捆草機電氣控制系統的設計研究—基于MCGS與單片機技術
2017-12-16 07:01:53邢小琛宣傳宗馬彥華
農機化研究 2017年6期
邢小琛,武 佩,劉 宇,宣傳宗,馬彥華
(內蒙古農業大學 機電工程學院,呼和浩特 010018)
?
捆草機電氣控制系統的設計研究
—基于MCGS與單片機技術
邢小琛,武 佩,劉 宇,宣傳宗,馬彥華
(內蒙古農業大學 機電工程學院,呼和浩特 010018)
以呼倫貝爾市蒙拓農機科技股份有限公司生產的9YG-1.3型圓草捆打捆機為樣機,針對其控制部分存在自動化程度低、草捆邊緣布網太松、操作繁瑣及需人工手動計數等問題,運用昆侖通態MCGS編程軟件和Keil uVision4軟件,設計了一款以單片機系統為控制核心,以MCGS觸摸屏為人機界面,配備各種相應傳感器和控制輸出硬件的自動控制系統。該系統通過人機監控界面,實現了對捆草機運行狀況的實時監控。試驗結果表明:本控制系統有效地解決了捆草機的靈活布網問題與計數問題,并可以實時進行停車、開倉門、關倉門與報警聲亮提示,提高了捆草機的工作效率和自動化水平。
捆草機;控制系統;MCGS;布網控制
0 引言
牧草的打捆收獲不僅運輸、存儲方便,而且也有利于保持草的營養價值。隨著我國農牧業機械化水平的不斷提高,以及國家對農牧業機械購置補貼力度的加大,捆草機的需求量很大[1]。
在國外,牧草打捆機的電氣控制系統廣泛采用PLC、工業電腦及單片機等控制器作為控制核心,具有友好的人機界面。以PLC為控制核心的控制系統穩定,抗干擾能力強;工控電腦適用于高度自動化的牧場;單片機成本低,編程靈活,體積較小而且容易集成。德國克拉斯公司生產的Rollant系列圓捆機,采用視覺指示器、信號燈和電子指示器,具有草捆密度可調等特點。美國約翰迪爾公司生產的447型圓捆機,采用BaleTrakTM正面監視器和打捆張力調節系統,具有良好的操作性、安全性和打捆一致性[2]。而我國的捆草機總體的自動化程度不高,在實際使用過程中,若想實現高效捆草,必須要求捆草司機具有足夠的工作經驗[3-4]。
