管道病害檢測技術(shù)調(diào)研報告
2018-01-06 12:58:57蔣益巧范臻
電腦知識與技術(shù) 2017年35期
蔣益巧+范臻
摘要: 20世紀(jì)70年代后,出現(xiàn)了多種管道病害檢測的技術(shù),避免了一些傳統(tǒng)管道檢測方法的局限性。然而直到目前,這些技術(shù)仍然各有優(yōu)點和不足。經(jīng)過調(diào)研,該文概括并比較了超聲反射單脈沖距離檢測法、多種傳感器的管道機(jī)器人控制、通過二維激光掃描獲得三維圖像的檢測法和基于主動式全景視覺傳感器的管道形變和內(nèi)部缺陷檢測等四種常見的管道病害檢測技術(shù)。我們發(fā)現(xiàn),在管道病害檢測方面,早先的超聲波、漏磁、渦流等手段存在效率低、不可視等諸多局限性。而隨著科技的發(fā)展,多傳感器、視頻法、三維重構(gòu)等方法將逐漸成為重要的檢測手段。然而這些檢測手段的傳統(tǒng)處理方法往往仍不能取得理想的效果,因此,在如何獲取和處理數(shù)據(jù)等方面都還需要不斷地探索和創(chuàng)新。
關(guān)鍵詞:管道;病害檢測;優(yōu)點;局限性;調(diào)研
中圖分類號:TP18 文獻(xiàn)標(biāo)識碼:A 文章編號:1009-3044(2017)35-0258-03
管道病害檢測,是指利用攜帶傳感器、在管道內(nèi)部行走的一體化系統(tǒng)來檢測管道內(nèi)部表面腐蝕、裂縫破損、淤泥堵塞、坍塌等病害的過程。該系統(tǒng)在工作人員或計算機(jī)的控制下,能夠進(jìn)行一系列檢測或者作業(yè)。
新中國成立以來,我國經(jīng)濟(jì)發(fā)展速度迅猛,管道的數(shù)量和空間日益復(fù)雜。因此傳統(tǒng)的管道檢測方法呈現(xiàn)出了很多局限性,已經(jīng)無法滿足現(xiàn)代管網(wǎng)檢測的要求。
從20世紀(jì)70年代開始,一系列的管道病害檢測方法開始出現(xiàn)。管道病害檢測的研究在德國和日本等國家開展得比較早、發(fā)展較快,并且代表著管道機(jī)器人的發(fā)展趨勢。
隨著科技的發(fā)展,尤其是電子計算機(jī)技術(shù)的應(yīng)用,城市地下管道的檢測出現(xiàn)了新的思路,病害檢測方法開始出現(xiàn)多元化、先進(jìn)化。
1 管道檢測技術(shù)的發(fā)展目的和現(xiàn)狀
管道在使用過程中,常由于腐蝕、壓力以及其他外力損傷等因素造成如表面腐蝕、裂縫破損、淤泥堵塞、塌陷、焊頭錯位等病害,因此需要定期檢查、清洗、維護(hù)以延長使用壽命,來預(yù)防安全事故。但傳統(tǒng)的檢測方法,即完全依靠人力的管道病害檢測,往往效率甚低,并且可能危害檢測工人的生命。
