農業機器人軌跡優化自動控制研究—基于BP神經網絡與計算力矩
2017-12-16 07:01:36申一歌
農機化研究 2017年6期
袁 鑄,申一歌
(河南工業職業技術學院,河南 南陽 473000)
?
農業機器人軌跡優化自動控制研究
—基于BP神經網絡與計算力矩
袁 鑄,申一歌
(河南工業職業技術學院,河南 南陽 473000)
以農業機器人精密軌跡優化自動控制為目標,在優化算法中引入BP神經網絡與計算力矩法結合的自動控制器,旨在減少作業過程中的運動誤差,提高其工作效率。首先,建立農業機器人數學模型,分析其運動學和動力學原理;然后,設計了農業機器人運動控制系統,引入BP神經網絡對不確定動力學因素進行判斷,并提出解決該因素的自適應學習法;最后,對該系統運用MatLab進行了仿真。試驗表明:以BP神經網絡與計算力矩法結合的自動控制器可以有效優化機器人運動路徑,提高機器人整體作業效率,系統運行穩定、可靠性強,且對外部環境的干擾因素具有較強的自適應學習能力。
農業機器人;精密軌跡優化;BP神經網絡;計算力矩法
0 引言
近年來,隨著新農業種植模式和計算機技術的發展,智能機器人研究有了很大的突破,機器人在農業生產中的應用越來越普及。農業機器人需要邊移動邊作業,行走路徑不僅僅是起、終點間最小距離,往往需要行走于整個作業區域,且環境一般復雜多變,因此常常需要在原規劃上實施新的優化。路徑優化是農業機器人作業過程中核心部分,其智能化主要體現在對運動范圍及作業空間的規劃上。本文采用BP神經網絡與計算力矩法結合控制系統,對農業機器人運動軌跡進行計算優化,并采用MatLab來仿真預測農業機器人在作業中可能發生的某些碰撞及成功避開障礙物,同時提供路徑優化及躲避障礙的策略。
