一種粗-精結合的航天偵察航跡關聯算法
2018-01-09 00:43:14尉強,劉忠
雷達科學與技術 2017年1期
尉 強,劉 忠
(1.海軍工程大學電子工程學院,湖北武漢430033;2.空軍預警學院,湖北武漢430019)
一種粗-精結合的航天偵察航跡關聯算法
尉 強1,2,劉 忠1
(1.海軍工程大學電子工程學院,湖北武漢430033;2.空軍預警學院,湖北武漢430019)
航天偵察中光學成像偵察能夠獲得精確的目標方位信息,而電子偵察能夠獲得準確的目標屬性特征,為綜合利用二者的特性來對航跡進行關聯,提出一種基于粗-精結合的航跡關聯算法。該算法通過方位信息對目標航跡進行粗關聯,通過多維屬性信息對目標進行精關聯,最終得到航跡關聯結果。分析了航天偵察傳感器的時空對準方法,給出了多因素模糊綜合決策航跡關聯的具體步驟,并通過仿真實驗對算法性能進行了驗證。結果表明,提出的算法能夠較好地解決航天偵察手段的航跡關聯問題,與JPDA方法相比,該方法具有較高的關聯正確率。
航天偵察;航跡關聯;模糊綜合決策;粗關聯;精關聯
0 引言
航天偵察是當今最先進、最有效的信息獲取手段,可對全球實施偵察監視,具有不受國界限制、周期性區域覆蓋、偵察領域廣闊等其他偵察手段無法比擬的巨大優勢[1]。其中,星載光學成像偵察和電子偵察是應用比較廣泛的兩種偵察手段。但這兩種偵察手段的監視范圍、定位方式及定位精度存在很大的差異。光學成像偵察的目標定位精度一般在百米至公里量級,電子偵察獲取的目標定位精度一般在公里至幾十公里級,瞬時監視范圍一般在數百至數千平方公里。因此將它們的數據關聯融合后可以顯著提高定位精度。此外,電子偵察刻畫的是目標配屬的輻射源特征,偵察數據經過處理,獲得輻射源參數后,在有關情報的支持下,可以較為準確地判定輻射源類型及型號;而成像偵察的目標識別能力直接與分辨率有關,在較低圖像分辨率情況下,只能判定目標粗的類別歸屬[2]。這兩種偵察手段能從不同角度在不同層次獲取目標信息,可相互進行引導,將兩者結合,可以顯著提高目標情報質量。
要將兩種傳感器獲取的目標信息有機結合起來,首先要解決的問題是目標航跡的關聯。由于成像偵察和電子偵察衛星使用的傳感器類型不同,在系統誤差、定位精度上存在較大的差異,這給它們的航跡關聯帶來了困難。傳統的航跡關聯算法,一般都是基于它們共同子空間方位角的,但是由于方位角測量精度不同,有時會存在較大偏差,僅僅利用一維方位信息很難達到較高的關聯正確率[1-4]。成像偵察和電子偵察衛星還能獲得目標的屬性信息,但由于獲取情報的局限性,一般不易完全掌握目標的電磁特征,這使得在目標判定上存在一定的模糊性,本文充分利用此特點,研究了粗精結合的多因素模糊綜合決策的航跡相關模型,該模型綜合考慮了兩類傳感器的方位信息和多維屬性信息,實驗證明,該方法能達到較高的關聯正確率。
1 傳感器航跡的時空對準
由于成像偵察衛星和電子偵察衛星的探測周期不同、目標與不同傳感器相對位置不同等,使得星載傳感器的目標探測數據不是在同一時刻得到的,即存在著探測數據的時間差異,不同的傳感器工作在各自的平臺上,采用不同的坐標系。因此,對星載傳感器進行航跡相關判定前,需要進行時間對準和空間對準,將各傳感器不同步不同坐標系下的方位信息同步到同一基準時標和相同的參考坐標系下[5]。
1.1 時間對準
在進行時間對準時,將傳感器數據統一到探測周期較長的傳感器的航跡數據時標上,在實際的海戰場多傳感器數據融合工程實踐中,通常電子偵察衛星傳感器的數據采集率高于成像偵察衛星,且具有較高的對目標方位信息的探測精度,因此按成像偵察衛星傳感器航跡的時間進行對準[3]。常用的時間對準的方法有外推或內插,通過外推、內插方法解決成像偵察衛星傳感器探測到的量測值較少的問題。
常用的純方位插值算法有勻角速度算法、勻角加速度算法、恒定角速變化率算法、三次樣條插值算法、拉格朗日插值算法、最小二乘算法等[6]。綜合考慮算法性能和計算復雜度,本文采用三次樣條差值進行時間配準。
設θ(t1),θ(t2),…,θ(t n-1),θ(t n)為傳感器在時刻(t1,t2,…,t n-1,t n)測得的目標方位,令