隨著科技發(fā)展,國內(nèi)外對于管道的表面腐蝕、裂縫破損、淤泥堵塞、坍塌等病害的檢測技術(shù),出現(xiàn)了利用超聲波、漏磁、渦流以及射線等信號的無損檢測法,以及近些年發(fā)展起來的利用光電技術(shù)的視覺檢測法。
在國內(nèi)較普遍使用的技術(shù)是讓工人用肉眼觀察機(jī)器人所攜帶的攝像頭在管道內(nèi)拍攝的圖像,但這種方法人工勞動強度較大、智能性不夠。而近年來國外市政管網(wǎng)維護(hù)和檢測的主要探測技術(shù),是一種采用機(jī)器人控制技術(shù)的產(chǎn)品。它可以探測管道內(nèi)部,也能夠提供具體的量化數(shù)據(jù),從而檢測和鑒定管道的病害情況。對于此類設(shè)備在我國起步較晚,又由于引進(jìn)設(shè)備價格昂貴,因此普及率不高。
基于管道出現(xiàn)病害的復(fù)雜性,檢測難度也在不斷加大等原因。如何替代人工繁瑣的檢測方式,設(shè)計管道機(jī)器人識別病害,并將病害信息傳送給主操作人員,同時提高檢測靈敏度,優(yōu)化無損檢測性能,成為當(dāng)今最大的難題。因此,自動識別檢測病害的管道機(jī)器人發(fā)展具有極大的實際應(yīng)用價值。
2 幾種管道病害檢測技術(shù)及其優(yōu)劣勢
(1) 超聲反射單脈沖距離檢測法
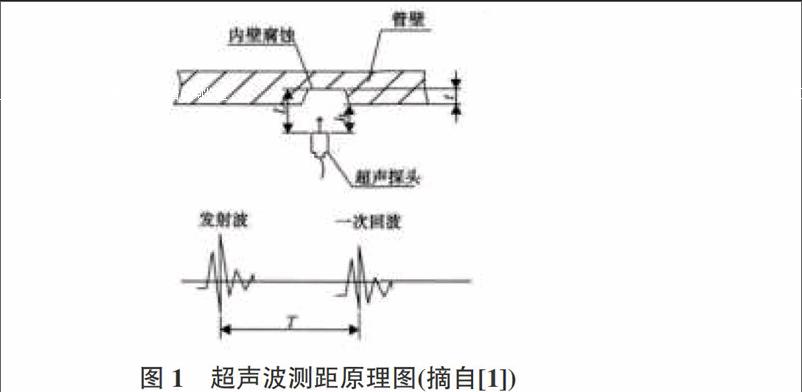
超聲波檢測法利用的是超聲波的脈沖反射原理。檢測時探頭向管道壁垂直發(fā)射超聲脈沖,探頭首先接收到反射自內(nèi)表面的脈沖,然后再接受到反射自的脈沖,這兩者之間的間距反映了壁厚(如圖1)。
通常,利用超聲反射單脈沖檢測法的機(jī)器人工作時,會對管道進(jìn)行全程的數(shù)據(jù)記錄,并根據(jù)測距數(shù)據(jù)確定缺陷深度;同時用相鄰傳感器和里程輪確定缺陷的走向、尺寸和缺陷在管道上的位置分布。
參考文獻(xiàn)[1]中所用的超聲波單脈沖檢測方案,檢測數(shù)據(jù)量小,其檢測靈敏度可達(dá)10mm×10mm×1mm(長×寬×深)的缺陷,并存在諸多優(yōu)勢:
① 適用于多種材料的檢測,對病害定位較準(zhǔn)確、檢測速度快、成本低、對人體無害;
② 探頭陣列方式使得檢測較為全面;
③ 降低了缺陷數(shù)據(jù)量,提高了缺陷檢測靈敏度,一定程度提高了檢測效率。
然而,同時也存在一定劣勢:
① 存在一定盲區(qū),對近表面缺陷和薄壁的管道并不適用;
② 對層疊、分層和裂紋的探傷分辨力高,而對單個氣孔的探傷分辨力則很低;
