無位置傳感器的BLDC控制設計與調制優化
2018-01-04 02:55:14,
單片機與嵌入式系統應用 2017年12期
,
(蘇州大學 電子信息學院,蘇州 215006)
無位置傳感器的BLDC控制設計與調制優化
潘安樂,陳小平
(蘇州大學 電子信息學院,蘇州 215006)
基于無位置傳感器控制設計了一種可應用于三相直流無刷電機的驅動控制器,采用反電動勢法檢測轉子位置,梯形波驅動控制方式實現BLDC電機的啟轉、運行。介紹了BLDC運行原理及實現無位置傳感控制方法,探討了如何選擇最佳調制方式及電機速度最快時的換相時機,并優化了調制方法。本文設計的控制器具有啟轉順、加速快、防輸出短路等特點,適用于多種高低速、高低電壓BLDC。
無位置傳感器控制;BLDC;IGBT
引 言
直流無刷電機(BLDC)是近幾年來小型電機行業發展最快的品種之一,由于其具有體積小、重量輕、效率高、調速性能好、轉動慣量小、沒有勵磁損耗等問題,因此在多個領域具有廣泛的應用[1]。直流無刷電機控制系統目前主要有三種控制方式:專用集成電路芯片控制、DSP高速控制、單片機控制。以專用集成電路芯片為核心的控制系統結構簡單,但不能靈活地控制各種參數;以DSP為核心的控制系統精度高、速度快,但成本高;以單片機為核心的控制系統具有價格低,片內資源豐富,且可以靈活地編制程序控制等優點[2]。
BLDC控制中轉子位置檢測方法包括有位置傳感器控制和無位置傳感器控制兩種[3]。有位置傳感器控制簡單,但位置傳感器的存在增大了電機體積,增加了電機制造的復雜性,在一些高溫、高濕等特殊應用場合,外置式位置傳感器的可靠性差,有時甚至無法正常工作,在一定程度上限制了其應用范圍[4]。采用無位置傳感器控制,可以縮小電機體積,提高系統抗干擾能力,精確的無位置傳感器控制還能避免位置傳感器可靠性差、安裝精確度不足帶來的換相轉矩脈動。