且θ(t)是[t i-1,t i]上的三次多項式,那么θ(t)的二階導數θ″(t)可表示為

式中,h i=t i-t i-1。
由條件θ(t i-1)=y i-1,θ(t i)=y i,即可得積分常數為

其中,M i由以下矩陣確定:
1.2 空間對準
在星載傳感器融合系統中,由于星載傳感器都是純方位傳感器的航跡,因此,在進行空間對準時,將它們統一轉換到統一平臺的坐標系即可。
為了實現空間對準,將多傳感器獲得的目標量測數據發送到融合中心,通過融合中心處理后轉換成統一坐標系數據,再進行跟蹤濾波,航跡關聯。星載傳感器目標航跡關聯與仿真分析中常用的幾種坐標系為地心直角坐標系(ECF)、地心慣性坐標系(ECI)[7]。
1)地心直角坐標系O-X EY EZ E
地心直角坐標系(ECF)是隨地球自轉而變化的坐標系,如圖1所示,O為地心,X EOY E為赤道面,Z E軸垂直于X E OY E,X E軸為地球的自轉軸,Z E指向北極,Y E在赤道面內,與X E軸、Z E軸構成右手直角坐標系。
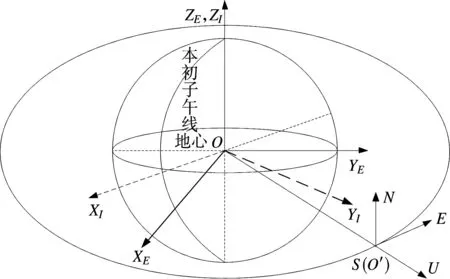
圖1 ECF坐標系
2)地心慣性坐標系O-X IY IZ I
地心慣性坐標系(ECI)與慣性空間固連。如圖1所示,O為地心,平面X IOY I以及Z I軸與ECF坐標系重合,X I軸指向春分點的方向,Y I軸與X I,Z I軸構成右手直角坐標系。
3)地心慣性坐標系與地心直角坐標系之間的轉換
設目標在t時刻的位置量測信息在ECF坐標系、ECI坐標系中分別為


2 航天偵察航跡關聯算法
2.1 基于方位角的粗關聯
設海面艦船目標的動態模型[8]為

式中,X(k)為狀態向量,Φ為狀態轉移矩陣,G(k)為過程噪聲分布矩陣,V(k)為過程噪聲。假定V(k)是零均值的高斯白噪聲。
傳感器s的測量模型為

式中,W s(k)為零均值的協方差矩陣R s(k)高斯白噪聲,即測量噪聲。
令s=1時為成像偵察衛星傳感器,s=2時為電子偵察衛星傳感器。成像偵察衛星傳感器的量測值為目標的方位角和距離,即Z1(k)=[θ(k),r(k)],電子偵察衛星的輸出為目標的方位角和俯仰角,即Z2(k)=[θ(k),Φ(k)],它們共同的子空間為角度,其中方位角的量測模型為

式中,θs(k)為目標方位角的量測值,為目標方位角的估計值,nθs(k)為均值為零、方差為的高斯白噪聲。
由于本文主要討論的是星載傳感器的航跡關聯算法,因此假定在航跡關聯前,傳感器已經完成了跟蹤、時空配準,且來自同一傳感器的不同目標的信息互不相關。設

