基于全自動全站儀的基坑無線遠程自動化監測系統
2018-01-05 07:39:23秦永麟劉蘇
中華建設科技 2017年11期
秦永麟+劉蘇
【摘要】基于提升基坑監測作業效率、避免人為因素,本文采用基于全自動全站儀的基坑無線遠程自動化監測系統對工程進行監測,通過對系統數據的分析,驗證得到此系統極大的提高了工作效率,還可進行長周期、高頻率、多目標的監測,因此可以投入實際生產使用。
【關鍵詞】全自動全站儀;基坑;自動檢測系統
【Abstract】Based on improving the efficiency of foundation pit monitoring work and avoiding human factors, this paper uses a fully automated total station based pit wireless remote monitoring system to monitor the project. Through the analysis of the system data, this system has been verified to greatly improve the work Efficiency, but also for long-cycle, high frequency, multi-target monitoring, it can put into practical production and use.
【Key words】Automatic total station;Foundation pit;Automatic detection system
1. 引言
(1)由于建筑需要,基坑施工開挖越來越深,從最初的4~8米發展到現在的20多米,而傳統的基坑監測主要是在現場布置
一定的傳感器或儀器后,通過人工定時讀取數據,這樣是不能實時采集到數據,并且會延誤預警或是處治的最佳時間。
(2)因此,為提高效率,采用基于全自動全站儀的基坑無線遠程自動化監測系統,全自動全站儀是一種自動搜索、跟蹤、辨識和精確照準目標并獲取角度、距離、三維坐標以及影像等信息的智能型電子全站儀,可代替人工并進行連續監測,通過數據分析軟件處理,更加準確、有效地對基坑整體穩定性進行監測。
2. 系統原理
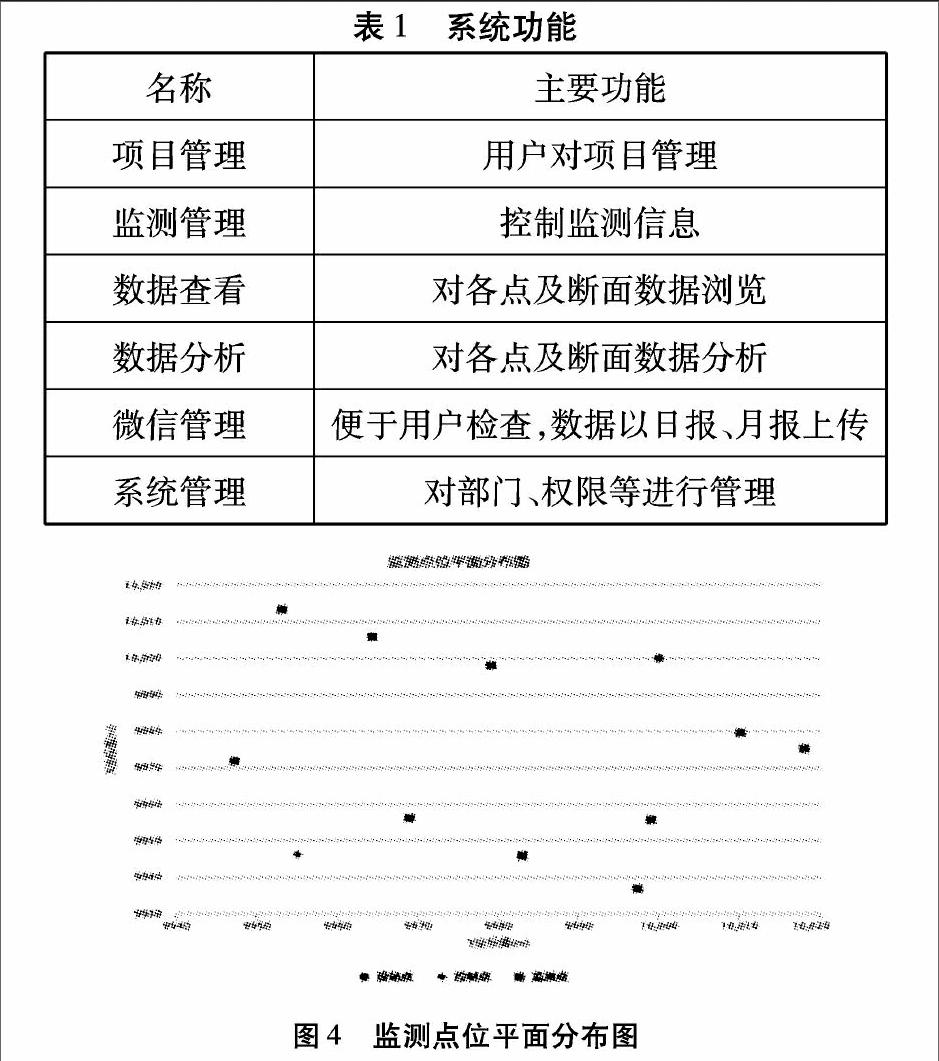
2.1系統功能(見表1)。
2.2工作原理(系統架構見圖1)
本系統通過無線傳輸模塊和數據采集器連接現場的各種傳感器,實現對基坑巖土體內部沉降、地表位移、傾斜、地下水位等一系列影響基坑安全穩定關鍵的參數進行連續監測。監測數據實時上傳至云計算平臺,由專用的計算機數據分析軟件處理,對基坑的整體穩定性做出判斷,快速做出基坑坍塌等災害發生的預警預報,更加準確、有效地監測災情發生,能夠對保障基坑結構運營安全起到至關重要的作用。
3. 工程應用
3.1項目概況。
本項目的依托某明挖隧道工程,對明挖隧道基坑段ZK1+478~YK2+780、YK1+595~YK2+850,進行了自動化監測系統的試點應用。項目路線主線采用雙向6車道,全長約2.3公里。
3.2監測點布置。
根據基坑具體情況,在基坑上布置7個監測斷面,每個監測斷面布置2個測點,在各監測點上安置小型棱鏡。考慮到全自動全站儀的測量精度和測量距離根據現場實際情況設置1~2臺自動全站儀,一般在基坑中部或者在基坑長度的1/4處和3/4處分別設置一臺全站儀保證監測范圍全覆蓋,同時,在遠離基坑(大于50米)的穩定處設置基準點(樁頂位移監測點的布置示意圖見圖2、監測點位三維分布圖見圖3、 監測點位平面分布圖見圖4)。