本文研究的BLDC控制器以NUVOTON MINI54ZDE單片機為控制核心,采用無位置傳感器控制策略[5],輔以驅動電路,實現BLDC電機的控制。硬件采用九電阻檢過零電路,軟件采用PWM_ON調制進行優化控制。控制器從電機啟轉到電機運行考慮非常全面,可適用于多種高低速和高低電壓BLDC的控制。
1 BLDC控制原理
無刷電機主要由旋轉的永磁體(轉子)和三組均勻分布的線圈(A、B、C定子)組成,線圈包圍著定子被固定在外部。電流流經線圈產生磁場,三組磁場相互疊加形成一個矢量磁場,矢量磁場作用在轉子上,使轉子旋轉。
1.1 驅動控制方式
本文設計的控制器采用的驅動方法是兩兩導通[6]三相六狀態。其工作原理是通過逆變功率開關管按一定的規律導通和關斷,使電機定子電樞繞組中產生按某一電角度不斷步進的旋轉磁場,永磁體在磁場中受力旋轉。在順時針旋轉的情況下,完整的一個周期換相順序應為AB→AC→BC→BA→CA→CB→AB。
圖1是電機在定子通電相由AB→AC轉換過程中,即定子電樞的磁勢由Fa1向Fa2的跳躍步進過程中,轉子由Ff1轉向Ff2的過程。
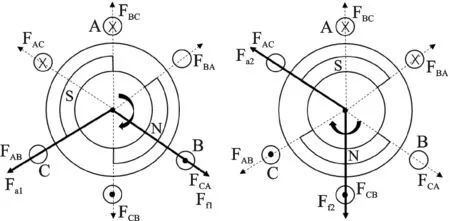
圖1 電機旋轉換相工作原理
1.2 轉子位置確定
1.2.1 BLDC反電動勢
控制器采用兩兩導通三相六狀態方式控制無刷電機,其導通相與感生電動勢的關系如圖2所示。三相繞組中,任意時刻總有一相處于斷開狀態,該斷開相的反電動勢總會有過零點產生。
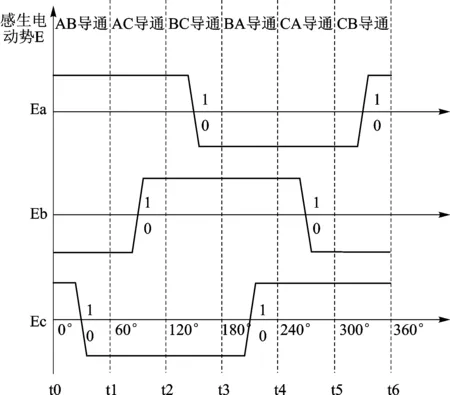
