基于實時仿真平臺的大功率柴油機控制策略開發(fā)與驗證
2018-01-04 03:39:32褚全紅劉濤胡勇李菲菲姚素娟楊國華仇會彬任路郭敏
車用發(fā)動機 2017年6期
褚全紅,劉濤,胡勇,李菲菲,姚素娟,楊國華,仇會彬,任路,郭敏
(1.中國北方發(fā)動機研究所(天津),天津 300400;2.北京經(jīng)緯恒潤科技有限公司,北京 100191;3.北方通用動力集團有限公司,山西 大同 037036)
基于實時仿真平臺的大功率柴油機控制策略開發(fā)與驗證
褚全紅1,劉濤1,胡勇1,李菲菲1,姚素娟1,楊國華1,仇會彬2,任路1,郭敏3
(1.中國北方發(fā)動機研究所(天津),天津 300400;2.北京經(jīng)緯恒潤科技有限公司,北京 100191;3.北方通用動力集團有限公司,山西 大同 037036)
針對大功率共軌柴油機的控制,設(shè)計了相應(yīng)的EMS控制策略,包括柴油機的工況判斷與切換、噴油控制、油軌壓力控制。基于實時仿真平臺,通過實時仿真對EMS控制策略進行了調(diào)整與優(yōu)化,對EMS的軌壓控制、噴油控制等策略進行了驗證,證明了控制策略設(shè)計合理、功能正常,可以用于實際大功率柴油機的控制試驗。
柴油機;控制策略;實時仿真
高壓共軌系統(tǒng)能夠?qū)崿F(xiàn)對噴油壓力、噴油量、噴油定時以及噴油規(guī)律的全工況靈活柔性控制,對大功率柴油機技術(shù)的發(fā)展起到了重要的作用。其對大功率柴油機性能的改善,除了依靠機械性能和EMS硬件電路性能的保證外,主要依賴于EMS的控制策略和控制算法。而隨著排放法規(guī)的日益嚴(yán)格和電控技術(shù)的不斷進步,柴油控制系統(tǒng)復(fù)雜程度大幅增長,開發(fā)周期不斷縮短,在策略及算法的開發(fā)過程中,需要考慮的因素不斷增多,策略的準(zhǔn)確性也需要及時進行檢驗,因此使用實時仿真平臺對控制策略與算法進行驗證成為開發(fā)過程中的重要環(huán)節(jié)[1-6]。