1 BP神經網絡與計算力矩原理
1.1 BP神經網絡的結構和原理
神經網絡是由簡單處理單元構成的規模宏偉壯大且可同時進行分布處理的中心處理器,可以保存過往經驗數據和行之有效的品性。神經網絡主要從獲得知識和保存知識兩部分去模擬大腦。神經網絡獲得知識主要是通過實踐并不斷從外部學習得來了,而內部神經元的相互突觸連接則主要用來存儲信息。神經網絡的基本結果如圖1所示。
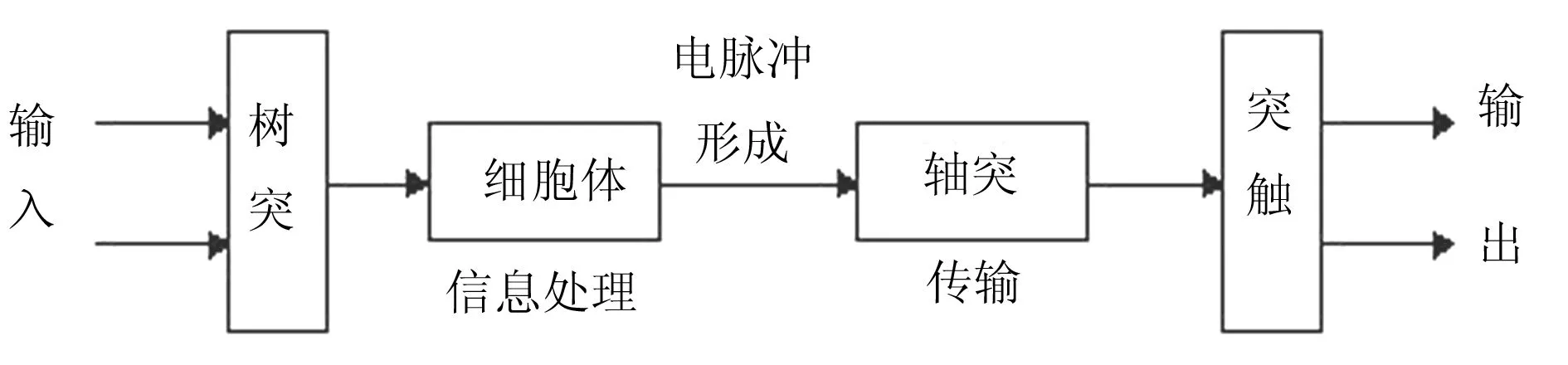
圖1 神經網絡的基本結構Fig.1 The basic structure of neural network
細胞體接受的信息一般先經樹突傳入,然后形成電脈沖由軸突傳送給另一個神經元的突觸,一直這樣依次將信息傳遞下去。
BP神經網絡是一種按誤差逆傳播算法訓練的多層前饋式網絡,能學習和存貯大量的輸入、輸出模式的映射關系,而計算前并不需要算法的具體數學方程。其基本原理為:通過對比輸出值,求出誤差值,并估計其前導層誤差;然后,用該誤差推導出更前一層的誤差,最后,依次反傳,求出其他各層的誤差估計。BP神經網絡結構如圖2所示。
BP神經網絡主要由輸入層、隱含層、輸出層組成,每兩個相鄰層的神經元都全部有關系,但同層之間無關。
假設不包含輸入層,其有N0個元,設某網絡有L層及輸出為第L層,第L層有NK個元。設uk(i)表示第K層第i神經元所接收的信息,wk(i,j)為從第k-1層第j個元到第k層第i個元的權,ak(i)為第k層第i個元的輸出,各層之間的神經元都有信息交換,則其輸入輸出關系可以表示為
(1)
則每個訓練循環中按梯度下降時,其權重迭代公式為
(2)
(3)
(1≤l≤L-1)
(4)