本文設計的自動控制系統,在有效抗干擾的同時,可以靈活控制布網,并且實時顯示整車捆草的運行狀態,以達到更加高效的捆草目的。
1 捆草機結構和工作流程
由圖1可以看出:捆草機通過傳動機構進行動力傳動。在機器工作過程中,撿拾器將地面牧草拾起,通過喂入機構進入成捆室,在旋轉滾筒的作用下首先形成草芯,隨著更多牧草的進入,草芯逐漸形成圓草捆;牧草在圓草捆外圍繼續纏繞,草捆壓力不斷增大,當壓力值達到預設值時,形成了一個完整的草捆。操作者通過壓力表判斷當草捆制作完成時,便通過控制捆繩機構對草捆開始捆繩,捆繩結束后,倉門打開,將草捆落在地面,完成一個工作循環[5-6]。
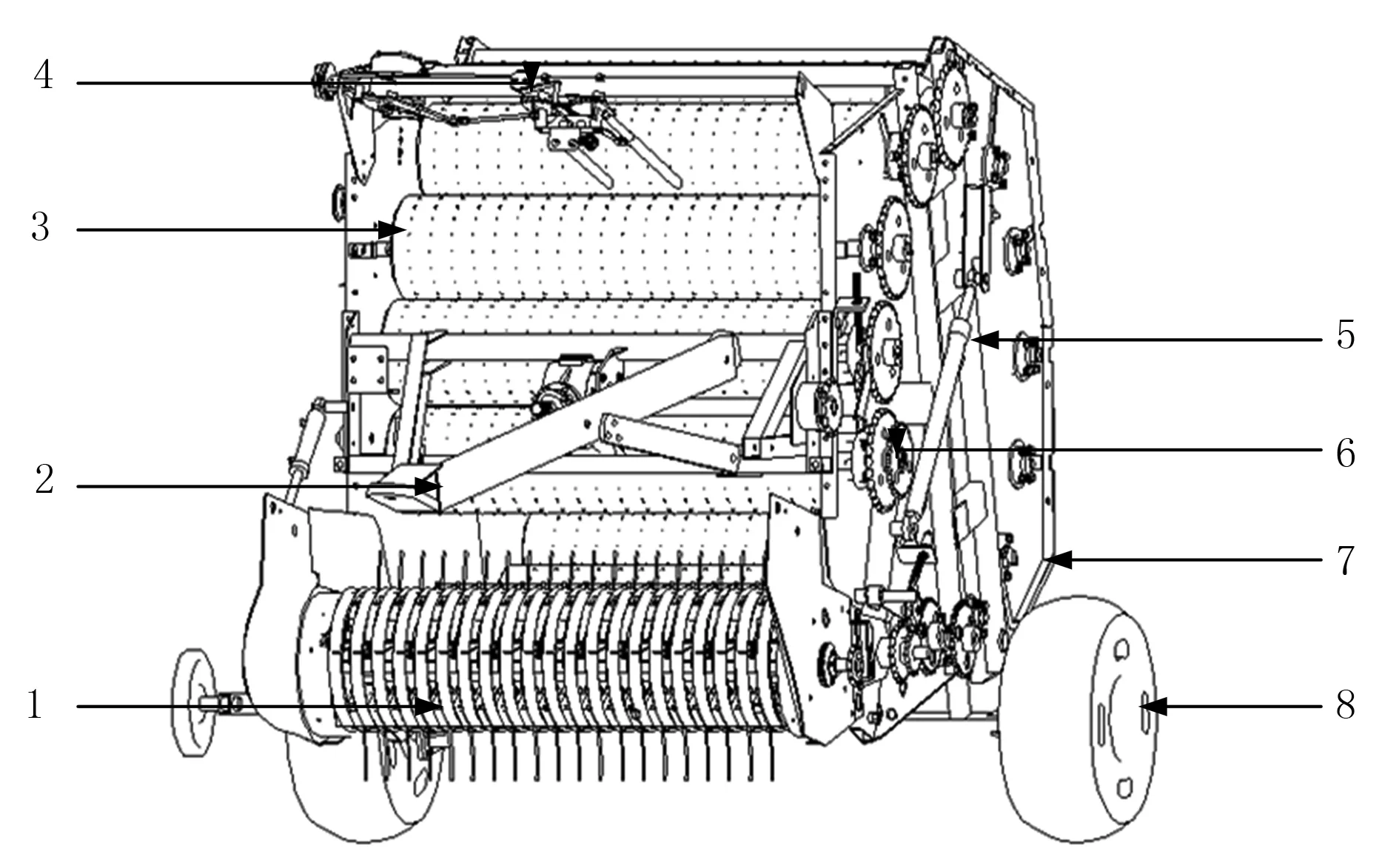
1.撿拾器總成 2.牽引架總成 3.卷壓機構總成 4捆繩機構總成 5.液壓系統 6.傳動機構 7.倉門 8.行走輪總成圖1 捆草機總體結構示意圖Fig.1 Bale overall structure diagram
2 捆草機存在的問題
本文以呼倫貝爾市蒙拓農機科技股份有限公司生產的9YG-1.3型圓草捆打捆機作為研究對象,該機在實際使用中存在以下3個問題:
1)草捆壓力是否能夠達到預設值主要由操作者觀察牽引車上的油壓表來判斷,通常油壓達到10個大氣壓時草捆的壓力才會達到預設值。然而,油壓不容易控制,過大時會導致牽引車超負荷工作,甚至被憋滅,過小時則會導致草捆質量不合格。所以,整個打草過程對操作者的要求較高。
2)在對草捆進行捆繩過程中,存在捆不緊、捆繩間距不能靈活控制及更換捆繩繁瑣的問題。這樣捆出來的草捆大都質量不合格,而且工作效率差。
3)不能高效地記錄與保存草捆的個數。
3 控制系統的設計
3.1 控制要求分析
為了解決該捆草機目前所存在的問題,擬采用單片機可編程控制器編制靈活的程序,對收集草過程、捆草過程及計數過程進行程序化自動控制。
