一種基于線架的機構運動學仿真建模方法
2018-01-15 03:16:20董萌
裝備制造技術 2017年11期
關鍵詞:模型
董 萌
0 引言[1]
在CATIA“開始”菜單中的“DMU運動機構”平臺中,預置了多樣的運動副,設計員可根據自己的風格,或借助幾何點/線/面,或借助實體模型,或借助局部坐標系,搭建機構運動學仿真模型,進一步可生成機構中某一構件的相對或絕對掃掠體,有助于間隙檢查并明確構件的絕對或相對路徑。因運動機構運動學仿真建模方法多樣性,導致工程應用中模型的通用性較差,難于維護,特別是在復雜系統中,如飛機、汽車、輪船等,如果子模型構架不同時,需要耗費相當長的時間和花費相當多的精力用于模型梳理。
以CATIA為平臺,本文提出一種基于線架的機構運動學建模方法,以避免在動力學分析中重復工作。CATIA中創建的機構運動學仿真模型,可無縫導入LMS Virtual.Lab中,避免在LMS Virtual.Lab中重復的運動學建模,可直接開展邊界定義、驅動定義、接觸定義、AMESim接口定義等,建立機構的動力學模型。由于CATIA機構運動仿真建模的極具靈活性,不利于在動力學仿真中布置傳感器、接觸力等。
1 機構運動學建模
機構運動學建模,其目的之一是在各運動構件之間通過運動副連接,借助仿真平臺的可視化特性,直觀地觀察各個角度觀察機構運動情況,各構件間及構件與周圍結構間的間隙變化,驗證機構運動的合理性和可行性。在CATIA的DMU運動機構中,常見運動副及其相對自由度見表1.空間運動機構的自由度計算見式(1)[2]。
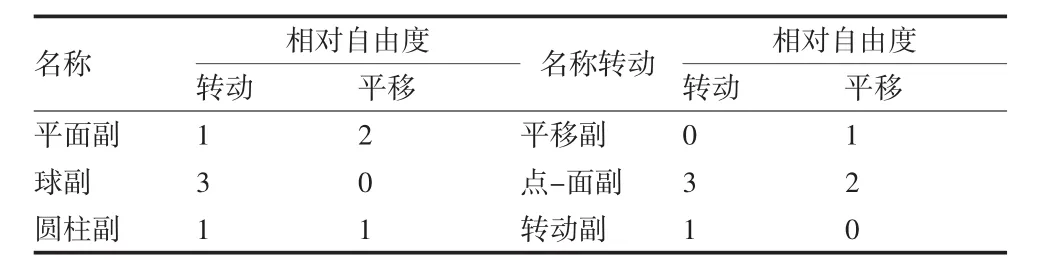
表1 常見運動副相對自由度

其中,F為機構自由度,Pi為可提供i個約束的運動副數,M為各運動副的公共約束數。
一般地,機構自由度等于機構所需的主動件數。將驅動力視為一種約束,當且僅當機構自由度為零時,機構才能被仿真。
2 建模流程
基于線架的CATIA機構運動仿真建模流程,共分三大步。
第一步:建立機構的線架模型。通過CATIA幾何作圖,確定機構在起止位置的幾何元素(點/線/面)的位置。
(1)創建接口點;
(2)新建幾何圖形集,繪制機構起始位置線架模型;
(3)新建幾何圖形集,繪制機構終止位置線架模型;
(4)在交點處,根據相鄰構件的運動關系,建立局部坐標系;
(5)發布設計狀態的機構線架元素(點和/或線、局部坐標系);
(6)保存并命名機構線架的Part.