BP神經網絡算法的步驟為:①選定學習的數據,p=1,…,p,隨機確定初始權矩陣W(0);②用學習數據計算網絡輸出;③用(2)式反向修正,直到用完所有學習數據。
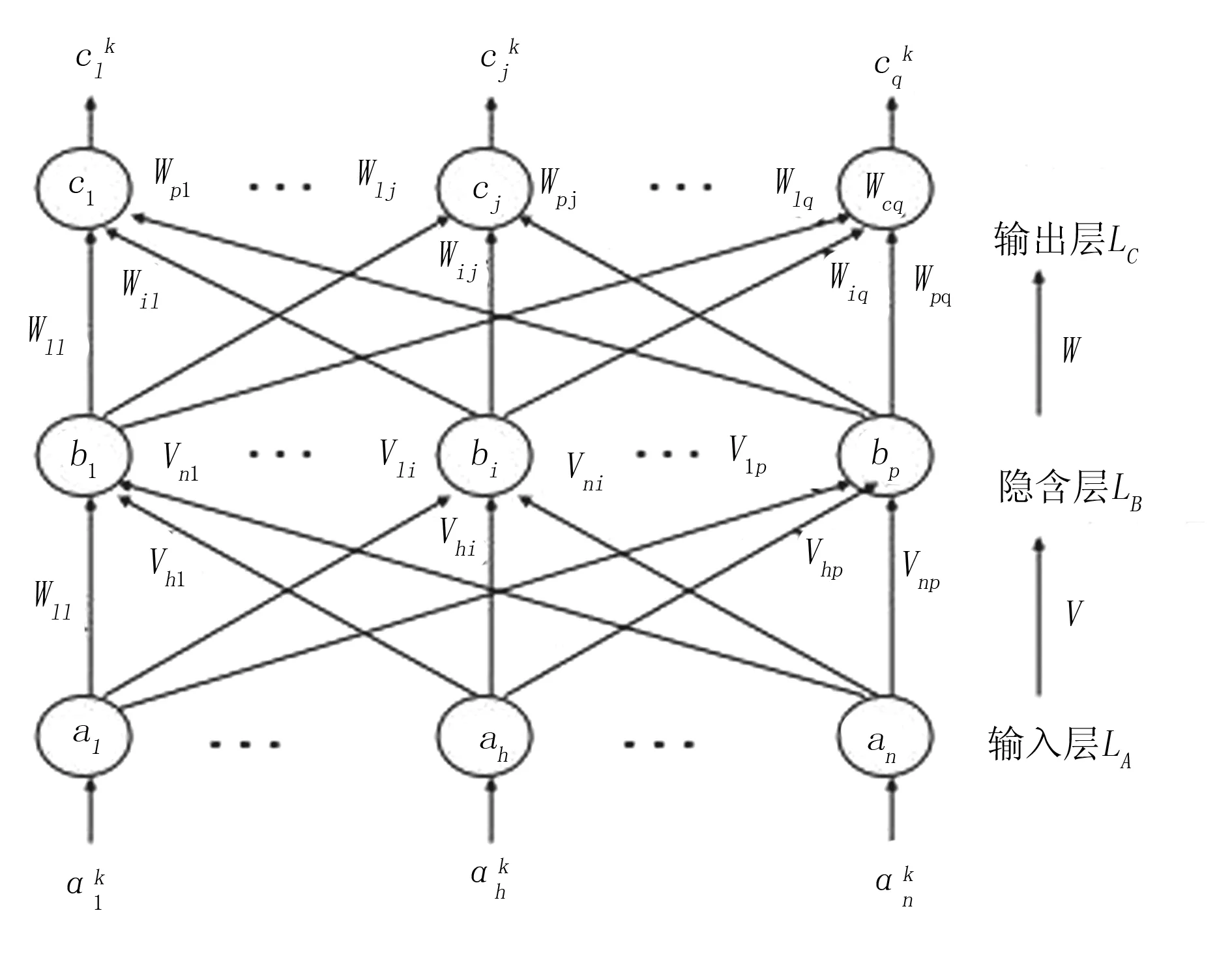
圖2 BP神經網絡結構圖Fig.2 BP neural network structure
1.2 計算力矩法原理
計算力矩一般采用前饋補償的方法消除非線性因素產生的誤差。設計控制算法時,首先應考慮需要參考的數學模型。為了最大限度減少計算量,參考模型應該滿足的方程為
(5)
其中,r(t)是一個參考輸入值,改進后有
(6)

根據改進后的參考模型,可以提出控制律為
u(t)=F1γ(t)+F2θ(t)+F3θ(t)
(7)
其中,F為N階矩陣。
假設F1=M,F2=G-MΛ0,F3=N-MΛ1,則
(8)
式(8)即為該算法的控制量。
2 建立農業機器人數學模型
建立農業機器人的數學模型是跟蹤優化其運行軌跡重要的前提,主要是根據機器人各種前行參數和控制量之間的變化關系,實現對機器人的控制,達到優化軌跡的目的。其數學模型結構如圖3所示。
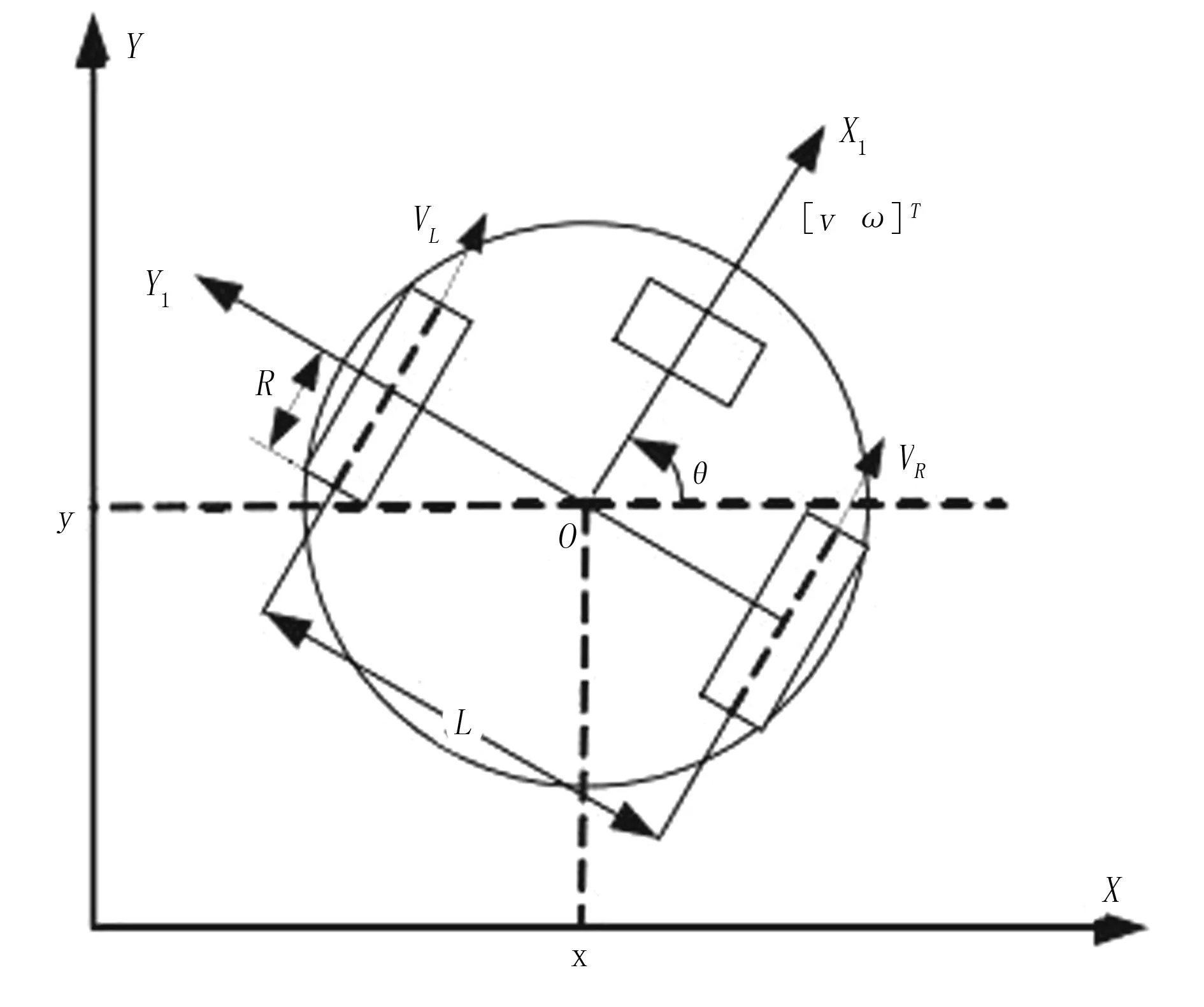
圖3 農業機器人數學模型結構Fig.3 Mathematical model structure of agricultural robot
圖3中,首先建立XOY全局坐標;然后在XOY上以其底盤質心建立X1OY1坐標系,機器人運行方向為X1OY1的X1軸方向;最后將機器人看作一個點,分析其位置和運行方向。其中,θ為橫軸與運動方向之間的方向角;[v w]r為機器人的控制參數。
