基于單片機的高爾夫運動訓練系統設計
2018-01-08 22:08:56趙高鵬王向民
電子設計工程 2017年16期
陳 杰,趙高鵬,王向民
(南京理工大學 江蘇 南京210094)
基于單片機的高爾夫運動訓練系統設計
陳 杰,趙高鵬,王向民
(南京理工大學 江蘇 南京210094)
為了測試準確獲取高爾夫球員擊球時的桿頭偏角與桿頭速度,提出了一種以STC12LE2052單片機為核心的高爾夫訓練系統,該系統采用光電傳感器采集數據,通過藍牙模塊將數據發送給上位機或者手機等終端設備。文章首先對系統工作原理進行分析,其次對系統的硬件和軟件進行了分析,最終通過實際測試表明,本系統精度高,可靠性強。另外,本系統還具有小巧靈活,使用簡單,且成本低的優點。
高爾夫訓練系統;STC12LE2052單片機;光電傳感器;藍牙模塊
隨著高爾夫球運動的普及與推廣,高爾夫教學和高爾夫練習方法得到眾多教練與學員的關注。目前的高爾夫訓練主要是針對揮桿動作和揮桿力量進行訓練,而高爾夫運動員在做揮桿訓練時,其揮桿擊球瞬時的桿頭偏角及桿頭速度決定了高爾夫球飛行的方向和距離,它們是評價運動員揮桿擊球動作和揮桿力量的兩個關鍵性指標[1-3]。目前,對于桿頭偏角和桿頭速度測量的方法主要有圖像分析和相控雷達檢測等,圖像分析方法是通過高速攝像機抓取擊球瞬時的圖片,進過圖像處理技術來獲取,其檢測精度受到圖像質量的約束[4-5];相控雷達檢測設備,如目前世界上最先進的高爾夫雷達監測設備TrackMan等,雖然精度高,但只適用于大揮桿動作,對于推桿動作,由于高爾夫球始終在地面滾動,受到球桿的遮擋等影響,無法進行檢測,且這兩種方法對設備要求比較高,價格昂貴,不利于推廣[6-7]。文中提出了一種以STC12LE2052單片機為核心的高爾夫訓練系統,該系統小巧靈活,使用簡單,且具備較高的精度。
1 方案設計
1.1 系統架構
本系統主要由單片機、電源模塊、光電傳感器模塊、232串口模塊以及藍牙模塊組成。如圖1所示。
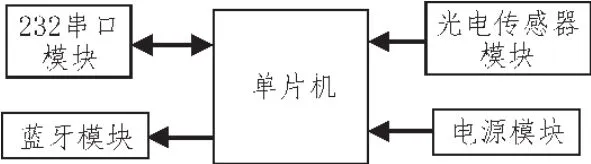
圖1 系統結構框圖
其中,232串口模塊主要用來調試和燒寫程序之用;藍牙模塊用來實現數據的無線傳輸,將數據傳給上位機進行相應的處理分析,同時可以將數據傳到訓練者手機上,訓練者可以更方便的查看自己的揮桿擊球數據;光電傳感器模塊就是采用8個光電開關產生8束光束,本方案采用對射型光電開關,這種傳感器作用距離大,靈敏度高,抗干擾能力強;電源模塊,給整個系統供電。
1.2 系統的基本原理