1 實時仿真平臺
發(fā)動機的控制是一種要求有很強實時性的技術(shù),非實時的、離線的仿真研究只能驗證模型的準(zhǔn)確和控制策略是否可行,其實際的指導(dǎo)意義與開發(fā)工具具有的價值,只有在實現(xiàn)以實際時間為衡量標(biāo)準(zhǔn)以及將部分實際硬件集成于其中進行實時的仿真時才能得到比較完全的體現(xiàn)[7-13]。
硬件部分包括實時處理器、IO模塊以及其他外圍硬件,用于模型的實時運行與信號的準(zhǔn)確模擬與采集,構(gòu)成EMS運行及相關(guān)測試所需的完整電氣環(huán)境。高性能的處理器為模型提供了高精度與強實時性的仿真計算環(huán)境,從而可以滿足準(zhǔn)確模擬被仿真對象的各種特性的需要。對于EMS所需的各種信號,各類IO板卡可以準(zhǔn)確地模擬傳感器信號,采集執(zhí)行器驅(qū)動信號,如曲軸、凸輪軸信號的模擬與噴油點火信號的采集。其他外圍硬件功能包括故障注入、負(fù)載仿真、電源模擬與管理等,硬件平臺功能得以完善從而形成完整的EMS集成測試系統(tǒng)。本系統(tǒng)平臺結(jié)構(gòu)方案見圖1。
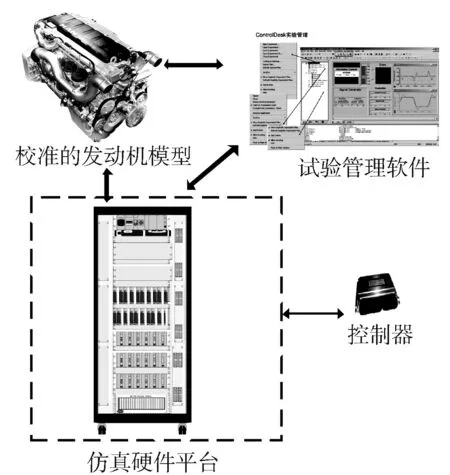
圖1 實時仿真平臺結(jié)構(gòu)
對于半實物仿真系統(tǒng),實時仿真模型具有重要的作用,模型用于在線仿真模擬發(fā)動機特性,對EMS的控制信號作出瞬態(tài)響應(yīng),因此,仿真模型需要具有實時性與準(zhǔn)確性。模型包含燃油系統(tǒng)、氣缸系統(tǒng)、氣路、發(fā)動機冷卻系統(tǒng)、排氣系統(tǒng)。該模型主要采用平均扭矩模型,基于準(zhǔn)穩(wěn)態(tài)模型與充-排法模型,由微分方程與代數(shù)方程組成,主要體現(xiàn)不同周期內(nèi)平均值的變化,不對具體的工作過程進行細(xì)致描述;為模擬氣缸模型在不同工作沖程下對曲軸轉(zhuǎn)角的影響,模型采用了基于曲軸轉(zhuǎn)角的函數(shù)并使之與發(fā)動機輸出扭矩相關(guān),可以對發(fā)動機各缸不均勻性等現(xiàn)象進行模擬[8-15]。
