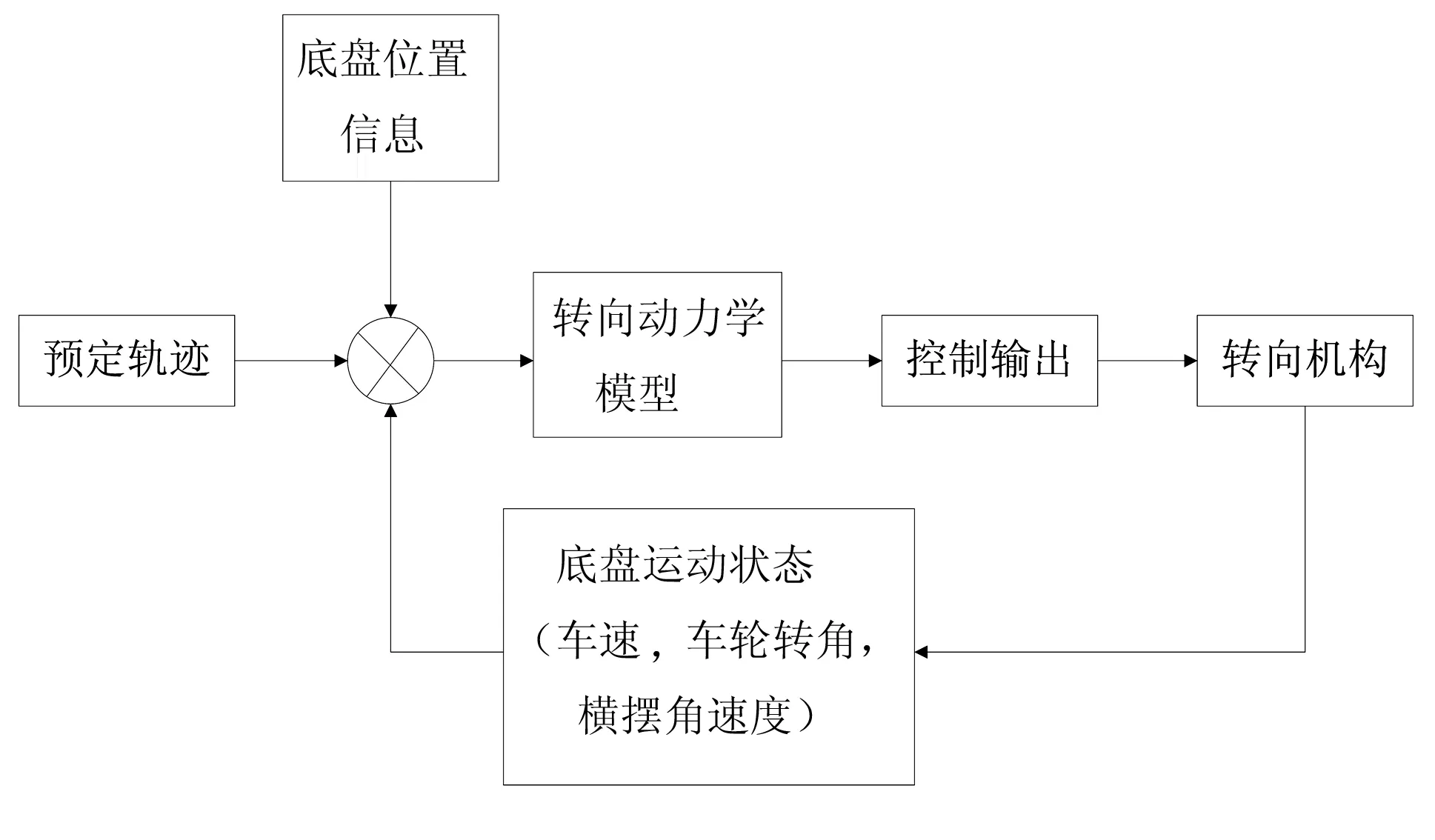
變量L作為選擇下一預瞄點的依據,隨著無人車的行駛,無人車距當前預瞄點的距離L逐漸變小,當L小于一定值 d(預定的判斷閾值),即L 圖6 直線導航原理圖 3.2.2 轉向導航 直線上行駛的無人車到達轉向點附近,當兩者距離小于d,進入轉向導航模式,已知轉向點(X1,Y1)、下一節點 (X2,Y2)、無人車某一時刻的坐標點(X,Y)和無人車上一時刻節點(X0,Y0),如圖 7 所示。 圖7 轉向導航原理圖 θ代表無人車當前的航向角,則有 (10) 無人車實際期望轉向角ε計算公式為 (11) 無人車當前點到轉向點的距離L為 (12) 變量L作為轉向導航模式的依據,隨著無人車的行駛,無人車距轉向點的距離L逐漸變小;當L小于一定值d,即L 本文涉及的底盤:m=3 000kg,Lf=1.5m,Lr=1.4m,k1=4 800N/rad,k2=4 400N/rad,Iz=2 000kg· m2。 導航控制方法如圖8所示。車載電腦基于預瞄追蹤導航模型通過嵌入式GIS系統(Supermap5.0)解譯規劃路徑和接收的DGPS位置信息行比較,得出車輛期望轉角。由期望轉角ε與前輪當前轉角的差值,得出前輪實際控制轉角δ1;并通過CAN總線傳輸到行車控制器,行車控制器由霍爾傳感器測得車速V,根據四輪轉向比例前饋控制方法,得出后輪控制轉角δ2;由行車控制器發出控制指令,控制電磁閥動作,進而控制車輪的轉向油缸進行伸縮變化,實現自動轉向。 圖8 導航控制示意圖 本系統將RTK-DGPS信息通過RS-232接口傳輸到車載電腦,再將各傳感器采集的信息以iCAN報文的形式通過CAN總線傳輸到車載電腦;車載電腦根據導航控制模型和規劃路徑進行比較,生成行車控制指令,以iCAN報文形式傳輸給行車控制器;通過行車控制器分別對4個車輪的液壓系統進行控制,實現對液壓底盤的自動駕駛控制。 將設計的自動駕駛控制系統進行路徑跟蹤試驗。試驗安排在江蘇大學農裝大院內進行,在2m/s車速條件下,直線跟蹤的最大橫向偏差為13cm,平均誤差為3.8cm,如圖9所示。 圖9 直線跟蹤結果 測試結果表明:本駕駛系統可在柏油路面沿規劃路徑行駛,可以將其推廣并在田間進行試驗。 本文設計了四輪轉向液壓底盤自動駕駛系統。該系統由RTK-DGPS采集底盤實時位置信息,由 RS-232接口傳輸到車載電腦,車載電腦將當前位置信息和規劃路徑進行比較,并由基于預瞄點的導航算法計算出車輪的期望偏角;將該期望偏角和車輪當前偏轉角由CAN總線傳輸到行車控制內,并根據四輪轉向二自由度力學模型計算出合適的偏轉控制量控制液壓元件,實現對車輪轉角的控制。測試結果表明:在底盤前進速度為2m/s時,平均跟蹤誤差不超過0.04m。 [1] Toru Torii. Research in autonomous agriculture vehicles in Japan[J].Computers and Electronics in Agriculture,2000,25: 133 -153. [2] Reid J F, Zhang Q, Noguchi N, et al. Agricultural automatic guidance research in North America[J].Computers and Electronics in Agriculture, 2000, 25(1/2): 155-167. [3] CHO SJ,KINH. Autonomous speed sprayer guidance using machine vision and fuzzy logic[J].ASAE 1999(4) 1137-1143. [4] 羅錫文, 張智剛. 