一種優化的嚴反饋非線性系統反推控制
2018-01-04 06:19:39潘建雄
自動化與儀表 2017年11期
潘建雄,孫 卡
(南昌航空大學 信息工程學院,南昌 330063)
一種優化的嚴反饋非線性系統反推控制
潘建雄,孫 卡
(南昌航空大學 信息工程學院,南昌 330063)
該文針對嚴反饋非線性系統在Backstepping算法下進行優化。通過引入一個新的坐標變換,選擇不同于傳統反推控制算法的虛擬控制量。基于Backstepping的設計框架,逐層設計出了系統的虛擬控制律,繼而推出實際的控制器。根據Lyapunov穩定性理論分析,系統各狀態滿足全局漸進穩定。最后對一個三階的嚴反饋非線性系統進行數值仿真,發現系統在參考輸入下,跟蹤誤差滿足全局漸進穩定,并且相對于傳統的反推控制算法,系統的收斂速度提高。證明了該方法可以提高系統的實時性。
非線性系統;嚴反饋;反推設計
嚴反饋非線性系統是下三角非線性系統的一種形式[1],由于其在工程實踐中有著廣泛的適用范圍,越來越受到科研人員的關注[2]。近年來,在嚴反饋非線性系統研究中取得了很多進展。如基于觀測器的反推設計方法[3]、基于神經網絡自適應設計方法[4]、基于模糊控制的自適應設計方法[5]、滑膜控制設計方法[6]等。以上方法在控制調節方面都取得了很好的效果,然后,大多數研究成果的控制算法的計算都相對復雜,在實際系統中,需要強大的運算芯片才能保證時效性。
反推控制對于嚴反饋形式的非線性系統控制有著良好的效果。文獻[7]對反推控制的理論進行了研究,并將其應用在四旋翼飛行器控制器的設計之中。文獻[8]針對純反饋非線性系統進行了控制研究,使用了反步自適應控制和神經網絡自適應控制算法分別對其進行了研究。文獻[9]在神經網絡設計方法的基礎上引入觀測器,對系統中的未知變量進行了處理。為了去除系統的攝動和外界的干擾,文獻[10]提出了一種滑膜變結構的控制方法。文獻[11]在滑膜控制的基礎上,采用了動態二階滑膜面的設計方法,以解決滑膜控制的抖振現象,得到了較好效果。文獻[12]采用了反推控制技術,對隨機純反饋非線性系統,基于模糊控制理論提出了一種自適應模糊容錯控制方案。文獻[13]對一類嚴反饋控制系統,采用了神經網絡動態面控制方法。文獻[14]在神經網絡研究的基礎上進行了改進,采用串級控制的方法,以改善控制效果。文獻[15]基于反推控制方法,對嚴反饋不確定控制系統進行了輸出調節研究,最終得到全局漸進穩定。
本文針對一類嚴反饋非線性系統,利用一個坐標變換,基于反推設計的思想,研究了一類三角結構的非線性系統的鎮定問題,通過設計出的虛擬控制律,進而得到控制器。該控制器保證系統跟蹤誤差全局漸進穩定,并且和傳統的反推控制相比可以提高系統的收斂速度,在實際工程應用中可以提高系統的實時性,擴大了反推設計方法在實踐中的應用范圍。
1 反推控制
Backstepping最早在20世紀80年代由A.Saberi,P.V.Kokotovic和H.J.Sussmann等人對部分線性嚴格反饋的非線性系統研究時提出的。經過眾多學者多年的深入研究,目前已經成為研究線性系統或者是非線性系統控制的重要的方法之一。Backstepping設計方法將Lyapunov穩定性判據和控制器的設計相結合,通過反向設計適用于高階系統,且使系統控制器的設計過程結構化和系統化。它的設計過程為從系統最低階次的方程開始,對每層子系統分別設計控制器,并引入虛擬控制的概念,設計滿足條件的子控制器,最終設計出真正的控制器。其主要思想是將復雜的系統分解為階數較低的子系統,通過對各個子系統構建Lyapunov函數和中間控制量進而推導出整個控制器。
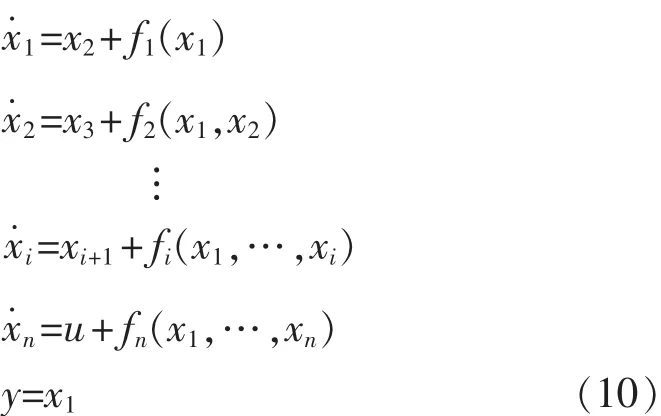
考慮嚴格反饋的非線性系統為

