UUV自航發射方法探究
2017-12-28 07:59:33楊文,馬亮
艦船科學技術 2017年12期
楊 文,馬 亮
(海軍潛艇學院,山東青島 266199)
UUV自航發射方法探究
楊 文,馬 亮
(海軍潛艇學院,山東青島 266199)
針對通過魚雷發射管自航發射UUV,分析UUV自航出管的前提條件以及自航出管是否可行。UUV自航出管的可行性與其重力浮力差、最低出管速度及出管時的潛艇航速相關,探究典型口徑魚雷發射管適合自航發射的UUV。對無人水下航行器內彈道建模,分析自航發射時不同的補水方式對自航發射UUV的影響,從理論上對UUV自航出管的可行性進行論證。
自航發射;魚雷發射管;補水
0 引 言
UUV是一類無人控制、自帶能源、自主導航與控制、自動力推進和自主作業的水下機器人,可廣泛應用于偵察監視、情報搜索、跟蹤、預警、通信中繼、水下攻擊等各方面。UUV作為高新技術水下無人作戰平臺,在情報監視與偵查、反水雷、水下救援等領域發揮了重要作用,其中潛艇和水面船只布放和回收UUV是使用UUV的重要環節。潛艇回收UUV不易受外界環境影響,可以隱蔽的對軍用UUV進行回收[1-3]。利用潛艇上裝備的魚雷發射管布放UUV,可以減少對潛艇的改造,不增加額外布放UUV的裝置,是最佳的選擇布放UUV方式之一。自航發射UUV有低噪聲的顯著優勢,可以使UUV利用螺旋槳產生的推力自航,降低布放的發射噪聲,提高UUV的隱蔽性[4]。
1 UUV 自航出管的前提條件分析
UUV自航發射具有噪聲低的優點,因為其依靠自身動力游出發射管,不會產生排氣噪聲。自航發射管中有時具有輔助裝置,如意大利的B512型發射管裝有輔助裝置,當魚雷自航發射過程中出現問題,無法自航發射時,可以將其拋射出去,以免對潛艇及艇員生命安全造成威脅[5]。
實現自航發射一方面要保證UUV在發射管內有良好的啟動特性,在發射過程中不會對發射裝置、潛艇及UUV自身造成影響,另一方面要保證補水充足,不造成“空穴”,使UUV出管時能達到最低的航速要求。
自航發射時,UUV在發射管中的布局如圖1所示,在管內啟動UUV的動力裝置,UUV靠螺旋槳的推力出管。UUV自航出管時螺旋槳的工作效率取決于補水的充足與否以及補水的方式,因此魚雷發射管應具有較大的口徑,才能保證充足的海水進入發射管后端,對管內進行有效補水,這是實現UUV自航所具備的前提條件。為保證艇外的海水能及時充足的進入魚雷發射管,要求發射管的內徑要比UUV的內徑大。
如表1所示,美國的NMRS和LMRS型UUV直徑為533 mm口徑,在570 mm的魚雷發射管上不適合533mm口徑UUV自航發射,參考文獻[6]中對潛載無人水下航行器自航內彈道進行建模和仿真。當直徑為533mm的UUV裝入魚雷發射管后,與發射管之間只有很小的縫隙。當魚雷發射管裝入直徑為533 mm的魚雷時,會留出很小的間隙保證發射時魚雷不被卡死,從而使魚雷順利出管。同理,如果在570mm口徑的魚雷發射管進行直徑533mm UUV自航發射,其縫隙很小,不能形成有效的補水通道,阻力太大,無法進行自航發射。偶爾有操雷在發射管中啟動后能游出發射管,因為操雷和戰雷不同,一般其具有正浮力,意外啟動后,通過發射管與魚雷之間間隙不能進行有效補水,這種情況下魚雷出管速度很慢。目前國內外的一些軍用UUV具有微弱的正浮力,其浮力大小主要根據排水量設定,而UUV出管要保證一定航速的情況下,還需要選用大口徑魚雷發射管,才能保證發射過程中補水充足。文獻[6]中利用 400mm,450mm,500mm,550mm口徑的無人水下航行器,在直徑為570mm的魚雷發射管進行等截面魚雷發射管自航布放過程中的阻力總和仿真分析,仿真結果表明當航行器口徑大于500mm以后,航行器的出管阻力明顯增加,不適合采用自航方式進行布放。結果表明,可以在現役潛艇的魚雷發射管自航布放口徑為500mm的UUV。