2 總體控制策略
共軌柴油機的主要控制功能是實現(xiàn)油軌壓力、噴油量、噴油正時及規(guī)律的全工況靈活控制。因此,在控制策略上,通過特定的控制模塊實現(xiàn)特定的功能。設(shè)計原理見圖2。
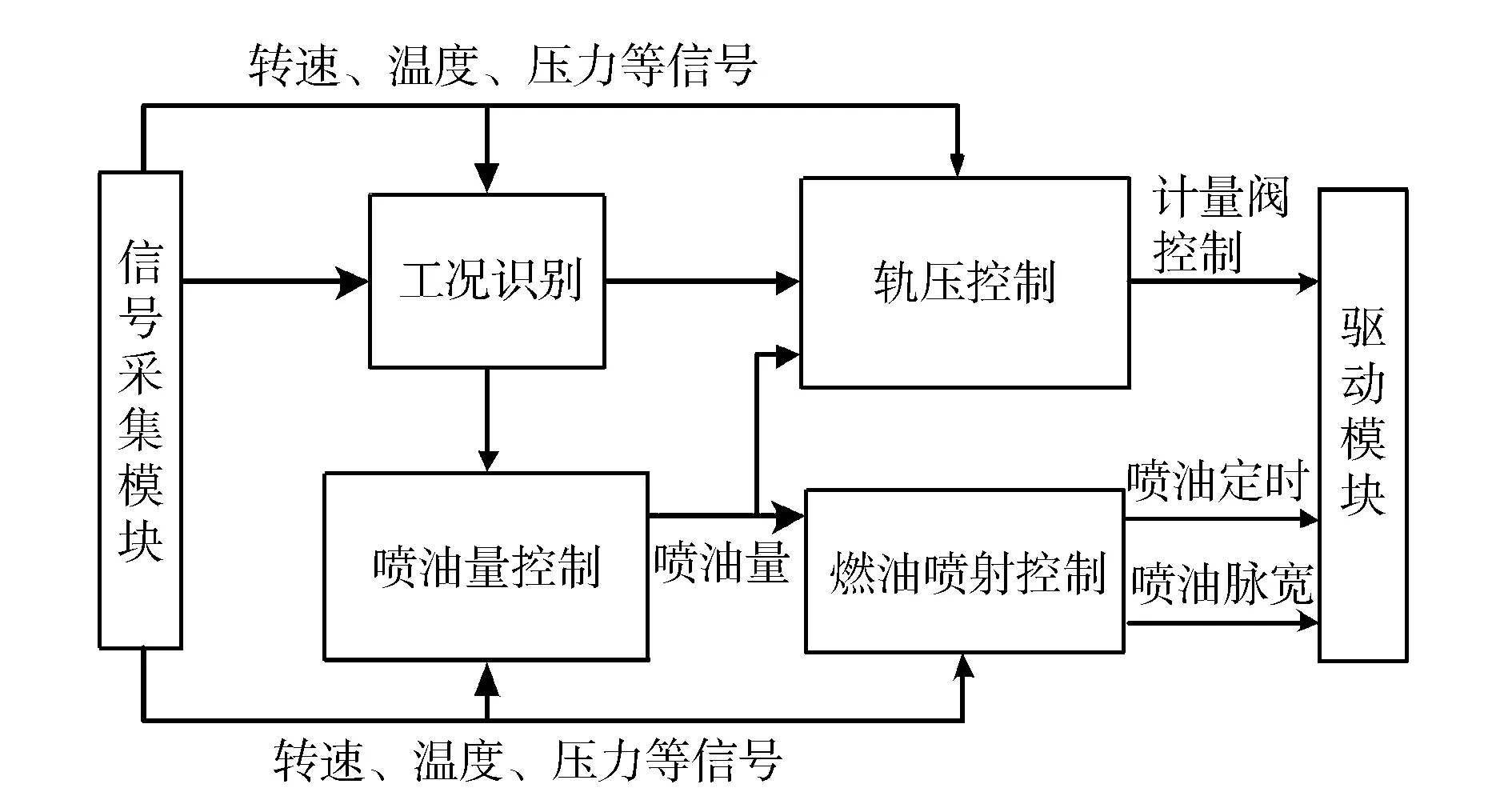
圖2 控制器控制策略
柴油機在起動、加速和運轉(zhuǎn)的過程中,工作狀態(tài)時刻都在變化,因此,必須頻繁檢查柴油機的工作狀態(tài),按照設(shè)定的邏輯進行調(diào)整,實現(xiàn)有效地控制,并通過細(xì)化工況而優(yōu)化控制過程。對于當(dāng)前工況的確定,采用檢查當(dāng)前工況描述條件及工況轉(zhuǎn)移限制的方式,工況轉(zhuǎn)移限制即某工況只能轉(zhuǎn)移至另一個或幾個工況。控制器工況識別原理見圖3。

圖3 控制器工況識別
2.1 軌壓控制
對于傳統(tǒng)的PID軌壓控制算法,隨著發(fā)動機工況變化,最佳的PID控制器參數(shù)會不斷地發(fā)生變化,這就導(dǎo)致了在一些工況中,PID控制器的參數(shù)不是最佳參數(shù),控制效果因而變差。PID控制器的另一個問題是,參數(shù)一經(jīng)確定很難實現(xiàn)在線修改,影響了軌壓控制動靜態(tài)性能的進一步提高。為提高控制效果,采用神經(jīng)網(wǎng)絡(luò)復(fù)合PID的算法。小腦模型關(guān)聯(lián)控制器(Cerebellum Model Articulation Controller,CMAC)神經(jīng)網(wǎng)絡(luò)是一種前饋網(wǎng)絡(luò),采用有導(dǎo)師的學(xué)習(xí)算法,是局部逼近型的神經(jīng)網(wǎng)絡(luò),由于其具有在線學(xué)習(xí)能力且學(xué)習(xí)速度快,可以實現(xiàn)實時控制[16-17]。因此本研究設(shè)計了CMAC復(fù)合PID控制器用于軌壓控制(見圖4)。