式中:x=[x1,x2,…,xn]T為該系統各狀態變量;u∈R為系統的輸入;fi,gi為光滑的非線性函數,且gi≠0。
根據反推控制理論,我們利用各子系統的虛擬控制律,定義一個由各子系統組成的n維誤差系統:

式中:ai為代表各階子系統的虛擬控制律,根據系統穩定性的判斷理論進行分析,設置虛擬控制律使每一層子系統的狀態分量都漸進穩定。
步驟1對于第一層子系統,選取正定標量函數為

對標量函數進行求導運算:

步驟2對于第二層子系統,選取正定標量函數為

對標量函數進行求導:

步驟i對于第i層子系統,選取虛擬控制律
定義整個系統正定標量函數為

得到最終控制律為

由式(1)~式(4)可知:

從上述證明得到系統的標量函數是正定的,而標量函數的一階導數為負定,根據李雅普諾夫穩定性判據可知整個系統全局漸進穩定。
2 問題描述
考慮如下一類嚴格反饋非線性系統:
式中:x =[x1,…,xn]T∈Rn是系統的狀態;u∈R和y∈R分別為系統的輸入和輸出;函數fi:Ri→R,i=1,2,…,n-1是 C1未知的非線性函數,且滿足fi(0)=0。假設只有輸出向量y是可測量的。
控制目標為在滿足假設的條件時,設計的反推控制器能使嚴反饋非線性系統誤差輸出漸進穩定,即輸出y能穩定地跟隨參考信號yd。
3 控制器的設計
本文采用如下坐標變換:

式中:ai為第i個子系統的虛擬控制律。
此處控制器的設計,選擇了與傳統的反推控制方法不同的虛擬控制量參數。傳統控制器將狀態變量xi作為虛擬控制律的變量。而本文選擇將x˙i-1作為虛擬控制律的變量,其中很大的部分計算都在運算的過程中,用所謂的空間來換時間的方法,憑借現在處理器強大的運算速度,可以提高系統的收斂速度,從而更好地滿足工程實踐中對實時性的要求。采用反推控制框架,控制器的設計分為n步:
步驟 1由式(10)、式(11)、式(12)可知:

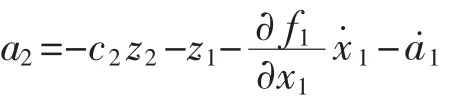
假設虛擬控制律 a1為 a1=-c1z1+y˙d(c1為正的常數),則:

步驟 2由式(10)、式(12)可知:


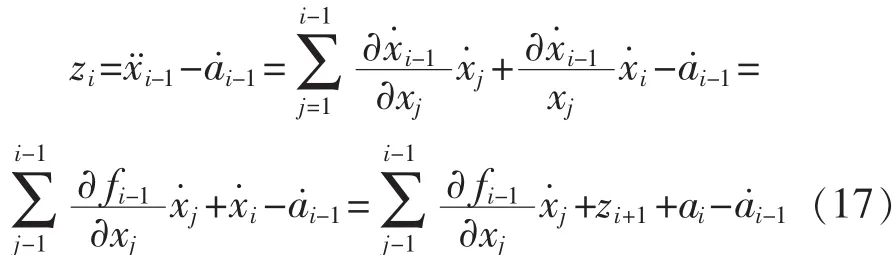
步驟 i(3≤i≤n-1)