由于衛星的位置量測信息只有角度信息,所以使用角度信息粗關聯。為了簡單起見,只使用方位角信息,即采用方位角差值的絕對值,共采樣T個時刻,并進行平均:
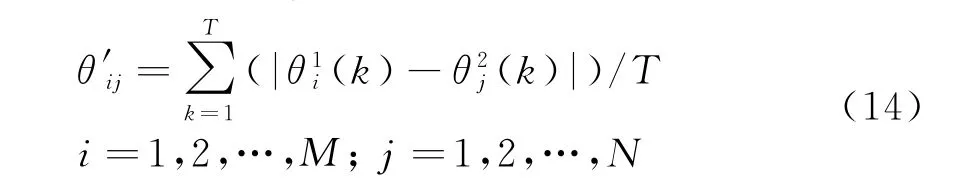
滿足角度測量平均差值小于2個觀測值偏差之和的航跡對是可能關聯的,即滿足

2.2 基于多因素模糊綜合決策的精關聯
1)建立模糊因素集
模糊因素集的一般形式:U={u1,u2,…,u n},n為模糊因素個數。在兩種傳感器特性的基礎上,由于從成像偵察和電子偵察中只能得到角度信息,除此之外,由于兩種傳感器都具有一定的識別功能,則可獲得相同的屬性信息,即目標身份信息[8-17]。所以可使用目標位置信息和屬性信息定義模糊因素集。設模糊因素集為U={u1=目標角度相似度的模糊因子,u2=目標身份可信度的模糊因子},則k時刻模糊因素的具體形式[8-11]如下:
① 目標角度相似度的模糊因子。設T1=(1,2,…,n1),T2=(1,2,…,n2)為電子偵察和成像偵察這兩個傳感器粗關聯后產生的所有航跡的集合,i,j為航跡編號且i∈T1,j∈T2。θi(k),θj(k)分別是k時刻第i,j條航跡中目標的方位角量測值,φi(k),φj(k)分別是k時刻第i,j條航跡中目標的俯仰角量測值。一般的方法是采用角度差值絕對值的方法作為模糊因子的計算方式,本文同時考慮到方位角和俯仰角,根據標準差計算的思想,定義模糊因子如下:

②屬性信息的模糊因子。依據D-S證據理論實現屬性信息的模糊化,m k?i與m k?j是k時刻第i,j條航跡的目標身份基本概率賦值,則得組合后模糊因子:

2)建立模糊評判集
模糊評判集的一般形式為V={v1,v2,…,v m},m表示模糊評判的級別[11]。航跡關聯問題的模糊評判集,是V的一個子集。根據航跡關聯的實際問題,可將模糊評判集分為3個級別,即為關聯、不關聯或者不確定,具體形式為V={v1=關聯,v2=不關聯,v3=不確定}。
在直積集U×V上定義的從U到V的單因素模糊評判矩陣為

式中,r kl表示考慮第k個因素時兩條航跡關聯得到的第l種結果的可能度,記為

在位置因素中,由于傳感器具有系統誤差和量測誤差,觀測結果與目標真實位置之間通常存在一定的偏差,假設這個偏差小于分辨率δ。則目標位置間的角度差小于δ時,可以認為兩條航跡源于同一個目標,如果距離達到3δ時,兩個觀測為同一目標的可能性下降為10%,大于3δ之后,隨著歐氏距離增大,是同一個目標的可能性就變得很小。則可設置如下的隸屬度函數:

在屬性因素中,u2(k)描述了k時刻成像偵察衛星對第i個目標與電子偵察衛星傳感器對第j個目標關于屬性測量(即目標身份)的不一致測度。因此,可定義屬性因素的隸屬函數為

已定義的評價級別m=3,所以單因素模糊評判矩陣為

實際的航跡關聯問題,由于異類傳感器的測量精度不同,加之環境復雜,雜波數量較多,需要綜合考慮多個因素,要根據實際情況為各因素分配權重。所以航跡關聯的判決結果就是由因素權重模糊集A和評判矩陣R的復合作用,即由它們合成得到V上的關于兩航跡關聯程度的模糊集B為