2.1 農業機器人運動學模型
在農業機器人作業過程中,車輪與農田發生接觸的同時會產生滾動和滑動的現象。為了簡化問題,根據建立的數學模型,本文只選擇正常的滾動作為分析對象。
農業機器人運動學模型主要是描述其前進方向和速度之間的關系,比較直觀地將運動問題轉變為數學問題,則

(9)
(10)
其中,式(9)為機器人運動中的約束條件;式(10)為機器人的運動學模型。
農業機器人運動過程中,線速度v和角速度ω之間存在一定的關系,則
(11)
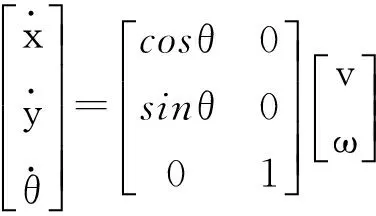
綜合上面幾個式子,可以得出農業機器人運動學模型為
(12)
2.2 農業機器人動力學模型
農業機器人動力學模型主要描述其運動方向、加速度和受力之間的關系。應用拉格朗日方程,農業機器人機械系統存在微分方程,則
(13)
根據以上定義,式(13)可改寫為如下形式,即
農業機器人動力學系統的動態方程為

(15)
定義滿秩矩陣S(q)為
S(q)=[S1(q),S2(q),...,Sn-m(q)]
(16)
則有
ST(q)A(q)=0
(17)
式(14)和式(17)結合后得到

(18)
這樣可以發現:靜態狀態反饋可以簡化為非完整約束的簡單形式,農業機器人在直角坐標系中的位置可以根據向量推導出來。其中,(x,y)為機器人的參考位置;θ為其坐標角度。農業區機器人滾動時的約束條件為
(19)
因此可以確定矩陣S(q)為
(20)
然后可以得到參考點的運動學模型
(21)
3 農業機器人控制系統的設計
一般情況下,由于系統的動力學參數常常不確定,機器人的模型精度很難已知。為了克服動力學系統中不確定的因素,本控制系統特地采用計算力矩控制器,同時加上輔助的BP神經網絡模糊控制器,通過兩者共同作用,控制系統對路徑的優化。控制系統的結構如圖4所示。