東方紅 X-804 拖拉機的 DGPS 自動導航控制系統 [J].農業工程學報,2009,11(25):139-145. [5] 周建軍,張漫,汪懋華.基于模糊控制的農用車輛路線跟蹤[J].農業機械學報,2009,40(4):152-156. [6] 聶海強,張陌陽,李正仁.國內水田機械研究現狀[J].現代化農業,2011(1):7-9. [7] 侯占峰,魯植雄. CAN總線技術在拖拉機上的應用展望[J].農機化研究, 2006(10): 184 -186. [8] 吳鋒,孫俊,馮安. CAN總線在拖拉機檢測線中的應用設計[J].農業工程學報, 2005, 21(6): 74 -76. [9] 周立功,等. iCAN現場總線原理與應用[M].北京:北京航空航天大學出版社,2007. [10] Sano S, Furukawa Y, Shlralshis. Four Wheel Steering System with Rear Wheel Steer Angle Controlled as a Function of Steering Wheel Angle[C]//SAE Paper, 1986:860-625. [11] 喻凡,林逸. 汽車系統動力學[M].北京:機械工業出版社,2005. [12] 《汽車工程手冊》編輯委員會.《汽車工程手冊》設計篇[K].北京:人民交通出版社,2001. [13] Zhen jia Arjunal Balasuriya,Subhash Challa.Autonomous Vehicles Navigation with Visual Target Tracking:Technical Approaches [J].Algorithms, 2008,1 (2):153. Design of Four Wheel Steering Hydraulic Chassis Automatic Driving System Fan Xiaodong, Wei Xinhua (Key Laboratory of Modern Agricultural Equipment and Technology, Jiangsu University, Zhenjiang 212013,China) According to the operation requirement of "precision agriculture", in order to improve the accuracy of the plant protection machinery operation, reduce the work intensity of drivers, this paper designs a kind of four