圖2 導通相與感生電動勢關系
1.2.2 直接反電勢過零法
由于BLDC反電動勢的過零點與換相時機有圖2所示的關系,因此只要在檢測到斷開相反電動勢的過零點之后30°電角度時,依照開關管導通順序進行換相,即可控制電機的正常運轉。本設計采用直接反電勢過零法測斷開相的反電動勢過零點,所謂直接反電勢法,又叫九電阻法測過零點,即將斷開相的反電動勢波形通過9個電阻處理后接入MINI51芯片內部的過零比較器,單片機測得接入相的過零點,并在得到過零點之后延時一定電角度再進行換相控制。
1.3 BLDC的調速
由直流無刷電動機的基本原理可知,改變加在電機繞組兩端的電壓可以改變電機的轉速,即改變加在直流無刷電動機繞組上的PWM信號的占空比就可以實現電機的調速。
2 控制器硬件設計
2.1 電路結構
本控制器的使用對象是無位置傳感器的直流無刷電機,其內部繞組是三相星形連接,采用三相星形全橋驅動、兩兩導通三相六狀態的工作方式。系統的電路結構如圖3所示。6個PWM輸出連接到3對IGBT驅動器(FD2501),最終連接到6個IGBT(SM4023),BLDC電機繞組以三相橋式連接到這些IGBT。同時,九電阻測電機的反電動勢過零點。
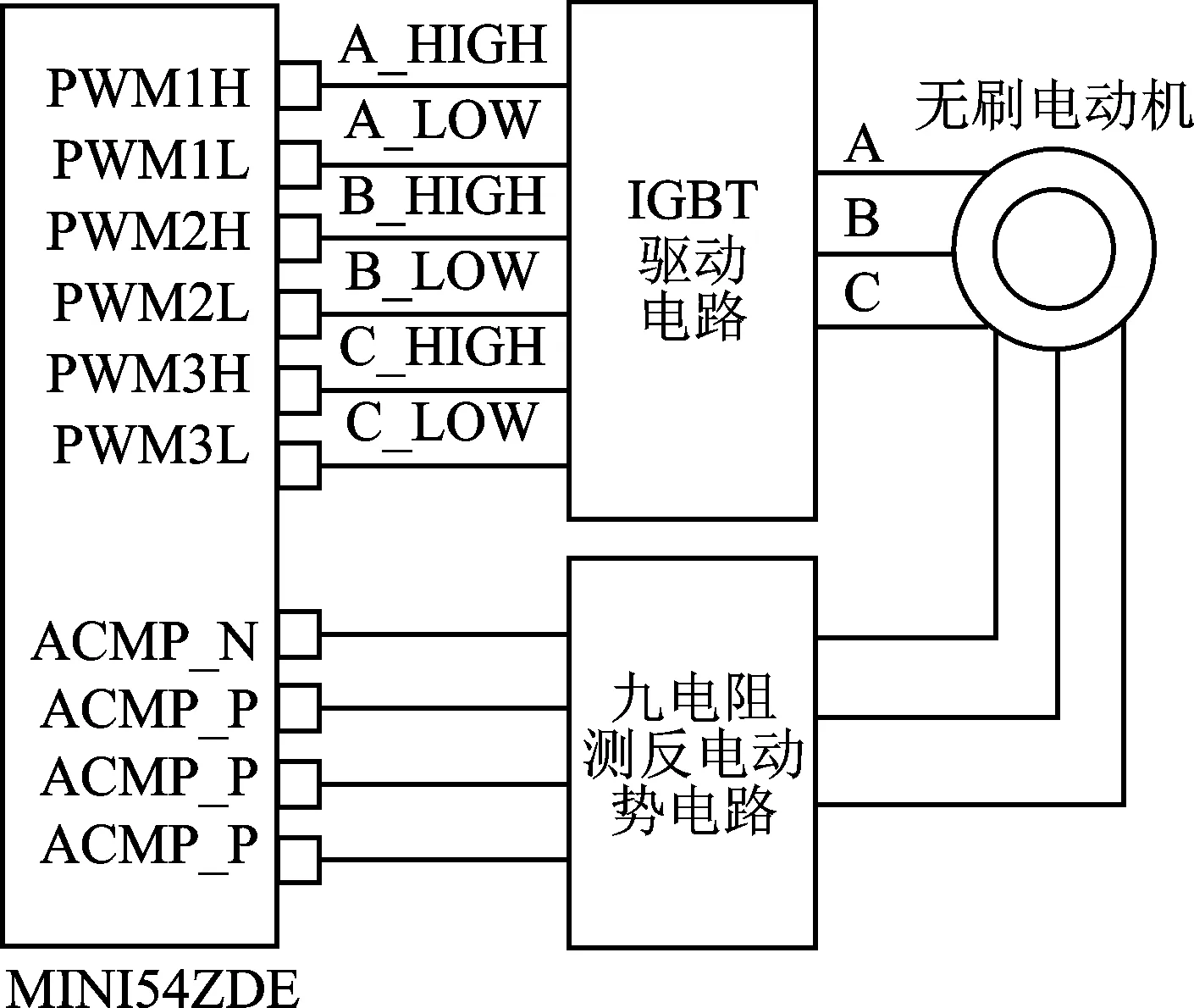
圖3 電路結構
設計中采用的驅動芯片FD2501是一個內置欠壓保護功能的高電壓、高速柵極驅動器,MOS管型號為SM4023,其VDS最大承載電壓可至40 V,低頻時漏極持續電流ID可達31 A,滿足大功率驅動控制器的設計需求。
2.2 九電阻電路