控制系統由軟件部分和硬件部分組成。其中,硬件部分包括MCGS觸摸屏、單片機系統、中間繼電器、計數傳感器,倉門檢測傳感器、調壓器、布網檢測傳感器和手動控制開關;軟件部分主要是由MCGS嵌入式組態編程軟件和單片機編程軟件組成。
3.2 硬件設計與選型
本系統的I/O主要包括4個開關量輸入和2個開關量輸出。系統的硬件部分主要由核心處理器單元、數據采集模塊、通信模塊及輸出控制模塊組成,如圖2所示。
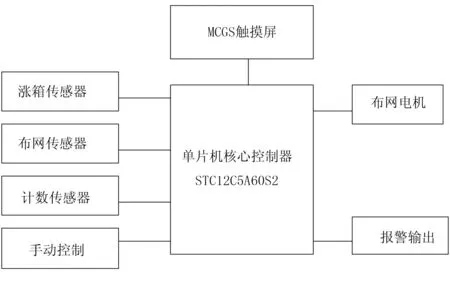
圖2 系統結構圖Fig.2 System Block Diagram
1)處理器選擇STC公司的STC12C5A60S2。該處理器帶有EEPROM功能,可掉電存儲數據,有看門狗,中斷優先級有4種狀態并且可定義,同時還擁有兩個串口。
2)通信模塊采用美信公司的MAX232芯片,是專為RS-232標準串口設計的單電源電平轉換芯片[6]。
3)輸入輸出模塊分別采用光電耦合器和繼電器。為了保證輸出控制繼電器的穩定性、抗干擾能力和可靠性,系統通過驅動芯片ULN2003來接收光耦信號驅動繼電器。
4)TPC選擇昆侖通態MCGS的觸摸屏,具體型號為TPC7062TX,是一套以Cortex-A8 CPU為核心的嵌入式觸摸屏。該產品設計采用了7英寸液晶顯示屏和電阻式觸摸屏,并預裝MCGS嵌入式組態軟件,且擁有RS-232和RS-485接口,具備圖像顯示和數據處理功能。
3.3 工作流程
捆草機啟動后,整個控制系統上電啟動,開始初始化系統,控制器和觸摸屏開始通信,讀取歷史總捆草數,開始記錄工作時間,并設定布網延時時間同時保存為默認值,完成啟動。整機開始工作,即開始捆草,等待倉門檢測傳感器的信號。當漲箱傳感器被觸發時,置于拖拉機控制室內的聲光報警提示司機停車;停車后,達到布網延時設定值后,開始布網,可手動布網,也可以自動布網;布網結束,提示打開放草捆倉門,待打開倉門以后,草捆自動滾落,觸發計數傳感器,并進行一次計數;完成計數后,提示關閉倉門,完成整個過程。