步驟 n由式(10)、式(11)、式(12)可知:

假設控制器u為

則

定理1對滿足條件的該類嚴反饋非線性系統(10),采用控制律(20),在系統的平衡點跟蹤誤差全局漸進穩定。
證明選取下面的Lyapunov正定標量函數為

結合式(14)~式(21),對 v 進行求導:

由上式可知,當c1,c2,…,cn的值為正的常數時,正定標量函數的導數為負定,在滿足函數fi:Ri→R,i=1,2,…,n-1 是 C1未知的非線性函數,且fi(0)=0時,系統在所設計的控制器下系統跟蹤誤差全局漸進穩定。
4 實例仿真
考慮一個三階嚴格反饋非線性系統如下所示:
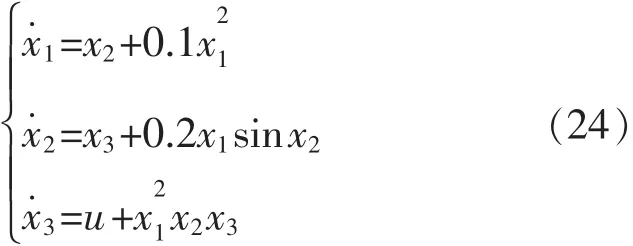
根據上文理論,初始值 x1(0)=0.7,x2(0)=-0.4,x3(0)=0.5,令 c1=c2=c3=1,參考輸入 yd=sin(t)。
仿真結果如圖1~圖4所示。圖1為系統在改進的反推控制算法下輸出跟蹤參考信號的軌跡變化曲線,可以看出,在該控制器的作用下,系統輸出信號能夠實現對參考信號的穩定跟蹤,并且跟蹤誤差逐漸趨于零。圖2為系統在傳統的反推設計算法下輸出跟蹤參考信號的軌跡變化曲線。圖3為改進型反推設計算法下的跟蹤誤差曲線。圖4為傳統反推算法下的跟蹤誤差曲線。其中,圖1和圖2中的標注R代表的是參考曲線,y代表在反推控制算法下的輸出信號。

圖1 改進后的參考跟蹤性能Fig.1 Improved reference tracking performance

圖2 傳統反推控制下的跟蹤性能Fig.2 Tracking performance under traditional backstepping control
從圖3和圖4的跟蹤誤差對比可以看出,傳統的反推算法下,該仿真系統達到穩定的時間是在10 s左右,而采用改進的反推控制方法后,系統達到穩定的時間是6 s左右,改進型的收斂時間明顯短于傳統反推設計算法,即有效地提高系統的收斂速度。

