基于RTU的兩主一備水泵控制系統設計
2018-01-05 02:01:21徐高志景波云
自動化與儀表 2017年8期
關鍵詞:泵站
徐高志,景波云
(南瑞集團公司(國網電力科學研究院),南京210003)
基于RTU的兩主一備水泵控制系統設計
徐高志,景波云
(南瑞集團公司(國網電力科學研究院),南京210003)
該文根據水利泵站的控制要求,詳細介紹了基于RTU的兩主一備水泵控制系統設計方案,該系統能夠根據檢測到的水位數據以及預設的閾值輸出水泵控制信號,實現無人值守條件下水泵的自動控制。
泵站;遠程終端設備;控制系統
遠程終端設備RTU[1]是一種能夠在現場安裝并可以集成多種傳感器的遠程測控裝置,一般負責現場傳感器信號的采集并通過遠程信道傳輸至中心站數據平臺。隨著自動化技術的不斷發展,RTU的功能也越來越強大,從以往簡單的遙測終端發展為具有遙測、遙信、遙調、遙控功能的綜合裝置,已經能夠在一些中小型閘泵站監控系統中代替PLC[2-3]。本文以水利泵站為研究對象,基于RTU開發了一套無人值守的泵站控制系統。
1 系統結構設計
本系統主要由以RTU為核心的泵站控制系統和中心站數據平臺兩部分組成。其中以RTU為核心的泵站控制系統將所采集到的水位數據信息與所設置的水位閾值進行比較后,實現現地控制水泵啟停。同時將所采集的水位數據按照預定數據格式進行打包處理,通過RS232串口傳送給GPRS通信模塊,最后由因特網將數據傳送至中心站數據平臺。中心站數據平臺接收到數據后,進行數據解包處理,最終將所得到的水位數據信息進行數據顯示以及存儲。中心站數據平臺可以遠程下發命令控制水泵啟停。本系統結構如圖1所示。
2 系統軟硬件設計
2.1 系統硬件組成
為實現對泵站中各種設備的自動數據采集與控制[4-6],構建了一套基于RTU為核心的泵站控制系統。本控制系統包括水位檢測單元、RTU單元、電源單元以及遠程通信單元。其中,水位檢測單元主要實現對水位信號的采集和轉換;RTU單元主要實現對水位信號的實時采集與處理,與所設定的水位閾值相比較后作出判斷,RTU單元可以輸出控制對應于第一上限水位的水泵、第二上限水位的水泵以及備用水泵的啟停命令,實現對水泵的自動控制;電源單元主要為RTU進行供電;遠程通信單元主要接收RTU所發送的水位數據信息,然后通過GPRS網絡傳送至中心站數據平臺。基于RTU的泵站控制系統如圖2所示。
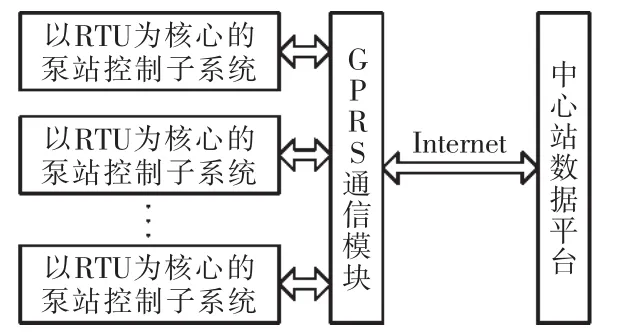
圖1 水泵遠程控制系統結構Fig.1 Structure of water pump remote control system
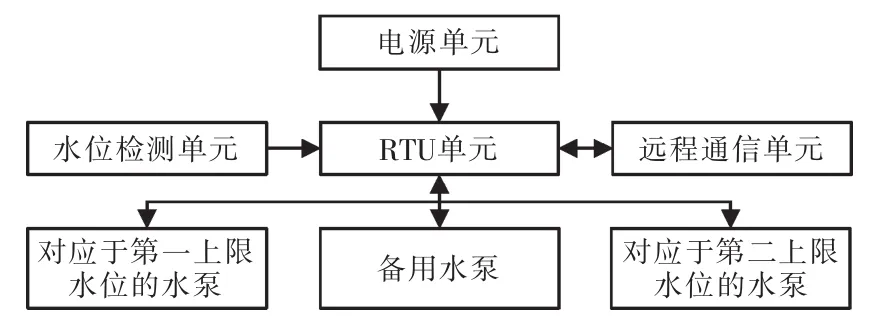
圖2 基于RTU的泵站控制系統Fig.2 Pump station control system based on RTU
2.1.1 水位檢測單元
水位檢測單元主要采用超聲波傳感器進行水位測量,其測量精度較高且性能穩定。該水位檢測單元的原理是將超聲波傳感器安裝在水泵的進水端,超聲波傳感器探頭垂直于水面,利用超聲波測出超聲波傳感器到水面的距離,然后根據超聲波傳感器到池底的高度,間接測量出水位高度。設超聲波傳感器安裝位置距離池底高度為H,超聲波傳感器工作時,測得的值為h1,也就是其到水面的高度,那么就可以得到測量的水位高度h2=H-h1。