3.4 程序設計
整個控制系統運用Keil uVision4軟件進行程序設計。軟件程序系統主要包含主程序、通信程序、捆草程序、計數采樣與消抖程序和手動控制子程序。主程序根據捆草機的具體工藝流程采用順序控制方法編寫,具有自動初始化功能,并且有軟件看門狗,保證對程序的正確引導,防止程序跑飛,提高系統穩定性。主程序控制流程如圖3所示。
51單片機提供了一個全雙工標準接口,通過電平轉換芯片MA X232及外圍電路來實現信號電平信號之間的轉換,實現與觸摸屏串口硬件通信通道連接,通過編寫設備驅動程序,實現基于51單片機的設備與上位組態軟件的數據交互[7]。其接口結構如圖4所示。
在 MCGS中與進行串口通信時,相關的設備必須通過調用串行通信父設備。MCGS把包括波特率大小、數據位長度、停止位位數、有無奇偶校驗等復雜的對串口參數的設置、初始化與讀寫操作全部封裝在 MCGS系統提供的串行通訊父設備中;創建通信子設備的驅動程序時,主要是對串行端口進行操作,通過調用父設備提供的標準串口讀寫函數ComOutDat/ComInDat,即可開發編程通訊子設備驅動程序的工作。單片機接收數據采用串口中斷方式,當接收到開始符時,則從開始符的下一位開始接收數據,按照通訊協議,開始符的下一位是通道號,后面是數據位,接收到結束符時表示數據接收完畢。通道號和數據存儲在數組中,供用戶處理[7-8]。
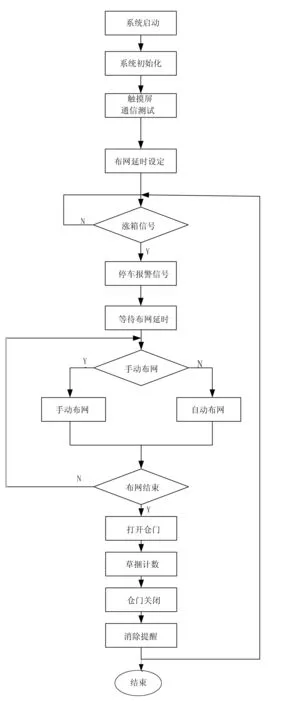
圖3 程序流程圖Fig.3 Program flow chart
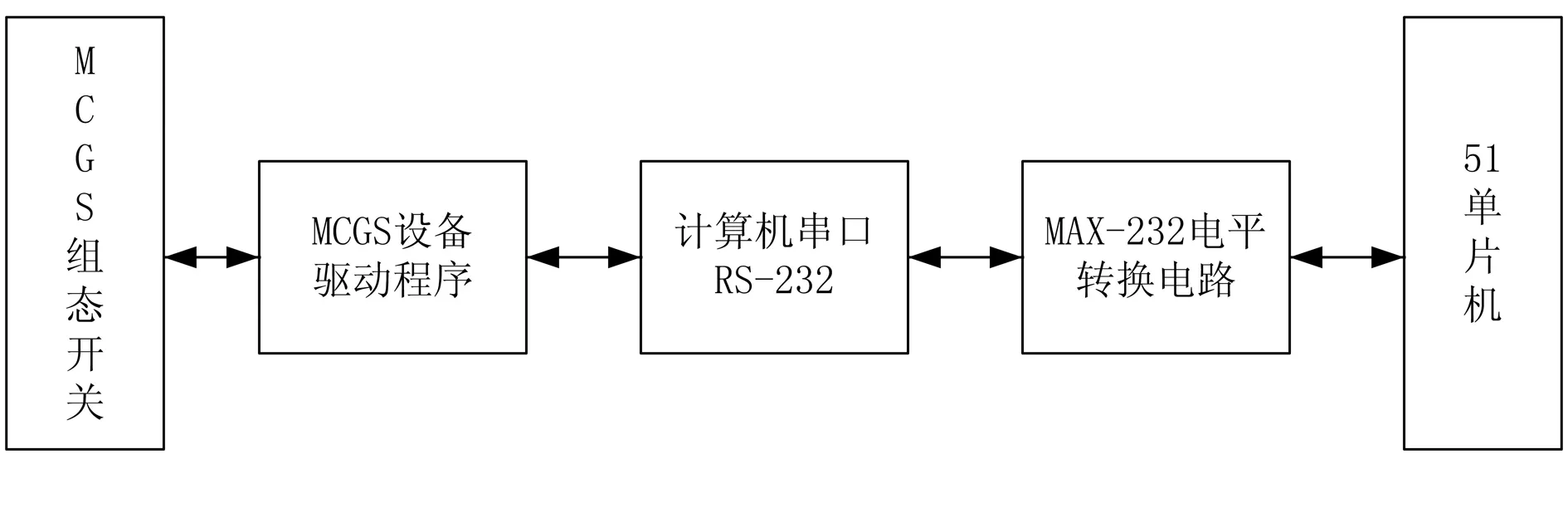
圖4 通信接口結構圖Fig.4 Communication Interface Block Diagram
3.5 人機界面MCGS組態設計