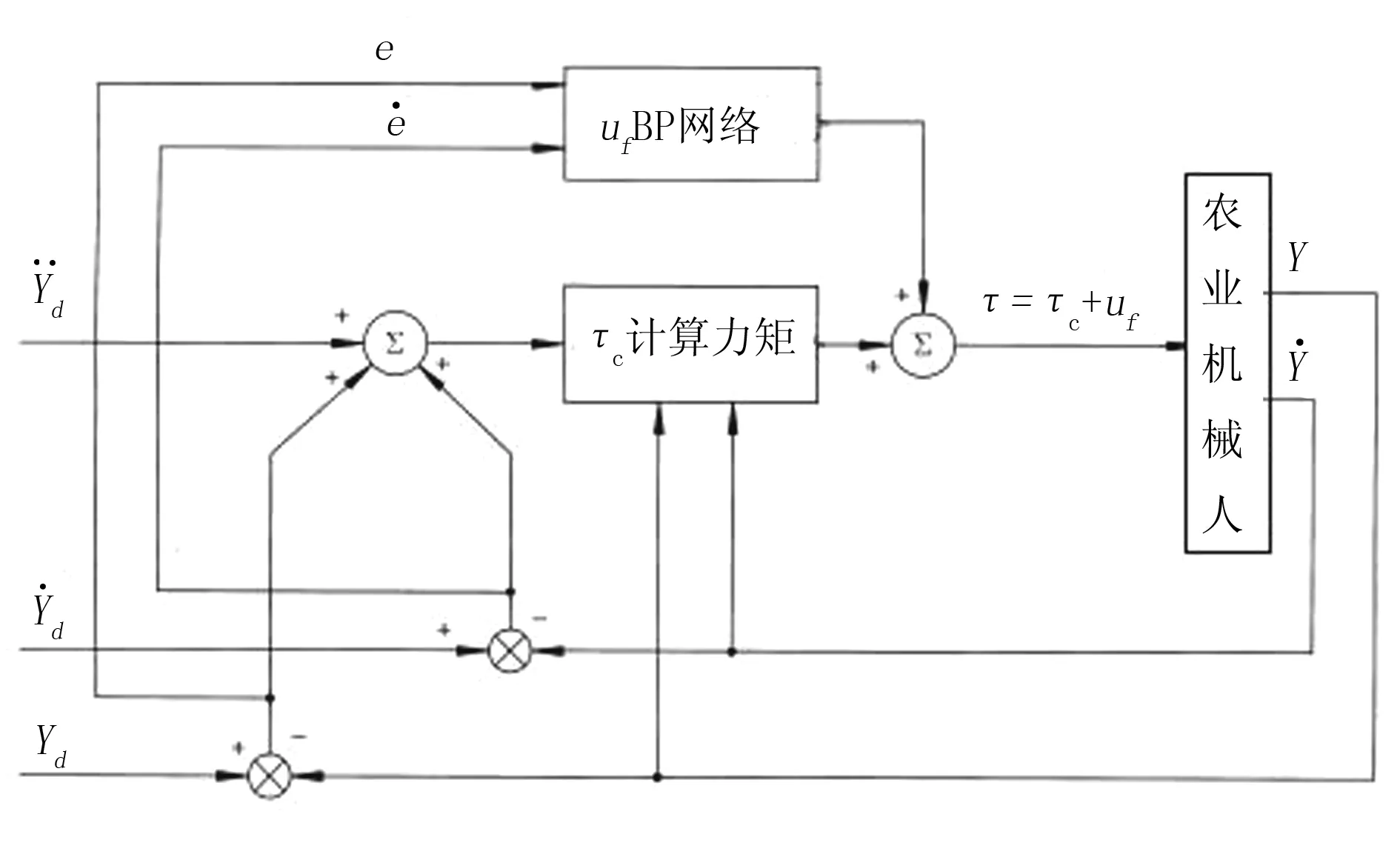
圖4 農業機器人控制系統的結構Fig.4 The control system structure of agricultural robot
由圖4可知:該系統是閉環的,系統的總控制由模糊的BP神經網絡控制和參數自適應的計算力矩控制器共同作用,可有效抑制農業機器人運動過程中產生慣性空間的不穩定因數,并保持最小的誤差值收斂精度。
4 路徑優化建模與仿真驗證
4.1 農業機器人路徑優化建模
在農業機器人尋徑避障進行路徑規劃時,其需要采用最大線速度,在所有路徑中選擇出最優運動軌跡,并根據BP神經網絡與計算力矩法復合控制系統特性,計算最優路徑的運動時間和機器人車輪的線速度,進而調整運動狀態,得到最優路徑結果。圖5農業機器人運動約束狀態圖。
圖5中,A1、A2、A3是障礙物間距離;Cp是機器人的質心。最優路徑運行所需時間為
TG=TT+TR
(22)
其中,TT為移動需要的時間;TR為旋轉所需的時間。二者分別滿足
(23)
其中,D為距離;A為角度。
根據農業機器人工作的特點及控制狀態,再考慮其他可行路徑的時間,用控制周期和線速度求解出每個運行周期內的運動距離和旋轉角度,則
(24)
其中,T為運動周期。
根據質點間的運動距離和旋轉角度,求出其農業機器人每段路徑的移動距離和旋轉角度;然后,根據新路徑優化的適應度函數,即可求出最優解。
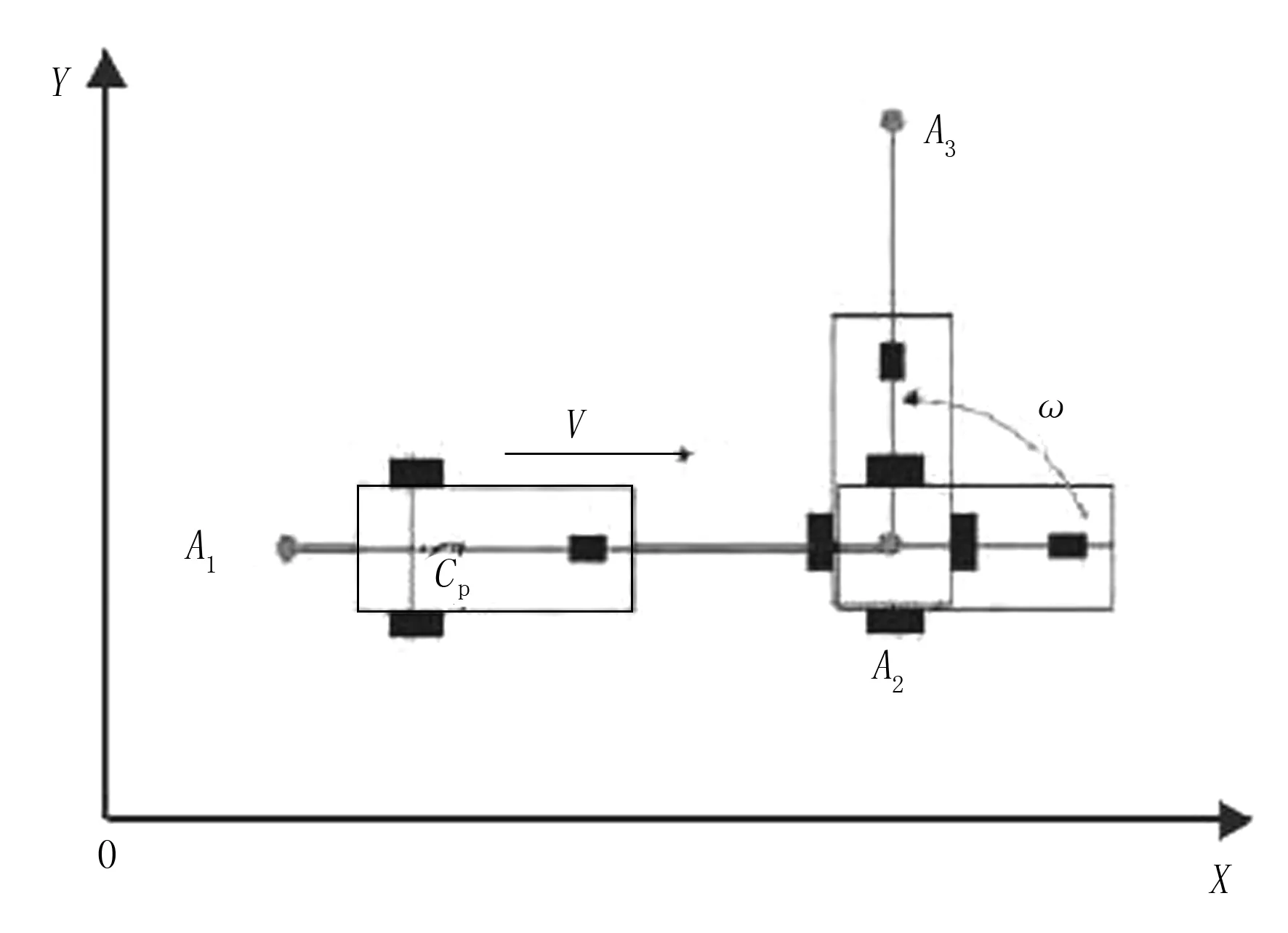