wheel steering hydraulic chassis automatic driving system. This system mainly includes the vehicle computer, the driving controller, the RTK-DGPS collection device, the electric control hydraulic steering device, the driving state collection equipment and so on. The driving state acquisition device collects the driving parameter information and communicates with the vehicle computer based on the iCAN communication protocol . The on-board computer according to the navigation control model of each sensor and real-time parameters to generate a control command, the driving controller according to the instructions of the on-board computer according to four wheel vehicle motion model to generate control signals and through the electromagnetic valve control hydraulic motor and steering oil cylinder on the chassis of a four wheel steering control. Test results showed that: when forward speed is 2 m/s, the average tracking error is no more than 0.04m. four-wheel steering; hydraulic system; CAN-bus;RTK-DGPS; auto matic driving 2016-04-14 國家“863計劃”項目 (2013AA 102307);江蘇省農業科技支撐計劃重點項目(BE2013401 );江蘇高校優勢學科建設工程資助項目(蘇政辦[2014]37號) 范曉冬(1990-),男,南京人,碩士研究生,(E-mail) 1246172740@qq.com。 魏新華(1972-),男,山東濱州人,研究員, 博士,博士生導師,(E-mail)18361810295@163.com。 S219.032;S49 A 1003-188X(2017)05-0253-06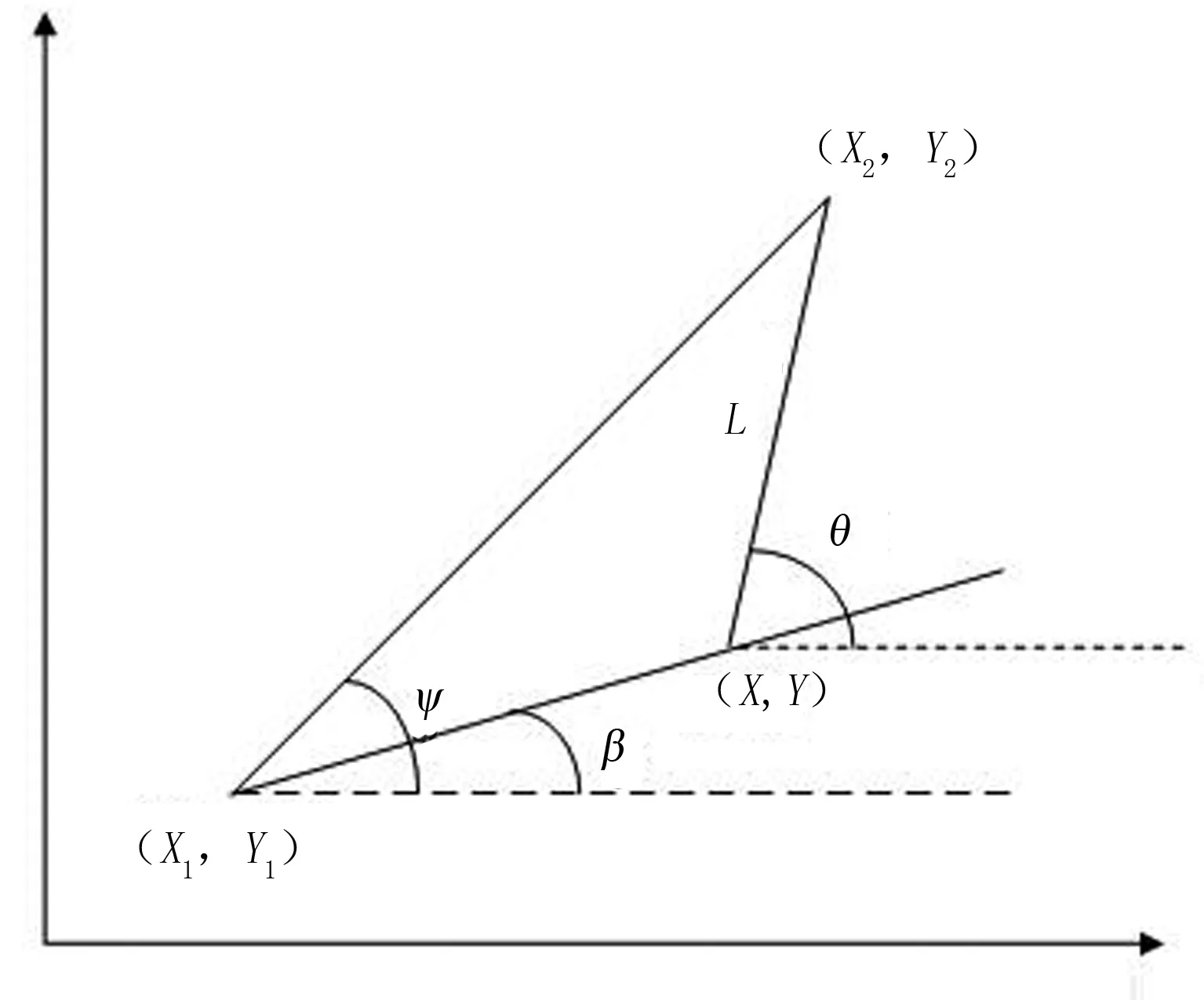

4 通信測試與導航試驗

5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