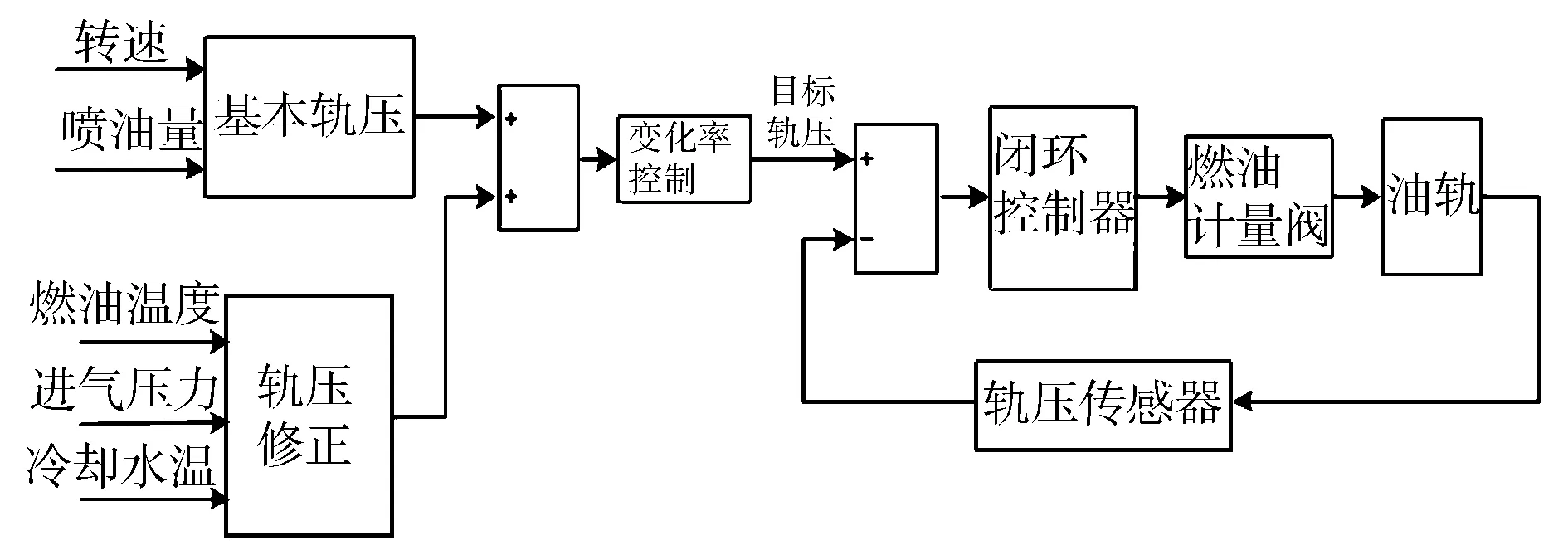
圖4 軌壓控制結(jié)構(gòu)
CMAC神經(jīng)網(wǎng)絡(luò)具有很多優(yōu)點,比一般的神經(jīng)網(wǎng)絡(luò)更適用于非線性系統(tǒng)的實時控制。CMAC控制復(fù)合PID控制結(jié)構(gòu)見圖5。這一控制系統(tǒng)系統(tǒng)通過CMAC和PID的復(fù)合來達到前饋反饋控制,其特點如下:
1) CMAC用于前饋控制,可以比較精確地形成被控對象的動態(tài)逆模型,能夠提高系統(tǒng)的控制響應(yīng)速度,并且減小超調(diào)量,強化控制精度;
2) PID控制器用于反饋控制,以保持系統(tǒng)的穩(wěn)定,同時可以抑制擾動。

圖5 CMAC與PID復(fù)合控制結(jié)構(gòu)
CMAC的算法為有導(dǎo)師的學(xué)習(xí)算法,每個控制周期結(jié)束后,計算相應(yīng)的CMAC輸出un(k),并與總的控制量u(k)進行比較,進入學(xué)習(xí)過程權(quán)值修正,修正權(quán)值所用的算法為神經(jīng)網(wǎng)絡(luò)常用的δ學(xué)習(xí)規(guī)則。網(wǎng)絡(luò)的優(yōu)化以總控制輸出量與CMAC網(wǎng)絡(luò)輸出之差最小為目的。經(jīng)過CMAC的學(xué)習(xí),逐漸使系統(tǒng)的總控制輸出量全部由CMAC產(chǎn)生。當(dāng)常規(guī)控制器不用PID控制算法而采用PD算法時,可以使CMAC的權(quán)值修正僅基于當(dāng)時的誤差值與其變化值。該系統(tǒng)的控制算法為