在本設計中采用直接反電勢過零法獲得電機的反電動勢零點,以實現無位置傳感器的控制,過零檢測電路由9個電阻組成,具體接法如圖4所示,ACMP_P、ACMP_N為過零比較器的P、N端,A、B、C為電機的三相繞組端。由于采用24 V電源的電機,鑒于主控芯片電源為5 V的限制,從三相繞組接下來的電阻阻值選取10 kΩ與1 kΩ的比值,可有效檢測反電動勢的過零點。
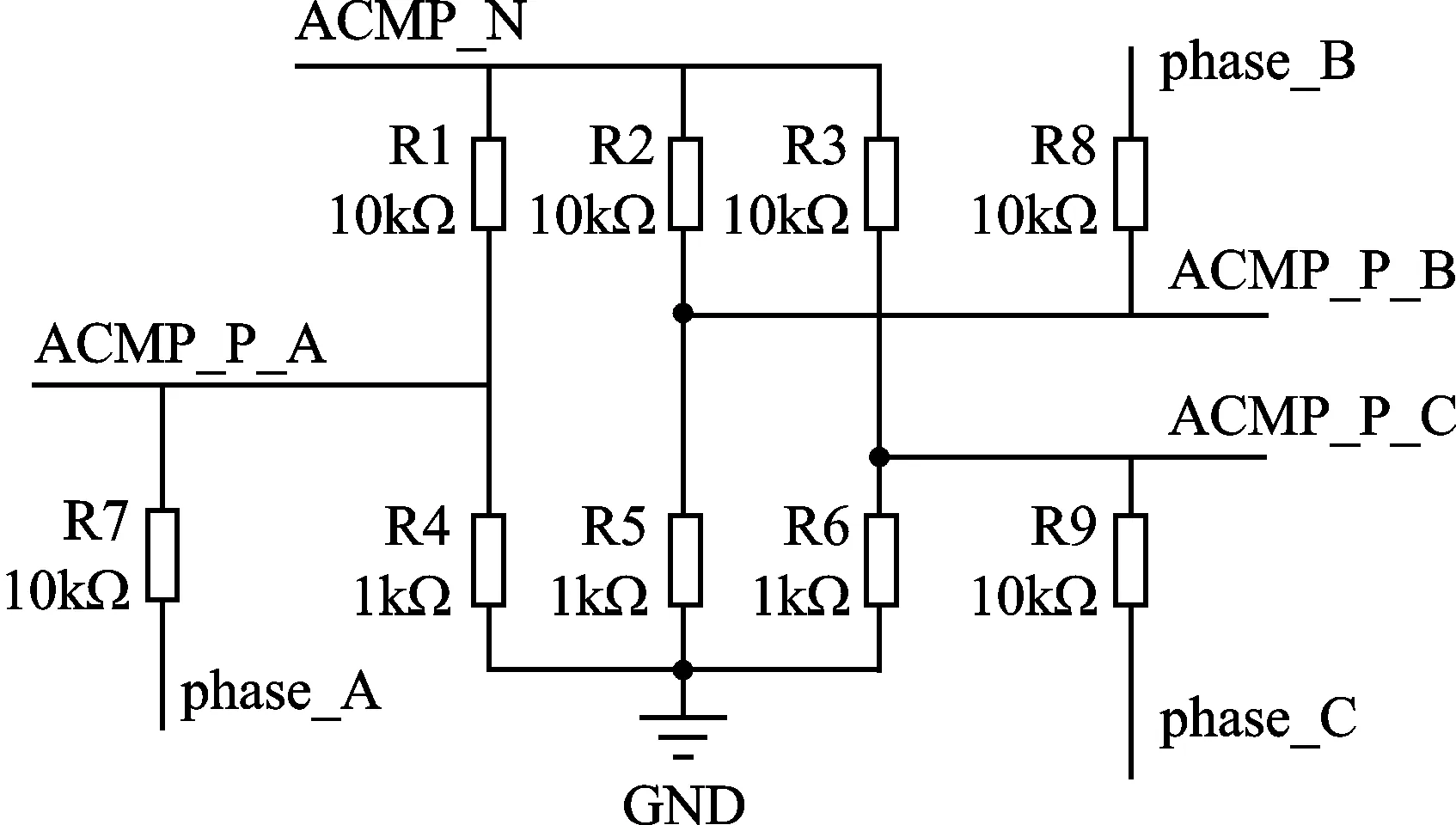
圖4 九電阻電路
2.3 IGBT驅動電路
對于典型的三相直流無刷電機,在正常工作時有6個不同工作區間,產生的三相六狀態波形由全波逆變電路產生。如圖5所示,6個功率開關管控制三相繞組兩兩通斷,三相六狀態方式即每個時刻只有上下橋中一個橋臂的開關管導通,每隔1/6周期(即60°電角度)換相一次,每個開關管一次導通120°電角度。正轉時,各開關管導通順序為:T1T4→T1T6→T3T6→T3T2→T5T2→T5T4→T1T4。
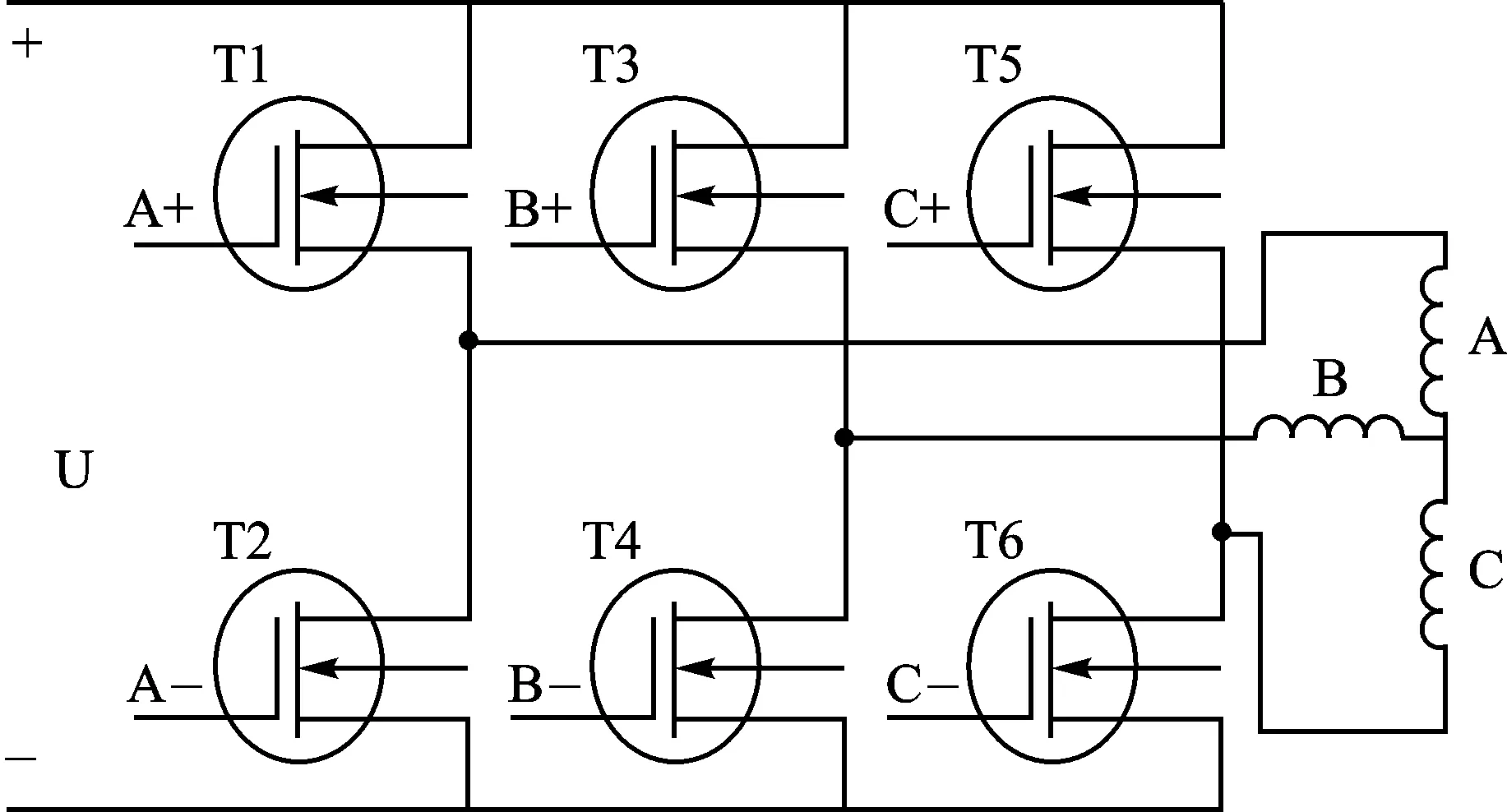
圖5 IGBT驅動電路
3 控制器軟件設計
3.1 控制流程
本文設計的控制器包括高速和低速兩個檔位,具有欠壓保護和防輸出短路功能。程序初始化之后在主函數里檢測欠壓及目標速度標志,進行欠壓保護及電機速度的控制。換相動作及定時器數值的更新在定時器Timer1中斷里進行。主程序里主要的控制流程如圖6所示。
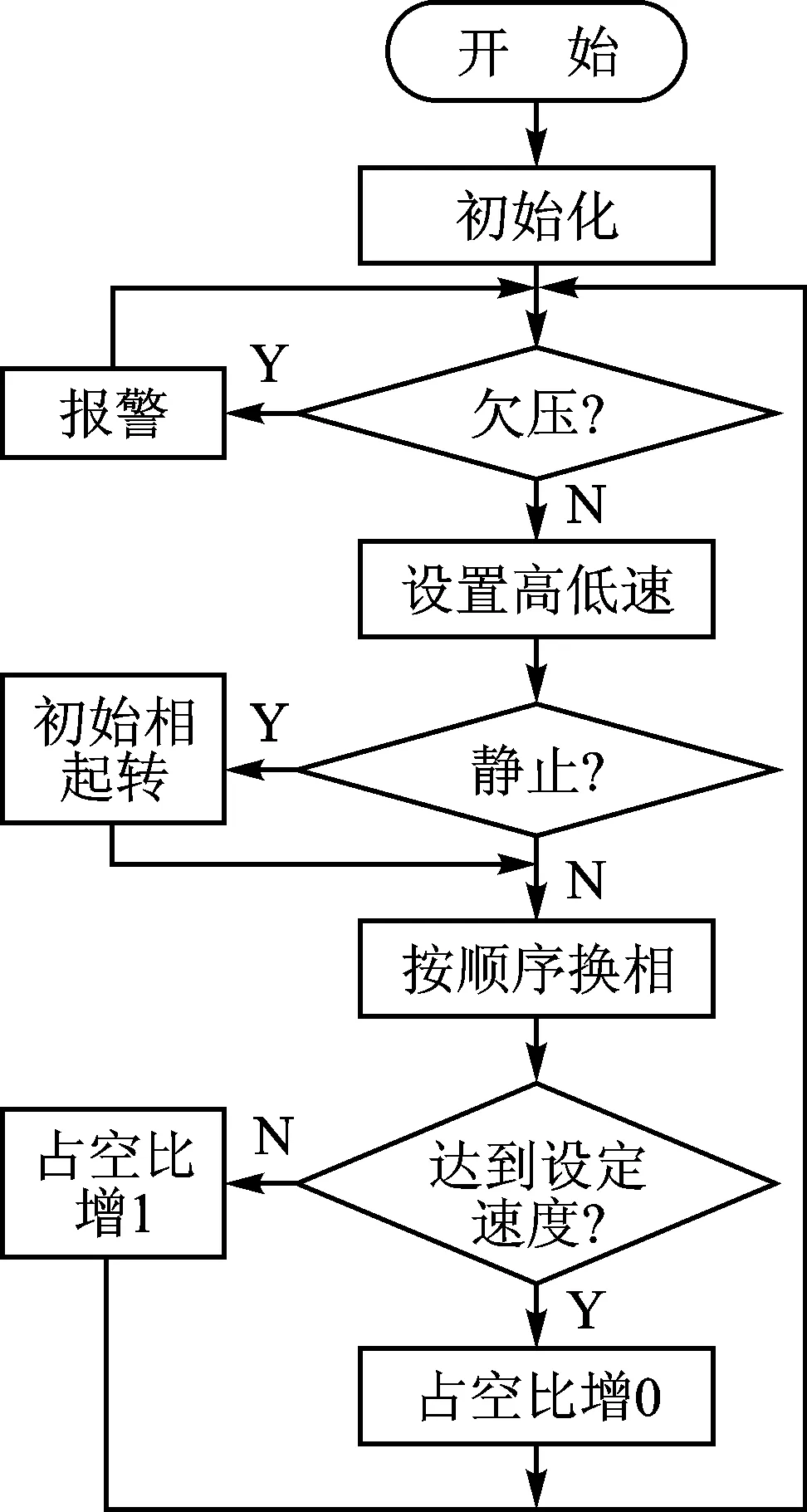
圖6 控制流程圖
3.2 電機啟動設計
電機上電后根據初始狀態決定如何進行啟轉,具體分為以下兩種情況:
(1)靜止啟轉
BLDC轉起來才能檢測到過零,本設計中首次通電換相時間取60 ms。線圈若剛好對準永磁體,通電時間再長也不會轉,因此在Timer1中斷中,若超時2倍換相時間仍未檢測到過零,就不再等待,直接換下一相。
