微型燃氣輪機的微網管理與控制策略
2018-01-15 03:16:10安英會
裝備制造技術 2017年11期
安英會
燃氣輪機冷熱電聯供系統是指制冷、供暖、發電三者合一的燃氣輪機用戶系統,通常配置的裝置有燃氣輪機發電機、燃氣輪機余熱供暖系統、燃氣輪機余熱制冷系統以及控制裝置。冷熱電聯產有助于能源的更為合理分配、使用與經濟運行[1]。系統由3臺30 kW的微型燃氣輪發電機、兩臺15萬大卡的余熱煙氣溴化鋰型吸收式空調、兩臺15萬大卡熱水爐和一臺可產生12 m3/h流量的換熱器以及一臺15 kW的低溫吸附式制冷機組成。
余熱煙氣溴化鋰型吸收式空調用于制冷,熱水爐用于供暖和洗澡用水,具有儲存功能,換熱器可以用于供暖和洗澡,也可以通過循環泵給15 kW的低溫吸附式制冷機制冷用。通常制冷設備、燃氣輪機以及熱水鍋爐均需要并列運行。冬天熱負荷較高的情況下余熱系統用于供熱,夏天冷負荷較高的情況下主要用于制冷,低溫余熱制冷器可以調整冷熱負荷。燃氣輪機發電通過并網控制器接入電網,并配置有無功補償器調整發電機無功輸出。
微型燃氣輪機的微網管理主要是并網情形下以冷熱定電[2],離網情形下可以通過配置電制冷、制熱系統亦可以以冷熱定電,供電負荷可以在離網情形下進行優化配置[3]。本文介紹了一種微型燃氣輪機串級控制策略,能較好地在滿足冷熱電等負荷需求的情況下,實現燃氣輪機轉速及燃料的控制。仿真性能曲線表明,本文介紹的微型燃氣輪機的微網管理與控制策略具有響應迅速,控制穩定的特征。
1 燃氣輪機動態模型[2]
燃氣輪機的工作過程是,壓縮機壓縮后的空氣進入燃燒室,與噴入的燃料混合后燃燒,成為高溫燃氣,隨即流入燃氣透平中膨脹作功,推動透平葉輪帶著壓氣機葉輪一起旋轉并輸出機械功率,燃機帶動發電機輸出電功率。燃氣輪機包括燃料伺服系統、壓縮機、燃燒室、透平室、異步發電機。其動態模擬結構如圖1所示。
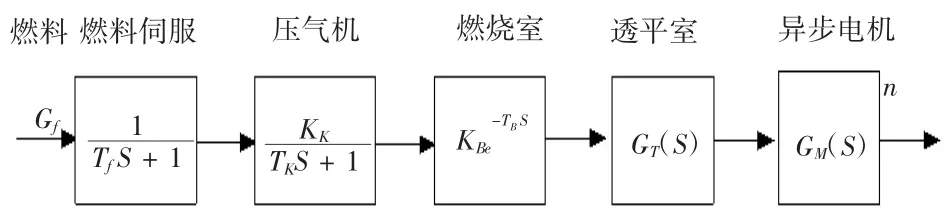
圖1 燃氣輪機動態模擬結構方框圖
燃料伺服機構應用慣性環節模擬,標記為Gf(S),Gf(S)的傳遞函數為:

其中,Tf為燃料伺服機構的慣性常數,由伺服機構的管路特性確定。
壓氣機應用具有增益的慣性環節模擬,標記為Gk(S),Gk(S)的傳遞函數為:

其中,Tf為壓氣機的慣性常數,由壓氣機的容量特性確定,Kk為壓縮比,由壓氣機的壓縮比性能確定。
燃燒室由具有增益的純延遲環節模擬,標記為GB(S),GB(S)的傳遞函數為:

其中,TB為燃燒室的延遲時間常數,由燃燒室的燃燒特性確定;KB為質能比,由燃燒室的燃燒效率、燃料的熱值等確定。
將透平室僅僅看做能量轉換場所,不考慮轉矩計算,轉矩計算在異步電動機部分加以考慮。透平室傳遞函數可以用能效曲線,為了平滑曲線,簡化考慮各種工況下的能效近似為線性,同樣用具有增益的線性環節替代能效曲線,則透平室的傳遞函數標記為GT(S),GT(S)的傳遞函數為:

其中,TT為透平室的延遲時間常數,由透平室的噴嘴及葉片特性確定;KT為效能比,由透平室的能效確定;T1,T2為能效曲線的近似線性參數。
異步電動機來自與透平的輸出轉矩為TT(S)。

其中,K1系數與透平轉換效率相關,K2系數為轉速相關系數。
為了簡化,不考慮異步電機的電磁函數,將異步電動機的負載看成慣性轉矩,則異步電機的傳遞函數標記為 GM(S),GM(S)的傳遞函數為:

其中,Tr為軸系的轉動慣量[3,4]。
2 燃氣輪機的微網控制
并網情形下,為了實現燃氣輪機的以“冷熱定電”的控制策略,并列運行的三臺燃氣輪機均可以采用PV控制方法,通過控制燃氣輪機的進氣量來維持燃氣輪機的有功輸出,控制燃氣輪機的輸出功率P和機端電壓V的恒定。機端電壓V控制需要保持勵磁電壓的恒定,并網情形下,燃氣輪機的轉速可以視為恒定。
離網情形下,亦可以通過調整燃氣量控制燃氣輪機的輸出功率P和燃氣輪機的轉速或頻率f.考慮到燃氣輪機輸出為直流,需要考慮到整流、濾波等因素,則微型燃氣輪機有功功率輸出P可以簡單由式(7)來計算[5]。