(1)
u(k)=un(k)+up(k)。
(2)
式中:ai為選擇向量;c為泛化參數(shù);un(k)為CMAC的輸出值;up(k)為傳統(tǒng)PID控制器的輸出值。
CMAC概念映射實現(xiàn)的方法:輸入空間S在區(qū)間[Smin,Smax]上被分成N+2c個量化間隔,即
v1×v2×…×vc=Smin,
(3)
vj=vj-1+Δvj,(j=c+1,…c+N),
(4)
vN+c+1×vN+c+2×…×vn+2c=Smax。
(5)
CMAC實現(xiàn)實際映射的方法為
(6)
信號rin(k)為CMAC的輸入,在每個控制周期結(jié)束時,CMAC輸出un(k)與總控制輸出u(k)相比較,以性能指標(biāo)函數(shù)為計算優(yōu)化依據(jù)來修正權(quán)值,CMAC的性能指標(biāo)函數(shù)為

(7)

(8)
w(k)=w(k-1)+Δw(k)+
α(w(k)-w(k-1))。
(9)
式中:η為網(wǎng)絡(luò)學(xué)習(xí)速率,η∈(0,1);α為慣性量,α∈(0,1)。在系統(tǒng)初始狀態(tài)w=0,此時un=0,u=up,系統(tǒng)主要由PID控制。CMAC通過學(xué)習(xí)產(chǎn)生的輸出逐漸使系統(tǒng)的誤差降低,使PID產(chǎn)生的控制輸出up(k)逐漸為0,直到CMAC網(wǎng)絡(luò)輸出un(k)成為總控制輸出。搭建的CMAC-PID控制算法模型見圖6。
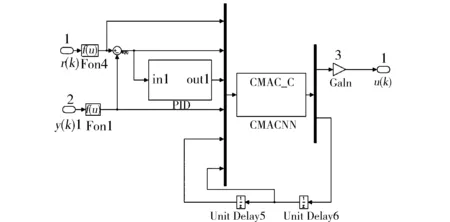
圖6 CMAC-PID控制算法模型
2.2 噴油量控制
根據(jù)柴油機的工況由MAP查得基本噴油量,再結(jié)合發(fā)動機的狀態(tài)參數(shù)進行修正。噴油控制模塊見圖7。

圖7 噴油量控制結(jié)構(gòu)
噴油器的實際噴油量由噴油脈寬、軌壓決定。噴油器噴油量是軌壓與脈寬的函數(shù):