圖2 桿頭數據檢測原理圖
檢測設備的功能就是獲取訓練者擊球時刻的桿頭速度以及擊球角度,如圖2所示,該裝置設置8束光電光束分別為A,B,C,D,E,F,G,H,圖中 L 為桿頭的橫截面,由于球員揮桿擊球的瞬間很難做到絕對水平擊球,即一定存在一個擊球角度ɑ,也就是球桿桿頭遮擋光束點A和B的時間是不同的,存在一個時間差,同時因為A,C或B,D之間的距離很小,桿頭在A,C或B,D之間可以近似認為是勻速運動,根據桿頭遮擋A,C和B,D之間的時間差可以計算出此時的桿頭速度,這樣就可以根據等效三角形原理計算出擊球時刻的桿頭角度了。
高爾夫下桿擊球速度為:

擊球角度分別為:

8個光束按揮桿前后時間可以分為兩部分:A,B,C,D為揮桿前,利用該4束光束可以計算出擊球前的桿頭角度,同時根據計算出的兩個角度ɑ和β可以得到擊球前的桿頭角度變化趨勢,這樣可以更充分的看出球員擊球前的揮桿變化;另外4個光束E,F,G,H用來測量球員擊球后的桿頭數據,計算原理和前面的一樣。根據擊球前后的桿頭數據,不僅可以知道球員擊球瞬間的桿頭變化,同時也可以得到速度的轉化效率。
1.3 器件選擇
文中所要實現的功能是采集桿頭遮擋激光束的時間,由于桿頭遮擋到兩光束之間的時間差都是毫秒級的,另外我們最終需要的參與計算的參數是時間差,器件的響應時間并不會影響到計算的精度,所以采用1T的8位51單片機STC12LE2052,它是高速、低功耗的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8~12倍,完全可滿足設備的要求[8-9]。光電傳感器的選擇主要從功耗和作用距離以及靈敏度方面考慮,最終本文選用一款對射型激光發射接受管,其功耗低,激光管功率只有5 mW,而且接收管的接收面很小,這樣可以提高設備精度[10-12];另外,藍牙模塊選擇CC2540射頻芯片,其具有低功耗、高靈敏度、抗干擾能力強,外接電路簡單等優勢[13-15]。
2 設計實現
2.1 主要電路設計
2.1.1 發射調制和接收采集電路
如圖3所示,發射的激光信號經過調制變成調制光,這樣可以大大地提高傳感器的抗干擾能力,消除了外界光源對傳感器地干擾。接收管在照射到調制光時會使電平拉低,當光源被遮擋,引腳2的電平會升為高電平,當再次照射到光源時,通過J1連接的外部中斷會得到一個下降沿信號從而產生中斷,表示光源信號經過一次遮擋。
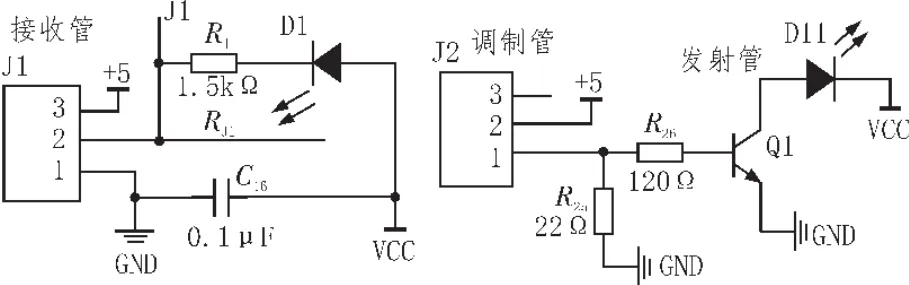
圖3 發射和接收電路
2.1.2 電源模塊電路