③ 缺陷回波與缺陷取向有關(guān),導(dǎo)致可能漏檢。
(2) 利用多種傳感器的管道機(jī)器人控制技術(shù)
多種傳感器的管道機(jī)器人,是指協(xié)調(diào)激光傳感器、傾角傳感器、攝像頭等各類傳感器,來進(jìn)行管道作業(yè)的一體化系統(tǒng)。
例如文獻(xiàn)[2]中提出的管道機(jī)器人,利用激光傳感器、傾角傳感器、CCD傳感器、電壓電流傳感、位移傳感器和旋轉(zhuǎn)編碼器等主要實現(xiàn)了如下功能:機(jī)器人把管道內(nèi)采集的視頻圖像實時傳回,以便現(xiàn)場工作人員根據(jù)實時信息對機(jī)器人各個系統(tǒng)部件進(jìn)行控制。
該管道機(jī)器人各個傳感器的功能如下:
激光傳感器為工作人員觀測到的裂縫破損位置進(jìn)行定位;通過起點和終點間旋轉(zhuǎn)編碼器測出的裂縫破損處轉(zhuǎn)過的弧度,和激光傳感器測出機(jī)器人到管壁的距離,可以大致得到管道裂縫的長度。
CCD攝像頭則負(fù)責(zé)有線傳輸圖像,使工作人員了解機(jī)器人的全局狀態(tài),以便進(jìn)行控制。
位移傳感器可以幫助運動定位,傳回的數(shù)據(jù)交給控制器分析,可完成小范圍的內(nèi)的自主控制,保證有效和流暢的運動。
另外,各類檢測傳感器則保護(hù)了整個系統(tǒng)的正常工作。例如,位于機(jī)器人底部的傾角傳感器幫助系統(tǒng)檢測了管道的埋設(shè)走向。
根據(jù)文獻(xiàn)[2]筆者的研究認(rèn)為,該種控制技術(shù)從與國外同類產(chǎn)品性能指標(biāo)的對比看,達(dá)到了同類產(chǎn)品國際先進(jìn)水平;其產(chǎn)品也在銷售中取得了客戶的認(rèn)可。
但這種依靠多個傳感器的傳統(tǒng)視頻法存在不足是:endprint
① 協(xié)調(diào)控制命令與運動的時間差,和機(jī)器人需要變化視角來拍攝的過程,導(dǎo)致機(jī)器人行進(jìn)速度緩慢;
② 對多傳感器的控制命令所需的時間難以估算,因此對同時到達(dá)的控制數(shù)據(jù)的處理還有待進(jìn)一步解決;
③ 此種設(shè)計仍然工作人員仍需要用肉眼來監(jiān)視和分辨,智能性不夠高。
此外,由于管道檢測機(jī)器人工作環(huán)境復(fù)雜,需要檢測的因素多,因此未來的設(shè)計也許還應(yīng)當(dāng)考慮到聲吶、氣體等更多傳感器的應(yīng)用;系統(tǒng)還應(yīng)增加用戶訪問權(quán)限控制,以提升系統(tǒng)的安全性。
(3) 通過二維激光掃描獲得三維圖像的檢測法