式中,b l表示兩條航跡關聯對于第l個評價級別v l的隸屬度。
因素權重模糊集的一般選擇a1≥a2≥…≥a n,并且最后幾個因素的權重均較小。針對實際傳感器的航跡關聯的特點,應依據模糊因素子集中各個相關因素對判決的重要程度對模糊因素子集U進行權值分配。目標的角度數據由于是兩類傳感器唯一的位置公共測量信息,所以是關聯中最重要的因素,其次是目標身份的相似度,則可取α1=0.75,α2=0.25。
對于模糊集的合成運算來說,在計算b l時有多種模型,其中典型的有“主因素決定型”、“加權平均型”和“混合型”三種算法。混合型算法綜合了主因素決定型和加權平均型的優缺點,并通過混合稀疏α調整[11]。具體形式為

即在混合型算法中,主因素決定型的結果用α加權;同時采用普通矩陣乘法形式,但相乘時用析取,相加時用合取,用1-α加權[9]。
計算出多因素綜合相似度的模糊關聯矩陣后,討論模糊判決規則的選定。最常用的判決規則是最大隸屬度原則,即b l=max(b1,b2,b3),但實際應用中,由于應用環境的不同,使用最大隸屬度原則判決航跡相關可能達不到理想效果,可根據不同應用環境選用不同的判決規則。本文選擇以下方式進行判決:①若b1-b2>ε,且b1>b3,則判斷為航跡關聯;②若b2-b1>ε,且b2>b3,則判斷為航跡不相關;③其余情況則判斷航跡關系不確定。其中,ε為預設門限,通過經驗值來確定。對于未關聯的航跡,繼續參與下一次關聯,若連續三次關聯不上,則認定進行未關聯航跡處理。以航跡是否真實存在為判斷目的,使用意見一致性理論進行處理。
相關門限的確定,需要做大量的模擬實驗。若門限設置偏高,則目標航跡難以關聯且漏關聯概率增大;反之,若門限偏低,則錯關聯概率可能增大。由于目標出現機動,各傳感器對機動的反應時間不同,需要適當地調整門限,以免出現較多的錯誤關聯,因而,門限需要具有自適應的優化能力。
3 仿真實驗
以成像偵察衛星和電子偵察衛星跟蹤1艘大型艦船為例進行航跡相關判定的仿真實驗,這里僅考慮航跡相關問題,而略去對目標的跟蹤過程。仿真實驗中,用運動模型仿真了艦船的軌跡,用量測模型生成相應的成像偵察衛星和電子偵察衛星的量測數據,并用Kalman濾波對其進行跟蹤。假設目標初始位置已知,作勻速運動。
本文主要研究的航跡關聯問題,仿真過程中假設已經完成目標跟蹤,并且已進行過時空對準。假設偵察衛星方位角、俯仰角的測量誤差標準差分別為成像偵察衛星σ?=σε=20μrad,電子偵察衛星σ?=σε=15μrad。模糊因素集選為U,與之對應的權值為A={a1=0.75,a2=0.25},合成運算模型選用混合型模型,由式(20)、(23)確定基于2個因素判決兩航跡相似的隸屬度。用蒙特卡羅方法進行了100次仿真。仿真結果如圖2~6所示。