電源部分,本文采用充電電池給設備供電,本設備需要5 V和3.3 V兩種電壓。并且充電電池的電壓并不能一直穩定在3.3 V左右,所以在電源設計上首先采用LT1930A從3.3 V升壓到5 V,給激光接收管供電,然后通過LM1117-3.3將電壓降到3.3 V供其他芯片使用。具體電路如圖4所示。
2.1.3 藍牙模塊電路
藍牙模塊以CC2540射頻芯片為核心,CC2540與藍牙低功耗協議棧共同構成高性價比、低功耗的片上系統解決方案,非常適合藍牙低功耗應用。其外圍電路簡單,外接若干個阻容器件構成的濾波電路和PCB天線即可實現無線網絡節點的構建。CC2540最小系統主要由32 MHz晶振、32.768 kHz睡眠晶振、復位電路、3.3 V電源及去耦電容、射頻阻抗匹配電路及單極性PCB天線組成。其外圍電路如圖5所示,其中ANT接PCB天線,TXD和RXD分別接51單片機的RXD和TXD。
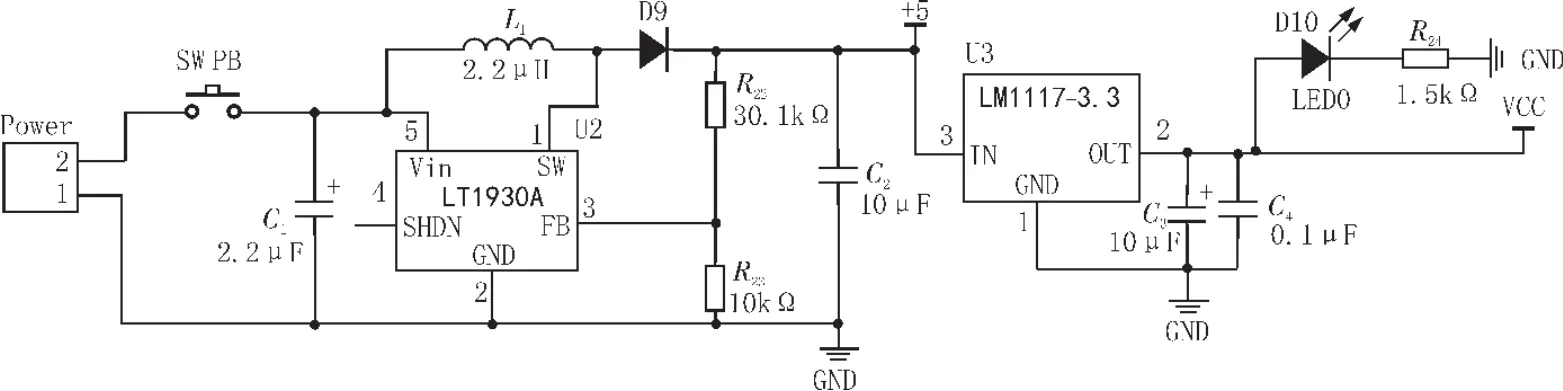
圖4 電源模塊電路
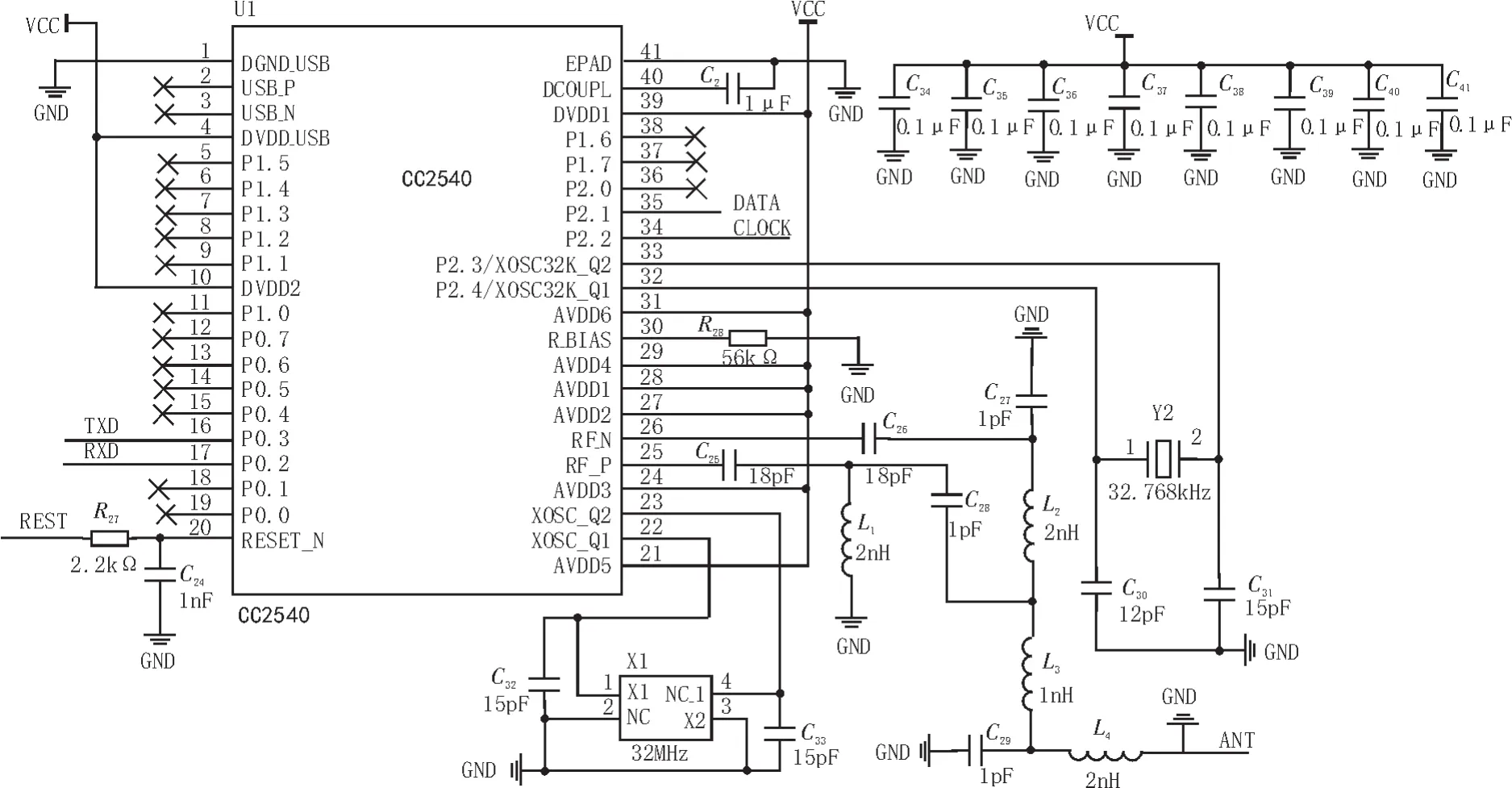
圖5 藍牙模塊電路
2.2 系統的軟件設計
本設備要實現的功能是通過光電傳感器采集擊球時的桿頭數據,然后將數據打包發送到上位機處理,所以軟件設計的重點是如何精準的采集到桿頭遮擋光束的時間數據。由于高爾夫球員在揮桿前需要先瞄準擊球點,在瞄準的過程中桿頭必然會遮擋擊球前的4點光束,而這時并沒有擊球,所以要求單片機忽略掉此時遮擋的時間數據,鑒于此我們采用外部中斷的方式來采集遮擋時間數據。由于STC12LE2052的外部中斷只有5個,對于8個光束來說就需要采用中斷加掃描I/O口電平的方式來采集數據。具體流程如圖6流程圖所示。
在中斷服務程序中,首先根據相應的I/O口電平判斷具體是哪個接收管被遮擋觸發中斷,然后讀取產生中斷的接收管的光源遮擋時間,并置遮擋標志位為1。不過在球員擊球時,高爾夫球有可能會遮擋到后4個光束。如果不做處理單片機會誤以為這是桿頭掃過時產生的遮擋,這樣就會發送錯誤的時間數據。經過實驗,我們發現在球員擊出球后,在很短的時間后桿頭也會掃過后面的4束光束。所以我們可以設定一個時間閾值,在桿頭掃過前4個光束后,延時一段時間,當到達設定閾值后,再發送所有時間數據。這時,存儲最后4個光束時間數據的數組會被最后一次桿頭掃過時的時間數據更新,具體流程如圖7所示。
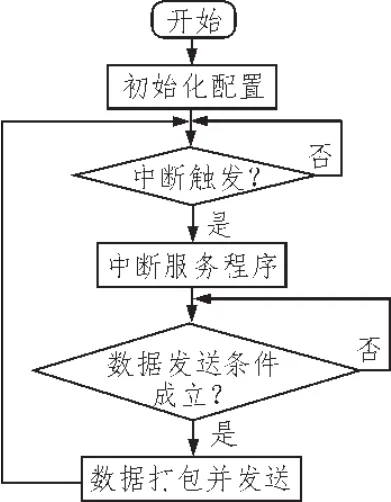
圖6 系統主程序流程圖