靜止加速時采用三段式啟動法,它分為預定位、外同步加速、自同步3個階段。預定位階段采用預先給任意兩相定子繞組通電,利用合成定子磁勢把轉子軸線拖到與合成磁勢重合的位置。外同步加速階段通過控制占空比增量逐漸提高電機外同步狀態外施電壓,使電機轉速不斷增大,直至反電動勢增大到可以檢測出來的時候切換到自同步狀態。
(2)非靜止啟轉
啟轉前若BLDC已經在轉,測到過零點后延時半個周期或立即從下一相通電,就可以直接順暢啟轉。
本設計通過測某一斷開相是否有周期過零事件來判斷電機是否在轉,如測到斷開相周期性的過零事件,說明電機在轉動,只需按順序從下一相通電便可使電機繼續旋轉。
3.3 檢過零→換相
軟件設計中使用兩個定時器:Timer1連續定時模式用于定時檢測過零點,首次取5 ms進中斷;Timer0周期模式用于觸發換相,首次取60 ms換相周期。每次在Timer1中斷里檢測到過零后,Timer1和Timer0定時器的溢出值迭代更新,具體的時間流圖如圖7所示。
在電機運轉時,檢過零之后的30°電角度為最佳換相時機,每次換相后,要改變驅動上、下IGBT的PWM輸出引腳,還要切換比較器的輸入引腳。本控制器使用的NUVOTON主控芯片MINI51系列具有如下功能: ①換相寄存器:PWM→PHCHG,寫該寄存器完成上述三個動作。②定時器溢出時,自動換相:PWM→PHCHGNXT中的值會自動寫入換相寄存器PWM→PHCHG。
3.4 防輸出短路
控制器啟用芯片的Brake功能,過流立即關斷IGBT。經測試,即使在電機轉動時短接輸出,也不會燒功率管。
4 調制方法優化
4.1 最佳PWM調制方式