MCGS (通用監控系統) 是昆侖通態公司的用于快速構造和生成監控系統的組態軟件。它基于WindowsCE平臺的組態程序,通過對現場數據的采集與處理,通過動畫顯示、報警處理、流程控制和報表輸出等多種方式向用戶提供解決實際工程問題的方案,在自動化領域有著廣泛的應用。MCGS 嵌入式體系結構分為組態環境、模擬運行環境和運行環境3 部分。組態環境和模擬運行環境相當于一套完整的工具軟件,可以在PC 機上運行,用戶可根據實際需要裁減其中內容,可幫助用戶設計和構造自己的組態工程并進行功能測試。由MCGS 嵌入版生成的用戶應用系統,由主控窗口、設備窗口、用戶窗口、實時數據庫和運行策略5個部分構成,如圖5所示。
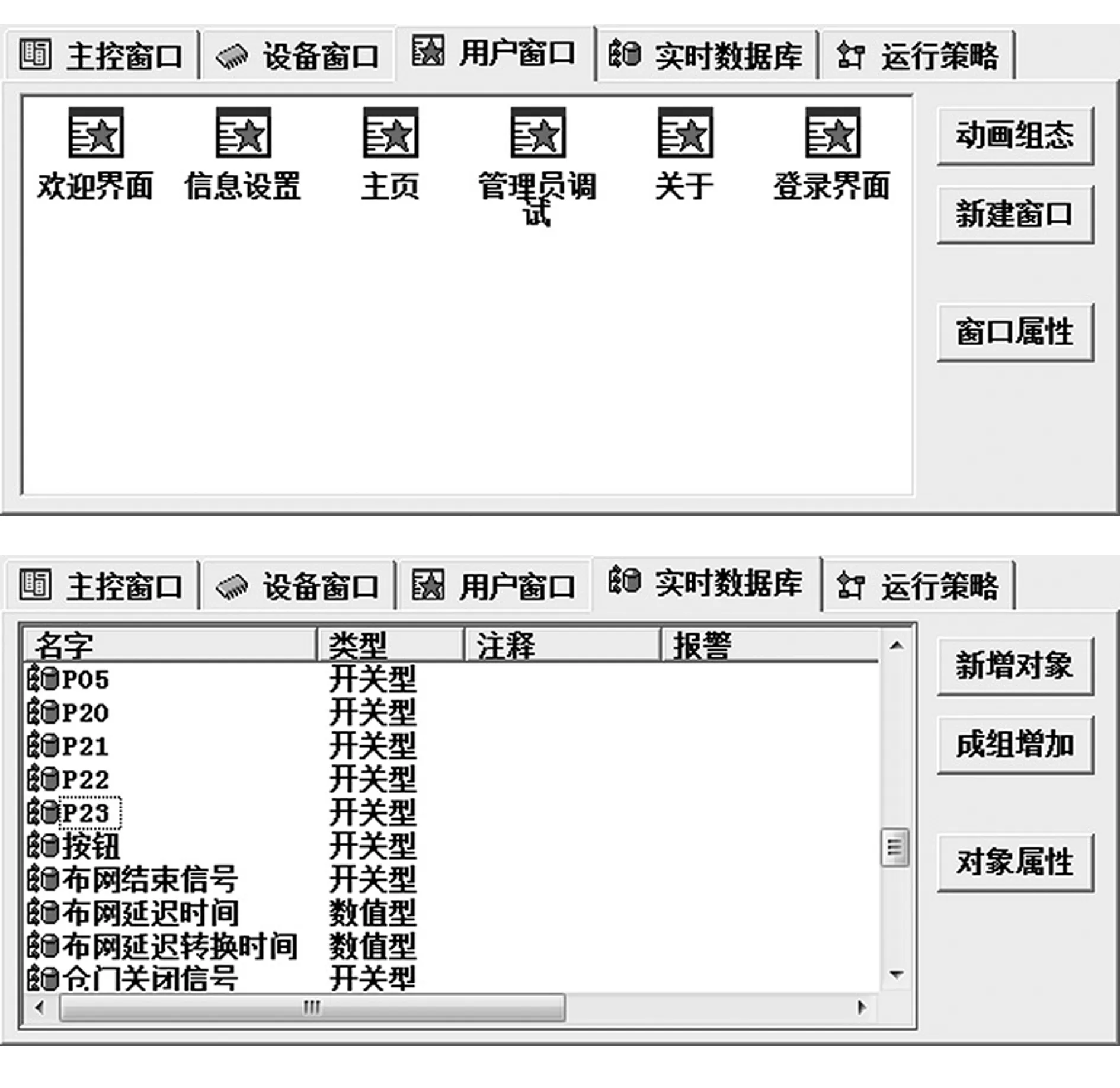
圖5 MCGS組成部分Fig.5 MCGS part
在信息界面中,可以實時顯示本次開機總共打草的草捆數及本臺機器總共的打草總草捆數,還可顯示工作時間及布網時間的設定,如圖6所示。
在動畫顯示主頁面中(見圖7),根據整機運行過程的實際情況,來顯示當前的運行情況。當正常運行到應停車時,界面顯示停車并在控制室內進行聲亮報警提示,停車后系統在等待一個布網延遲時間;若無手動布網信號,則開始自動布網,布網結束時提示打開倉門,放下草捆后計數并提示關閉倉門,系統運行結束。
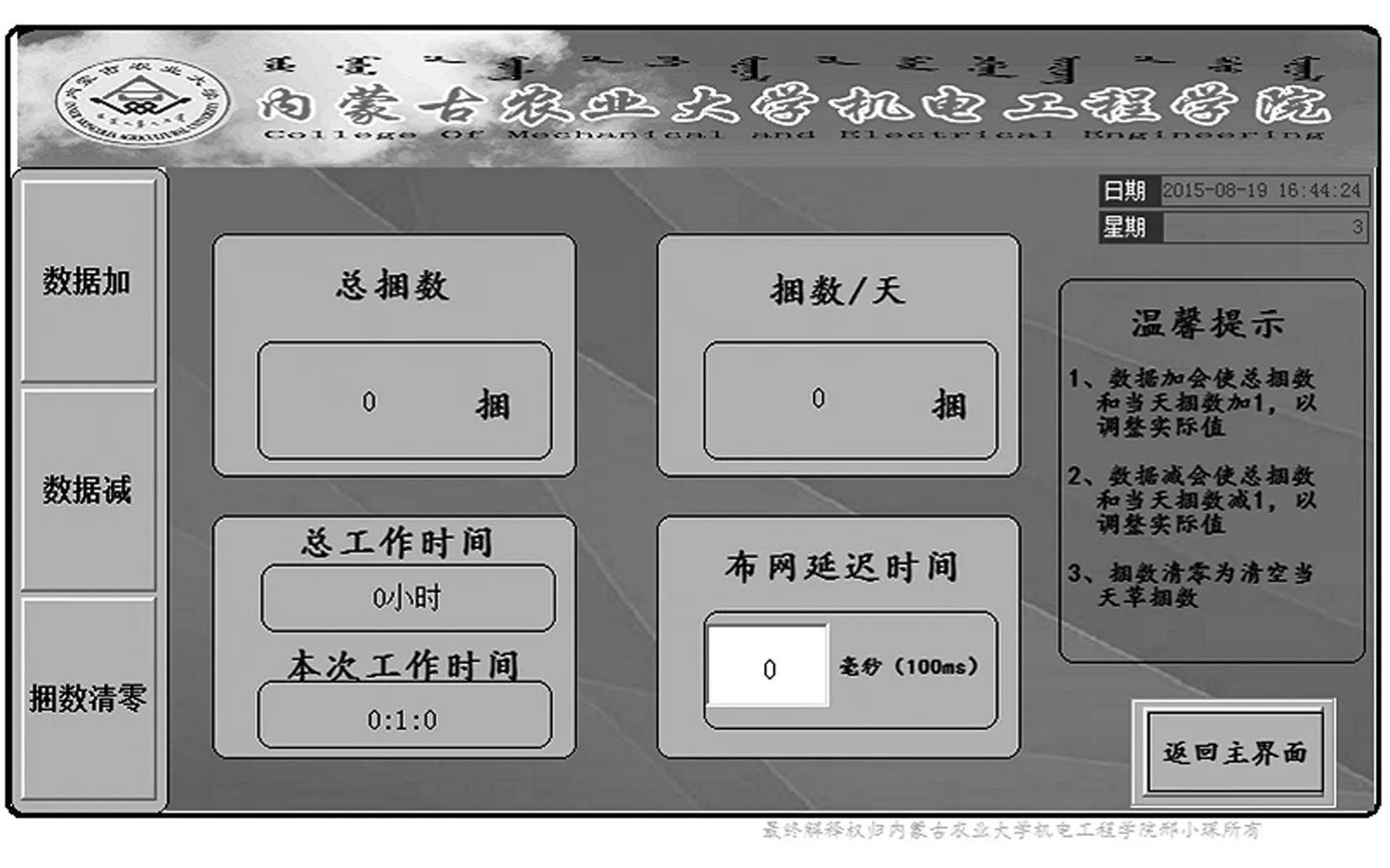
圖6 信息設置頁面Fig.6 Settings page
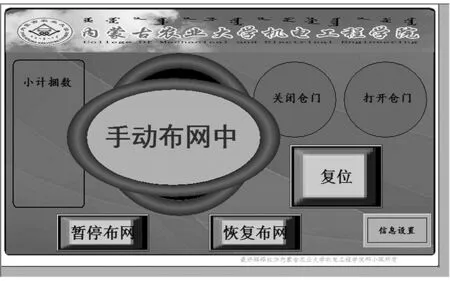
圖7 動畫顯示主頁面Fig.7 Animation Home Page
4 試驗分析
在完成整個控制系統后,對捆草機進行了模擬測試、空機測試和捆草試驗。在模擬測試試驗和空機測試中,主要測試整個工作流程指令執行的準確性、穩定性和魯棒性。在實驗室環境下,共進行20次模擬運行,然后進行了30次空機運行,整個工作順序準確率均達100%;當有外部干擾和突發狀況發生時,緊急暫停整個程序的正確率也達100%。