2.1.2 RTU單元
RTU單元主要采用NARI公司研制的ACS300-MM作為主控制模塊,其具有寬工作溫度范圍、極低的靜態功耗、強大的遠程通信等功能,配有1個RS485通訊編程接口,4個RS232串行口(用于遠程通信、本地顯示或參數設置),支持遠程/本地程序下載,供電電壓為10.8 Vdc~16 Vdc,具有電源極性防反接保護功能。
RTU單元采用RS485通信協議與超聲波傳感器進行通信并實時采集水位信息,與設定的水位閾值相比較后作出判斷。如果所采集到的水位信息大于第一上限水位閾值,則RTU單元輸出對應于第一上限水位的水泵啟動命令;為了解決由于水位上漲過快而造成不必要的損失,RTU單元設定了第二上限水位閾值,如果所采集的水位信息大于第二上限水位閾值,則RTU單元輸出對應于第二上限水位的水泵啟動命令;如果RTU單元沒有接收到對應于第一上限水位的水泵或者第二上限水位的水泵啟動的反饋信號,即出現故障,RTU單元可以輸出備用水泵啟動命令;所采集的水位信息與設定的停機水位閾值相比較,RTU單元可以輸出對所有水泵的停機命令,從而實現對水泵的自動控制。
2.1.3 電源單元
電源單元主要通過蓄電池和太陽能電池板給系統供電,蓄電池采用12 V標準電壓,通過供電電路為RTU供電。當蓄電池電壓較低時,太陽能電池板可以通過充電電路給蓄電池充電,從而保證蓄電池能夠有效地處于工作狀態,極大地延長了蓄電池的供電時間。同時由于RTU具有極低的靜態功耗,工作時所消耗的電能遠低于PLC,因此在無人值守的條件下,解決了系統的長時間供電問題,相比較于PLC具有極大的優勢。
2.1.4 遠程通信單元
遠程通信單元主要采用宏電公司自主研發的H7210型號遠程通信模塊。其支持多數據中心、純透明模式傳輸等功能,配有1個RS232串行口,波特率范圍為300~115200 b/s,工作溫度范圍為-30℃~+75℃,供電電壓為5 Vdc~36 Vdc。遠程通信單元采用串行口接收RTU單元發送的數據信息,然后通過GPRS將數據信息發送到中心站數據平臺。同時也可以接收中心站數據平臺下發的遠程命令,由串行口發送給RTU單元執行相應的命令。
2.2 系統軟件設計的實現
2.2.1 RTU單元軟件設計實現
根據水利泵站的控制要求,實現對不同水位進行相應的水泵控制。當水位達到第一上限水位閾值時,通過RTU單元自動控制一臺對應于第一上限水位的水泵啟動;當水位達到第二上限水位閾值時,通過RTU單元自動控制另一臺對應于第二上限水位的水泵啟動;當其中有一臺水泵出現故障時,自動切換到備用水泵,控制備用水泵啟動;當水位降到停機水位時,RTU單元自動控制所有水泵停止運行。RTU單元軟件設計流程如圖3所示。
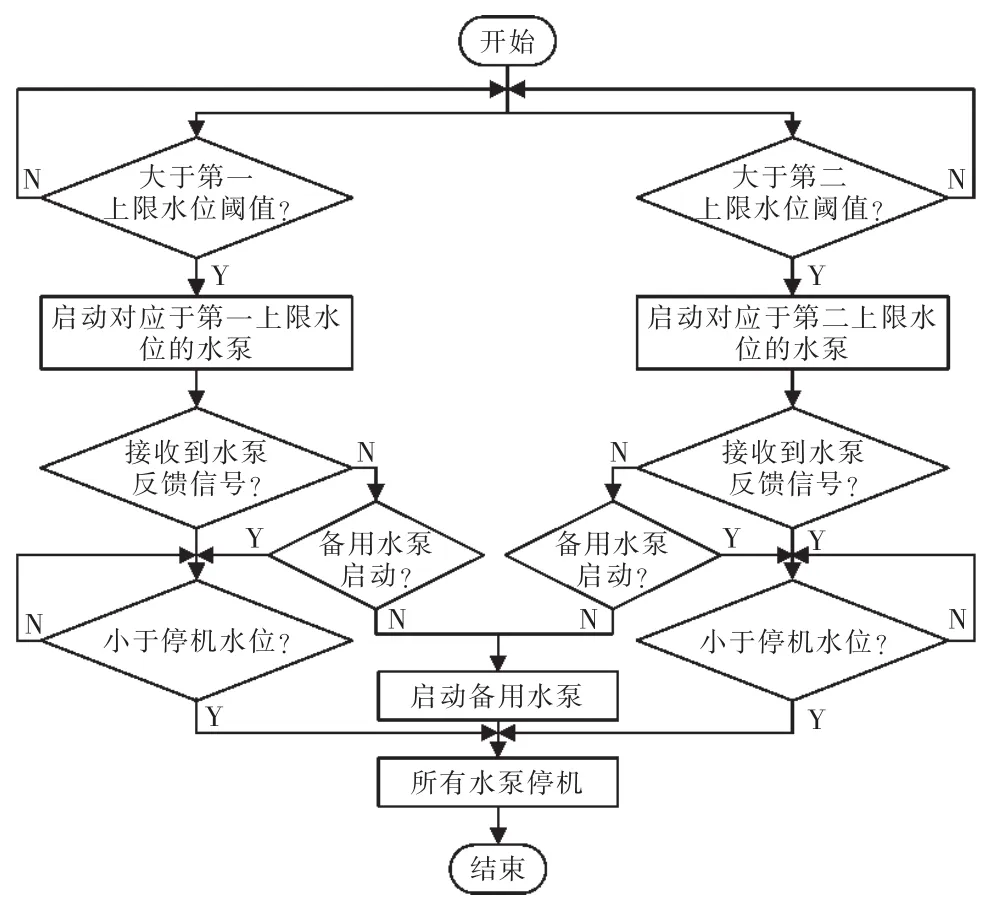
圖3 RTU單元軟件設計工作流程Fig.3 Flow chart of software design for RTU unit
2.2.2 遠程控制軟件設計實現