目前裝備應用的自航式魚雷發射管有2種,一種是以美國、日本為代表,采用等截面533mm標準口徑發射管,發射直徑482mm的小型魚雷;一種是以德國、意大利為代表,采用專門的大口徑、變截面發射管,發射標準的533mm的魚雷。后者代表了當今自航式發射管的較高水平和發展趨勢。自航發射裝置普遍采用大口徑發射管前端補水方式以達到相應的出管速度,因此自航發射無人水下航行器首先要考慮前端補水的可能性。以ΓC-45型氣動不平衡式發射裝置為例,其發射管內徑為570mm,氣密環和導軌鏜孔內徑為536+0.5mm,若自航發射直徑為533mm的無人水下航行器,僅僅靠前端補水自航發射,由于氣密環作用,發射管與UUV之間的間隙不到1 cm,顯然不能形成有效的補水通道。
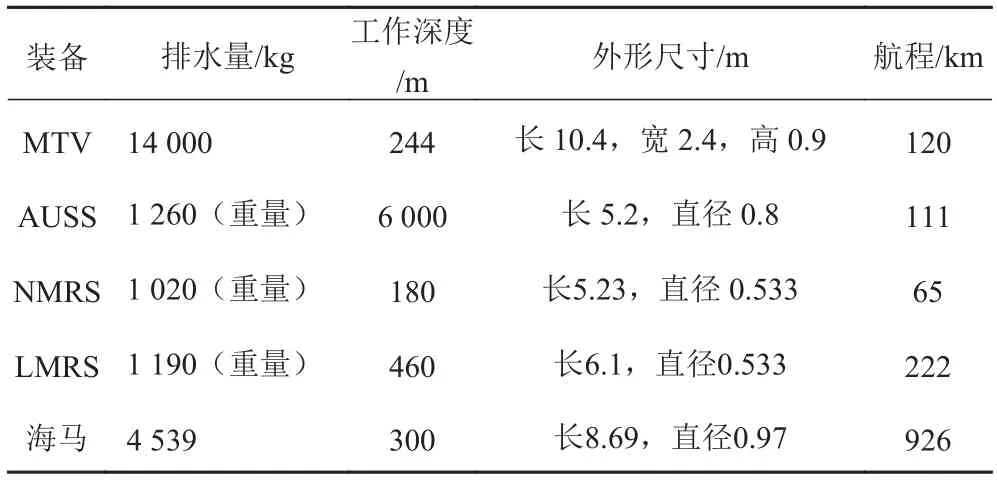
表1 美國典型軍用UUV主要戰術技術性能指標Tab.1 Performance index ofmain tacticsand technique for America representative UUV
2 UUV 自航出管內彈道模型
參考魚雷自航的研究方法[7,8],為簡化計算,做出如下假設:1)采用定常假設求解UUV阻力、流體阻力;2)附加質量與理想流體中的運動時間取值相同;3)忽略行波阻力;4)假定無人水下航行器從開始運動起就處于紊流的流場中;5)UUV在發射管的導軌上運動,忽略其重力、浮力和流體動力對航行器姿態的影響;6)忽略UUV與導軌間的摩擦阻力。
文獻[5]中干式自航發射裝置內彈道建模與仿真,無人水下航行器在等截面魚雷發射管進行受力分析,受力主要有主推進螺旋槳的推力、摩擦阻力和流體阻力,根據受力情況建立的無人水下航行器魚雷管內運動方程為
式中:mu為UUV質量,kg;λi為UUV軸上附連水的質量,kg;vu為無人水下航行器速度,m/s;Ft為主推進螺旋槳推力的瞬時值,N;Ra為補水壓差引起的阻力瞬時值,N;Rb為UUV運動時產生的運動阻力瞬時值,N;Rf為由魚雷發射管內流體沿程損失引起的附加阻力瞬時值,N;Fm為魚雷發射管內流體局部引起的附加阻力瞬時值,N。
3 UUV 自航出管方法探究
對于自航發射來說,螺旋槳產生的推力大小主要取決于補水的效果,因此在魚雷發射管中進行無人水下航行器的自航發射研究必須有效解決補水通道問題。
3.1 采用前端補水的自航發射方式
國外資料對采用前端補水發射時的發射管內徑的論述為“自航發射魚雷發射管的內徑一定要使水(發射時,水補進發射管,使魚雷螺旋槳在其中運轉)從發射管前端經過魚雷周圍(環形間隙)流進管里來[10]”,同理自航發射UUV時,能否形成有效的補水通道是實現自航發射的前提。
3.2 采用后端自流補水的自航發射方式