圖5 農業機器人運動約束狀態圖Fig.5 The motion constraints state map of agricultural robot
4.2 仿真驗證
為了驗證系統是否可靠,本文對所設計的控制系統進行MatLab驗證。其中,農業機器人運行環境為3m×3m的區域內,起點和終點分別為(0,0),(0,0),控制參數為0.01,初始移動方向誤差為(0,0.45)T。每次進行仿真時,反復計算100次。仿真結果如圖6所示,具體數據如表1所示。
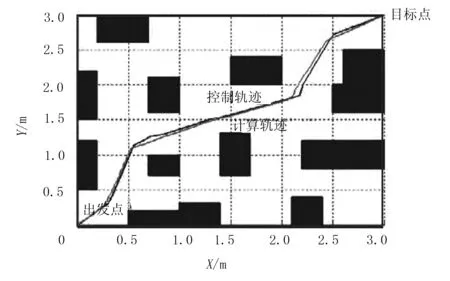
圖6 農業機器人路徑優化仿真結果Fig.6 Simulation results of path optimization for agricultural robot表1 仿真結果具體數據Table 1 Simulation results of specific data

行走距離/m行走時間/s平移時間/s旋轉時間/s軌跡優化4.6234.519.215.3
由圖6和表1可以看出:農業機器人路徑優化后的運動距離和時間都比較小,位置平均誤差僅為0.085m,且加大了機器人的回轉空間,使得運動軌跡比較圓滑,運行效率明顯提高。
5 結論
針對農業機器人在田間移動路線過長、行進代價大及路徑規劃效率低的問題,提出了基于BP神經網絡與計算力矩法復合控制農業機器人運動軌跡的研究方法,并利用MatLab對該系統進行了路徑優化仿真驗證。結果表明:該復合控制算法可以有效地優化農業機器人的移動軌跡,提高其運動效率,圓滑了農業機器人避障過程中的運動軌跡,使機器人運行效率有較大的提高;同時加強了運行過程中的穩定性,為果農節省了大量時間和經濟成本,且該系統對外部環境的不確定因素具有較強的學習能力。