圖2 艦船目標的軌跡圖

圖3 目標的經緯度均方根誤差
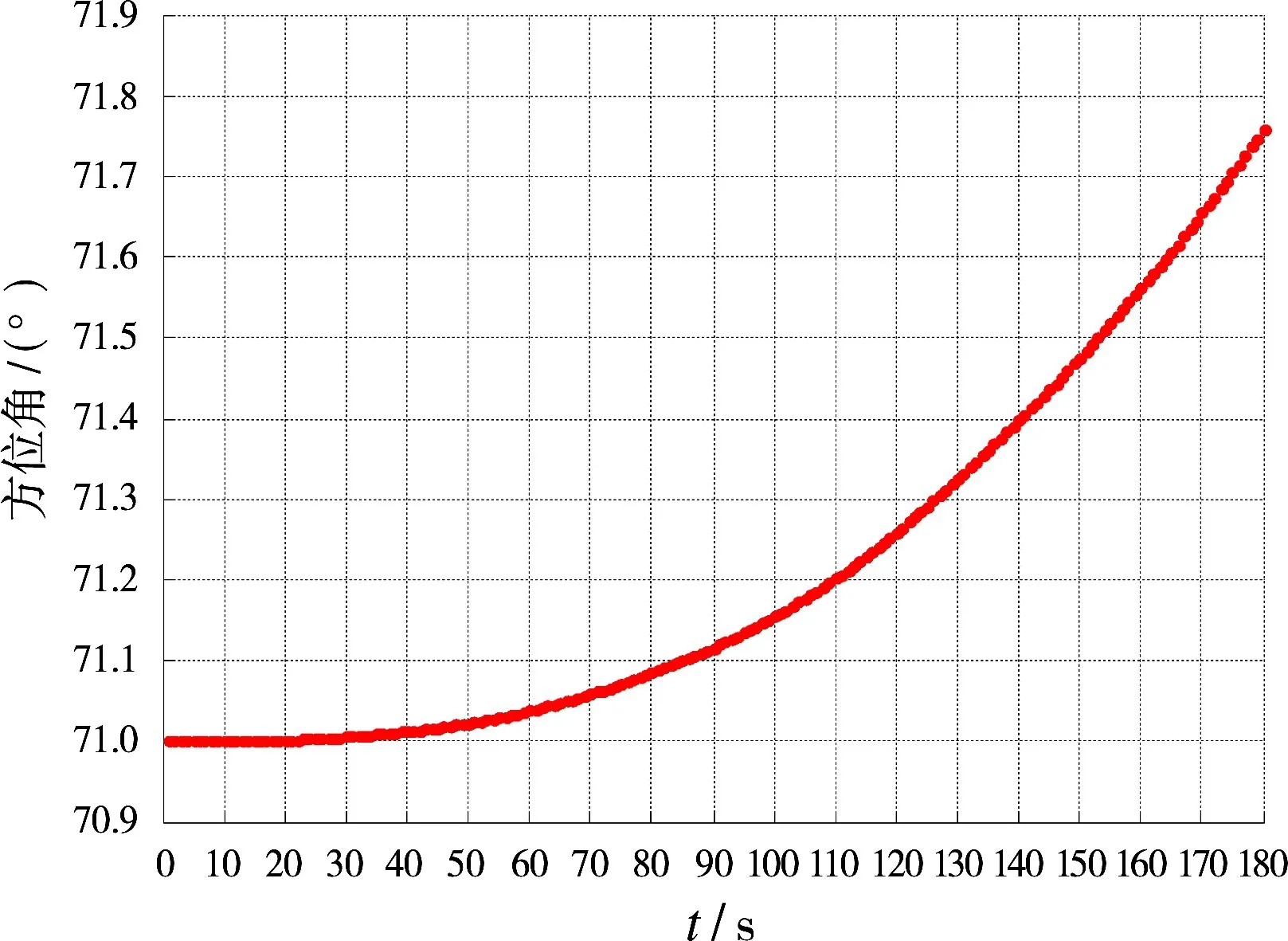
圖4 目標方位角變化曲線
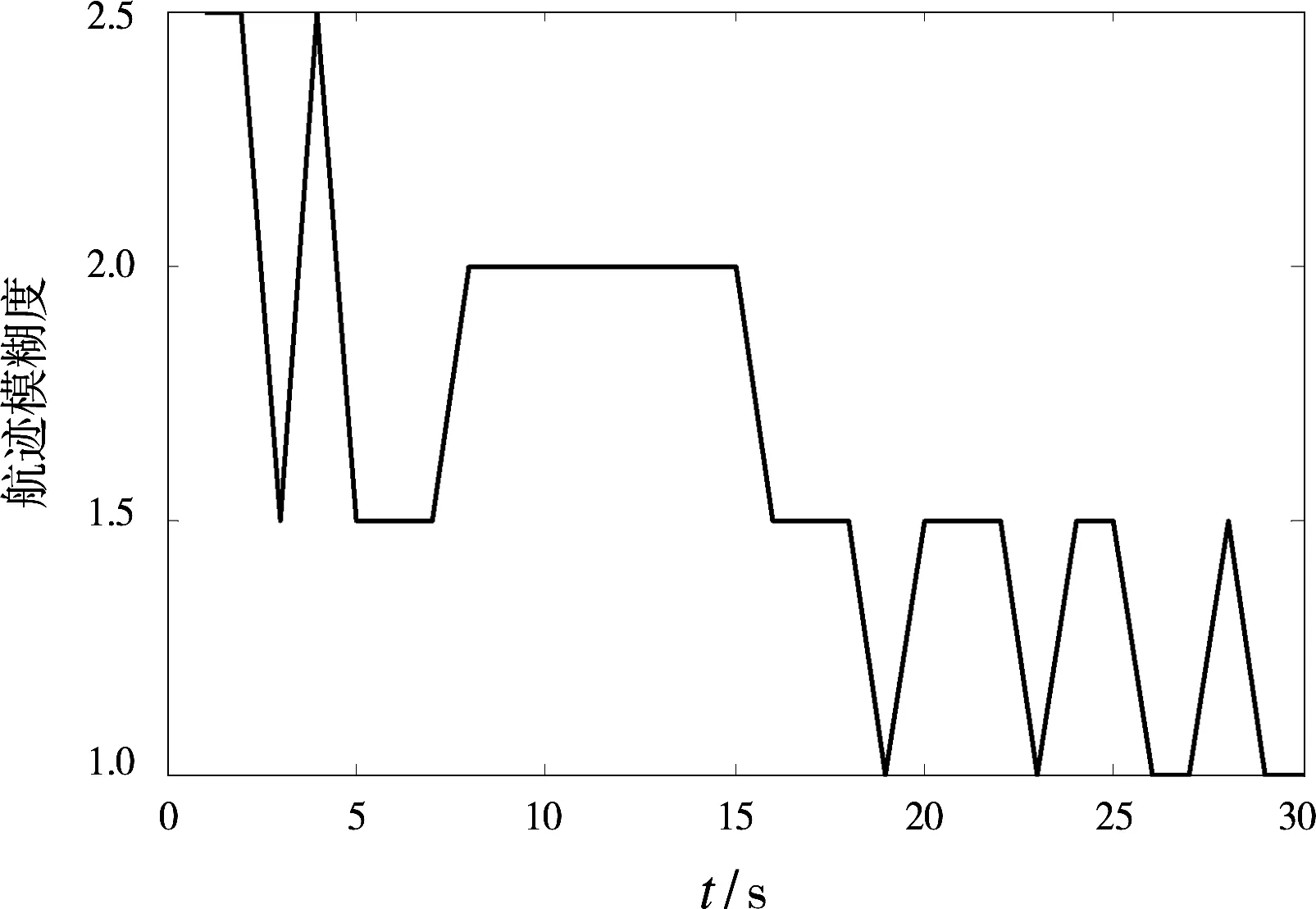
圖5 目標航跡的模糊度
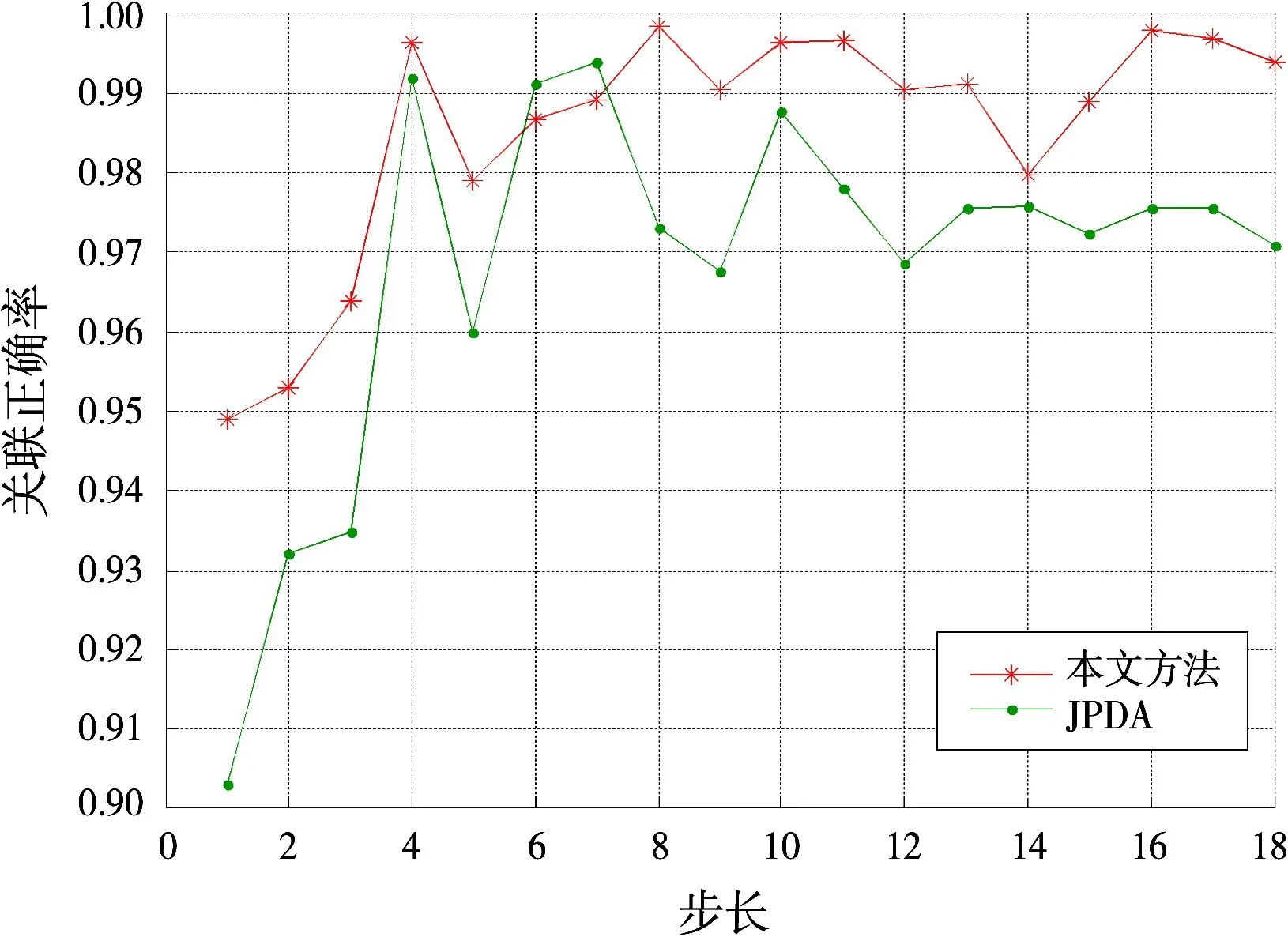
圖6 關聯正確率曲線
其中,圖2為艦船目標的一段真實軌跡,圖3為目標的經緯度均方根誤差,圖4為目標某時間段的方位角變化曲線,圖5為目標航跡的模糊度,圖6為采用多因素模糊綜合決策精關聯后的關聯正確率曲線,并在相同的條件下與傳統的統計方法(JPDA方法)進行了比較。實驗證明:本文算法計算速度較高,且關聯正確率可以達到98%,明顯高于JPDA的84%。
4 結束語
航天偵察在目標監視方面具有巨大的優勢,如何利用多種航天偵察手段實現目標航跡關聯是急需解決的問題。本文立足航天偵察傳感器的探測特點,從方位角和屬性信息的角度出發,提出一種基于多因素模糊綜合決策的航天偵察航跡關聯算法。并通過實驗對算法進行了驗證,結果表明:提出的算法具有較高的航跡關聯正確率。
本文對不同手段的航天偵察航跡關聯問題進行了研究,在一定程度上解決了單一航天偵察條件下的航跡關聯問題。然而,如何將航天偵察情報與其他情報信息(如天波超視距雷達情報、大型相控陣雷達情報)進行融合實現目標綜合航跡關聯,將是未來進一步需要解決的難題。
[1]李丹,于小紅.多傳感器信息融合在航天偵察中的應用[J].兵工自動化,2012,31(3):86-88.
[2]曾昊.基于星載異類傳感器的艦船編隊目標數據關聯方法研究[D].長沙:國防科技大學,2008.
[3]HE You,LU Dajin,PENG Yingning.Review of Track Correlation Algorithms in Distributed Multisensor Systems[J].Systems Engineering and Electronics,1999,21(10):15-18.
[4]王壯,樊昀,王成,等.基于星載電子偵察與成像偵察的數據融合技術[J].電子學報,2003,31(12A):2127-2130.