捆草試驗2015年9月6日在內蒙古呼倫貝爾市鄂溫克族自治旗草場進行,測試用草為當地牧草,打捆個數為10,草捆直徑為1.2m,草捆長度為1.4m,質量為300kg,草捆的完整性良好,成捆率達100%;布網形式為繞線布網,布網圈數為10,手工布網可控成功率達100%(達到設定圈數即為合格),布網完整性100%,布網尾部處理合格率達90%,計數準確率為100%,達到了設計預計要求。試驗結果如表1所示。
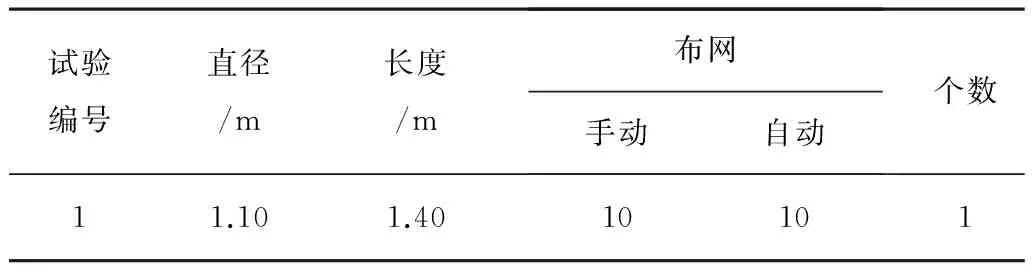
表1 打捆試驗數據
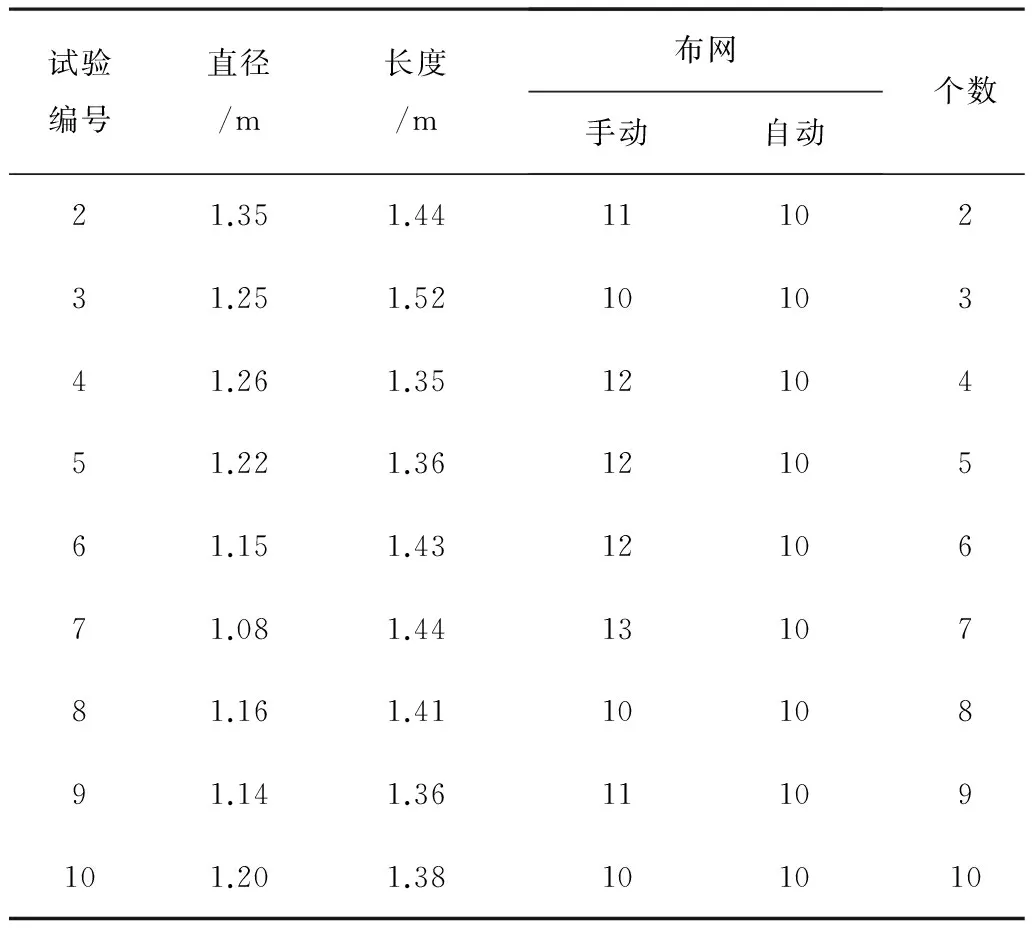
續表1
本試驗中,操作者僅需提醒停車、結束、繼續前行即可,從停車到放捆計數總共用時平均約為48s;而操作者的操作熟練程度不同,實際效率也不同,在本次試驗過程中,操作者用時平均為50s左右。
試驗過程中,整套裝置運行安全可靠、操作方便,達到了設計要求。
5 結論
經試驗驗證,本文研究的捆草機控制系統在技術上是可行的。該系統不僅解決了捆草機捆草布網不靈活的問題,還可以高效、準確地記錄與保存草捆的個數,在提高了捆草機工作效率的同時也減輕了捆草司機的工作量。總的來說,本套系統具有使用方便、操作快捷、故障率低及運行穩定等特點,達到了預期的設計目的。
[1] 劉振營.呼倫貝爾農機人實現夢想的地方[J].農業機械,2011(9):34-44.
[2] 肖章,劉亮東,王光輝,等.基于PLC的青貯圓草捆打捆機控制系統設計[J].中國農業大學學報, 2013, 18(6): 175-179.
[3] 操子夫,趙婉寧,楊雨林,等.園捆打捆機研究現狀與發展趨勢[J].農業與技術,2014,34(11):38,69.
[4] 華榮江,唐遵峰,葉紅艷,等.國內外圓捆機械研究與發展趨勢[J].中國農機化,2012(3):23-26.
[5] 王春光,敖恩查,邢冀輝,等.鋼輥外卷式圓捆打捆機設計與試驗[J].農業機械學報,2010,41(S1):103-106.