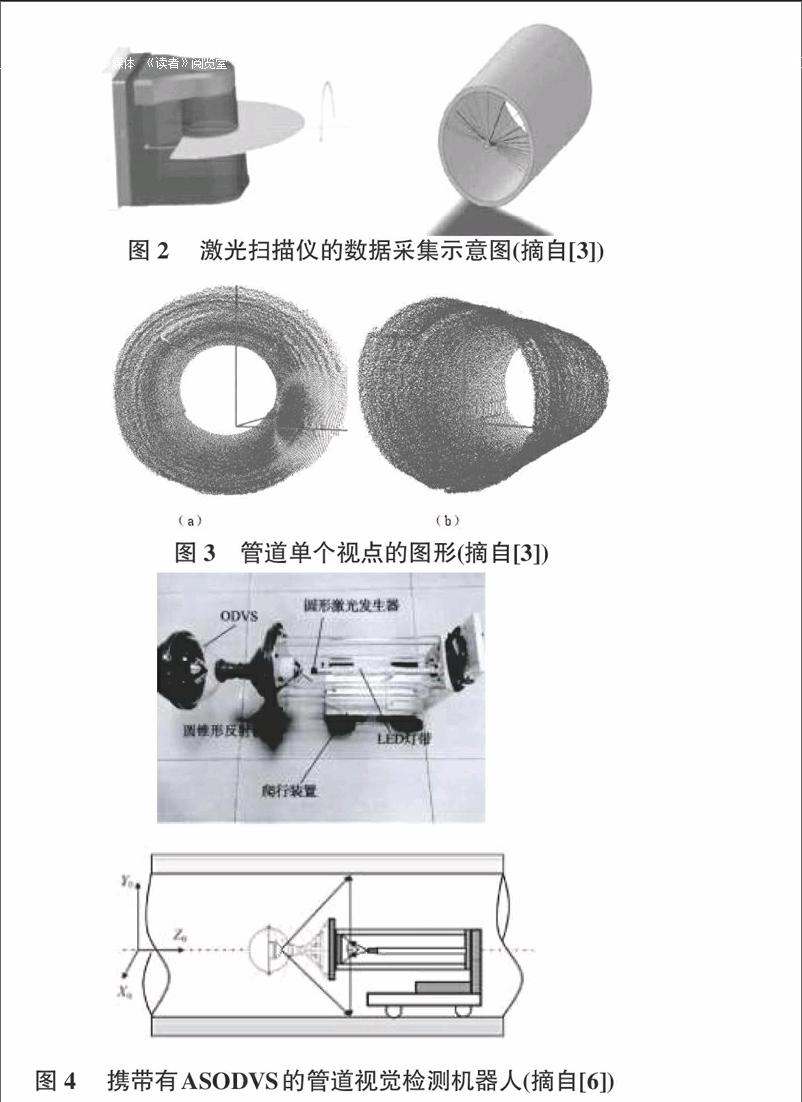
二維激光掃描儀可以根據(jù)激光在介質(zhì)中傳播的時間和速度,計算出每個激光直射點的位置。對掃描儀進(jìn)行旋轉(zhuǎn)采集物體表面的點云數(shù)據(jù),根據(jù)掃描到的數(shù)據(jù)和內(nèi)部傾角傳感器的傾角數(shù)據(jù),就可計算出點云中每一個點的坐標(biāo),獲得完整的三維曲面。
參考文獻(xiàn)[3]中便采用了二維激光掃描儀UBG-04LX-F01。如圖2所示為激光掃描儀對管道內(nèi)壁數(shù)據(jù)的采集示意圖。
研究者利用 ICP 算法對點云數(shù)據(jù)分段三維重建,并進(jìn)行了拼接匹配。如圖3所示為單個視點的管道的三維重建結(jié)果。圖中管道的裂痕可以被檢測到,因此用三維重建的方法對管道裂縫的檢測是有效的。
這種用三維重建進(jìn)行病害檢測的優(yōu)勢在于:
三維重建使得管道的真實形狀得以還原,可以通過放大、旋轉(zhuǎn)等方式對細(xì)節(jié)進(jìn)行檢測,發(fā)現(xiàn)更多的潛在危險。
但同時,這一方式還有值得提升的關(guān)鍵:
① 對于管道的建模分析技術(shù)和控制技術(shù)需要提升,以達(dá)到更實時、更精細(xì)的三維重建;
② 利用更多傳感器例如濕度、溫度傳感器能幫助系統(tǒng)獲得更多準(zhǔn)確的信息;
機(jī)器控制方面,要增加機(jī)器人側(cè)翻的一些措施。
(4) 基于主動式全景視覺傳感器的管道形變和內(nèi)部缺陷檢測、分類
上面談到,傳統(tǒng)的視頻法,即通過攝像機(jī)拍攝圖像的方法,存在一些不足:攝像頭需要不斷變化視角才能完成一個截面的拍攝;爬行器的行進(jìn)速度不宜超過0.2m/s;操作較為繁瑣,檢測耗時較長。
而全景成像技術(shù)的興起很好地提高了三維測量和場景重構(gòu)的效率。在基于全景成像的管道檢測方法中,一種基于圓結(jié)構(gòu)光視覺的技術(shù)可以有效地統(tǒng)籌激光器和攝像頭采集的數(shù)據(jù),根據(jù)數(shù)學(xué)模型得到管道內(nèi)壁的完整信息。
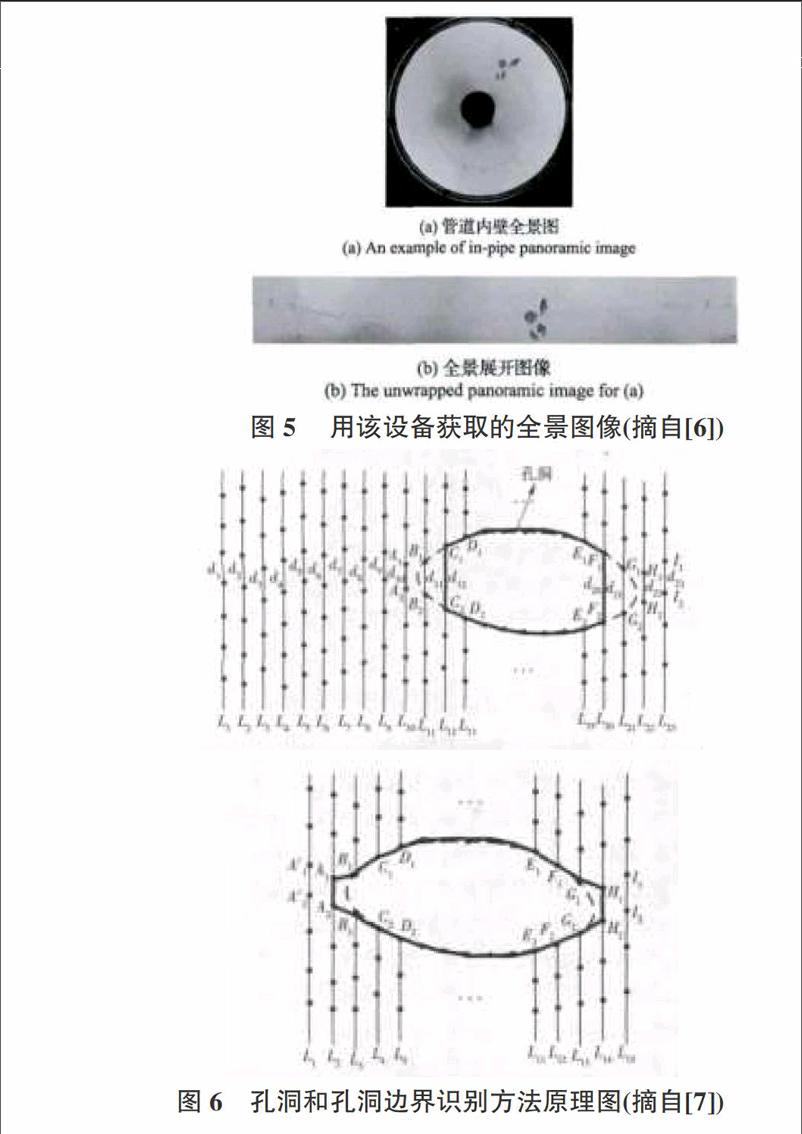
本方法源于文獻(xiàn)[6]的管道視覺檢測機(jī)器人,如圖4,其硬件核心ASODVS包括了單視點ODVS、全景激光發(fā)生器、照明LED。