Qinj=f(tinj,prail)。
(10)
式中:tinj為噴油脈寬;prail為油軌壓力。控制策略中通過查詢噴油器特性MAP來計算噴油器的噴油脈寬并進行修正。
2.3 噴油正時控制
噴油正時的確定方式為基本噴油正時加上補償值,基本噴油正時由轉(zhuǎn)速和噴油量查詢MAP得到,補償值包括冷卻水溫補償、大氣壓力補償和大氣溫度補償。此外,還需要考慮噴油正時的最大值、二次噴射間的最小間隔以及噴油器作用時間。模型中噴油正時控制結(jié)構(gòu)見圖8。
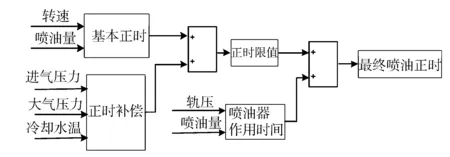
圖8 噴油正時控制結(jié)構(gòu)
為改善燃燒過程,在中低負(fù)荷時使用預(yù)噴,預(yù)噴的噴油量根據(jù)目標(biāo)總油量以及轉(zhuǎn)速查詢MAP并經(jīng)修正后確定,預(yù)噴正時則根據(jù)主噴的正時時刻確定。
3 控制策略驗證
基于實時仿真平臺可以對控制系統(tǒng)進行更接近于實際被控對象的測試與實時調(diào)試,或進行極限條件模擬與故障模擬,對控制策略進行全面、綜合地測試,可以避免在控制策略未完全驗證的情況下進行臺架試驗,從而有效節(jié)約算法驗證成本,減少控制策略開發(fā)的時間,提高控制策略驗證試驗的安全性及可靠性。
控制策略開發(fā)完成后,基于實時仿真平臺,對控制器進行了初步標(biāo)定,并對控制策略的控制效果進行了驗證。控制器與實時仿真平臺聯(lián)合運行,通過實時平臺的上位機監(jiān)控軟件實時控制系統(tǒng)的運行工況,并監(jiān)測控制器中各控制量的變化,進而實現(xiàn)控制器策略的驗證。在驗證過程中,使用測功機模型作為發(fā)動機的負(fù)載,實現(xiàn)發(fā)動機的帶載運行與轉(zhuǎn)速控制,驗證過程見圖9。
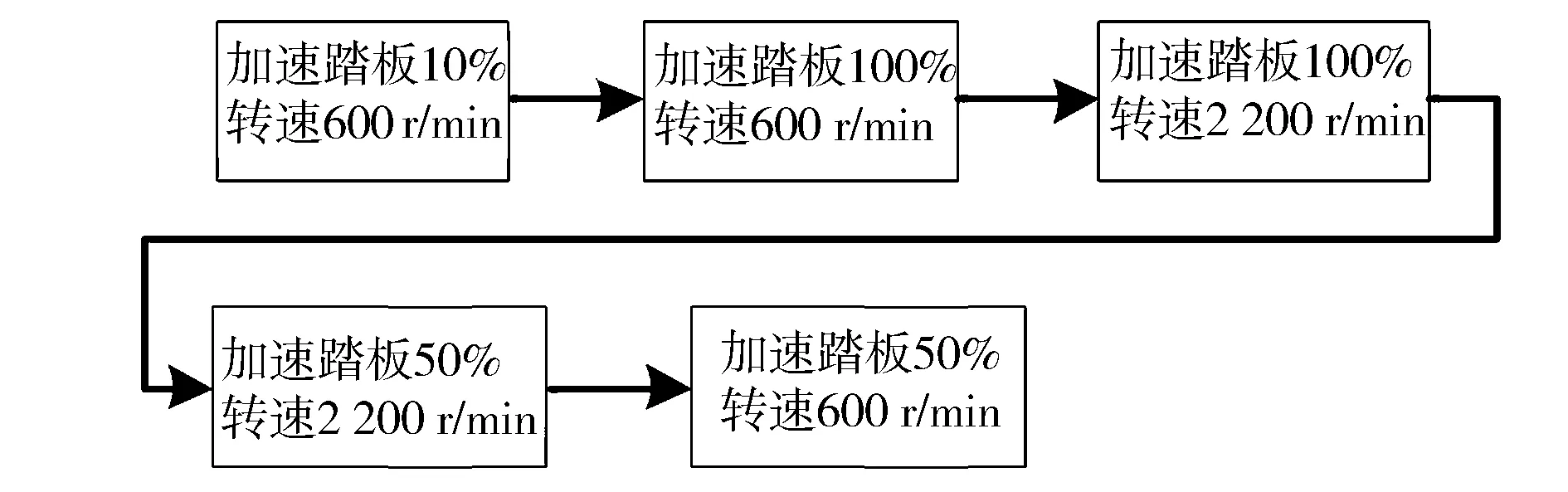
圖9 工況變化過程