中心站數據平臺實時接收到水位數據后進行顯示,人工可以根據水位數據進行判斷,如果需要啟動對應于第一上限水位的水泵,則可以發送遠程控制命令進行啟動;如果需要關閉,則可以發送遠程控制命令進行停止。對應于第二上限水位的水泵的啟動和停止都可以分別通過發送遠程控制命令進行操作。同時,為了保證水泵的正常啟動和停止,遠程控制的優先級小于RTU單元的軟件控制優先級。圖4為遠程控制軟件設計工作流程。
2.2.3 上位機軟件界面設計
中心站數據平臺主要采用NARI公司自主研發的ACSCOMM上位機軟件,其具有完善的功能、操作簡單方便、維護性強等特點,通過遠程通信實時接收遙測站發送的水位數據,進行顯示并存儲。可以通過上位機軟件界面進行操作,實現遠程控制水泵運行與停止。上位機軟件界面設計如圖5所示。
3 工程應用實現
基于RTU為核心的泵站控制系統在現場實際投運,現場通信良好,RTU單元以及遠程通信單元都配有指示燈來顯示工作狀態,使現場工作情況一目了然,極大地方便后期維護。系統上電工作時,RTU定時采集水位數據,根據預設閾值判斷,控制水泵啟停。同時遠程傳輸水位數據信息至中心站數據平臺。其系統接線圖如圖6所示。
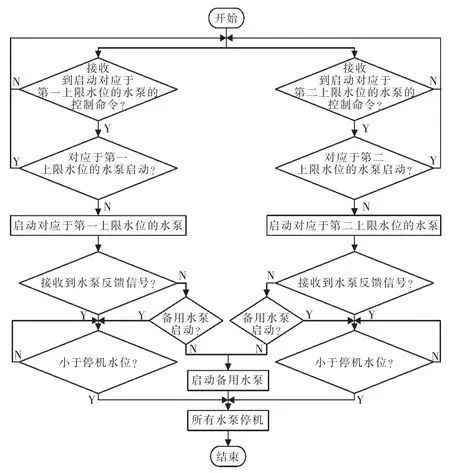
圖4 遠程控制軟件設計工作流程Fig.4 Working flow chart of remote control software design
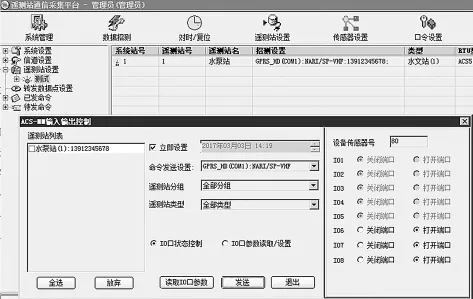
圖5 上位機軟件界面設計Fig.5 Upper computer software interface design
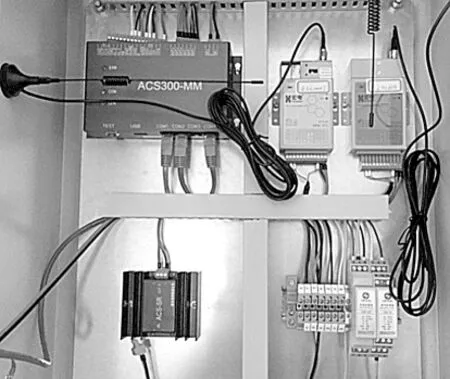
圖6 基于RTU的泵站控制系統現場接線圖Fig.6 Field wiring diagram of pumping station control system based on RTU
中心站數據平臺接收GPRS數據后,對數據進行處理,然后將得到的水位數據進行顯示和存儲,水位數據記錄如圖7所示。
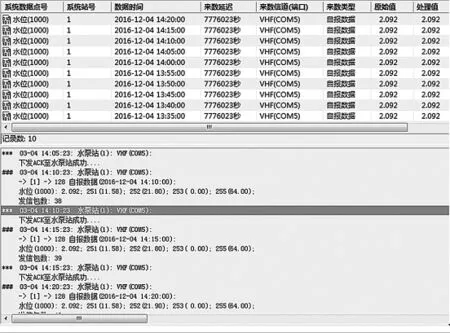
圖7 水位數據記錄Fig.7 Record of water level data
4 結語
基于RTU的兩主一備水泵控制系統能夠根據水位數據的變化,通過與設定的水位閾值相比較,實現對第一上限水位的水泵、第二上限水位的水泵以及備用水泵啟停的精準控制,以及在無人值守條件下,針對第一上限水位的水泵、第二上限水位的水泵出現故障時,也能夠控制備用水泵進行工作,極大地保證了水泵控制系統能夠有效運行。同時系統采用蓄電池和太陽能電池板供電,解決了長時間供電問題,相比較于PLC具有很大優勢。該系統運行可靠、穩定,滿足實際的工程應用需求。
[1] 仵俊偉,李為田,張焱.RTU在遠程監控液量自動計量系統中的應用[J].自動化儀表 2009,30(10):64-65.
[2] 張鋒,張大為,胡詳文.PLC在雨水泵站控制系統中的應用[J].數字技術與應用,2011,3(8):122-123.
[3] 何平,王紀坤,蔡敬坤.基于PLC的雨水泵站控制系統設計[J].艦船電子工程,2010,30(8):183-185.