既然單靠前端補水自航發射不能形成有效的補水通道,僅僅采用前端補水不可能實現自航發射[11]。設想在發射管中啟動動力系統,帶動推進器工作,魚雷前移導致的發射管內增大的空間通過水道進來的海水補充,從而實現補水。該文獻實驗結果表明采用后端自流補水自航發射魚雷出管速度較低,而UUV自航出管的航速要求較低[12],文獻中實驗結果表明UUV在航行出發射管時,其航速大于最低的出管速度,滿足自航出管條件。或設計一種對UUV轉速約束裝置,使螺旋槳達到額定轉速時解除制動,能增加UUV的出管速度,實現自航發射。
如圖2所示,在UUV自航發射的初始階段,螺旋槳位于進水口的后端,此時螺旋槳泵水的方向與其補水的方向一致,UUV加速向前運動。當UUV向前運動越過進水口時,如圖3所示,此時的補水方向與螺旋槳泵水方向相反,推進器的工作會降低魚雷的運動速度。
3.3 采用有動力后端補水的自航發射方式
采用后端自流補水的自航發射UUV的出管速度偏低且管內運動的時間較長,設想利用液壓平衡式發射管后端進水通道實現有動力補水,通過高壓氣瓶推動氣缸活塞進而拉動水缸活塞,推動海水進入發射管后端。與后端自流補水的自航發射方式類似,采用有動力后端補水的自航發射方式,無人水下航行器在管中啟動動力系統對其發射無益處,決定UUV出管速度的是海水進入發射管的流動速度,而推進器“泵水”方向與補水方向相反,從而增大后端補水的阻力,降低UUV出管速度。管內啟動動力系統還可能使發射管的銹蝕部分導軌產生變形,可能導致UUV無法正常發射,影響任務的進行。無人水下航行器在管內啟動會增大發射噪聲,因為推進器啟動增加了后端補水阻力,為保證出管速度則需要增加發射能量克服這部分阻力;無人水下航行器啟動還會疊加噪聲源,不利于保持潛艇的隱蔽性,反而增大了發射噪聲,違背了自航發射的初衷。
4 結 語
UUV在未來的反潛水下信息戰中將發揮重要的作用,加速研究和發展UUV將對建設我國海軍至關重要[13]。本文通過對無人水下航行器出管條件分析、內彈道模型建立,分析自航發射無人水下航行器的方法,前端補水和后端自流補水及采用有動力后端補水的自航發射方式都需要解決補水的問題,而采用有動力后端補水自航發射并不適用。大口徑發射管是實現自航發射的必備條件,或者在533mm口徑的魚雷發射管自航發射口徑小于500mm的魚雷,才能保證補水充足,發射時保證UUV能安全出管。
[1]蔣榮華.潛載UUV的作戰使用分析[J].艦船電子工程,2015,35(10):17–20.JIANG Rong-hua.Application analysisof submarine UUV[J].Ship Elcetronic Engineering,2015,35(10):17–20.
[2]曹和云,倪先勝,何利勇,等.國外潛載 UUV 布放和回收技術[J].中國造船,2014,55(2):200–208.CAO He-yun,NIXian-sheng,HE Li-yong,etal.Review on UUV launch and recovery techno-logy from submarine[J].Shipbuilding of Chian,2014,55(2):200–208.
[3]周杰,周文林.潛用 UUV 回收技術[J].四川兵工學報,2011,32(8):45–47.ZHOU Jie,ZHOUWen-lin.Research on recovery technology unmanned underwater vehicle used in submarine[J].Sichuan Ordnance Journal,2011,32(8):45–47.