[6] 王春光.鋼輥外卷式圓捆機結構與原理[J].農業機械,2008(34):43-45.[7] 王曉光.基于MCGS的51系列單片機通用驅動程序設計[J].儀表技術與傳感, 2010(5):38-40.
[8] 潘崢嶸, 張巖, 郭凱.基于 MC G S 的 C 8051F 020單片機驅動程序的設計與應用[J].微計算機應用, 2009, 30(2):48-52.
Abstract: In this paper, an automatic control system was developed for the silage round baler 9YG-1.3 manufactured by the Mengtuo Agricutural-Machinery Technology Co. Ltd, for solving the problems of the low-degree automation, too-loose edge of bale, too complicated operation and manual counting bales. The system was designed by using the MCGS as well as the Keil uVision4 software programs, using the SCM system as the core, the touch screen as the human-computer interface, and various sensors and corresponding control output hardware. Through the man-machine monitoring interface, the system realized the real-time monitoring of the running status of the silage round baler. The tested results show that the control system has effectively solved the existed problems for the questioned silage round baler , realized the baling door open or close and light alarming in real time , and raised the working efficiency.
ID:1003-188X(2017)06-0219-EA
Design and Study on Electric Control System of Baler—Based on MCGS & Microcontroller Technology
Xing Xiaochen, Wu Pei, Liu Yu, Xuan Chuanzong, Ma Yanhua
(College of Mechanical and Electrical Engineering, Inner Mongolia Agricultural University, Hohhot 010018, China)
silage round baler; control system; MCGS; net control
2016-05-10
國家自然科學基金項目(51165029);內蒙古“草原英才”產業創新人才團隊項目(內組通字[2014]27號)
邢小琛(1991-),男,內蒙古包頭土默特右旗人,碩士研究生,(E-mail)xc2444@163.com。
武 佩(1963-),男,內蒙古化德人,教授,博士生導師,博士,(E-mail)jdwp@imau.edu.cn。
S817.11+5
A
1003-188X(2017)06-0219-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