[5]井沛良,劉方.一種使用修正模糊隸屬度的航跡關聯方法[J].應用科學學報,2012,30(2):181-186.
[6]周永豐,張圣華.純方位線性插值問題研究[J].艦船電子工程,2003,23(6):37-42.
[7]張中科,方青,田明輝.基于純方位信息的多傳感器航跡融合仿真分析[J].艦船電子對抗,2014,37(3):1-6.
[8]范恩,謝維信,劉宗香.異類傳感器合成量測的模糊航跡起始方法[J].信號處理,2013,29(11):1439-1445.
[9]郭徽東,章新華.基于模糊綜合函數的航跡關聯算法及其應用[J].系統工程與電子技術,2003,25(11):1401-1403.
[10]井沛良.多傳感器數據關聯中的關鍵技術研究[D].長沙:國防科技大學,2011.
[11]柳超,關鍵,黃勇,等.基于PHD的多目標檢測前跟蹤改進方法[J].雷達科學與技術,2016,14(1):1-6.LIU Chao,GUAN Jian,HUANG Yong,et al.An Improved Multitarget Track-Before-Detect Algorithm Based on Probability Hypothesis Density Filter[J].Radar Science and Technology,2016,14(1):1-6.(in Chinese)
[12]宋新景.基于極化特征的雷達目標識別技術[J].雷達科學與技術,2016,14(1):39-44.
[13]李志匯,劉昌云,倪鵬,等.反導多傳感器協同任務規劃綜述[J].宇航學報,2016,37(1):29-38.
[14]董凱,劉瑜,王海鵬.空間鄰近目標跟蹤與航跡關聯的聯合優化算法[J].宇航學報,2014,35(10):1211-1217.
[15]陳輝,韓崇昭.機動多目標跟蹤中的傳感器控制策略的研究[J].自動化學報,2016,42(4):512-523.
[16]范恩.基于模糊信息處理的傳感網系統中多目標跟蹤方法[D].西安:西安電子科技大學,2015.