利用單視點ODVS和照明LED可以獲取管道內(nèi)壁的全景圖像(圖5(a)),根據(jù)一定的數(shù)學(xué)模型展開后得到圖5(b)。利用一系列對比度提升、二值化等圖像處理手段,便能獲得更清晰的疑似管道內(nèi)部裂縫或腐蝕的邊緣。由于腐蝕和裂縫類缺陷相應(yīng)的幾何特征有較大的區(qū)別(比如腐蝕的圓形度較大,裂縫的圓形度趨于0等等),可以計算這些特征來對不同的缺陷進(jìn)行分類。
同時,此方法不僅可以檢測管道內(nèi)部的缺陷,也可用來可以檢測管道形變,并且進(jìn)行管道內(nèi)壁曲面三維重構(gòu)。在文獻(xiàn)[7]中,作者提出了根據(jù)管道壁上投射出的圓錐結(jié)構(gòu)光,獲得管道壁三維曲面的一種數(shù)學(xué)模型。
激光發(fā)生器在管道內(nèi)表面形成的明亮光條,是一個圓周形式的管道截面的三維數(shù)據(jù)。利用數(shù)學(xué)模型計算上述圓周的最小直徑,和管道的原有直徑相比較,便可判斷管道形變?nèi)毕菔欠翊嬖冢ň唧w計算方法見參考文獻(xiàn)[7])。
把上述得到的圓周分別展開為平面直線,并均勻地取數(shù)據(jù)點(如圖6)。那么,對于管道內(nèi)表面存在孔洞的位置,相鄰圓周線上相鄰點之間的距離di和di+1至少有一個大于所計算出的閾值(閾值根據(jù)具體計算方法見參考文獻(xiàn)[8])。據(jù)此可以判斷是否存在孔洞和判斷空洞邊界。
同時,把這些數(shù)據(jù)點用三角網(wǎng)格化的方法三角剖分(如圖7),并且按照上述孔洞邊界保留孔洞,每一個小三角形即為曲面上的一個三角面片。這樣,便可將空間點云數(shù)據(jù)以三維的形式加以重構(gòu),完成三維顯示(效果如圖8)。
經(jīng)過原文[6][7][8]中幾位作者的實驗表明,此種基于主動式全景視覺傳感器的方法從精度和效率綜合的因素考慮,既對管道內(nèi)壁增加了可視性,又減輕了人工判斷的壓力,具有一定的優(yōu)越性。用管道內(nèi)壁全景圖像來檢測管道內(nèi)部缺陷的方法較統(tǒng)計學(xué)方法而言檢測精度有所提升,較基于BP神經(jīng)網(wǎng)絡(luò)的檢測方法運算復(fù)雜度降低了許多。而用激光掃描全景圖來構(gòu)造網(wǎng)格的方法簡潔快速,大大提高了網(wǎng)格的重構(gòu)速率,對于表面曲率變化不是十分劇烈的管道有較好的重構(gòu)效果。
3 總結(jié)和展望
本文由于筆者時間和精力有限,只大體地調(diào)研了目前管道病害檢測相關(guān)技術(shù)手段的主要原理,而對于整個管道機(jī)器人的層次結(jié)構(gòu)、通訊機(jī)制和軟硬件的設(shè)計等細(xì)節(jié)方面沒有進(jìn)行具體的描述。