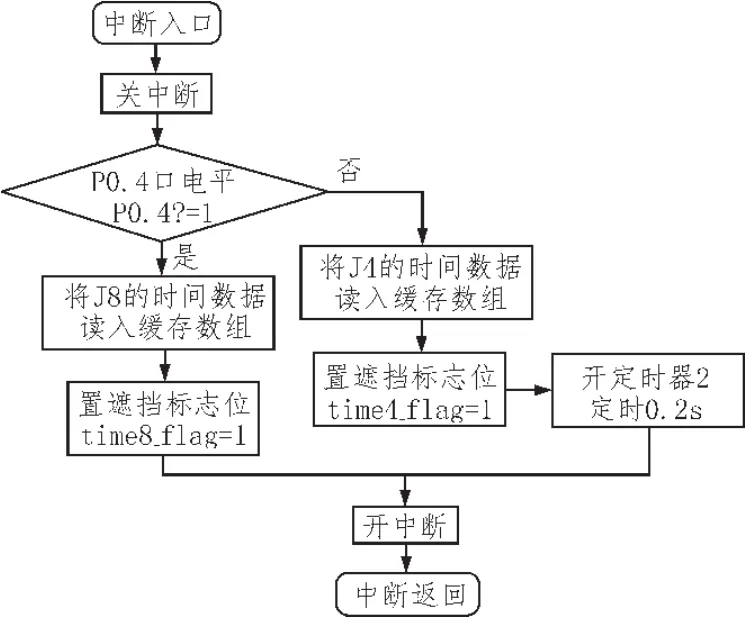
圖7 中斷服務程序流程圖
2.3 系統的精度分析
系統的精度主要受到下列因素的影響:首先是傳感器的響應時間的不同,會給遮擋時間的記錄帶來誤差;其次,光電傳感器的感應面積是一個帶狀的區域,光線可能并不是垂直照射到接收管,這樣可能造成最后兩個光束之間的感應距離并不是其真實距離;最后,球員揮桿擊球的過程并不是一個勻速運動的過程,鑒于間距小本文近似看成是勻速運動,這也會給計算帶來誤差。
其中,第三個因素由于簡便處理這樣的誤差是客觀存在的,而距離誤差我們可以在調試過程中盡量做到光線垂直照射到接收管上。而對于光電傳感器的響應時間,在我們的實際測量中得到了圖8的結果:
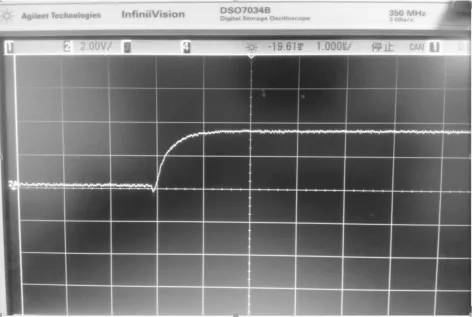
圖8 光電傳感器響應波形
由上圖8可以發現,光電傳感器的響應時間很短,在1~2 μs之間。這對于兩個光束間毫秒級的時間間隔來說基本可以忽略;另外,本文對于角度與速度的計算是采用兩點間的時間差作為基本數據的,而每一個傳感器的響應時間基本都相同都在1~2 μs之間,所以這樣的誤差對于最后的計算的影響基本可以忽略。
3 系統測試
最終系統的測試,我們將上位機所得到的數據和用雷達方案的TrackMan的數據進行對比(TrackMan是一家將軍用雷達科技轉化到民用體育領域的公司,他們的測量精度在速度上可以達到+/-0.045 m/s,而角度偏差可以控制在 +/-0.5 度),本文經過對比測試得到了以下的測試結果。
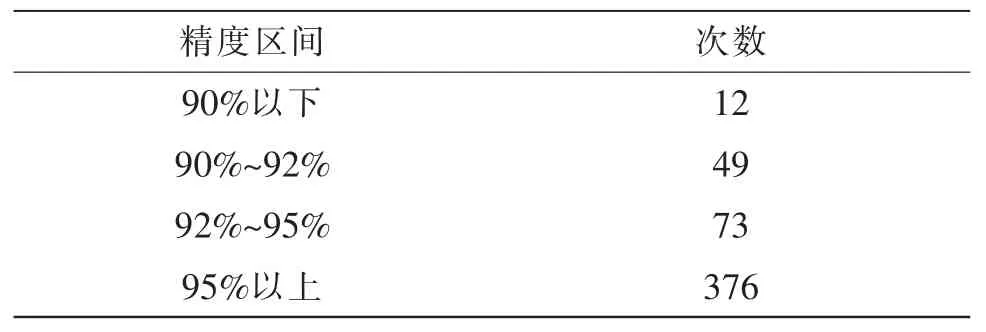
表1 擊球速度的精度統計表
通過表1的統計對比可以發現,在擊球速度的測量上,本文的方案的精度絕大多數可以控制在92%以上。
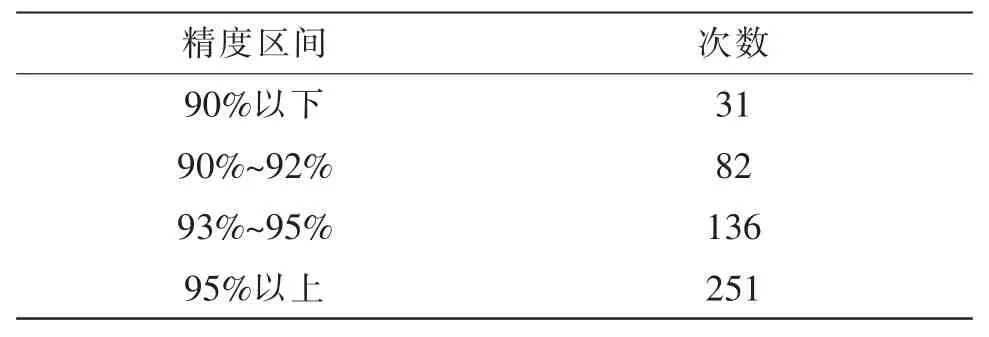
表2 擊球角度的精度統計表
從表2可以看出,對于擊球角度的測量,本方案的精度保持在93%以上的也占了大多數,說明本方案可靠性較高。
4 結束語
文中提出了以光電傳感器作為數據采集核心,一改以往采用雷達和圖像的揮桿結果采集方案,極大的降低了高爾夫采集器的成本和計算的復雜度,同時在精度上的表現也可以滿足日常訓練的要求。
不過由于種種原因,本文也有一些不足之處。首先本文對于擊球角度的測量只能針對于水平方向上的偏角,而對于豎直方向上的角度就不適用,后續工作可能需要加上雷達或者圖像的方法作為輔助來獲取豎直方向上的擊球角度;其次,本文在計算過程中,處于簡便考慮將很短距離內的桿頭運動簡化成勻速運動,這給計算帶來了一定的誤差,在下一步的工作中需要對桿頭的運動過程進行建模,從而可以獲得更準確的時間數據。