3.3監測數據分析。
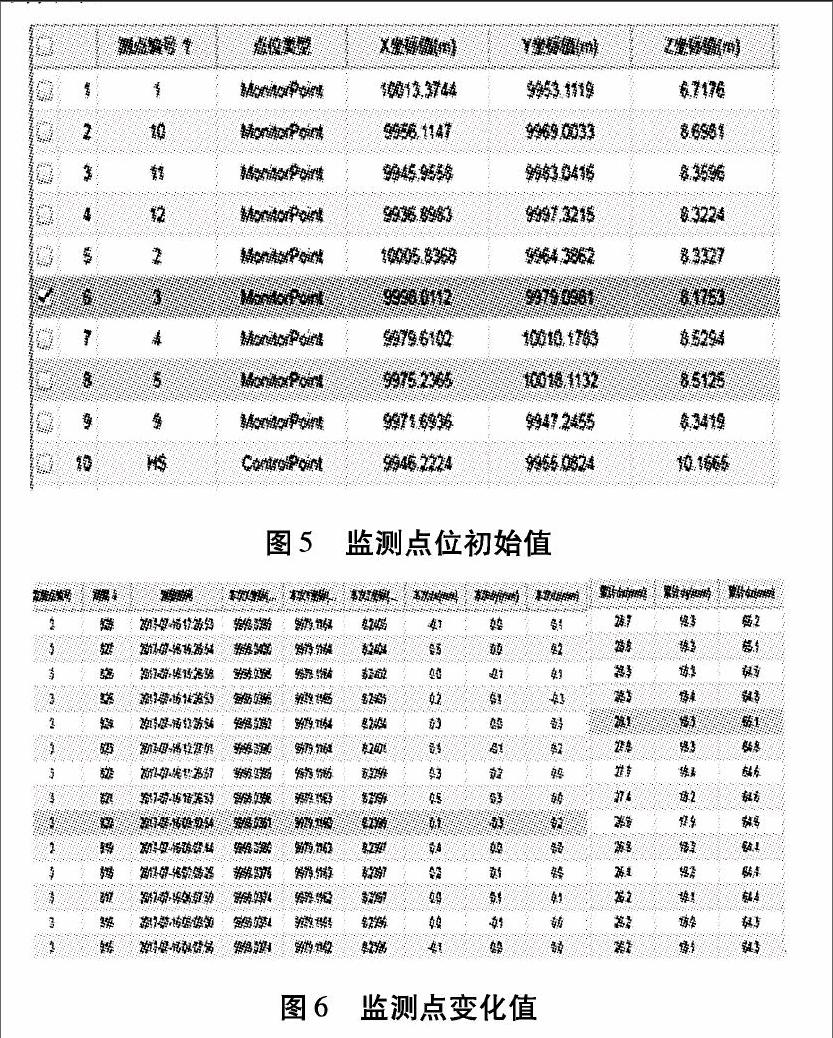
(1)監測點位初始值(部分),如圖5所示。
(2)監測點變化值(部分),如圖6所示。
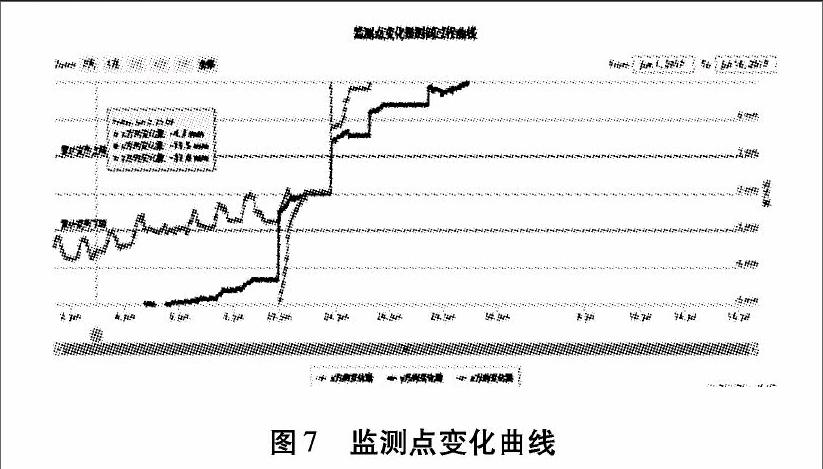
(3)監測點變化曲線(部分),如圖7所示。
從圖中可知,在全自動全站儀的基坑無線遠程自動化監測系統中可清晰獲取各監測點數據,對其進行分析(如圖7),系統快速繪制出變化曲線圖,將基坑真實情況更加直觀的呈現出來,保證了項目在基坑開挖及回填階段施工的基坑安全。
圖7監測點變化曲線
4. 結論
全自動全站儀相對于傳統的經緯儀、全站儀具有自動化的功能,可以快速識別并迅速作出分析,完全代替人工操作,避免因人為因素而產生的誤差;利用全自動全站儀的基坑無線遠程自動化監測系統,可對基坑項目進行長周期、高頻率、多目標的監測,可以極大的提高工作效率,本項目監測點較多,常規測量需要半天時間,而應用本系統,可以在15分鐘內完成,達到了省時省力的效果。
參考文獻
[1]惠理軍. 測量機器人在基坑監測項目中的應用[J]. 冶金叢刊, 2017(3):124~126.
[2]張君華, 馬波, 陳杰. 基坑變形的測量機器人自動監測系統開發與實現[J]. 礦山測量, 2016(1):30~32.
[3]張君華, 張宇琳, 許文濤. 基坑變形的測量機器人自動化監測研究及系統設計[J]. 測繪技術裝備, 2015, 17(1):91~93.
[4]高改萍, 李雙平, 蘇愛軍,等. 測量機器人變形監測自動化系統[J]. 人民長江, 2005, 36(3):63~65.endprint