第二步:建立機構線架的運動仿真模型。從線架模型上選取各構件相關的幾何元素,創建各構件的線架模型,并建立線架的運動仿真模型。
(1)在Product1下,為每個構件創建相應的Part文件;
(2)從線架Part中,復制每個構件對應的線架元素,保留鏈接粘貼構件的Part中;
(3)開始→DMUNavigator→DMU運動機構,激活運動仿真;
(4)為相鄰構件添加相應的運動副,觀察機構自由度數量;
(5)添加驅動;
如果機構自由度等于0,運行并檢查機制運行狀態,否則檢查運動副設計,轉至4);
(6)若機構運動狀態與預期結果一致,則進入下一步;若偏離預期結果,則檢查運動副設計,轉至4);
(7)保存Product1所有文件。
第三步:建立實體模型的運動仿真模型。導入線架運動仿真模型,將構件的實體模型“修飾”到相應線架上,建立實體運動仿真模型,進一步可獲取相應實體模型的掃掠體。
(1)新建Product2,并導入Product1及所有的實體數模;
(2)將Product2轉入設計模式,激活運動仿真,導入子機制;
(3)創建“機制裝飾”,為每個構件的線架,在結構樹中,選擇相應的實物數模;
(4)運行機制,查看運動狀態;
(5)必要時經由“仿真”、“回放”、“掃掠體”,可創建構件相對全局或某個構件的運動掃略體。
3 一般原則
(1)不考慮驅動力時,機構的自由度應大于0,機構的主動件數等于機構的自由度。
(2)將驅動力視為約束時,機構自由度應等于0,機構可以被仿真;
(3)不影響機構整體運動特性的自由度,如滾子的自轉,稱為局部自由度,主要是為了減少磨損,計算機構自由度是應去除不計;
(4)當兩個以上的構件用同一個鉸鏈連接時,形成復合鉸鏈,其轉動副的數目為組成該復合鉸鏈的構件數減去1;
(5)去除虛約束。虛約束包括:1)兩個構件間形成多個運動副時,只能算一個。2)不同構件上兩點距離始終保持不變。3)連桿上一點的軌跡為一直線。4)對運動不起作用的對稱部分。
(6)為了保持模型的通用性,建模過程嚴格遵循建模流程;
(7)在各構件交點處,建立局部坐標系,坐標系Z軸沿轉軸方向;
(8)為保持各構件數據與線架數據同步,需通過“發布”命令,在線架part中發布每個構件相關的元素,通過“選擇性粘貼”中的“按保持鏈接的結果”為每個構件粘貼已“發布”的構件元素;
(9)實體模型通過“修飾”,與相應構件連接。通過“修飾”連接的構件,僅在空間位置上同步。實體模型更改不會引起線架更改,線架模型更改也不會引起實體模型的更改;
(10)選取運動副時,應充分利用局部坐標系的原點、軸、面;
(11)如構件a、b、c通過b連接,構件b兩端為關節軸承,構件a和b的連接點為O,構件b和c的連接點為P,如圖1所示。添加運動副時,除了兩個球副外,為了限制構件b的沿自身軸線的轉動,對于構件b,在構件a(或c)與構件b的交點O(或P)引出一垂直于由關節軸承內環軸線和拉桿軸線OP構成的平面的垂線,在該垂線上任取一點M;對于構件a或c,在點O或點P作關節軸承內環軸線的垂面,限制點M在該垂面內運動,即點-面副。
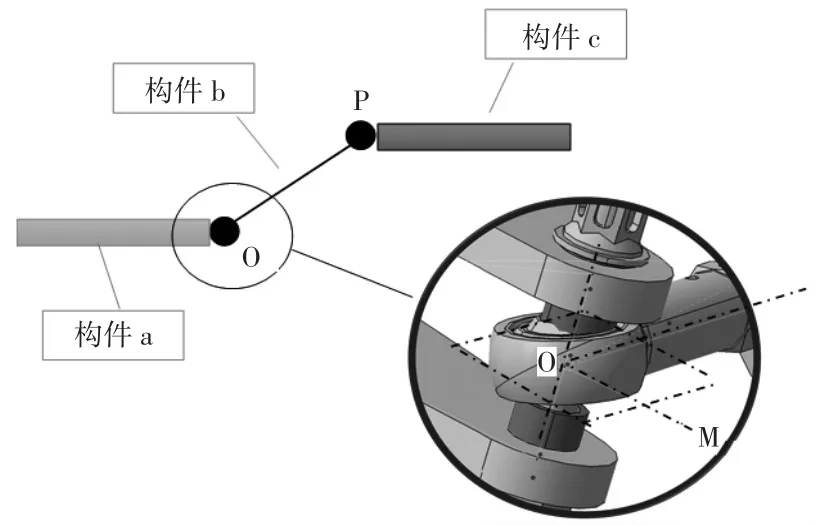
圖1 通過關節軸承串聯連接的三個構件
4 結束語
基于線架的機構運動仿真,以機構各交點位置為基礎,逐步建立具有內部數據同步的線架運動仿真模型,最后通過“修飾”命令將實體模型與仿真模型連接。該方法創建的運動仿真模型修改簡單,僅需修改交點位置,其他線架自動更新,便于維護與機構優化調試,且該方法將機構運動仿真模型與零組件實體模型的建模過程分離,開展并行建模,最后將模型整合在一起,提高建模效率。
[1]劉宏新,賈 儒.CATIA數字樣機:運動仿真技術[M].北京:機械工業出版社,2016.
[2]成大先.機械設計手冊.單行本.機構[M].北京:化學工業出版社,2004.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