經(jīng)過調(diào)研,我們發(fā)現(xiàn),在管道病害檢測方面,早先的超聲波、漏磁、渦流等手段存在效率低、不可視等局限性。而隨著科技的發(fā)展,多傳感器、視頻法、三維重構(gòu)等方法將逐漸成為重要的檢測手段。這些檢測手段的對所得數(shù)據(jù)的傳統(tǒng)處理方法也許并不能取得理想的效果,因此,在如何獲取和處理數(shù)據(jù)等方面都還需要不斷地探索和創(chuàng)新。
文中所提到的檢測手段的實現(xiàn)得益于眾多學(xué)者研究出的成果,但為了更高的檢測精度和準(zhǔn)確率,這些方法都還有許多可調(diào)整的空間,比如機(jī)器人的位姿、所得數(shù)據(jù)與機(jī)器人運動參數(shù)的歸一化、快速篩選缺陷、定量顯示缺陷的面積、深度等信息、明確缺陷量化指標(biāo)及危害程度等等。并且,今后還可根據(jù)缺陷的種類和程度給出相關(guān)的維護(hù)建議。
參考文獻(xiàn):
[1] 唐東林,袁曉紅,趙江,等.管道內(nèi)腐蝕缺陷超聲在線檢測機(jī)器人設(shè)計[J].測控技術(shù),2015,34(7):117-119.
[2] 胡仁昱. 地下管道檢測機(jī)器人控制技術(shù)研究與開發(fā)[D].上海: 復(fù)旦大學(xué), 2011.
[3] 蔡輝. 排水管道檢測機(jī)器人的設(shè)計及應(yīng)用[D]. 湖南大學(xué), 2012.
[4] Trickey, S. A. “Three-dimensional finite element modeling of Buried pipes including frost action.” MSc thesis, Dept. of Civil Engineering, Queens Univ. at Kingston, Canada
[5] 張學(xué)昌, 高學(xué)敏, 邵建敏, 等. 基于三坐標(biāo)測量儀的雙目視覺測量方案及其數(shù)據(jù)分析[J]. 工具技術(shù), 2004, 38(6):65-67.
[6] 吳挺, 魯少輝, 韓旺明, 等. 基于主動式全景視覺傳感器的管道內(nèi)部缺陷檢測方法[J]. 儀器儀表學(xué)報, 2015, 36(10):2258-2264.
[7] 魯少輝, 吳挺, 湯一平, 等. 基于主動式全景視覺的管道形變檢測及重構(gòu)技術(shù)的研究[J]. 光電子· 激光, 2015, 7: 013.
[8] 張艷輝, 金翠云, 王穎. 基于圓結(jié)構(gòu)光視覺三維點的孔洞缺陷識別及重構(gòu)[J]. 北京化工大學(xué)學(xué)報, 2012, 39(5):113-117.endprint