現有的BLDC調制方式有PWM_ON、ON_PWM、H_PWM-L_ON、H_ON-L_PWM、H_PWM-L_PWM這5種調制方式[7],5種調制方式的區別在于開關管的損耗及電機的電磁轉矩脈動不同。所謂的轉矩脈動是在電機轉動的過程中,瞬時輸出力矩隨時間不斷變化,但是卻圍繞某一平均值上下變動的現象。
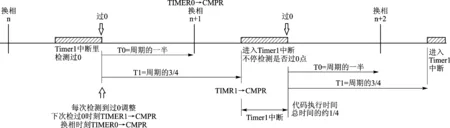
圖7 檢過零→換相時間流圖
在PWM_ON調制方式下功率管開關次數最少,6個功率管的開關損耗得到均勻分配,同時在換相過程中產生的轉矩脈動最小,與其他4種調制方式相比具有更好的控制效果。因此本設計采用PWM_ON調制方式,即在開關管導通的120°期間,前60°進行PWM調制,后60°保持恒通。
4.2 高速運轉
4.2.1 最佳換相
磁鐵的旋轉是連續的,電壓最大的位置是定子矢量磁場,比磁鐵超前90°。此時供電電壓比磁鐵超前90°,力矩和效率是最佳的,弦波驅動方式就是讓電磁場總是與磁鐵成90°,方波驅動方式只能讓電磁場與磁鐵的夾角在90°的前后30°范圍內變化。
過零檢測后再延時一半時間換相,剛好前后各30°,當二者夾角不是90°時,可以把電磁場(或磁鐵)作90°分解,分解成一個水平分量,一個垂直分量。 當夾角小于90°時,分解合成的結果相當于磁鐵磁性增強了,所以轉矩會增大,轉速會降低。夾角大于90°時,分解合成的結果相當于磁鐵磁性減弱了,電機轉矩會減小,但是轉速會加快。
4.2.2 轉速最快換相
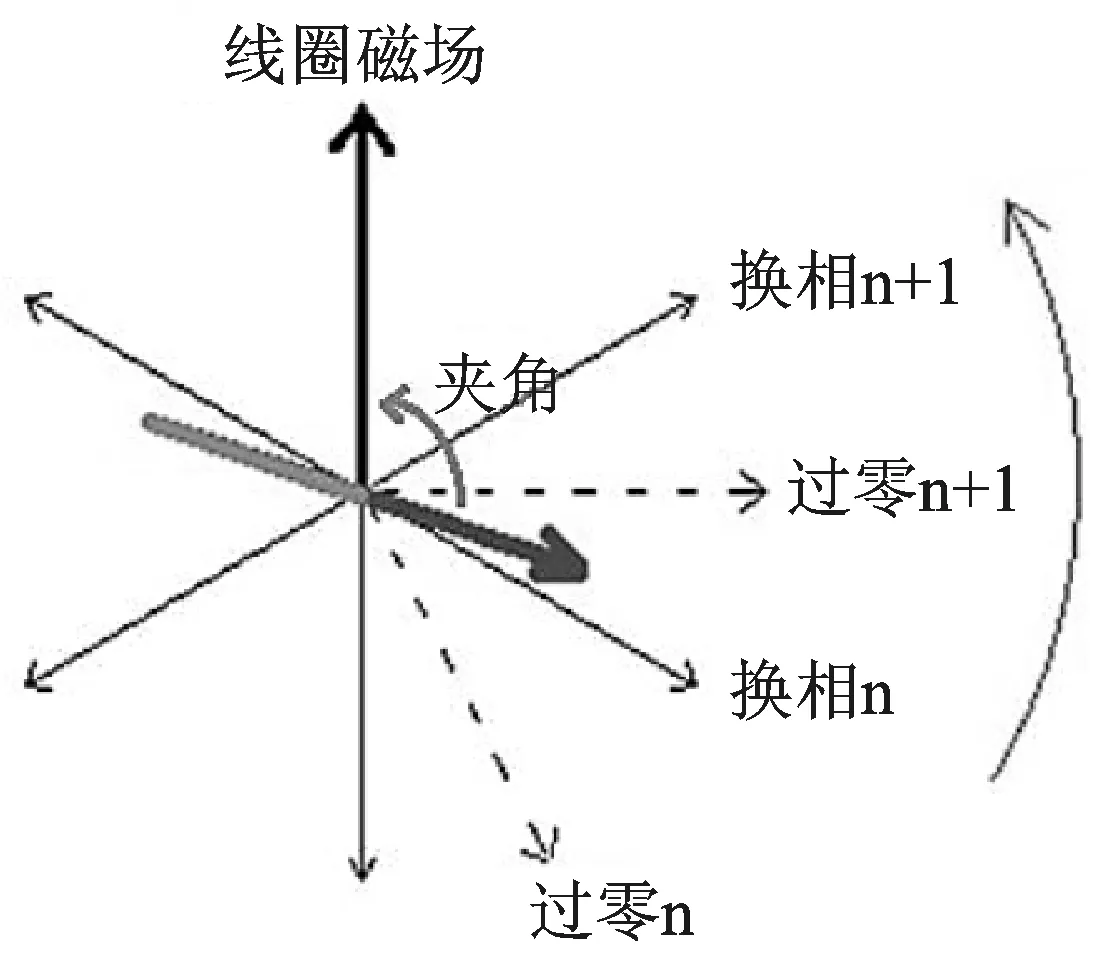
圖8 線圈磁場與轉子夾角示意圖
如果過零之后立即換相,平均夾角就是120°(如圖8所示),則磁鐵與線圈磁場有一個180°的分量,分解后磁鐵相當于磁性減弱,此時力矩會損失很多,并且電流會增大較多,但電機速度最快,比最佳換相時機的速度要快5%。