[4]張振山,程廣濤,梁偉閣,等.潛艇自航發射魚雷的若干問題[J].海軍工程大學學報,2012,24(4):58–62.ZHANG Zhen-shan,CHENG Guang-tao,LIANGWei-ge,et al.Some problems about self-propelled torpedo launching in submarine[J].Journal of Naval University of Engineering,2012,24(4):58–62.
[5]練永慶,王樹宗.魚雷發射裝置設計原理[M].北京:國防工業出版社,2012.
[6]許智生,郭彬,鄭立捷,等.潛載無人水下航行器自航布放內彈道模型與仿真[J].中國艦船研究,2015,9(1):111–115.XU Zhi-sheng,GUO Bing,ZHENG Li-jie,etal.Modeling and simulation of the interior trajectory for unmanned underwater vehicles during swim-out lunching[J].Chinese Journal of Ship Research,2015,9(1):111-115.
[7]劉海明,張振山,程廣濤.漸擴型自航發射魚雷內彈道模型與仿真[J].魚雷技術,2011.19(2):144–147.LIU Hai-m ing,ZHANG Zhen-shan,CHENG Guang-tao.Modeling and simulation of interior trajectory for torpedo expansionary swim-out launching.[J]Torpedo Technology,2011.19(2):144–147.
[8]徐勤超,練永慶,王樹宗.自航魚雷發射裝置管體結構參數對內彈道的影響[J].彈箭與制導學報,2011,31(4):128–132.XUQin-chao,LIAN Yong-qing,WANG Shu-zong.The effect of structural parameter of swim-out torpedo launcher on Interior trajectory[J].Journal of Projectiles,Rockers,Missiles and Guidance,2011,31(4):128–132.
[9]歐陽輝旦,程廣濤,張振山,等.自航發射魚雷內彈道模型與仿真[J].魚雷技術,2009,17(1):48–51.OUYANG Hui-dan,CHENG Guang-tao,ZHANG Zhen-shan,etal.Modeling and simulation of interior trajectory for torpedo swim-out launching[J].Torpedo Technology,2009,17(1):48–51.
[10]Torpedo Launching noise[DB/OL].http://www.geocities.comCapecanaveral46audiol.htm l.2010-02-01.
[11]秦楠,馬亮,秦庚申.液壓平衡式發射裝置自航發射內彈道模型與仿真[J].火力與指揮控制,2014,39(9):87–90.Q IN Nan,MA Liang,Q IN Geng-shen.Modeling and simulation of trajectory for torpedo swim-out launching of submarine hydraulic and balanceable launching equipment[J].FireControl&Command Control,2014,39(9):87–90.
[12]李國良,郭燕子,郭彬,等.無人水下航行器自航出管可行性淺析[J].中國艦船研究,2013,8(6):45–49.LIGuo-liang,GUO Yan-zi,GUO Bin,et al.Feasibility analysis of UUV swim-out launching[J].Chinese Journal of Ship Research,2013,8(6):45–49.
[13]華鐘祥.無人水下航行器與操雷[J].艦船科學技術,2004,26(6):64–66.HUA Zhong-xiang.UUV and torped[J].Ship Science and Technology,2004,26(6):64–66.
Research on technology of self-prorelled launching UUV
YANGWen,MA Liang
(Naval Submarine Academy,Qingdao 266199,China)
The paper isaboutself-proprelled launching unmanned underwater vehicles(UUV)by torpedo launch tube,analyze the prerequisite of swim-out launching.Launching process is affected by buoyancy,weight,and the velocity of submarine and UUV,explore what kind of UUV that is suitable for typical torpedo tube self-prorelled launching,build the interior trajectory model,analyze the influence of different water supplement to self-prorelled launching,prove the theoretical feasibility of swim-out launching.
swim-out launching;torpedo tube;water replenishing
TP391.4
A
1672–7649(2017)12–0114–04
10.3404/j.issn.1672–7649.2017.12.024
2017–07–03;
2017–07–27
楊文(1992–),男,碩士研究生,研究方向為兵器發射理論與技術。