圖10示出了目標(biāo)軌壓的跟隨曲線。由圖可見,當(dāng)目標(biāo)軌壓變化時,實際軌壓可以快速響應(yīng),穩(wěn)定時間短,超調(diào)較小,并且軌壓的穩(wěn)定性和精度較好,沒有穩(wěn)態(tài)偏差。
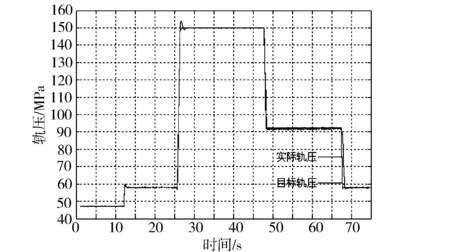
圖10 軌壓控制曲線
圖11和圖12示出了噴油時間和噴油量曲線。由圖可見,控制策略可在中低負(fù)荷區(qū)間實現(xiàn)預(yù)噴與主噴兩次噴射,而在高負(fù)荷階段則僅進行主噴,在轉(zhuǎn)速及負(fù)載變化過程中,噴油時間及噴油量可以快速響應(yīng),沒有出現(xiàn)過大的抖動。
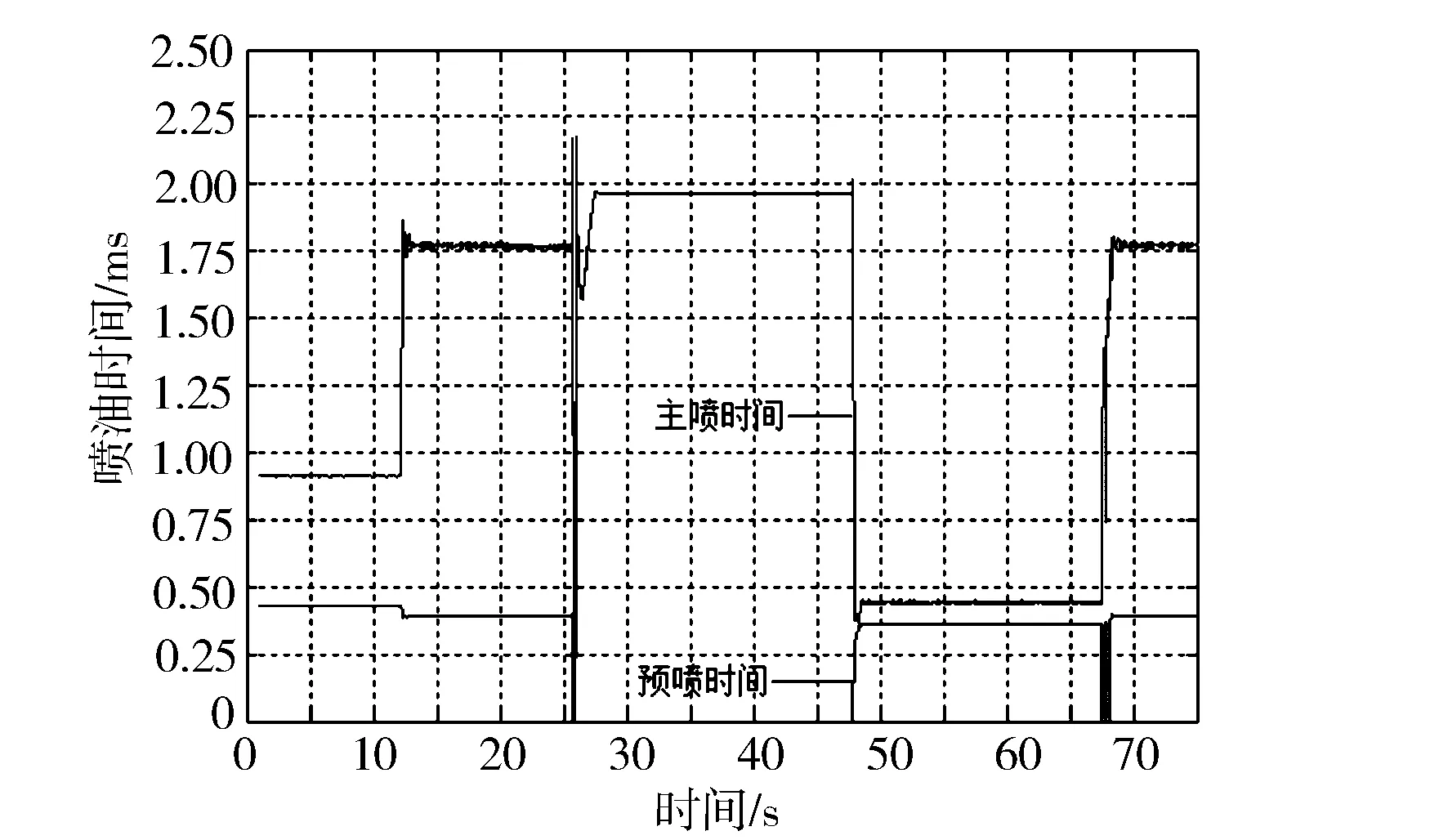
圖11 噴油時間曲線

圖12 噴油量曲線
圖13示出噴油正時曲線。由圖可見,與圖12噴油時間曲線對應(yīng),在中低負(fù)荷區(qū)間具有預(yù)噴與主噴,高負(fù)荷區(qū)間則僅具有主噴。
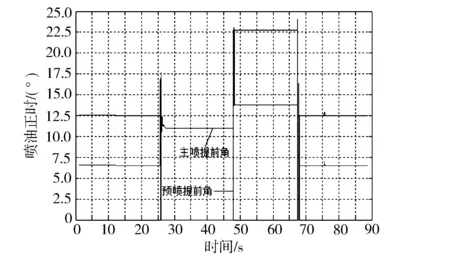
圖13 噴油正時曲線
4 結(jié)束語
針對大功率柴油機控制開發(fā)了相應(yīng)的控制策略,對于關(guān)鍵的油軌壓力閉環(huán)控制部分,采用了復(fù)合PID算法,解決軌壓控制中的存在的問題。對于噴油控制部分則考慮了環(huán)境及柴油機狀態(tài)對噴油時間、噴油正時的修正。為了改善燃燒過程,還加入了預(yù)噴過程。控制策略開發(fā)完成后,基于實時仿真平臺對控制策略進行了調(diào)試與驗證,證明所開發(fā)的控制策略功能完善,控制效果較好,為控制策略的臺架調(diào)試與驗證提供了良好的基礎(chǔ)。
[1] 王尚勇,楊青.柴油機電子控制技術(shù)[M].北京:機械工業(yè)出版社,2005.
[2] 陶永華.新型PID控制及其應(yīng)用[M].2版.北京:機械工業(yè)出版社,2002.