A Track Correlation Algorithm of Space-Based Reconnaissance Based on Rough and Precise Correlations
WEI Qiang1,2,LIU Zhong1
(1.Electronics Engineering College,Naval University of Engineering,Wuhan430033,China;2.Air Force Early Warning Academy,Wuhan430019,China)
As for the space-based reconnaissance,the optical reconnaissance can achieve the precise target azimuth information,and the electronic reconnaissance can achieve the precise target attributes.To make a track correlation by use of these characteristics,this paper proposes a track correlation algorithm based on the rough and precise correlations.The rough correlation is firstly conducted via the azimuth information,then the precise correlation model is conducted via the multi-dimensional attributes,and finally the results are achieved.The temporal and space alignment method of space-based reconnaissance sensors is given,and the track correlation algorithm based on multi-factor fuzzy comprehensive decision is presented in detail.Simulations are made to verify the performance of the proposed algorithm.Results show that the proposed method can solve the problem of track correlation of space-base reconnaissance equipments well,and it has a higher correlation accuracy compared to the traditional JPDA algorithm.
space-based surveillance;track correlation;fuzzy comprehensive decision;rough correlation;precise correlation
TN957
A
1672-2337(2017)01-0029-06
10.3969/j.issn.1672-2337.2017.01.005
2016-07-22;
2016-09-09
國家自然科學基金(No.61102168)

尉強男,1982年出生,山西臨汾人,博士研究生,主要研究方向為指揮自動化。E-mail:yangqihong0354@163.com
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
當代陜西(2019年15期)2019-09-02 01:52:00
學苑創造·A版(2018年11期)2018-02-01 06:29:20
中華手工(2017年2期)2017-06-06 23:00:31
讀者(2017年5期)2017-02-15 18:04:18
中外會展(2014年4期)2014-11-27 07:46:46
當代修辭學(2011年2期)2011-01-23 06:39:12
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