[1]張紅彬.高爾夫球運動參數測量系統的研究[D].北京郵電大學,2014.
[2]Guo Hualing,Deng Jiahao,Cai Kerong.Highspeed Moving Target Recognition Technology Based on Multi-sensor Data Fusion[C]//IEEE International Forum on Information Technology and Applications,2010.
[3]Jiann-JyhWang,Pei-Feng Yang,Wei-Hua Ho,et al.Determine an effective golf swing by swing speed and impact precision tests[J].Journal of Sport and Health Science.2015,3:209,244-249.
[4]劉星彤.基于圖像識別技術的高爾夫揮桿動作分析儀的研制[D].沈陽:東北大學,2011.
[5]謝蕾.基于目標跟蹤算法的高爾夫揮桿分析系統研制[D].北京:北京郵電大學,2015.
[6]林仲揚.漫談雷達測速[J].國外電子元器件,2006(10):71-73.
[7]張翔宇.雷達近距離探測與跟蹤技術研究[D].北京:北京郵電大學,2015.
[8]史小楠.STC12C5410/12C2052系列 單片機簡介[J].電子制作,2007(1):24-25.
[9]謝紹霞,郭三華,曹麗娟,等.基于單片機STC12C5A60S2與無線模塊CC1101的電動溫控閥控制器設計[J].電子設計工程,2016(13):104-106.
[10]李俊斌,胡永忠.基于CC2530的ZigBee通信網絡的應用設計[J].電子設計工程,2011(16):108-111.
[11]朱宇,李靜,岳勇.基于藍牙4.0的設備通信方案設計與實現[J].電子設計工程,2014(19):150-152,155.
[12]徐金茍.低能耗藍牙4.0協議原理與實現方法[J].微型電腦應用,2012(10):16-19.
[13]孫杰,潘繼飛.高精度時間間隔測量方法綜述[J].計算機測量與控制,2007(2):145-148.
[14]尚君瑩,田學民,陳潔萌.脈沖激光測距系統及其算法研究[J].電子設計工程,2015(11):99-101.
[15]吳慶生.基于時差法的激光測距方法與應用[D].大慶:東北石油大學,2014.
Golf training system based on 51 MCU
CHEN Jie,ZHAO Gao-peng,WANG Xiang-min
(Nanjing University of Science and Technology,Nanjing 210094,China)
In order to test for golfers'swing speed and hit precision,a golf training system with singlechip microcomputer STC12LE2052 as the core is proposed.The system collect data through the photoelectric sensor,then the collected data is transmitted by Bluetooth module to the terminal equipment such as PC and cellphone.In this paper,the working principle of the system is analyzed,then the hardware and software of the system are designed and analyzed,finally the experimental results show that the system is reliability and high accuracy.What's more ,the system is flexible,simple to use,and have low cost.
golf training system;MCU STC12LE2052;photoelectric sensor;bluetooth module
TN99
A
1674-6236(2017)16-0125-04
2016-08-09稿件編號:201608072
上海航天科技創新基金項目(1151241057)
陳 杰(1991—),男,安徽合肥人,碩士研究生。研究方向:嵌入式系統,圖像與視頻處理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45