[3] 蔣方毅.基于模型的柴油機硬件在環(huán)仿真與控制研究.[D].武漢:華中科技大學(xué),2009:1-15.
[4] 杜劍維,張寅豹,王銀燕,等.基于dSPACE平臺的柴油機測控系統(tǒng)硬件在環(huán)仿真[J].交通運輸工程學(xué)報,2009,9(3):66-70.
[5] 楊聞睿,敖國強,劉志,等.高壓共軌柴油機ECU硬件在環(huán)仿真系統(tǒng)軟件設(shè)計[J].內(nèi)燃機工程,2009,30(5):41-45.
[6] 朱輝,王麗清,程昌圻.柴油機電控單元硬件在環(huán)仿真系統(tǒng)研究[J].內(nèi)燃機學(xué)報,1998(4):14-23.
[7] 王勤鵬,余永華,楊建國,等.船用中速柴油機電子調(diào)速系統(tǒng)硬件在環(huán)仿真試驗平臺研制[J].船舶工程,2014,36(2):62-65,98.
[8] 趙靖華,洪偉,韓林沛,等.基于enDYNA的柴油機瞬態(tài)EGR控制硬件在環(huán)仿真平臺研究[J].汽車技術(shù),2014(7):24-27.
[9] 劉志,羌嘉曦,陳自強,等.柴油機混合動力總成硬件在環(huán)仿真系統(tǒng)硬件設(shè)計[J].汽車技術(shù),2008(12):8-11.
[10] 王征,楊建國,張偉.大型智能化低速柴油機高壓共軌系統(tǒng)HIL仿真試驗平臺設(shè)計與實現(xiàn)[J].內(nèi)燃機工程,2010,31(6):54-58,64.
[11] 王永庭,張付軍,黃英,等.柴油機各缸供油量不均勻調(diào)節(jié)ECU硬件在環(huán)仿真研究[J].北京理工大學(xué)學(xué)報,2005(1):13-17.
[12] 劉雄,張樹梅,楊林.柴油機混合動力控制器硬件在環(huán)仿真系統(tǒng)設(shè)計[J].車用發(fā)動機,2010(6):11-16.
[13] 王勤鵬,余永華,賀玉海,等.船用中速柴油機高壓共軌硬件在環(huán)仿真平臺開發(fā)[J].柴油機,2016,38(1):5-9.
[14] 齊鯤鵬,隆武強,馮立巖.硬件在環(huán)仿真系統(tǒng)中柴油機工作過程建模研究[J].內(nèi)燃機工程,2007,28(6):49-52.
[15] 譚文春,唐航波,梁鋒,等.柴油機高壓共軌供油系統(tǒng)硬件在環(huán)仿真的設(shè)計[J].上海交通大學(xué)學(xué)報,2004,10:1647-1650,1655.
[16] 祝軻卿,王俊席,楊林,等.GD1柴油機多次噴射協(xié)調(diào)控制策略研究[J].內(nèi)燃機工程,2006,27(4):26-30.
[17] 王金虎, 徐勁松.柴油機高壓共軌燃油噴射系統(tǒng)控制策略研究[J].現(xiàn)代車用動力,2009(1):16-20.
DevelopmentandVerificationofControlStrategyforHighPowerDieselEngineBasedonReal-timeSimulationSystem
CHU Quanhong1,LIU Tao1,HU Yong1,LI Feifei1,YAO Sujuan1,YANG Guohua1, QIU Huibin2,REN Lu1,GUO Min3
(1.China North Engine Research Institute(Tianjin),Tianjin 300400,China;2.Beijing JingweiHiRain Technologies Co.,Ltd.,Beijing 100191,China;3.North General Power Group Co.,Ltd.,Datong 037036,China)
The EMS control strategy was designed for control of high power common rail diesel engine, which included the judgment and switching of operating conditions, injection control and fuel rail pressure control. Based on the real time simulation system, the strategy was adjusted and optimized by the real-time simulation and the rail pressure and injection control were hence verified. Therefore, the control strategy was feasible and could satisfy the demands of engine bench test.
diesel engine;control strategy;real-time simulation
姜曉博]
2017-06-18;
2017-12-01
褚全紅(1968—),男,研究員,主要研究方向為發(fā)動機控制系統(tǒng)和內(nèi)燃機測試儀器;dtaddz@163.com。
10.3969/j.issn.1001-2222.2017.06.011
TK42
B
1001-2222(2017)06-0057-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45