[1] 萬梅芳.基于BP神經網絡的最經濟控制研究[J].無線互聯科技,2014(2):133.
[2] 王歡,王玉博,尚萌,等.輪式移動機器人的主控制器設計[J].電工文摘,2014(5):20-22.
[3] 成偉明.移動機器人自主導航中的路徑規劃與跟蹤控制技術研究[D].南京:南京理工大學,2007.
[4] 王會方.串聯機器人多目標軌跡優化與運動控制研究[D].杭州:浙江大學,2011.
[5] 王新忠.溫室番茄收獲機器人選擇性收獲作業信息獲取與路徑規劃研究[D].鎮江:江蘇大學,2012.
[6] 宋偉科.基于多機器人的開放式智能控制系統關鍵技術研究與開發[D].天津:天津大學,2012.
[7] 劉傳領.基于勢場法和遺傳算法的機器人路徑規劃技術研究[D].南京:南京理工大學,2012.
[8] 張鑫.移動機器人導航中的軌跡跟蹤與群集運動控制研究[D].西安:長安大學,2012.
[9] 過仲陽,韋桃源,李綠芊,等.BP網絡在研究地下水咸淡水界面波動中的應用—以長江河口地區第二承壓含水層為例[J].華東師范大學學報:自然科學版,2001(2):65-70.
[10] 陳衛東,董勝龍,席裕庚.基于開放式多智能體結構的分布式自主機器人系統[J].機器人,2001(1):45-50.
[11] 王樹森,趙冬玲.一種基于附加動量法的改進BP算法[J].濟源職業技術學院學報,2012(3):9-13.
[12] 姬江濤,王榮先,符麗君.輪履復合式農業機器人平臺越障運動規劃[J].拖拉機與農用運輸車,2008(4):83-84.
[13] 張永江.模糊神經網絡結構優化及系統性能評估研究[D].蘭州:蘭州理工大學,2013.