[4] 李紅斌,婁玲玉.基于PLC的泵站控制系統設計與實現[J].裝備制造技術,2015,5(1):155-156.
[5] 閆廣新,晁勤,陳志偉.基于LOGO!的一主一備循環水泵控制系統設計[J].河南理工大學學報,2006,25(1):50-53.
[6] 孫丙科.煤礦抗災潛水泵自動控制系統設計[J].工礦自動化,2015,41(2):97-99.
Design of Pump Control System with Two Master One Reserve Based on RTU
XU Gao-zhi,JING Bo-yun
(NARI Group Corporation(State Grid Electric Power Research Institute),Nanjing 210003,China)
According to the control requirements of hydraulic pump station,the design scheme of pump control system with two master one reserve based on RTU is introduced in detail and the system can export pump control signal depending on the detected water level data and the preset threshold,realizing the unattended water pump under the condition of automatic control.
pump station;remote terminal unit(RTU);control system
TP391
B
1001-9944(2017)08-0065-04
10.19557/j.cnki.1001-9944.2017.08.016
2017-03-07;
2017-05-18
徐高志(1988—),男,碩士,助理工程師,研究方向為水利水電自動化、水文自動測報、水文自動化;景波云(1981—),男,碩士,研發工程師,研究方向為水利水電自動化、水文自動測報、水文自動化。
猜你喜歡
水泵技術(2022年3期)2022-08-26 08:59:42
湖南水利水電(2021年6期)2022-01-18 06:07:40
黑龍江水利科技(2020年8期)2021-01-21 09:28:02
中華建設(2017年1期)2017-06-07 02:56:14
河南水利年鑒(2017年0期)2017-05-19 02:32:09
河南水利年鑒(2016年0期)2016-08-03 05:01:40
水利科技與經濟(2016年5期)2016-04-22 03:43:36
工程建設與設計(2016年1期)2016-02-27 10:50:17
河南水利年鑒(2015年0期)2015-08-16 04:25:49
水電站機電技術(2014年6期)2014-09-26 12:07:47