其中,X為整流逆變的等效電抗,Uinv為逆變器的輸出電壓,E為機端電壓,δv為二者之間的夾角。
燃氣輪機發電調整實質是指燃氣輪機轉速調整,通常是在離網狀況下進行的,即當燃氣輪機實際轉速n與給定轉速n0發生偏差△n后通過調整燃氣供應量Gf來維持轉速平衡,燃氣輪機控制回路干擾為r.控制回路采用PID調節器,當發電機轉速高于警告值時切除燃氣輪發電機或切除用電負荷。其控制原理如圖2所示。
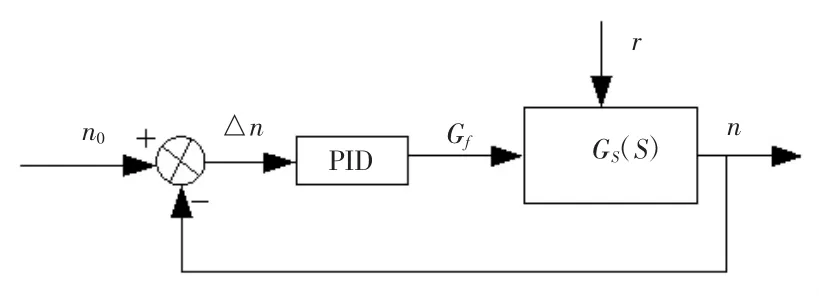
圖2 微型燃氣輪機發電調整控制原理方框圖
其中GM(S)的整體傳遞函數參看圖1以及式(1)~(7)。
燃氣輪機冷熱電聯供能量管理系統中由于燃氣輪機為單臺、兩臺或三臺并列運行,調節指令Gf指優先一臺接近滿負荷運行,再梯次分配給其它燃氣輪機,為了減少擾動,實際采用串級調整方案。即在圖2所示的控制回路增加負荷平衡控制外環,負荷指令通過負荷監控端或設定端作為設定值,燃氣輪機通過Gf分配調整后先滿足負荷的需求,再逐步調整Gf滿足轉速需求。控制框圖如圖3所示。
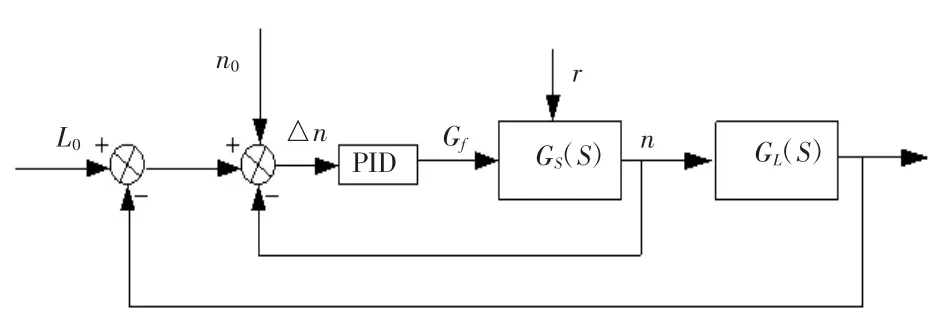
圖3 微型燃氣輪機串級控制原理方框圖
3 控制效果仿真及結論
為了驗證控制效果,仿真模型平臺為SIMULINK,用于參比的參數包括:負荷Load、燃料流量Fu以及煙氣溫度To,結果如圖4~5所示。仿真計算結果采用標幺值形式用于比較仿真時間步長取為0.1 s.如圖4所示為燃氣輪機甩負荷控制效果,時間軸的單位是秒。即設定第3 s機組從滿負荷突然甩負荷至空載運行,仿真過程持續10 s.如圖5所示為燃氣輪機增負荷過程中的控制效果,從60%負荷增至100%負荷。本文為了實驗簡便,只選擇了一臺燃氣輪機作為仿真對象。圖4、圖5數據說明通過本文所設計的控制策略,燃氣輪機可以非常快速穩定實現負荷輸出與調整,即實現以熱定電控制模式。
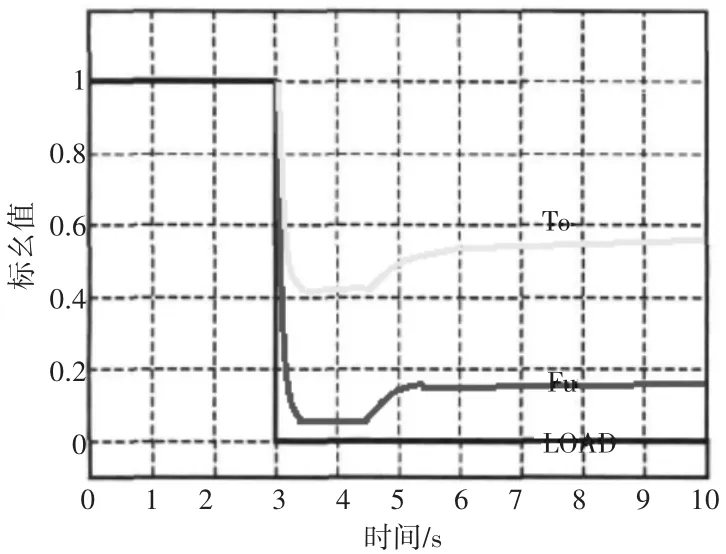
圖4 燃氣輪機甩負荷控制效果
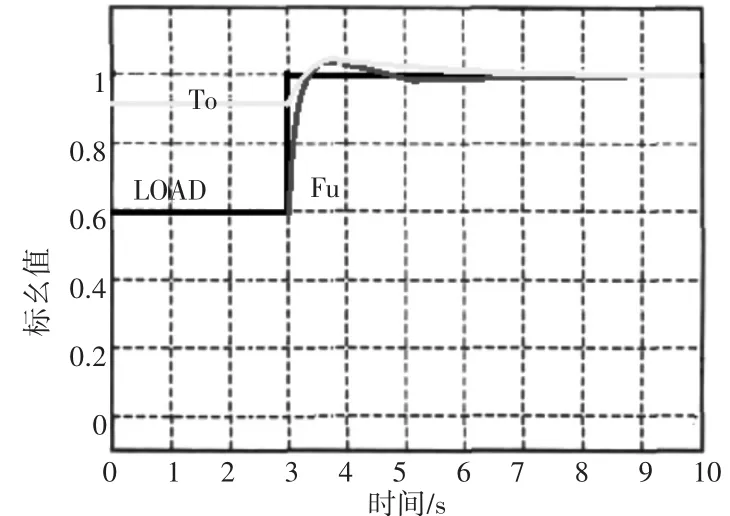
圖5 燃氣輪機增負荷控制效果
[1]朱成章.從小型熱電聯產走向冷熱電聯產[J].能源技術,2000(1):29-30.
[2]段建東,孫 力,趙 克,等,一種微型燃氣輪機抗擾控制器設計及驗證方法[J].電機與控制學報,2012(6):19-24.
[3]SOON K Y,HUGHES F M,MILANOVIC J V.Comparative analysis and reconciliation of gas turbine models for stability studies[J].IEEE PowerEngineering Society GeneralMeet ing,Tampa,2007.
[4]SAHA A K,CHOWDHURY S,CHOWDHURY S P,et al.Modeling and performance analysis of a microturbine as a distributed energy resource[J].IEEE Transactions on Energy Conversion,2009,24(2):529-538.
[5]Bergen A R.Power systems analysis[M].Englewood Cliffs,NJ,USA:Prentice-Hall,1986.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2014年17期)2014-04-04 11:56:50