[14] 李素超.基于EM機制的BP神經網絡訓練算法研究及其應用[D].西安:西安電子科技大學,2013.
[15] 彭輝.輪式移動機器人運動軌跡控制技術研究[D].廣州:廣東工業大學,2008.
[16] 李艷.移動機器人鏈軌跡生成方法的研究與仿真[D].廣州:華南理工大學,2011.
[17] 余華,吳文全,曹亮.BP神經網絡的改進算法及其應用[J].電腦知識與技術,2009(19):5256-5258.
[18] 萬億泰.BP人工智能神經網絡拓撲結構及算法[J].黑龍江科技信息,2009(28):84-85.
[19] 徐志英.一種改進的多層前饋神經網絡結構研究[J].科學技術與工程,2009(17):4973-4977.
[20] 張洪宇.基于增強學習的移動機器人運動控制研究[D].長沙:國防科學技術大學,2008.
[21] 李洲.基于模糊邏輯的溫室機器人運動控制研究[D].鄭州:河南農業大學,2009.
[22] 張燕.基于神經網絡的移動機器人軌跡跟蹤控制[D].秦皇島:燕山大學,2010.
[23] 張艷.基于RBF網絡辨識的模型參考自適應控制系統分析與仿真[D].重慶:西南交通大學,2010.
[24] 張景然,沈牧文,楊建國. 基于模擬退火遺傳算法優化BP網絡的數控機床溫度布點優化及熱誤差建模[J].機床與液壓,2014(23):1-4,50.
[25] 由嘉. 基于神經網絡技術的空中交通管制輔助決策支持系統[D].西安:西北工業大學,2005.
[26] 賀紅林,何文叢,劉文光,等.神經網絡與計算力矩復合的機器人運動軌跡跟蹤控制[J].農業機械學報,2013(5):270-275.
[27] 蘇淵,劉赟.基于BP人工神經網絡改進算法的絕緣子污穢預測[J].重慶電力高等專科學校學報,2013(3):46-49.
[28] 周燕艷.基于改進的BP算法的RoboCup防守策略研究[J].海軍工程大學學報,2011(6):40-43.
[29] 謝浩.基于BP神經網絡及其優化算法的汽車車速預測[D].重慶:重慶大學,2014.
[30] 梁捷,陳力.基于標稱計算力矩控制器的雙臂空間機器人慣性空間軌跡跟蹤的模糊自適應補償控制[J].工程力學,2010(11):221-228.
[31] 劉松國.六自由度串聯機器人運動優化與軌跡跟蹤控制研究[D].杭州:浙江大學,2009.
Keywords:agriculturalrobot;precisiontrajectoryoptimization;BPneuralnetwork;computationaltorquemethod
AutomaticControlofTrajectoryOptimizationforAgriculturalRobot—BasedonBPNeuralNetworkandComputationalTorque
YuanZhu,ShenYige
(HenanPolytechnicInstitute,Nanyang473000,China)
Inthetrajectoryoptimizationofprecisionagriculturerobot,takingautomaticcontrolasthegoal,itintroducedtheoptimizationalgorithmcombinedwithBPneuralnetworkandthecomputedtorquemethodofautomaticcontroller,whichintendedtoreducemotionerrorsduringtheworkandimprovetheworkefficiency.Inthispaper,itfirstestablishedmathematicalmodelofagriculturalrobot,kinematicsanddynamicsanalysis;then,itdesignedtheagriculturalrobotmotioncontrolsystembyusingBPneuralnetworktouncertaindynamicsfactorstojudge,andputforwardthesolutiontothefactorofadaptivelearningmethod.FinallythesystemusedMATLABsimulation.ExperimentalresultshowsthatthecombinedwithBPneuralnetworkandthecomputedtorquemethodofautomaticcontroller,whichcaneffectivelyoptimizetherobotmotionpath,andimprovetheoveralloperationefficiencyoftherobot,thesystemisstableandreliable,andtheexternalenvironmentinterferencefactorswithstrongadaptiveabilitytolearn.
2016-03-03
河南省自然科學基金項目(2015GZC155);南陽市科技攻關項目(KJGG36)
袁 鑄(1982-),男,河南南陽人,講師,碩士。
申一歌(1982-),女,河南南陽人,講師,碩士研究生,(E-mail)yuanzhu1982@hnpi.cn。
S126;TP242.6
A
1003-188X(2017)06-0033-05
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