轉速可根據前后兩次檢測過零時間的差值算出。兩次檢測過零時,Timer1定時器讀數的差值即是當前的換相周期PeriodNow,為當前換相時間微秒數。6次換相是一個電轉周期,其倒數就是每秒電轉速,再乘60就是每分鐘轉速。電機每分鐘電轉速計算公式是:
60×(106μs/(PeriodNow×6))=107/PeriodNow
5 控制器測試
BLDC控制器設計完成后,成功驅動一款直流無刷電機,并在該BLDC控制器上以家用吸塵器的測試標準IEC60312進行了兩種換相情況下的測試,測試的部分數據如表1、表2所列。
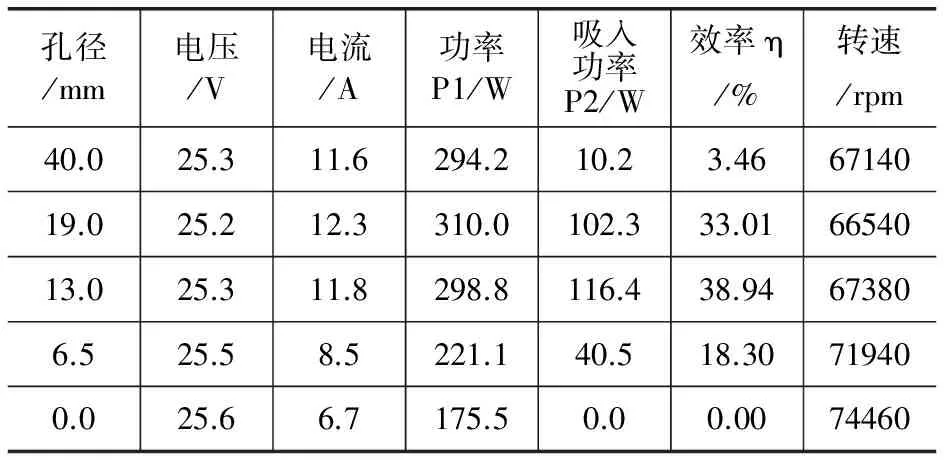
表1 過零后延時30°換相
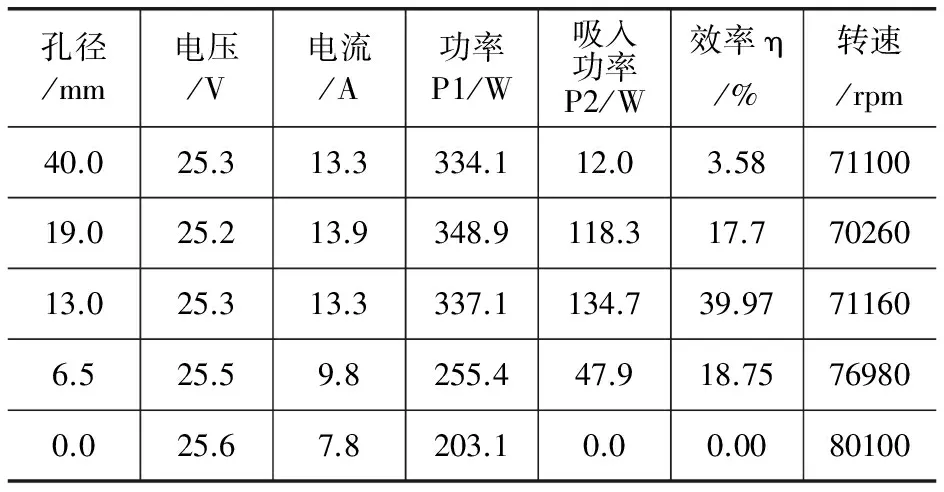
表2 過零后立即換相
兩種情況下的測試數據表明,在梯形波控制方式下,相同的測試環境,相比于最佳的換相時機,過零后立即換相電機的轉速大約提高5%,本測試使用的直流無刷電機在全速運行情況下,轉速最高可達八萬多rpm,同時瞬時效率也有一定的提高。理論上本控制器最高可驅動二十萬轉左右的直流無刷電機,滿足大功率電機的驅動要求。
DesignandModulationOptimizationofPositionSensorlessBLDCControlSystem
PanAnle,ChenXiaoping
(School of Electronic Information,Soochow University,Suzhou 215006,China)
In the paper,a driving controller is designed based on the position sensorless control method,which can be applied to three-phase brushless DC motor.The rotor position is detected by back EMF method,and the trapezoidal wave drive control mode is used to achieve the normal rotation of the motor.The operation principle of BLDC and how to realize the sensorless position control of the controller are introduced.How to select the best modulation mode and the commutation time of the fastest speed of the motor are discussed,then optimizes the modulation method.The controller designed in this paper has the advantages of smooth start,fast acceleration and output short-circuit prevention,it can be applied to various BLDC motors.
position sensorless control;BLDC;IGBT
TP273.1
A