圖3 改進后的跟蹤誤差Fig.3 Improved tracking error
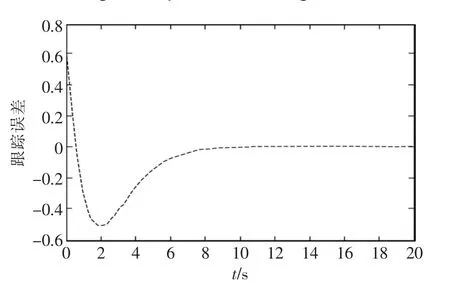
圖4 傳統反推控制下的誤差Fig.4 Error of traditional backstepping control
5 結語
本文針對一類嚴格反饋控制系統的反推控制算法進行改進,基于反推控制的設計框架,引入一個新的變換矩陣,選擇一個不同于傳統反推控制的虛擬控制量,在系統跟蹤誤差滿足全局漸進穩定的同時,相比于傳統的反推控制,提高了系統的收斂速度。最后通過一個仿真試驗驗證了該改進型的反推控制可以提高系統的實時性。
[1] 孟桂芝.不確定非線性系統的輸出調節及其應用[D].哈爾濱:哈爾濱工業大學,2013.
[2] Feng FeiJin,Bao zhu Guo.Lyapunov approach to output feedback stabilization fortheEuler-Bemoullibeam equation with boundary input disturbance[J].Automatica,2015,52(2):95-102.
[3]Witt Thanom,Robert N.K.Loh.Observer-based nonlinear feedback controls for hearbeat ECG tracking syatems[J].Intelligent Control and Automation,2012(3):251-261.
[4] Du Hongbin,ShaoHuihe,YaoPing jing.Adaptive neural network control for a class of low-triangular-structured nonlinear systems[J].IEEE Transactions on Neural Networks,2006,17(2):509-514.
[5] Yong ming Li,Shao cheng Tong,Tie shan Li.Adaptive fuzzy backstepping control design for a lass of pure-feedback switched nonlinear systems[J].Nonlinear Analysis:Hybrid Systems,2015(16):72-80.
[6] 梁勇,尚安利,鄧方林.一類非線性系統的動態面二階滑膜控制[J].控制理論與應用,2004,26(10):1468-1522.
[7] 李天博.基于Backstepping方法的四旋翼無人機飛行器控制器設計[D].遼寧:東北大學,2013.
[8] 劉勇華.純反饋非線性系統控制研究[D].廣東:華南理工大學,2014.
[9] Honghong Wang,Bing Chen,Chong Lin,et al.Observer-based adaptive neural control for a class of nonlinear pure-feedback systems[J].Neurocomputing,2016,171(1):1517-1523.
[10]Han Ho Choi.Output feedback stabilization of uncertain fuzzy systems using variable structure system approach[J].Fuzzy Sets and Systems.2008,16(3):715-724.
[11]汪濤,胡劍波,李飛.一類純反饋非線性系統的反推近似滑膜控制[J].計算機仿真,2015,33(9):358-363.
[12]Shuai Sui,Shaocheng Tong,Yongming Li.Fuzzy adaptive faulttoleranttracking controlofMIMO stochastic pure-feedback nonlinear systems with actuator failure[J].Journal of the Franklin Institute,2014,351(6):3424-3444.
[13]Xu,B.Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form[J].Cybernetics,IEEE Transactions on,2014,44(12):2626-2634.
[14]王良勇.一類嚴反饋非線性系統的神經網絡串級控制及應用[J].電機與控制學報,2013,17(12):106-112.
[15]Riccardo Marino,Cristiano Maria Verrelli.A global feedback output regulating control for uncertain systems in strict feedback form[J].Systems&Control Letters,2009,58(9):682-690.
Optimal of Backstepping Control for Strict-feedback Nonlinear Systems
PAN Jian-xiong,SUN Ka
(College of Information Engineering,Nanchang Hangkong University,Nanchang 330063,China)
In this paper,aiming at optimized the Backstepping control for strict-feedback nonlinear system.By introducing a novel coordinate transformation,select different from traditional backstepping control algorithm of virtual control volume.Based on backstepping framework,the virtual control law of the systems is designed,then introduced the actual controller.It finds that the global asymptotic stability can be achieved when the tracking error of the system is under the control algorithm by analyzing the Lyapunov stability theory.By the end,numerical simulation is carried out on a three order strict-feedback nonlinear system.Under the reference input,the tracking error is globally asymptotically stable and compared with the traditional backstepping control algorithm,the convergence rate of the system is improved,which provides an effective method for improving the real-time performance of system.
nonlinear systems;strict-feedback systems;backstepping
TP273
A
1001-9944(2017)11-0056-04
10.19557/j.cnki.1001-9944.2017.11.013
2017-04-07;
2017-07-24
潘建雄(1992—),男,在讀碩士研究生,研究方向為非線性控制理論研究與嵌入式開發;孫卡(1982—),男,博士,副教授,研究方向為飛行仿真與圖形學。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
